
13.3: Compensación cambiando la función de transferencia del amplificador
- Page ID
- 84354

Si la función de transferencia de bucle abierto de un amplificador operacional es fija, esta restricción, combinada con el requisito de lograr una función de transferencia de bucle cerrado ideal especificada, restringe severamente los tipos de modificaciones que se pueden hacer a la transmisión en bucle de conexiones usando el amplificador. Generalmente es posible una flexibilidad significativamente mayor si se puede modificar la función de transferencia de bucle abierto del amplificador. Hay una serie de amplificadores operacionales de circuito integrado disponibles que permiten este tipo de control. Por el contrario, muy pocos diseños de componentes discretos están destinados a ser compensados por el usuario. La diferencia puede ser histórica en origen, ya que los primeros amplificadores de circuito integrado utilizaron impedancias de derivación en varios nodos para compensación (ver Sección 8.2.2) y los condensadores grandes requeridos no pudieron incluirse en el chip. La compensación interna se hizo práctica ya que el diseño de dos etapas que utiliza retroalimentación de bucle menor para la compensación evolucionó, ya que se utilizan condensadores mucho más pequeños para compensar estos amplificadores. Afortunadamente, los fabricantes de circuitos integrados optan por seguir diseñando algunos amplificadores compensados externamente después de que evolucionara la tecnología necesaria para la compensación interna.
En esta sección, se describen algunas de las funciones útiles de transferencia de amplificador de bucle abierto que se pueden obtener mediante una compensación externa adecuada, y se evalúan analítica y experimentalmente varias posibilidades diferentes para un amplificador de circuito integrado particular.
Consideraciones Generales
Una pregunta evidente con respecto a los amplificadores compensados externamente es por qué deben usarse dado que hay unidades compensadas internamente disponibles. La respuesta depende del amplio espectro de aplicaciones del amplificador operacional. Dado que este circuito está diseñado para su uso en una multitud de aplicaciones de retroalimentación, es necesario elegir su función de transferencia de bucle abierto para asegurar la estabilidad en una variedad de conexiones cuando esta cantidad es fija.
El compromiso más utilizado es hacer que la función de transferencia de bucle abierto del amplificador esté dominada por un polo. La ubicación de este polo se elige de tal manera que la frecuencia de ganancia unitaria del amplificador se produce por debajo de las frecuencias donde otras singularidades en la función de transferencia del amplificador contribuyen a un desplazamiento de fase excesivo.
Este tipo de compensación garantiza la estabilidad si se aplica retroalimentación directa e independiente de la frecuencia alrededor del amplificador. Sin embargo, es demasiado conservador si se proporciona una considerable atenuación resistiva en la trayectoria de retroalimentación. En estos casos, la frecuencia de cruce del amplificador con retroalimentación disminuye, y el ancho de banda del circuito resultante es bajo. Por el contrario, si la red de retroalimentación o carga agrega uno o más polos de frecuencia intermedia a la transmisión en bucle, o si la ruta de retroalimentación proporciona ganancia de voltaje, la estabilidad sufre.
Sin embargo, si la compensación se puede seleccionar inteligentemente en función de la aplicación específica, se puede lograr el máximo rendimiento posible de un amplificador dado en todas las aplicaciones. Además, los terminales de compensación ponen a disposición nodos de circuito interno adicionales, y en ocasiones es posible explotar esta disponibilidad de formas que incluso el fabricante no ha considerado. El diseñador creativo que trabaja con circuitos integrados lineales pronto aprende a renunciar a tales grados de libertad solo a regañadientes.
A pesar de las claras ventajas de los diseños compensados por el usuario, los amplificadores compensados internamente superan a las unidades compensadas externamente. Estas son algunas de las razones ofrecidas por el comprador para esta preferencia contradictoria.
(a) La compensación de los fabricantes es óptima en mi circuito. (Esto es cierto en aproximadamente el 1% de todas las aplicaciones).
(b) Es más económico usar un amplificador compensado internamente ya que se eliminan los componentes y la mano de obra asociada a la compensación. (Varios fabricantes ofrecen circuitos por lo demás idénticos en versiones compensadas interna y externamente. Por ejemplo, la serie LM107 de amplificadores operacionales es idéntica a la familia LM1OA con la única excepción de que se incluye un condensador de\(30-pF\) compensación en el chip LM107. Los precios actuales de este y otros pares suelen ser idénticos. No obstante, esta excusa se ha utilizado desde hace mucho tiempo. Tan recientemente como 1970, los precios unitarios oscilaron entre $0.75 y $5.00 más para los diseños compensados dependiendo del rango de temperatura. Se pueden comprar muchos\(30-pF\) capacitores por $5.00.)
c) Los amplificadores operacionales pueden ser destruidos de los terminales compensadores. (Los amplificadores operacionales pueden ser destruidos desde cualquier terminal.)
(d) Los terminales compensadores son susceptibles de captación de ruido ya que se conectan a nodos de bajo nivel de señal. (Esta razón es ocasionalmente válida. Por ejemplo, la lógica de alta velocidad puede interactuar con un amplificador operacional adyacente a través de los terminales de compensación, aunque la derivación inadecuada de la fuente de alimentación es una causa mucho más frecuente de dicho acoplamiento).
e) Etc.
Después de una exposición suficiente a este tipo de racionalización, es difícil escapar a la conclusión de que la razón principal de la popularidad de los amplificadores compensados internamente es la incapacidad de muchos usuarios para determinar funciones de transferencia de bucle abierto adecuadas para diversas aplicaciones o para implementar estas funciones transfieren una vez que se han determinado. Un objetivo primordial de este libro es eliminar estas barreras para el uso de amplificadores operativos compensados externamente.
Cualquier discusión detallada y específica de los métodos de compensación del amplificador debe vincularse al diseño del amplificador. Se supone para el remainder de este capítulo que el amplificador a compensar es un diseño de dos etapas que utiliza retroalimentación de bucle menor para la compensación. Esta suposición es realista, ya que muchos amplificadores modernos comparten la topología de dos etapas, y ya que se anticipa que los nuevos diseños continuarán con esta tendencia por lo menos en el futuro cercano.
Cabe mencionar que los tipos de funciones de transferencia de bucle abierto sugeridas para aplicaciones particulares a menudo se pueden obtener con diseños distintos de amplificadores de dos etapas, aunque el método utilizado para realizar la función de transferencia deseada puede ser diferente del descrito en el material a seguir.
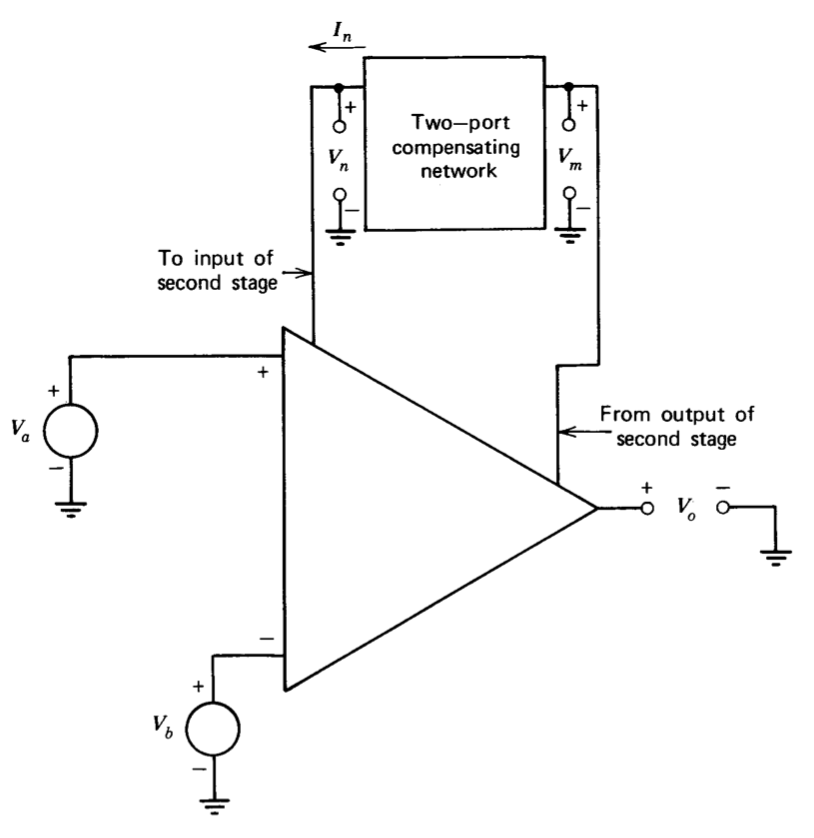
Figura 13.11 Amplificador operacional compensado con una red de dos puertos.
La Figura 13.11 ilustra la topología para un amplificador compensado con una red de dos puertos. Esta configuración básica ha sido descrita anteriormente en las Secciones 5.3 y 9.2.3. Si bien los detalles exactos dependen de los detalles específicos del amplificador involucrado, las conclusiones generales importantes introducidas en el material anterior incluyen las siguientes:
(a) La función de transferencia de bucle abierto descargada de un amplificador de dos etapas compensada de esta manera (suponiendo que el bucle menor es estable) es
\[a(s) = \dfrac{V_o (s)}{V_a (s) - V_b (s)} \simeq \dfrac{K}{Y_c (s)} \label{eq13.3.1} \]
en una amplia gama de frecuencias.
La cantidad\(K\) está relacionada con la transconductancia de los transistores de etapa de entrada, mientras que\(Y_c (s)\) es la admitancia de transferencia de cortocircuito de la red.
\[Y_c (s) = \dfrac{I_n (s)}{V_m (s)} |_{V_n = 0} \nonumber \]
Este resultado puede justificarse por razonamiento físico si recordamos que a frecuencias donde la transmisión del bucle menor formado por la segunda etapa y la red compensadora es grande, la entrada a la segunda etapa es efectivamente un terreno incremental virtual. Además, la corriente requerida en la entrada a la segunda etapa suele ser muy pequeña. Por lo tanto, se puede mostrar mediante un argumento similar al utilizado para determinar la ganancia ideal de bucle cerrado de un amplificador operacional que los cambios incrementales en la corriente de la etapa de entrada deben ser equilibrados por corrientes iguales en la red compensadora. Los parámetros del sistema se seleccionan normalmente para que el cruce de bucle principal ocurra en frecuencias donde la aproximación de la Ecuación\(\ref{eq13.3.1}\) es válida y, por lo tanto, esta aproximación a menudo puede ser utilizada para cálculos de estabilidad.
(b) La ganancia de bucle abierto d-c del amplificador es normalmente independiente de la compensación. En consecuencia, a bajas frecuencias, la aproximación de la Ecuación\(\ref{eq13.3.1}\) se sustituye por el valor constante ao. La aproximación falla porque
las redes compensadoras habituales incluyen un cero d-c en sus admitancias de transferencia, y a bajas frecuencias este cero disminuye la magnitud de la transmisión de bucle menor por debajo de uno.
c) La aproximación falla a altas frecuencias por dos razones. La magnitud de transmisión de bucle menor se vuelve menor a uno, y por lo tanto la red ya no influye en la función de transferencia de la segunda etapa. Esta función de transferencia normalmente tiene al menos dos polos a altas frecuencias, reflejando la carga capacitiva en la entrada y salida de la segunda etapa. Puede haber una mayor desviación de la aproximación debido a las singularidades asociadas con la etapa de entrada y la etapa de búfer que sigue a la segunda etapa. Estas singularidades no pueden ser controladas por el bucle menor ya que no están incluidas en él.
(d) La función de transferencia de bucle abierto del amplificador compensado se puede estimar trazando tanto la magnitud de la aproximación (Ecuación\(\ref{eq13.3.1}\)) como de la función de transferencia del amplificador no compensada en coordenadas comunes de magnitud logarítmica versus frecuencia logarítmica. Si la dinámica dominante del amplificador está asociada con la segunda etapa, la magnitud compensada de la función de transferencia de bucle abierto es aproximadamente igual a la menor de las dos curvas en todas las frecuencias. La función de transferencia de amplificador no compensada debe reflejar la carga de la red compensadora en la entrada y la salida de la segunda etapa. En la práctica, los diseñadores suelen determinar experimentalmente el rango de frecuencia sobre el cual la aproximación de la ecuación\(\ref{eq13.3.1}\) es válida para el amplificador y las redes compensadoras de interés.
