
10.4: Un ejemplo de espacio de fase
- Page ID
- 52878

Para un ejemplo de encontrar equilibrios y estabilidad, considere dos especies competidoras con tasas de crecimiento intrínseco r 1 = 1.2 y r 2 = 0.8. Deje que cada especie se inhiba a sí misma de tal manera que s 1,1 =−1 y s 2,2 =−1, deje que la Especie 2 inhiba a la Especie 1 más fuertemente de lo que se inhiba a sí misma, con s 1,2 =−1.2, y deje que la Especie 1 inhiba a la Especie 2 menos sí mismo, con s 2,1 =−0.5. Estas condiciones se resumen en el recuadro 10.2.2 para referencia. La pregunta es, ¿cuáles son los equilibrios en este sistema competitivo en particular, y cuál será su estabilidad?
Primero, hay un equilibrio en el origen (0,0) en estos sistemas, donde ambas especies están extintas. Esto a veces se llama el “equilibrio trivial”, y puede o no ser estable. Del Cuadro 10.2.1, los valores propios del equilibrio en el origen son r 1 y r 2 —en este caso 1.2 y 0.8. Ambos son positivos, por lo que a partir de las reglas para los valores propios en el recuadro 10.2.1, el equilibrio en el origen en este caso es inestable. Si no existen individuos de ninguna de las especies en un área, no surgirá ninguno. Pero si algún individuo de alguna de las especies llega de alguna manera a la zona, o si llegan ambas especies, la población aumentará. Este equilibrio es, pues, inestable. Se muestra en el diagrama de espacio de fase de los\(\PageIndex{1}\), along with the other equilibrios de figura en el sistema.
caja\(\PageIndex{1}\) calculated results for the sample competitive system
| Equilibrio | Coordenadas | Valores propios | Condición |
| Origen | (0,0) | (1.2,0.8) | Inestable |
| Eje horizontal | (1.2,0) | (-1.2,0.2) | Inestable |
| Eje vertical | (0,0.8) | (-0.8,0.24) | Inestable |
| Interior | (0.6,0.5) | (-0.123, -0.977) | Estable |
En el eje horizontal, donde la Especie 2 no está presente, el equilibrio de la Especie 1 es N' 1 = − r 1/s 1,1 = 1.2. Eso es como se espera —es igual que el equilibrio de N' = − r/s para una sola especie— porque de hecho es una sola especie cuando la Especie 2 no está presente. En cuanto a la estabilidad, un valor propio es − r 1, que es −1.2, que es negativo, por lo que no causará inestabilidad. Para el otro valor propio en este equilibrio, es necesario calcular q a partir de la Tabla 10.2.1. Deberías obtener q =−0.2, y si lo divides por s 1,1, deberías obtener 0.2. Esto es positivo, por lo que según las reglas de los valores propios en el recuadro 10.2.1, el equilibrio en el eje horizontal es inestable. Así, si la Especie 1 está en su equilibrio y llega un incremento de la Especie 2, la Especie 2 aumentará y se abandonará el equilibrio.
Asimismo, en el eje vertical, donde la Especie 1 no está presente, el equilibrio de la Especie 2 es N 2 = − r 2 /s 2,2 = 0.8. Calcula los valores propios en este equilibrio a partir de la Tabla 10.2.1 y deberías obtener p =−0.24, y dividiendo por s 2,2 dar valores propios de −0.8 y 0.24. Con uno negativo y el otro positivo, por las reglas de los valores propios en el recuadro 10.2.1 el equilibrio sobre el eje vertical también es inestable.
Finalmente, para el cuarto equilibrio, el equilibirum interior donde ambas especies están presentes, se calcula a, b y c a partir de la tabla. Deberías obtener a =−0.4, b =−0.44 y c =−0.048. Ahora el equilibrio interior es N' 1 = p/a = 0.6 y N' 2 = q/a = 0.5.