En las siguientes secciones se describen varios tipos diferentes de compensación. Estas técnicas de compensación se ilustran usando un amplificador operacional LM301A. Este amplificador económico y popular es la versión comercial de rango de temperatura del amplificador LM1OA descrito en la Sección 10.4.1. Recordemos de esa discusión que la cantidad\(K\) es nominalmente\(2 \times 10^4\) mho para este amplificador, y que su ganancia de bucle abierto d-c especificada es típicamente de 160,000. El desplazamiento de fase de elementos fuera del bucle menor (principalmente los transistores lateral-PNP en la etapa de entrada) se vuelve significativo a 1 MHz, y las conexiones de retroalimentación que dan como resultado una frecuencia de cruce superior a aproximadamente 2 MHz generalmente son inestables.
En el siguiente material se incluyen varias fotografías de osciloscopio que ilustran diversos aspectos del rendimiento del amplificador. Se utilizó un solo LM301A en todos los circuitos de prueba. Por lo tanto, el rendimiento relativo refleja diferencias en compensación, carga y retroalimentación, pero no en las propiedades no compensadas del amplificador en sí. (El hecho de que este amplificador sobreviviera al abuso que recibió al ser transferido de un circuito de prueba a otro y durante las pruebas es un tributo a la durabilidad de los amplificadores operativos modernos de circuito integrado).
Compensación de un polo
El tipo más común de compensación para amplificadores de dos etapas implica el uso de un solo condensador entre los terminales de compensación. Dado que la admitancia de transferencia de cortocircuito de esta “red” es\(C_c s\) donde\(C_c\), es el valor del condensador compensador, la ecuación\(\ref{eq13.3.1}\) predice
\[a(s) \simeq \dfrac{K}{C_c s}\label{eq13.3.3} \]
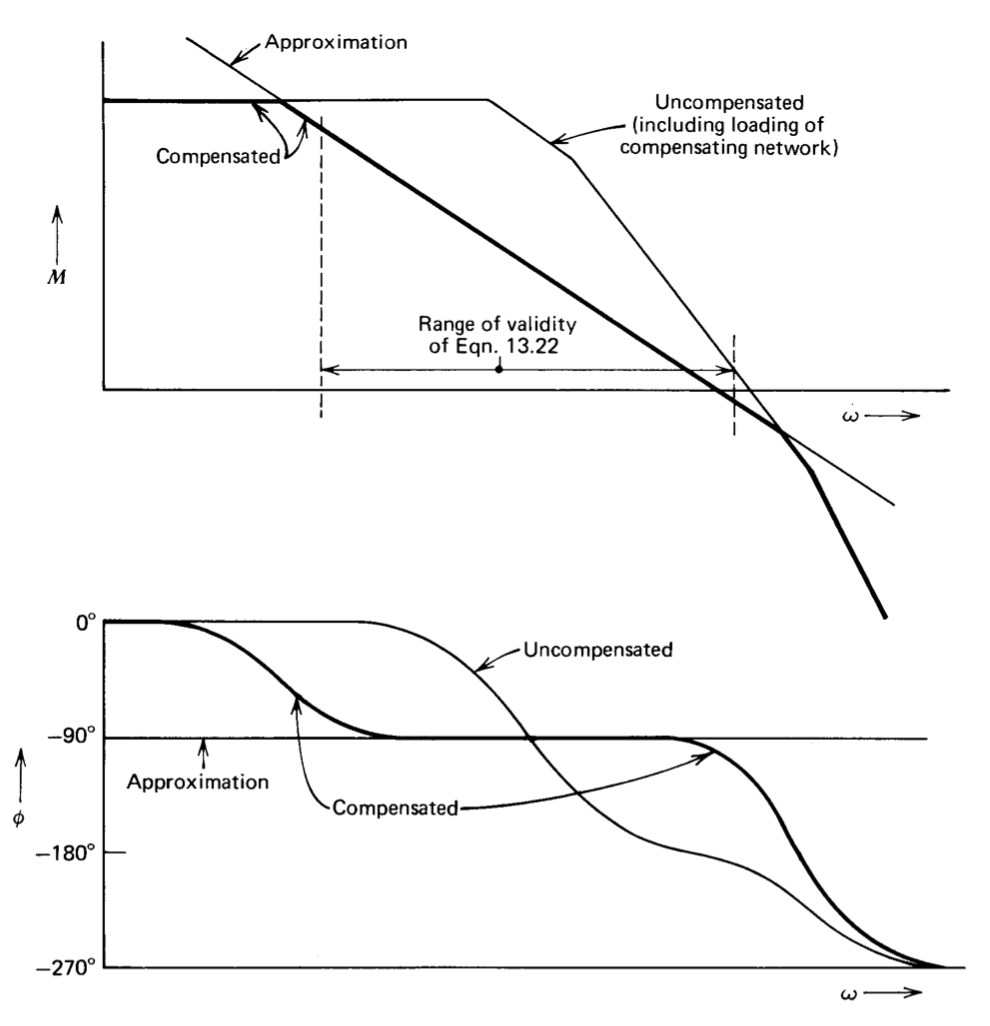
Figura 13.12 Función de transferencia de lazo abierto para compensación unipolar.
La aproximación de la Ecuación\(\ref{eq13.3.3}\) se representa en la Figura 13.12 junto con una función de transferencia de amplificador no compensada representativa. Como se explicó en la sección anterior, la función de transferencia de bucle abierto compensada es casi igual a la inferior de las dos curvas en todas las frecuencias.
La característica importante de la Figura 13.12, que indica la naturaleza de propósito general de este tipo de compensación unipolar, es que existe un amplio rango de frecuencias donde la magnitud de\(a(j\omega)\) es inversamente proporcional a la frecuencia y donde el ángulo de esta función de transferencia de bucle abierto es aproximadamente \(-90^{\circ}\). En consecuencia, el amplificador exhibe esencialmente una estabilidad idéntica (pero una velocidad de respuesta variable) para muchos valores diferentes de retroalimentación independiente de la frecuencia conectados a su alrededor.
Dos características adicionales de la función de transferencia de bucle abierto del amplificador también son evidentes a partir de la Figura 13.12. Primero, la aproximación de la Ecuación se\(\ref{eq13.3.3}\) puede extender a frecuencia cero si se conoce la ganancia d-c de bucle abierto del amplificador, ya que la geometría de la Figura 13.12 muestra que
\[a(s) \simeq \dfrac{a_0}{(a_0 C_c/K)s + 1} \nonumber \]
a frecuencias bajas e intermedias. En segundo lugar, si la frecuencia de ganancia unitaria del amplificador es lo suficientemente baja como para que las singularidades de orden superior no sean importantes, esta frecuencia está inversamente relacionada con\(C_c\) y es
\[\omega_u = \dfrac{K}{C_c} \nonumber \]
Los cálculos de estabilidad para las conexiones de retroalimentación que utilizan este tipo de amplificador se simplifican si reconocemos que siempre que la frecuencia de cruce de la combinación se encuentre en la región indicada, estos cálculos pueden basarse en la aproximación de\(\ref{eq13.3.3}\).
Varios amplificadores populares internamente compensados como el LM107 y los\(\mu A741\) combinan valores nominales de\(K\) de\(2 \times 10^{-4}\) mho con\(30-pF\) capacitores para\(C_c\). La frecuencia de ganancia unitaria resultante es\(6.7 \times 10^6\) radianes por segundo o aproximadamente 1 MHz. Este valor asegura estabilidad para cualquier red de realimentación resistiva conectada alrededor del amplificador, ya que, con este tipo de retroalimentación, el cruce siempre ocurre en frecuencias donde la transmisión en bucle está dominada por un polo.
La función aproximada de transferencia de bucle abierto para cualquiera de estos amplificadores compensados internamente es\(a(s) = 6.7 \times 10^6/s\). Esta función de transferencia, que es idéntica a la obtenida de un LM101A compensado con un\(30-pF\) condensador, puede ser óptima en aplicaciones que satisfacen las siguientes condiciones:
(a) La función de transferencia de red de retroalimentación desde la salida del amplificador a su entrada inversora tiene una magnitud de uno en la frecuencia de ganancia unitaria del amplificador.
(b) Cualquier dinámica asociada con la red de retroalimentación y la carga de salida contribuyen menos que el desplazamiento\(30^{\circ}\) de fase a la transmisión en bucle a la frecuencia de cruce.
c) Se requiere una respuesta transitoria moderadamente amortiguada.
(d) Las señales de entrada están relativamente libres de ruido.
Si no se satisfacen una o más de las condiciones anteriores, el rendimiento a menudo se puede mejorar mediante el uso de un amplificador compensado externamente que permita flexibilidad en la elección del valor del condensador de compensación. Considere, por ejemplo, una conexión de retroalimentación que se combina\(a(s)\) como se aproxima por Ecuación\(\ref{eq13.3.3}\) con retroalimentación independiente de la frecuencia\(f_0\). La función de transferencia de bucle cerrado para esta combinación es
\[A(s) = \dfrac{a(s)}{1 + a(s) f_0} = \dfrac{1}{f_0} \left [\dfrac{1}{(C_c/Kf_0)s + 1} \right ] \label{eq13.3.6} \]
La frecuencia de esquina de bucle cerrado (en radianes por segundo) es
\[\omega_h = \dfrac{Kf_0}{C_c} \nonumber \]
Esta ecuación muestra que el ancho de banda puede mantenerse en el valor máximo consistente con una estabilidad satisfactoria (recordar el desplazamiento de fase de términos ignorados en la aproximación de la Ecuación\(\ref{eq13.3.3}\)) si\(C_c\) se cambia con\(f_0\) para mantener constante la relación de estas dos cantidades. Alternativamente, se puede reducir el ancho de banda de bucle cerrado para proporcionar un filtrado mejorado para señales de entrada ruidosas al aumentar el tamaño del condensador de compensación. Un aumento similar en el tamaño del condensador también puede forzar el cruce a frecuencias más bajas para evitar que los polos asociados con la carga o una red de retroalimentación dependiente de la frecuencia deterioren la estabilidad.
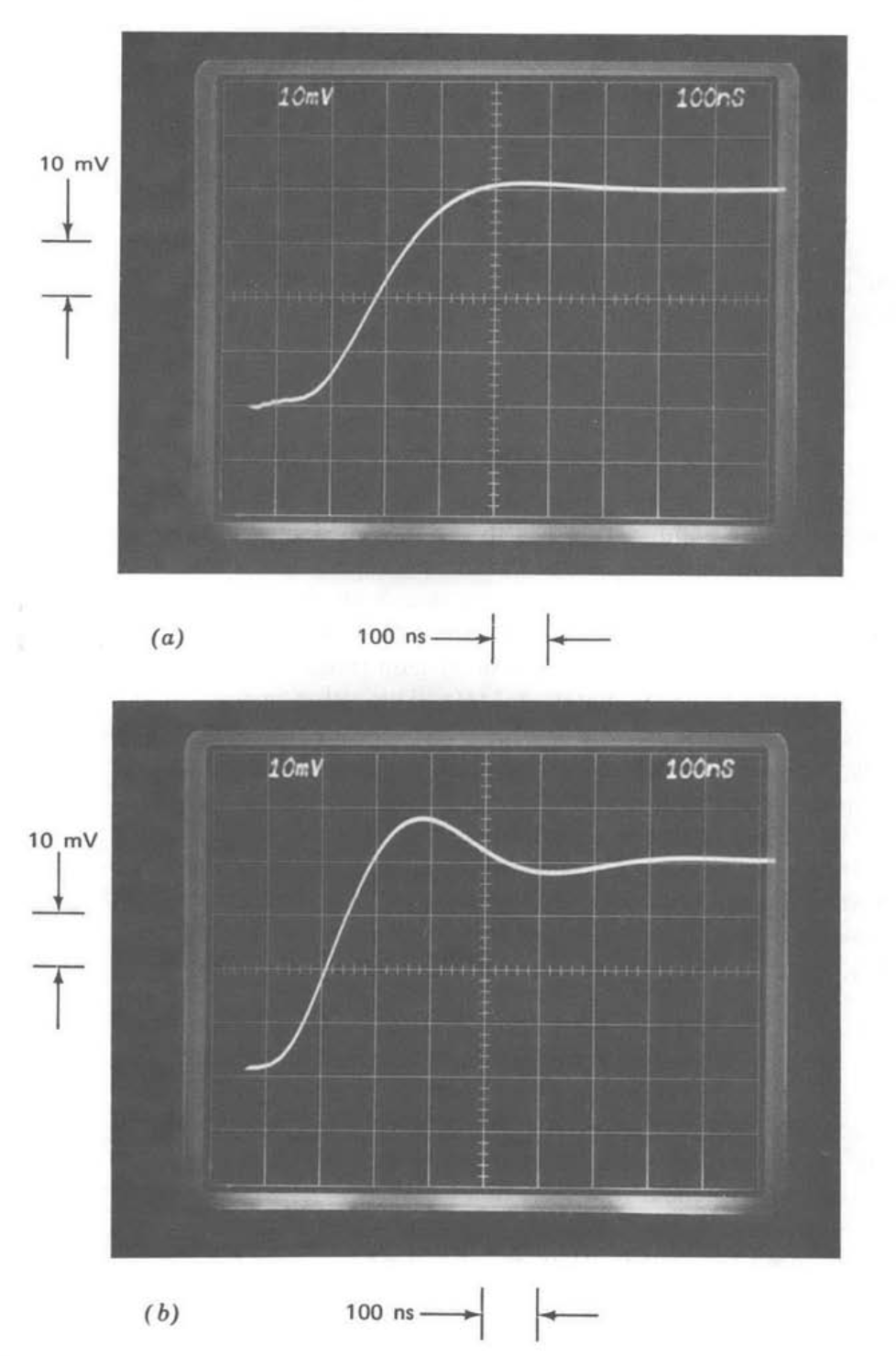
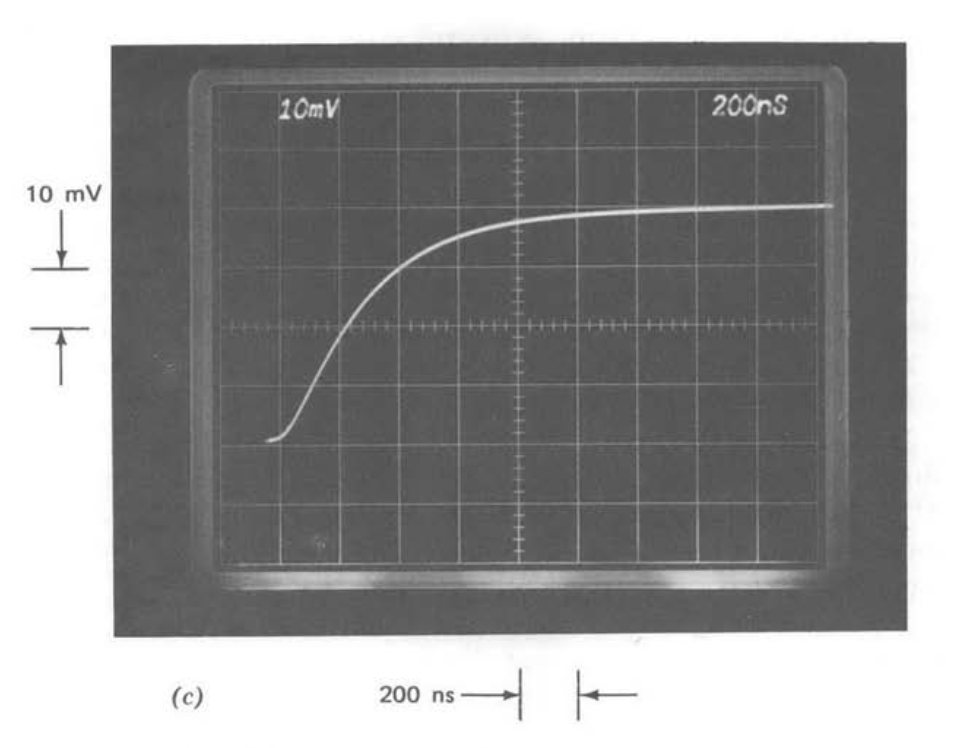
Figura 13.13 Respuesta escalonada del seguidor de ganancia unitaria en función del valor del condensador de compensación. (La amplitud de paso de entrada es\(40\ mV\). (\(a\))\(C_c = 30\ pF\). (\(b\))\(C_c = 18\ pF\). (\(c\))\(C_c = 68\ pF\).
La Figura 13.13 muestra las respuestas de paso de señal pequeña para el amplificador de prueba LM301A conectado como seguidor de ganancia de unidad (\(f_0 = 1\)). Parte a de esta figura
ilustra la respuesta con un condensador\(30-pF\) compensador, el valor utilizado en diseños similares, compensados internamente. Esta respuesta transitoria está bastante bien amortiguada, con un tiempo de subida de 10 a 90% de 220 ns, lo que implica un ancho de banda de bucle cerrado (de la Ecuación 3.5.7) de aproximadamente\(10^7\) radianes por segundo o 1.6 MHz. (Si la función de transferencia de bucle abierto del amplificador fuera exactamente de primer orden, la frecuencia de media potencia de bucle cerrado en esta conexión sería idéntica a la frecuencia de ganancia de unidad del amplificador mismo. Sin embargo, el cambio de fase de las singularidades de mayor frecuencia ignoradas en la aproximación unipolar introduce picos de bucle cerrado que extiende el ancho de banda de bucle cerrado).
La respuesta con un condensador\(18-pF\) compensador (Figura 13.13\(b\)) comercializa considerablemente mayor sobreimpulso para mejorar el tiempo de subida. Al comparar esta respuesta con las respuestas del sistema de segundo orden (Figura 3.8), se observa que
El transitorio de bucle cerrado es similar al de un sistema de segundo orden con 0.47 y\(\omega_n = 13.5 \times 10^6\) radianes por segundo. Dado que la función de transferencia de bucle abierto del amplificador satisface las condiciones utilizadas para desarrollar las curvas de la Figura 4.26, podemos usar estas curvas para aproximar las propiedades de transmisión de bucle. Figura Figura 4.26 a estima un margen de fase\(50^{\circ}\) y una frecuencia de cruce de\(11 \times 10^6\) radianes por segundo. Dado que el valor de\(f\) es uno en este sentido, estas cantidades corresponden a parámetros de bucle abierto compensados del propio amplificador.
La Figura 13.13\(c\) ilustra la respuesta escalonada con un condensador\(68-pF\) compensador. La respuesta es esencialmente de primer orden, lo que indica que el cruce ocurre ahora a una frecuencia en la que solo es importante el polo dominante introducido por compensación. La ecuación\(\ref{eq13.3.6}\) predice una constante de tiempo exponencial
\[\tau = \dfrac{C_c}{Kf_0} \label{eq13.3.8} \]
bajo estas condiciones. El tiempo de subida de cero a 63% mostrado en la Figura 13.12\(c\) es de aproximadamente 300 ns. Resolviendo ecuaciones\(\ref{eq13.3.8}\) para\(K\) usar rendimientos de valores de parámetros conocidos
\[K = \dfrac{C_c}{\tau f_0} = \dfrac{68\ pF}{300\ ns} = 2.3 \times 10^{-4} \text{ mho}\label{eq13.3.9} \]
Observamos que este valor para\(K\) es ligeramente superior al valor nominal de\(2 \times 10^{-4}\text{ mho}\), reflejando (además de posibles errores experimentales) una corriente quiescente algo mayor que la nominal de primera etapa para este amplificador en particular. (La corriente de primera etapa en reposo de este amplificador se puede medir directamente conectando un amperímetro desde los terminales 1 y 5 a la fuente negativa (ver Figura 10.19). El valor estimado de\(K\) está en excelente acuerdo con la corriente de reposo total medida (la suma de ambos lados)\(24\mu A\) para el amplificador de prueba.) Variaciones de hasta 50% del valor nominal para no\(K\) son inusuales como consecuencia de incertidumbres en el proceso de circuito integrado.
Figura 13.14 Amplificador no inversor.
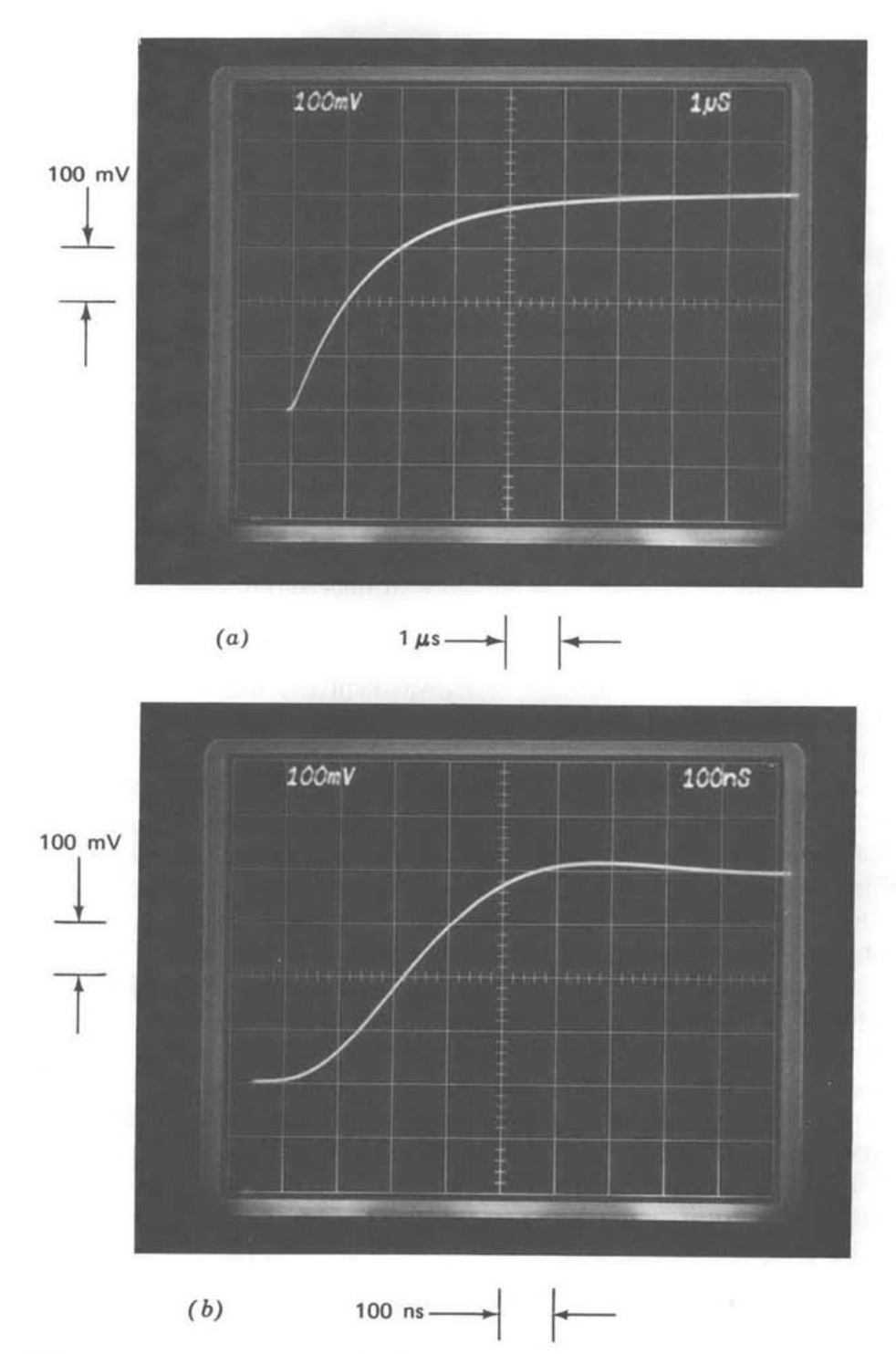
El amplificador se conectó a continuación en la configuración no inversora que se muestra en la Figura 13.14. El valor de\(R_1\) se mantuvo menor o igual a\(1\ k\Omega\) en todas las conexiones para minimizar los efectos de carga de la capacitancia de entrada del amplificador. La Figura 13.15\(a\) muestra la respuesta escalonada para una conexión de ganancia de diez (\(R_1 = 1\ k\Omega, R_2 = 9\ k\Omega\)) con\(C_c = 30\ pF\). El tiempo de aumento de 10 a 90% ha aumentado significativamente en comparación con el caso de unidad-ganancia usando compensación idéntica. Este cambio se espera debido al cambio en fo (ver Ecuación\(\ref{eq13.3.6}\)).