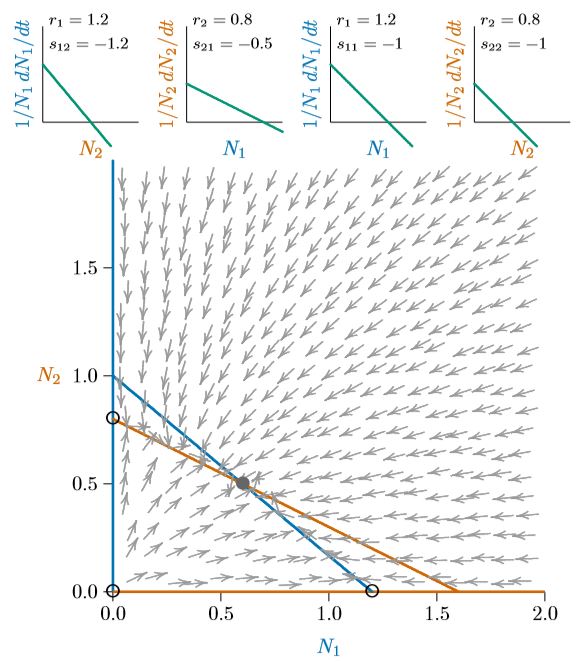
Pero, ¿es estable? Observe la fórmula para los valores propios del equilibrio interior en el Cuadro 10.2.1, en términos de a, b y c. ¡Es simplemente la fórmula cuadrática! Esta es una pista de que los valores propios están incrustados en una ecuación cuadrática, ax 2 + bx + c = 0. Y si inicias un proyecto para derivar la fórmula de los valores propios con lápiz y papel, verás que efectivamente lo son. En cualquier caso, trabajándolo de manera más simple a partir de la fórmula en la tabla, debería obtener −0.123 y −0.977. Ambos son negativos, por lo que según las reglas del recuadro 10.2.1 el equilibrio interior para este conjunto de parámetros es estable.
Como nota final, la presencia de la raíz cuadrada en la fórmula sugiere que los valores propios pueden tener partes imaginarias, si la raíz cuadrada cubre un número negativo. Las reglas de los valores propios del recuadro 10.2.1 siguen aplicándose en este caso, pero sólo a la parte real de los valores propios. Supongamos, por ejemplo, que los valores propios son\(\frac{-1\pm\sqrt{-5}}{2}\,=\,-0..5\pm\,1.118i\). Estos serían estables porque la parte real, −0.5, es negativa. Pero resulta que debido a que la parte imaginaria,\(\pm\,1.118i\), no es cero, el sistema circularía alrededor del punto de equilibrio, como lo hacen los sistemas depredador-presa.
Al cerrar esta parte de la discusión, debemos señalar que los vectores propios y los valores propios tienen amplias aplicaciones. Revelan, por ejemplo, orbitales electrónicos dentro de los átomos (derecha), alineación de múltiples variables en estadística, modos vibracionales de cuerdas de piano, y tasas de propagación de enfermedades, y se utilizan para una abundancia de otras aplicaciones. Preguntar cómo se pueden usar los valores propios es un poco como preguntar cómo se puede usar el número siete. Aquí, sin embargo, simplemente los empleamos para evaluar la estabilidad de los equilibrios.
amplias aplicaciones. Revelan, por ejemplo, orbitales electrónicos dentro de los átomos (derecha), alineación de múltiples variables en estadística, modos vibracionales de cuerdas de piano, y tasas de propagación de enfermedades, y se utilizan para una abundancia de otras aplicaciones. Preguntar cómo se pueden usar los valores propios es un poco como preguntar cómo se puede usar el número siete. Aquí, sin embargo, simplemente los empleamos para evaluar la estabilidad de los equilibrios.
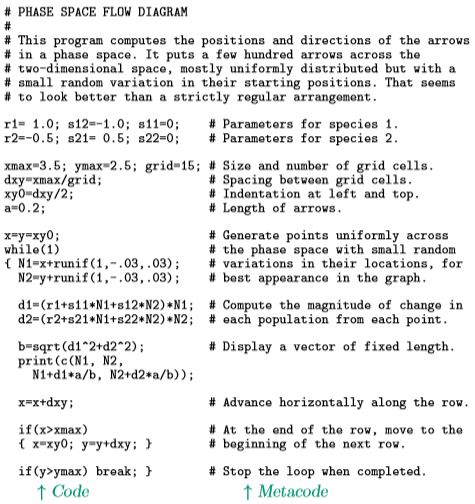
Programa\(\PageIndex{1}\) Muestra programa en R para generar un espacio de fase de flechas, mostrando las ubicaciones del principio y los extremos de las flechas, las cuales se pasan a través de un programa gráfico para su visualización. La declaración 'while (1) 'significa “while forever”, y es solo una manera fácil de mantener el bucle hasta que las condiciones en la parte inferior del bucle detecten el final y salgan.