La Figura 13.15\(b\) es la respuesta escalonada cuando se baja el valor del condensador para obtener un sobreimpulso aproximadamente igual al mostrado en la Figura 13.13\(a\). Si bien este cambio no devuelve el tiempo de subida exactamente al mismo valor mostrado en la Figura 13.13\(a\), la velocidad se mejora drásticamente en comparación con el transitorio mostrado en la Figura 13.15\(a\). (Obsérvese la diferencia en escalas de tiempo.)
Nuestras relaciones aproximadas predicen que los efectos de cambiar fo de 1 a 0.1 podrían compensarse completamente bajando el condensador de compensación de\(30\ pF\) a\(3\ pF\). El valor real del condensador requerido para obtener la respuesta mostrada en la Figura 13.15\(b\) fue aproximadamente\(4.5\ pF\). Al menos dos efectos contribuyen a la discrepancia. Primero, la aproximación ignora los polos de bucle abierto de mayor frecuencia, lo que debe ser un factor si hay algún sobreimpulso en la respuesta escalonada. Segundo, en realidad hay alguna retroalimentación capacitiva positiva de bucle menor en el amplificador. El diagrama esquemático para el LM101A (Figura 10.19) muestra que la etapa de entrada del amplificador se carga con un repetidor de corriente. La compensación habitual de bucle menor está conectada al lado de salida de este repetidor de corriente. Sin embargo, el lado de entrada del
repetidor también se lleva a cabo en un pin para ser utilizado para equilibrar el amplificador. Cualquier capacitancia entre una parte del circuito que sigue a la etapa de alta ganancia y el lado de entrada del repetidor de corriente proporciona retroalimentación positiva de bucle menor debido a la inversión del repetidor de corriente. Existe una excelente trayectoria de capacitancia de stray-capacitancia entre la salida del amplificador (pin 6) y el terminal de equilibrio conectado al lado de entrada del repetidor de corriente (pin 5). (Una sabia precaución que reduce este efecto es cortar el pin 5 cerca de la lata cuando el amplificador se usa en conexiones que no requieren equilibrio. Esta modificación no se realizó al amplificador de demostración con el fin de retener la máxima flexibilidad. Incluso con el pin 5 cortado cerca de la lata, hay algo de capacitancia de cabecera entre este y el pin 6.) Parte de la capacitancia compensadora normal se “pierde” cancelando esta capacitancia de retroalimentación positiva.
La conclusión importante a extraer de la Figura 13.15 es que, al seleccionar adecuadamente el valor del condensador de compensación, el tiempo de subida y ancho de banda del amplificador de ganancia de diez se puede mejorar en aproximadamente un factor de 10 en comparación con el valor que se obtendría de un amplificador con compensación fija. Además, se puede mantener una estabilidad razonable con un rendimiento más rápido.
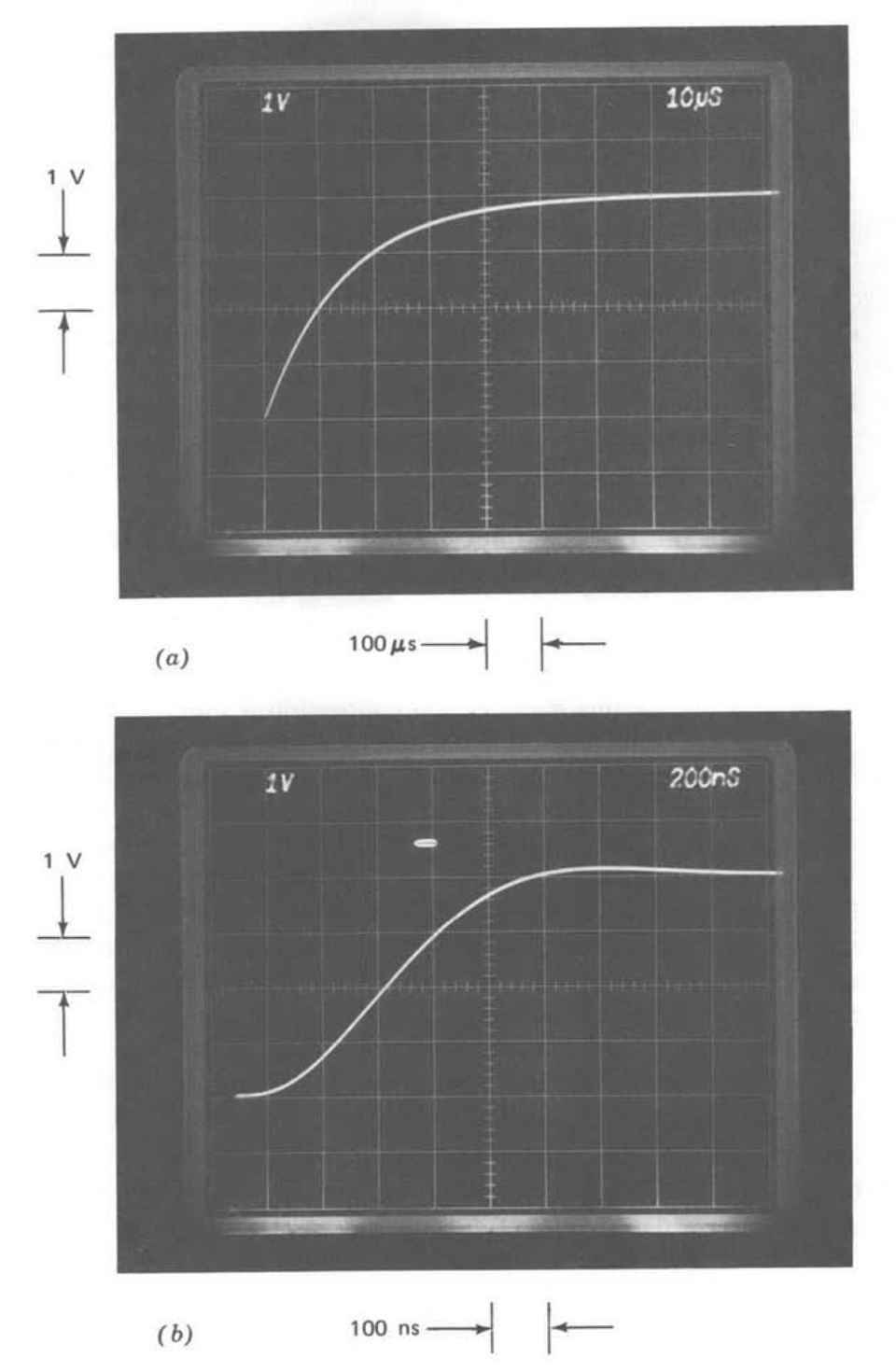
Figura 13.16 Respuestas escalonadas del amplificador no inversor de ganancia de 100. (La amplitud del paso de entrada es\(40\ mV\).) (\(a\))\(C_c = 30\ pF\). (\(b\))\(C_c = 1\ pF\).
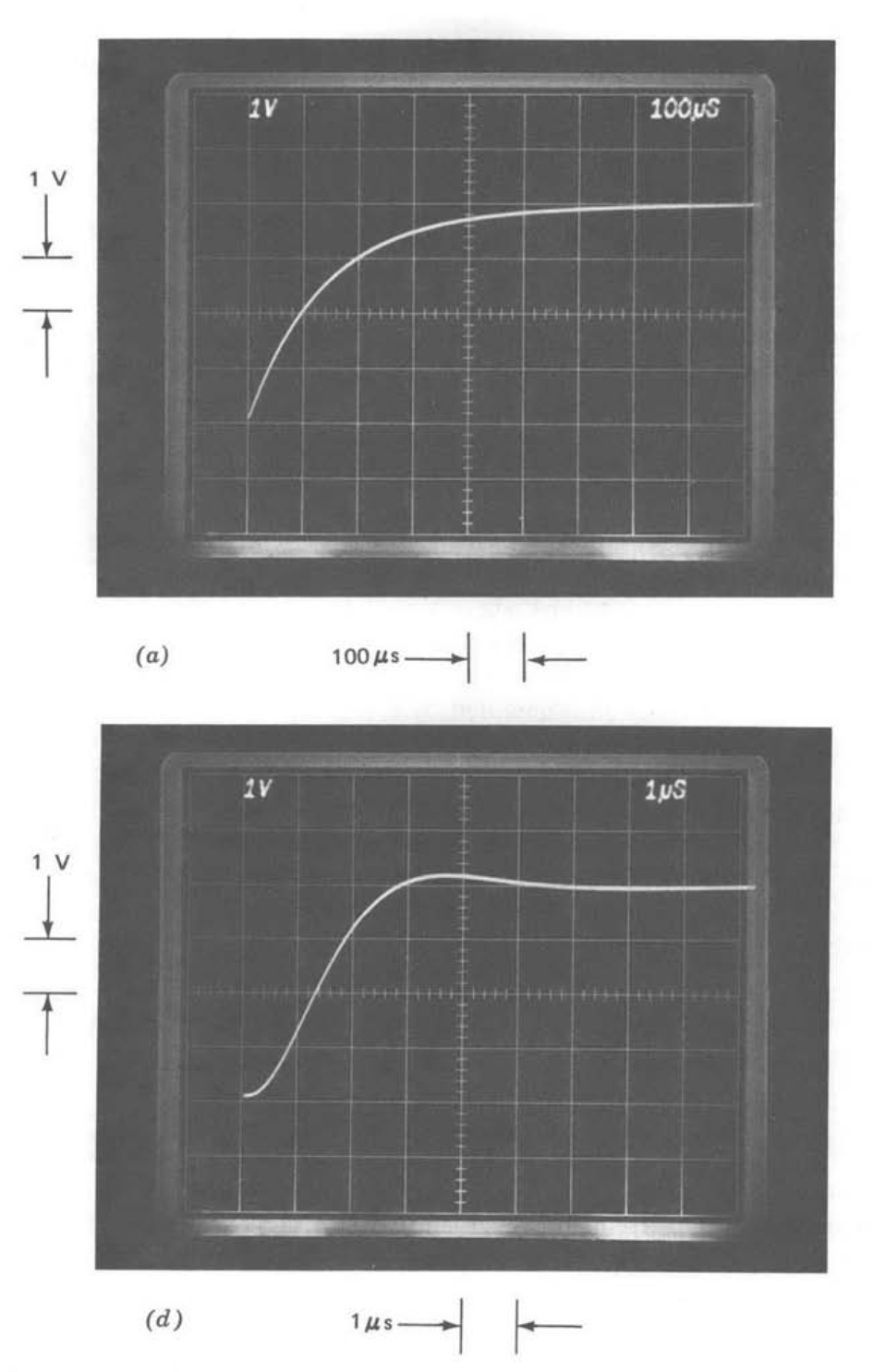
Figura 13.17 Respuestas escalonadas del amplificador no inversor de ganancia de 1000. (La amplitud del paso de entrada es\(4\ mV\).) (\(a\))\(C_c = 30\ pF\). (\(b\)) Muy pequeño\(C_c\).
Las figuras 13.16 y 13.17 continúan este tema para conexiones de ganancia de 100 (\(R_1 = 100\ \Omega, R_2 = 10\ k\Omega\)) y ganancia de 1000 (\(R_1 = 10\ \Omega, R_2 = 10\ k\Omega\)), respectivamente. El tiempo de subida para la\(30-pF\) compensación está linealmente relacionado con la ganancia, y tiene un valor de 10 a 90% de aproximadamente 350 microsegundos en la Figura 13.17\(a\), lo que implica un ancho de banda de bucle cerrado de 1 kHz para un amplificador compensado internamente en esta conexión de ganancia de 1000. Los valores de factor de compensación\(1\ pF\) para el amplificador de ganancia de 100 y solo un pellizco (obtenidos con dos cables cortos y paralelos espaciados para la respuesta transitoria deseada) para la conexión de ganancia de 1000 dan como resultado un sobreimpulso comparable al del seguidor de ganancia de unidad compensado con\(30\ pF\). El tiempo de subida aumenta ligeramente a mayores ganancias reflejando el hecho de que la ganancia de bucle abierto de alta frecuencia del amplificador no compensada es limitada. Sin embargo, se obtiene un tiempo de subida de aproximadamente 2 us en la conexión de ganancia de 1000. El ancho de banda de bucle cerrado correspondiente de 175 kHz representa una mejora de casi 200:1 en comparación con el valor esperado de un amplificador de propósito general compensado internamente.
Es interesante observar que el ancho de banda de bucle cerrado obtenido al compensar adecuadamente el económico LM301A en la conexión de ganancia de 1000 se compara favorablemente con el posible de los mejores amplificadores operativos de compensación fija de componentes discretos disponibles. Las frecuencias de ganancia unitaria para unidades discretas de banda ancha rara vez superan los 100 MHz; en consecuencia, estos amplificadores unipolares tienen anchos de banda de bucle cerrado de 100 kHz o menos en la conexión de ganancia de 1000. La ventaja de ancho de banda en comparación con los amplificadores de circuito integrado compensados internamente de banda ancha como el LM 118 es aún más impresionante.
Debemos darnos cuenta de que obtener un rendimiento como el que se muestra en la Figura 13.17\(b\) requiere un ajuste cuidadoso del valor del condensador compensador porque el valor óptimo depende de las características del amplificador particular utilizado y de la capacitancia parásita. Aunque este proceso es difícil en una situación de producción de alto volumen, es posible y, cuando se consideran todos los costos, puede seguir siendo la forma menos costosa de obtener un circuito de ancho de banda amplio de alta ganancia. Además, la compensación se vuelve rutinaria si es aceptable alguna disminución en el ancho de banda por debajo del valor máximo posible.
Compensación de dos polos
La compensación unipolar descrita anteriormente es una compensación conservadora de propósito general que se usa ampliamente en una variedad de aplicaciones. Sin embargo, hay muchas aplicaciones en las que es ventajosa una mayor desensitividad a frecuencias intermedias que la proporcionada por la magnitud de un polo frente a las características de frecuencia. Aumentar la magnitud de frecuencia intermedia de una transmisión en bucle dominada por un solo polo requiere un aumento correspondiente en la frecuencia de cruce. Este enfoque se excluye en sistemas donde el desplazamiento de fase irreducible restringe la frecuencia de cruce máxima para un funcionamiento estable.
La única manera de mejorar la desensitividad de frecuencia intermedia sin aumentar la frecuencia de cruce es usar un rolloff de transmisión de bucle de orden superior a frecuencias por debajo del cruce. Por ejemplo, considere las dos funciones de transferencia de bucle abierto del amplificador
\[a(s) = \dfrac{10^5}{10^{-2} s + 1}\label{eq13.3.10} \]
y
\[a'(s) = \dfrac{10^5 (10^{-6} s + 1)}{(10^{-4} s + 1)^2}\label{eq13.3.11} \]
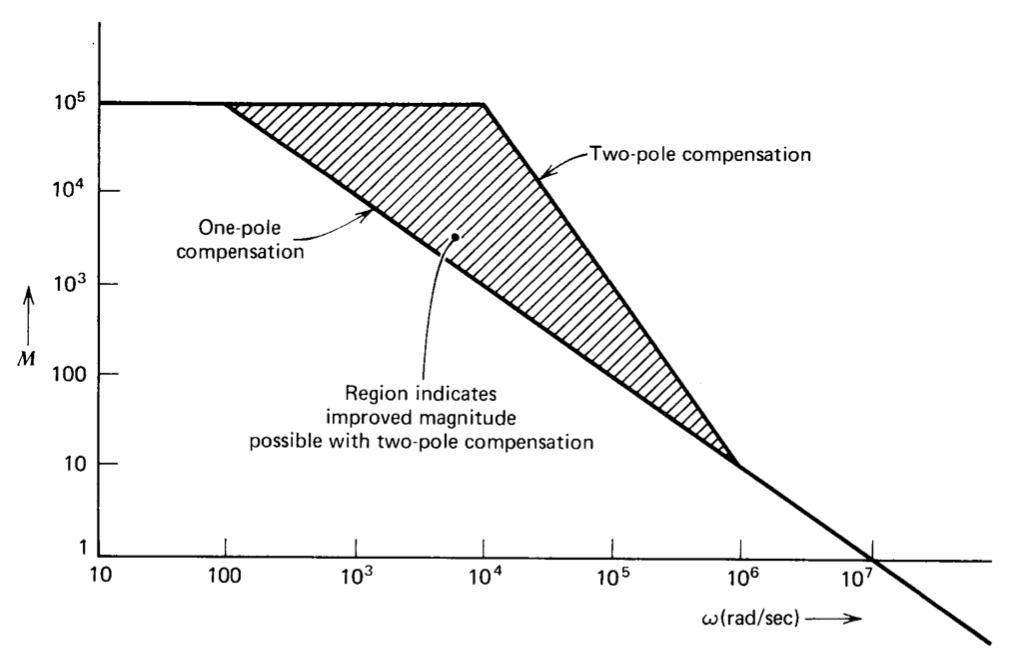
Figura 13.18 Comparación de magnitudes de funciones de transferencia de bucle abierto de uno y dos polos.
Las características de magnitud versus frecuencia de estas dos funciones de transferencia se comparan en la Figura 13.18.
Ambas funciones de transferencia tienen frecuencias de unidad-ganancia de\(10^7\) radianes por segundo y magnitudes d-c de 105. Sin embargo, la magnitud de\(a'(j\omega )\) supera la de\(a(j\omega )\) en todas las frecuencias entre 100 radianes por segundo y\(10^6\) radianes por segundo. La ventaja alcanza un factor de 100 a\(10^4\) radianes por segundo.
La misma ventaja se puede demostrar usando coeficientes de error. Si los amplificadores con funciones de transferencia de bucle abierto dadas por Ecuaciones\(\ref{eq13.3.10}\) y\(\ref{eq13.3.11}\) están conectados como seguidores de ganancia unitaria, las ganancias de bucle cerrado respectivas son
\[A(s) = \dfrac{a(s)}{1 + a(s)} = \dfrac{10^5}{10^{-2}s + 1 + 10^5} \nonumber \]
y
\[A'(s) = \dfrac{a'(s)}{1 + a'(s)} = \dfrac{10^5 (10^{-6} s + 1)}{(10^{-4} s + 1)^2 + 10^5 (10^{-6} s + 1)} \nonumber \]
Las series de errores correspondientes son
\[1 - A(s) \simeq \dfrac{10^{-2} s + 1}{10^{-2} s + 10^5} = 10^{-5} + 10^{-7} s - \cdots + \nonumber \]
y
\[1 - A'(s) \simeq \dfrac{10^{-8} s^2 + 2 \times 10^{-4} s + 1}{10^{-8} s^2 + 0.1 s + 10^5} = 10^{-5} + 2 \times 10^{-9} s + \cdots + \nonumber \]
La identificación de coeficientes de error muestra que si bien estos dos sistemas tienen valores idénticos para\(e_0\), el coeficiente de error ei es un factor de 50 veces menor para el sistema con el rolloff bipolar. Por lo tanto, se producen errores dramáticamente más pequeños con el sistema bipolar para las señales de entrada que hacen que el\(e_1\) término de la serie de errores domine.
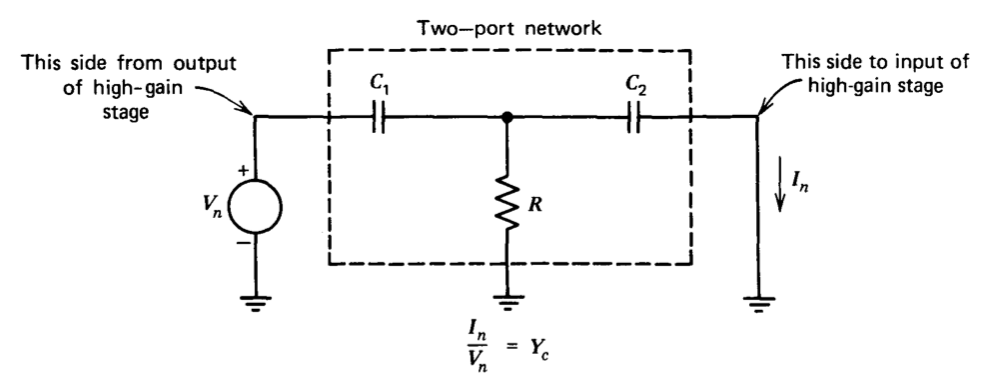
Figura 13.19 Red para compensación bipolar.
Es necesario utilizar una verdadera red de dos puertos para implementar esta compensación, ya que la\(s^2\) dependencia requerida de\(Y_c\) no se puede obtener con una red de dos terminales. La admisión de transferencia de cortocircuito del trabajo neto que se muestra en la Figura 13.19,
\[\dfrac{I_n (s)}{V_n (s)} = \dfrac{RC_1 C_2 s^2}{R(C_1 + C_2)s + 1} \nonumber \]
tiene la forma requerida. La función aproximada de transferencia de bucle abierto con este tipo de red de compensación es (de la ecuación\(\ref{eq13.3.1}\))
\[a(s) \simeq \dfrac{K}{Y_c} \simeq \dfrac{K'(\tau s + 1)}{s^2} \label{eq13.3.17} \]
dónde\(\tau = R(C_1 + C_2)\) y\(K' = K/RC_1C_2\).
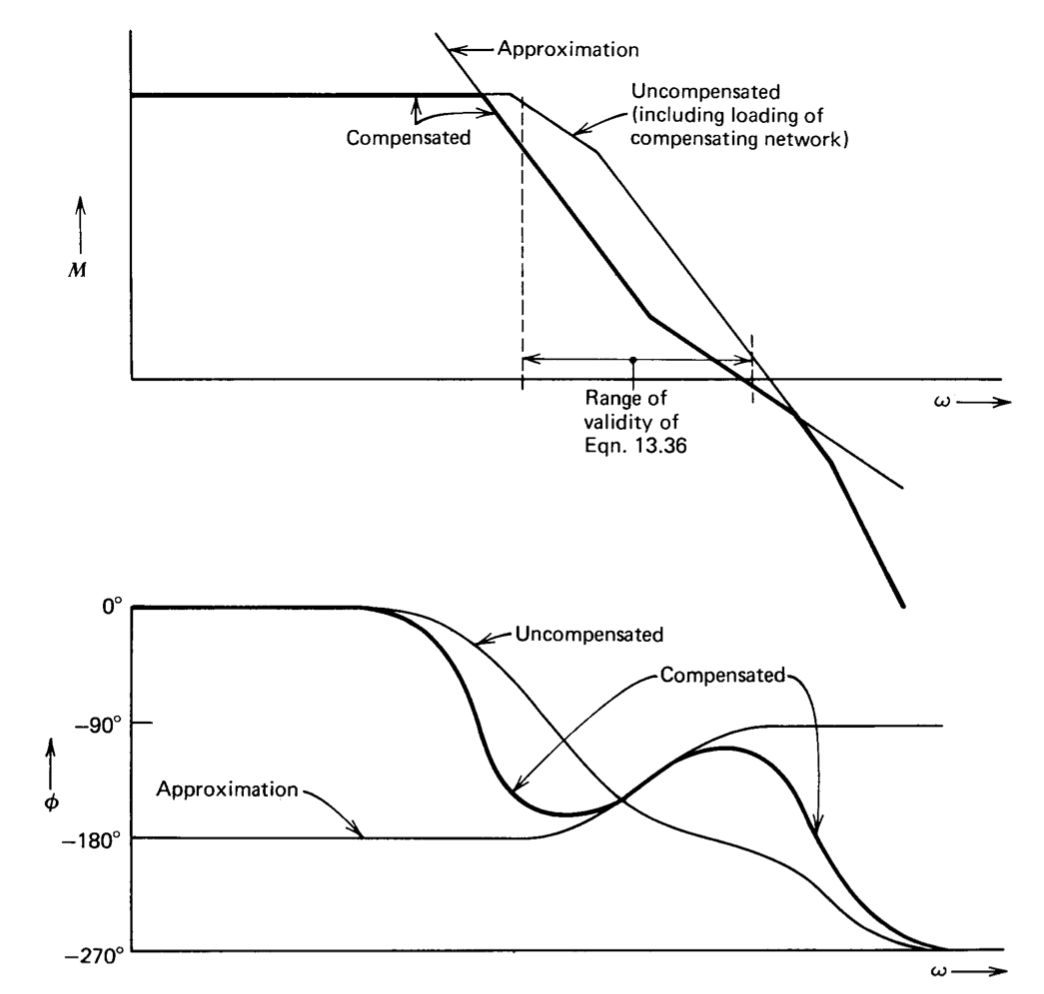
Figura 13.20 Función de transferencia de lazo abierto para compensación bipolar.
En la Figura 13.20 se muestra una estimación de la función de transferencia de bucle abierto completa basada en la ecuación\(\ref{eq13.3.17}\) y una función de transferencia no compensada representativa. Observamos que si bien este tipo de función de transferencia puede producir una desensitividad significativamente mejorada y una magnitud de coeficiente de error en comparación con una función de transferencia unipolar, no es una compensación de propósito general. La ubicación cero y la constante\(K'\) deben elegirse cuidadosamente en función de la atenuación proporcionada por la red de retroalimentación en una aplicación particular para obtener un margen de fase satisfactorio. Si bien la disminución de la frecuencia del cero da como resultado un rango de frecuencia más amplio de margen de fase aceptable, también reduce la desensitividad, y en el límite conduce a una función de transferencia unipolar. Este tipo de función de transferencia de bucle abierto también es intolerante a un polo adicional introducido en la red de retroalimentación o por carga capacitiva. Si el polo adicional se encuentra a una frecuencia intermedia por debajo de la ubicación cero, resulta inestabilidad. Otro problema es que
existe un amplio rango de frecuencias donde el desplazamiento de fase de la función de transferencia es cercano a - 1800. Si bien esta función de transferencia no es condicionalmente estable por la definición dada en la Sección 6.3.4, el pequeño margen de fase que resulta cuando la frecuencia de cruce es bajada (en un sentido de función de descripción) por saturación conduce a un rendimiento marginal después de la sobrecarga.
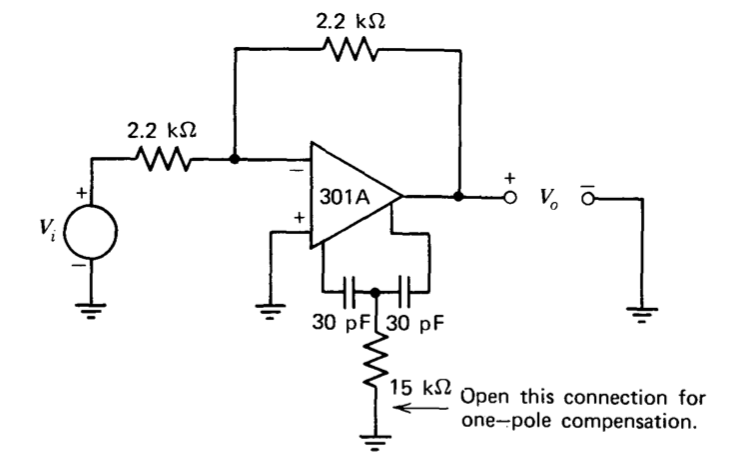
Figura 13.21 Inversor de ganancia unitaria con compensación bipolar.
A pesar de sus limitaciones, la compensación bipolar es una técnica poderosa para aplicaciones donde los niveles de señal y la dinámica de elementos adicionales en el bucle son bien conocidos. Este tipo de compensación se demuestra utilizando el inversor de unidad-ganancia que se muestra en la Figura 13.21. Las resistencias de red de retroalimentación relativamente bajas se eligen para reducir los efectos de la capacitancia en la entrada inversora del amplificador. Esta precaución es particularmente importante ya que el voltaje en este terminal de entrada se muestra en varias de las fotografías del osciloscopio a seguir. Se utilizó un seguidor de voltaje LM310 (ver Sección 10.4.4) para aislar este nodo de la capacitancia de entrada del osciloscopio relativamente alta para estas pruebas. La capacitancia de entrada del LM310 es considerablemente menor que la de una sonda de osciloscopio pasivo de ganancia unitaria, y su ancho de banda excede el necesario para mantener la fidelidad de la señal de interés.
La función aproximada de transferencia de bucle abierto para el amplificador con valores de red de compensación como se muestra en la Figura 13.21 es (de la ecuación\(\ref{eq13.3.17}\) usando el valor previamente determinado de\(K = 2.3 \times 10^{-4}\) mho)
\[a(s) \simeq \dfrac{1.7 \times 10^{13} (9\times 10^{-7} s + 1)}{s^2}\label{eq13.3.18} \]
Dado que el valor de\(f_0\) para el inversor de ganancia unitaria es 1/2, la transmisión de bucle aproximada para este sistema es
\[L(s) \simeq - \dfrac{0.85 \times 10^{13} (9 \times 10^{-7} s + 1)}{s^2}\label{eq13.3.19} \]
La frecuencia de cruce predicha por la ecuación\(\ref{eq13.3.19}\) es\(7.7 \times 10^6\) radianes por segundo, y el cero se ubica en\(1.1 \times 10^6\) radianes por segundo, o un factor de 7 por debajo de la frecuencia de cruce. En consecuencia, el margen de fase de este sistema es\(\tan^{-1} (1/7) = 8^{\circ}\) menor que el de un inversor de ganancia unitaria utilizando compensación unipolar ajustada para la misma frecuencia de cruce.
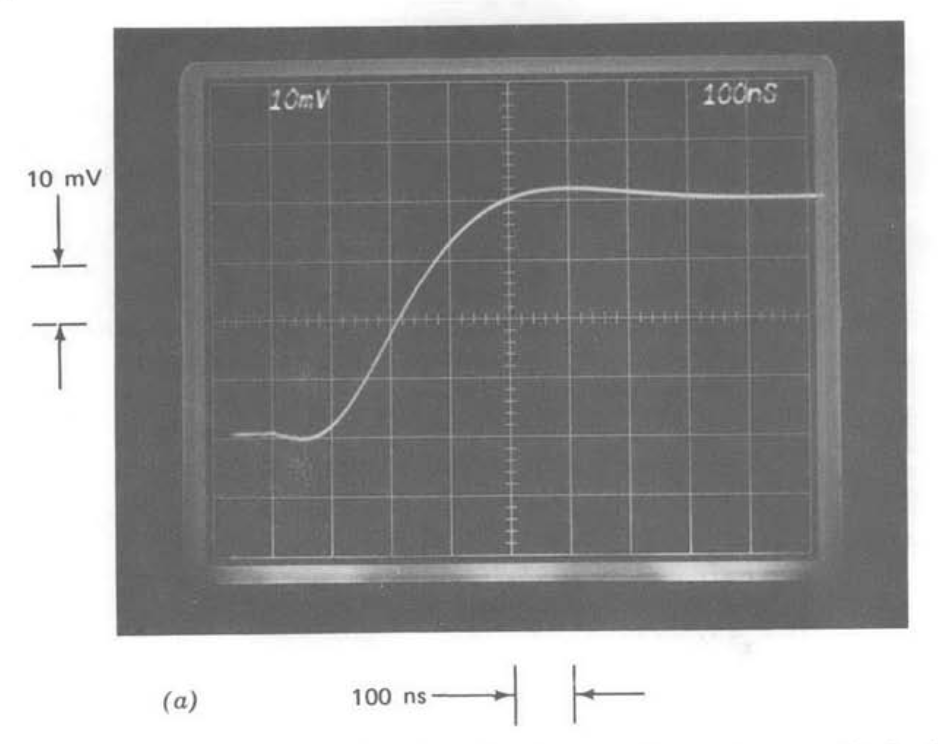
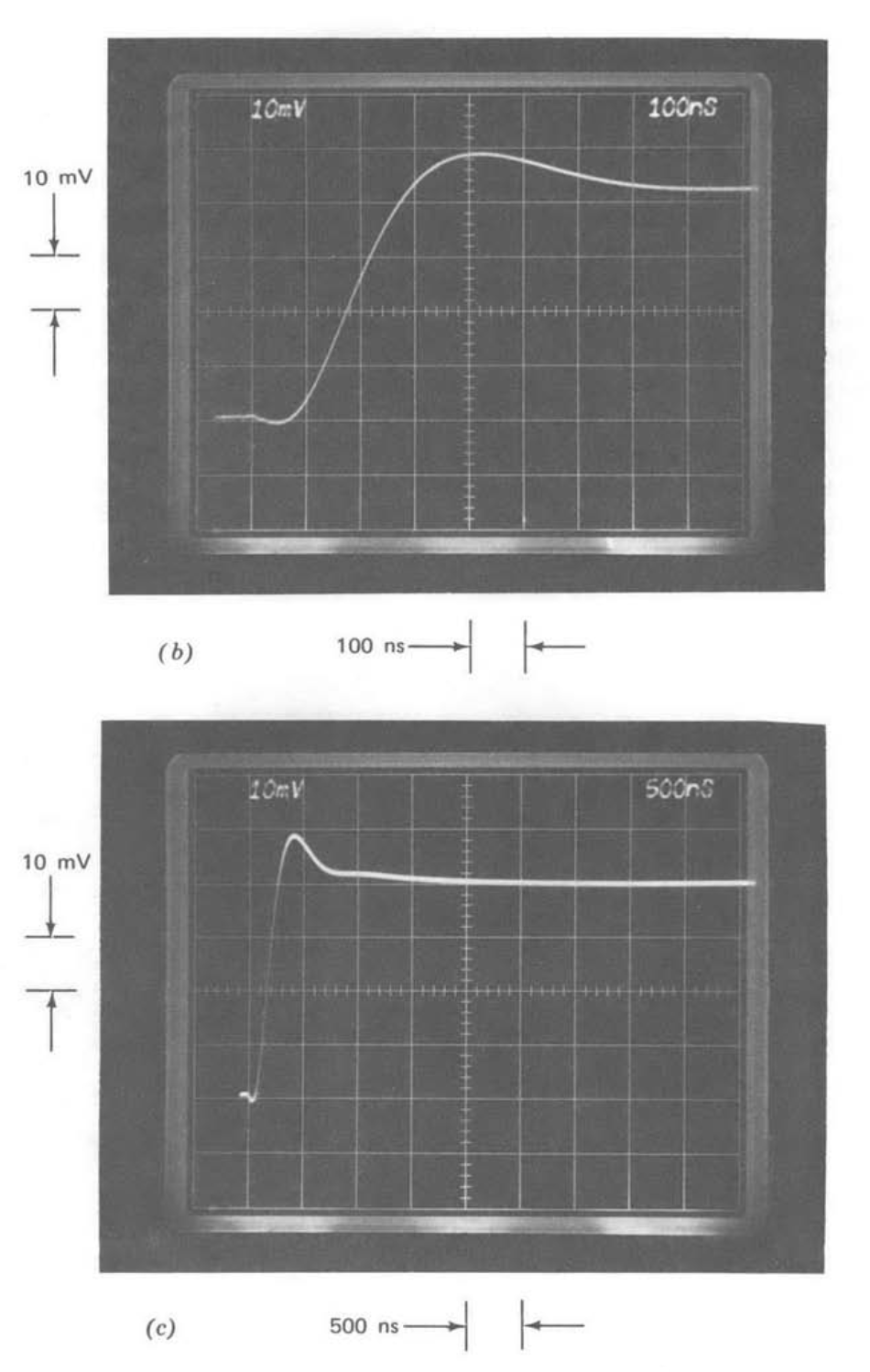
Figura 13.22 Respuestas escalonadas del inversor de unidad-ganancia. (La amplitud del paso de entrada es\(-40\ mV\).) (\(a\)) Compensación unipolar. (\(b\)) Compensación bipolar. (\(c\)) Repetición de pieza\(b\) con velocidad de barrido más lenta.
La Figura 13.22 compara las respuestas escalonadas del LM301A conectado al inversor con compensación de uno y dos polos. La parte a de esta cifra se obtuvo con el extremo inferior de la\(15-k\Omega\) resistencia retirado de tierra como se indica en la Figura 13.21. En este caso el elemento compensador es equivalente a un solo\(15-pF\) condensador. Tenga en cuenta que la ecuación\(\ref{eq13.3.3}\) combinada con el valor\(f_0 = 1/2\), que se aplica al inversor de ganancia unitaria, predice una frecuencia de cruce\(7.7 \times 10^6\) -radian-por-segundo para la\(15-pF\) compensación. El mismo resultado se puede obtener al darse cuenta de que a frecuencias más allá de la ubicación cero, la impedancia paralela de los condensadores en la red de compensación de dos polos debe ser menor que la de la resistencia, y así eliminar la resistencia no altera sustancialmente la función de transferencia de bucle abierto del amplificador en las inmediaciones de crossover.
La respuesta mostrada en la Figura 13.22\(a\) es bastante similar a la mostrada anteriormente en la Figura 13.13\(a\). Recordemos que la Figura 13.13\(a\) se obtuvo con un seguidor de unidad-ganancia (\(f_0 = 1\)) y\(C_c = 30\ pF\). Como se anticipó, la disminución\(f_0\) y\(C_c\) por el mismo factor da como resultado un rendimiento comparable para los sistemas unipolares.
Hay una pequeña cantidad de subbrote inicial evidente en el transitorio de la Figura 13.22\(a\). Este subimpulso es el resultado de que el paso de entrada se alimenta directamente a la salida a través de las dos resistencias conectadas en serie. Esta señal de alimentación directa puede impulsar la salida negativa inicialmente debido a la impedancia de salida distinta de cero y el tiempo de respuesta del amplificador. La magnitud del subimpulso inicial se reduciría si se utilizaran resistencias de mayor valor alrededor del amplificador.
La respuesta escalonada de la Figura 13.22\(b\) resulta con la\(15-k\Omega\) resistencia conectada a tierra y es la respuesta para la compensación bipolar. Tres efectos se combinan para acelerar el tiempo de subida y aumentar el sobreimpulso de esta respuesta en comparación con el caso unipolar. Primero, el margen de fase es aproximadamente 80 menos para el sistema bipolar. En segundo lugar, la\(T\) red utilizada para la compensación bipolar carga la salida de la segunda etapa del amplificador en mayor medida que el condensador único utilizado para la compensación unipolar, aunque este efecto es pequeño para los valores de elementos utilizados en el presente ejemplo. La carga adicional desplaza los polos de alta frecuencia asociados con una transmisión limitada de bucle menor hacia frecuencias más bajas. En tercer lugar, un cero de bucle cerrado que resulta con compensación de dos polos también influye en la respuesta del sistema.
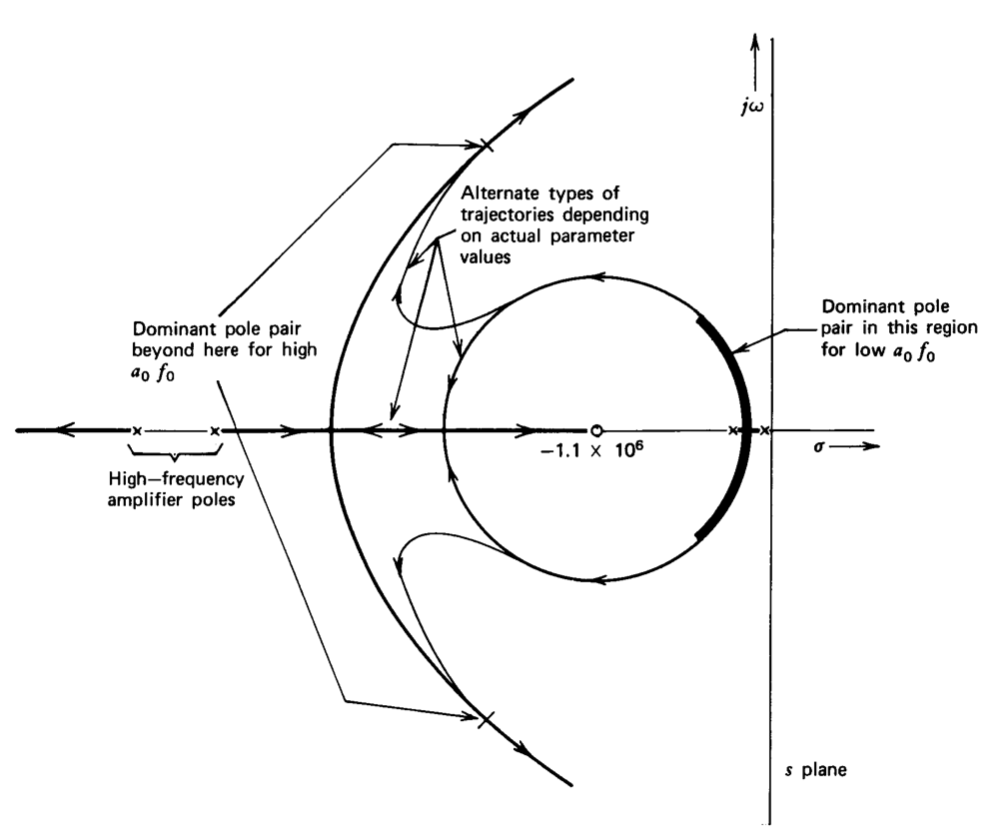
Figura 13.23 Diagrama de locus raíz para inversor con compensación bipolar.
El diagrama raíz-locus mostrado en la Figura 13.23 aclara la tercera razón. (Tenga en cuenta que este diagrama no se basa en la aproximación de la ecuación\(\ref{eq13.3.19}\), sino más bien en una transmisión de bucle más completa asumiendo un amplificador representativo usando estos valores de red de compensación). Con el valor de\(a_0f_0\) utilizado para obtener la Figura 13.22\(b\), un polo de bucle cerrado está bastante cerca del cero en\(- 1.1 \times 10^6\text{ sec}^{-1}\) independientemente de los detalles exactos del diagrama. Dado que el cero está en la ruta de avance del sistema, aparece en la función de transferencia de bucle cerrado. El doblete de bucle cerrado resultante agrega una “cola” positiva de larga duración a la respuesta como se explica en la Sección 5.2.6. La cola es claramente evidente en la Figura 13.22\(c\), una repetición de parte\(b\) fotografiada con una velocidad de barrido más lenta. La constante de tiempo de la cola es consistente con la ubicación del doblete aproximadamente\(- 10^6\text{ sec}^{-1}\).
Recordamos que este tipo de cola es característico de los sistemas con retraso compensado. La transmisión en bucle del sistema bipolar combina una\(1/s^2\) región larga con un cero por debajo de la frecuencia de cruce. Este mismo tipo básico de transmisión en bucle da como resultado una compensación de retraso.
El diagrama raíz-locus también muestra que la relación de amortiguación satisfactoria se obtiene solo en un rango relativamente pequeño de\(a_0f_0\). Al\(a_0f_0\) caer por debajo del rango óptimo, el rendimiento del sistema está dominado por un par de polos de baja frecuencia mal amortiguado como se indica en la Figura 13.23. A medida\(a_0f_0\) que se incrementa por encima del rango óptimo, un par de polos mal amortiguado de mayor frecuencia domina el rendimiento ya que el polo del eje real más cercano al origen está casi cancelado por el cero.
El potencial de reducción de errores de la compensación bipolar se ilustra en la Figura 13.24. La cantidad más importante incluida en estas fotografías es la señal en la entrada inversora del amplificador operacional. La topología utilizada (Figura 13.21) muestra que la señal en este terminal es (en ausencia de carga) la mitad del error entre la salida real y la ideal del amplificador.
La parte a de esta figura indica el rendimiento con compensación unipolar lograda a través de un\(15-pF\) condensador. La traza superior indica la salida.amplificador cuando la señal aplicada desde la fuente es una onda triangular de pico a pico de 20 voltios y 10 kHz. Esta señal es, a dentro de la resolución de la medición, el negativo de la señal aplicada por la fuente. La traza inferior es la señal en el terminal de entrada inversora del amplificador operacional.
La función aproximada de transferencia de bucle abierto desde la entrada inversora a la salida del amplificador de prueba es
\[-a(s) = -\dfrac{2.3 \times 10^{-3}}{1.5 \times 10^{-11} s} = -\dfrac{1.5 \times 10^7}{s}\label{eq13.3.20} \]
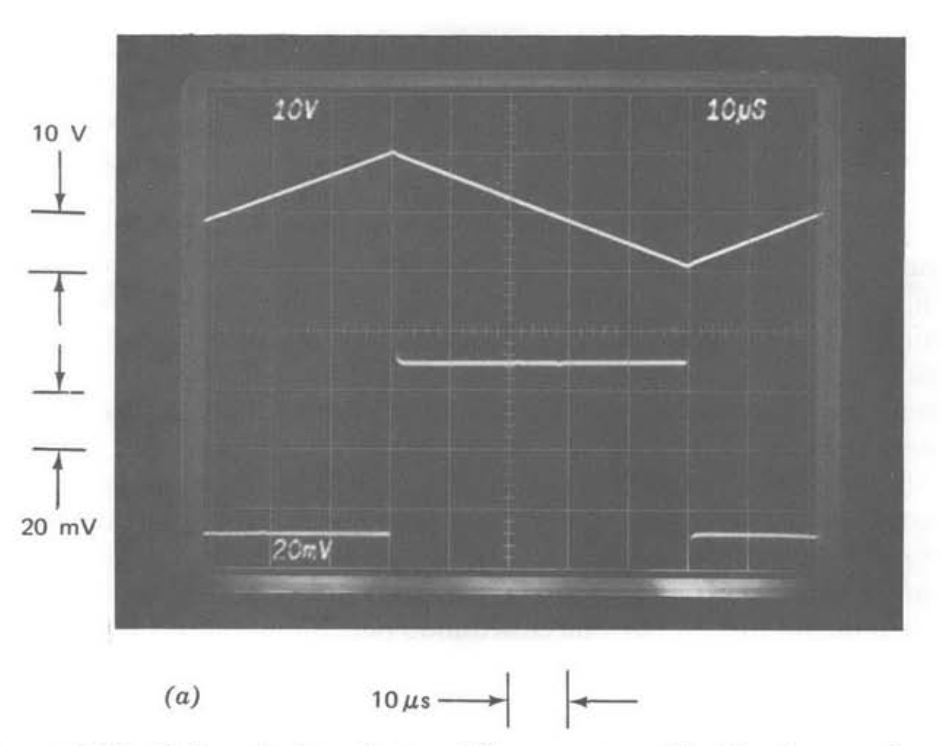
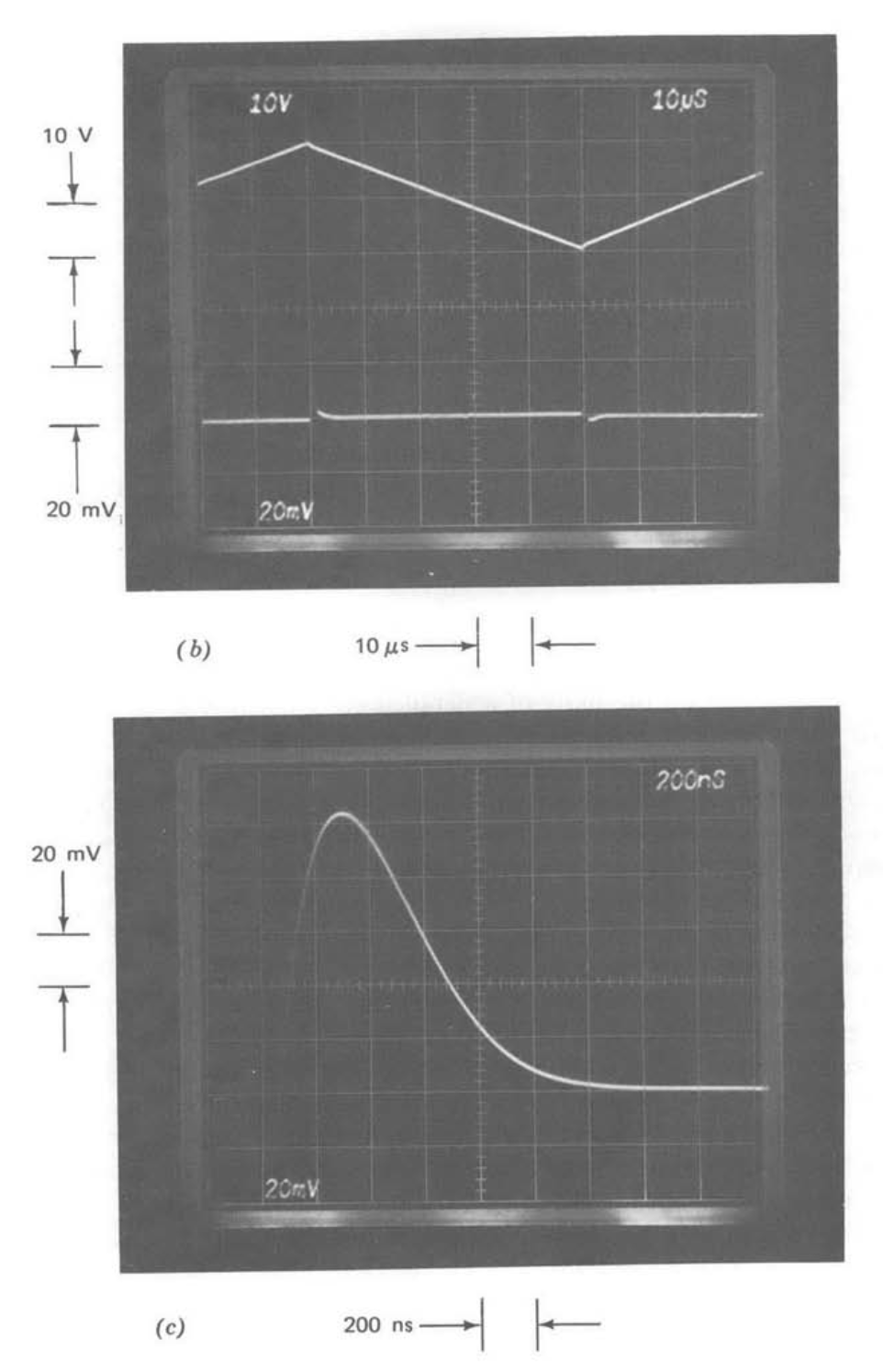
Figura 13.24 Respuesta del amplificador inversor de ganancia unitaria con entrada de onda triangular. (La amplitud de entrada es de 20 voltios pico a pico). (\(a\)) Compensación unipolar - traza superior: salida; traza inferior: entrada inversora del amplificador operacional. (\(b\)) Compensación bipolo-traza superior: salida; traza inferior: entrada inversora del amplificador operacional. (\(c\)) Repetición de traza inferior, parte\(b\), con una velocidad de barrido más rápida.
con un condensador\(15-pF\) compensador. La señal del terminal de entrada ilustrada puede justificarse sobre la base de un análisis detallado del coeficiente de error utilizando este valor para\(a(s)\). Un argumento simplificado, que resalta la característica esencial de los coeficientes de error para este tipo de compensación, es reconocer que Ecuación\(\ref{eq13.3.20}\) implica que el propio amplificador operacional funciona como integrador en bucle abierto. Dado que la señal de salida del amplificador es una onda triangular, la señal en el terminal de entrada inversora (proporcional a la derivada de la señal de salida) debe ser una onda cuadrada. La magnitud pico de la onda cuadrada en la entrada del amplificador operacional debe ser la magnitud de la pendiente de la salida,\(4 \times 10^5\) voltios por segundo, dividida por el factor de escala\(1.5 \times 10^7\) voltios por segundo por voltio de la Ecuación\(\ref{eq13.3.20}\), o aproximadamente\(27\ mV\). Este valor es confirmado por la traza inferior en la Figura 13.24\(a\) hasta dentro de los errores experimentales.
La parte b de la Figura 13.24 compara la señal de salida y la señal aplicada al terminal de entrada inversora del amplificador operacional con la compensación bipolar descrita anteriormente. Una reducción sustancial en la señal de entrada del amplificador, y por lo tanto en el error entre la salida real e ideal, es claramente evidente con este tipo de compensación. Hay pulsos de error de área pequeña que ocurren cuando la onda triangular cambia de pendiente. Estos pulsos son difíciles de observar en la Figura 13.24\(b\). La escala de tiempo se cambia para presentar uno de estos pulsos de error claramente en la Figura 13.24\(c\). Tenga en cuenta que este pulso es efectivamente un impulso en comparación con la escala de tiempo de la señal de salida. Como se podría anticipar, cuando se usa una compensación que hace que el amplificador se comporte como un integrador doble, la señal en la entrada del amplificador es aproximadamente la segunda derivada de su salida, o un tren de impulsos im de polaridad alterna.
La ecuación\(\ref{eq13.3.18}\) muestra que
\[a(s) \simeq \dfrac{1.7 \times 10^{13}}{s^2}\label{eq13.3.21} \]
a frecuencias por debajo de aproximadamente 106 radianes por segundo para la compensación bipolar utilizada. Un valor estimado gráficamente para el área del impulso que se muestra en la Figura 13.24\(c\) es\(5 \times 10^{-8}\) voltios-segundos. Multiplicar esta área por el factor de escala\(1.7 \times 10^{13}\) voltios por segundo cuadrado por voltio de Ecuación\(\ref{eq13.3.21}\) predice un cambio en la pendiente de\(8.5 \times 10^5\) voltios por segundo en cada ruptura de la onda triangular. Este valor está en buena concordancia con el cambio de pendiente real de\(8 \times 10^5\) voltios por segundo.
Debemos enfatizar que las comparaciones entre la compensación de uno y dos polos que se presentan aquí se realizaron utilizando compensación unipolar adaptada a la atenuación de la red de retroalimentación. Si se hubiera utilizado el valor de\(30-pF\) condensador compensador estándar, el error de la configuración compensada unipolar habría sido aún mayor.
Compensación que incluye un cero
Hemos visto una serie de aplicaciones donde la red de retroalimentación o carga capacitiva en la salida del amplificador operacional introduce un polo en la transmisión de bucle. Este polo, combinado con el polo dominante único que a menudo se obtiene a través de la compensación de bucle menor, deteriorará la estabilidad.
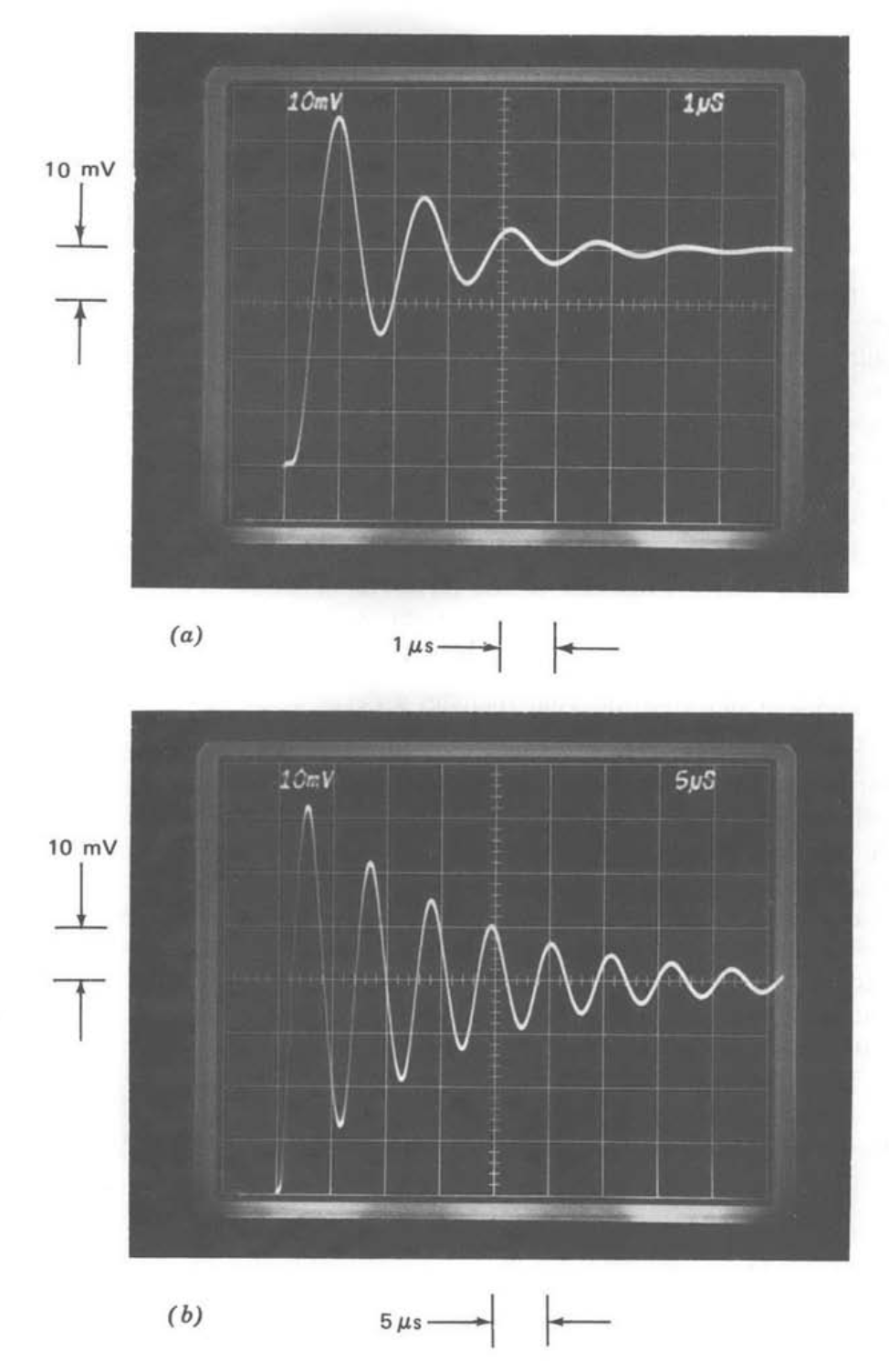
Figura 13.25 Respuesta escalonada del seguidor de ganancia de unidad cargado capacitivamente con compensación unipolar. (La amplitud del paso de entrada es\(40\ mV\).) (a) condensador\(0.01-\mu F\) de carga. (\(b\)) condensador\(0.1-\mu F\) de carga.
La Figura 13.25 muestra cómo la carga capacitiva disminuye la estabilidad del LM301A cuando se usa compensación unipolar. El amplificador se conectó como seguidor de ganancia unitaria y se compensó con un solo\(30-pF\) condensador para obtener estas respuestas. Los valores de carga-condensador utilizados fueron\(0.01\ \mu F\) y\(0.1\ pF\) para partes\(a\) y\(b\), respectivamente.
Estas respuestas transitorias se pueden utilizar para estimar la resistencia de salida de bucle abierto del amplificador operacional. Sabemos que la función de transferencia de bucle abierto para este amplificador compensado con un\(30-pF\) condensador es
\[a(s) \simeq \dfrac{7.7 \times 10^6}{s} \nonumber \]
en ausencia de carga. Esta función de transferencia es también el negativo de la transmisión de bucle descargado para la conexión del seguidor. Cuando se incluye carga capacitiva, la transmisión de bucle cambia a
\[L(s) \simeq -\dfrac{7.7 \times 10^6}{s(R_o C_L s + 1)}\label{eq13.3.23} \]
donde\(R_o\) está la resistencia de salida de bucle abierto del amplificador y\(C_L\) es el valor del condensador de carga.
La frecuencia de timbre que se muestra en la Figura 13.25\(b\) es aproximadamente\(1.1 \times 10^6\) radianes por segundo. Dado que esta respuesta está mal amortiguada, la frecuencia de timbre debe aproximarse estrechamente a la frecuencia de cruce. Además, la mala amortiguación también indica que el cruce ocurre muy por encima de la frecuencia de ruptura del segundo polo en la Ecuación\(\ref{eq13.3.23}\).
Estas relaciones, combinadas con el valor conocido para\(C_L\), permiten que la Ecuación se resuelva\(\ref{eq13.3.23}\) para\(R_o\), con el resultado
\[R_o \simeq \dfrac{7.7 \times 10^6}{\omega_c^2 C_L} = 65\ \Omega \lable{eq13.3.24} \nonumber \]
Una manera sencilla de mejorar la estabilidad es incluir un cero en la función de transferencia de bucle abierto descargada del amplificador para compensar parcialmente el desplazamiento de fase negativo del polo adicional en las proximidades del cruce. Si se usa una red de resistencia-condensador en serie con valores de componentes\(R_c\) y\(C_c\) para compensación, la admitancia de transferencia de cortocircuito de la red es
\[Y_c = \dfrac{C_c s}{R_c C_c s + 1} \nonumber \]
El valor aproximado para la función de transferencia de bucle abierto descargada correspondiente del amplificador es
\[a(s) \simeq \dfrac{K(R_c C_c s + 1)}{C_c s} \lable{eq13.3.26} \nonumber \]
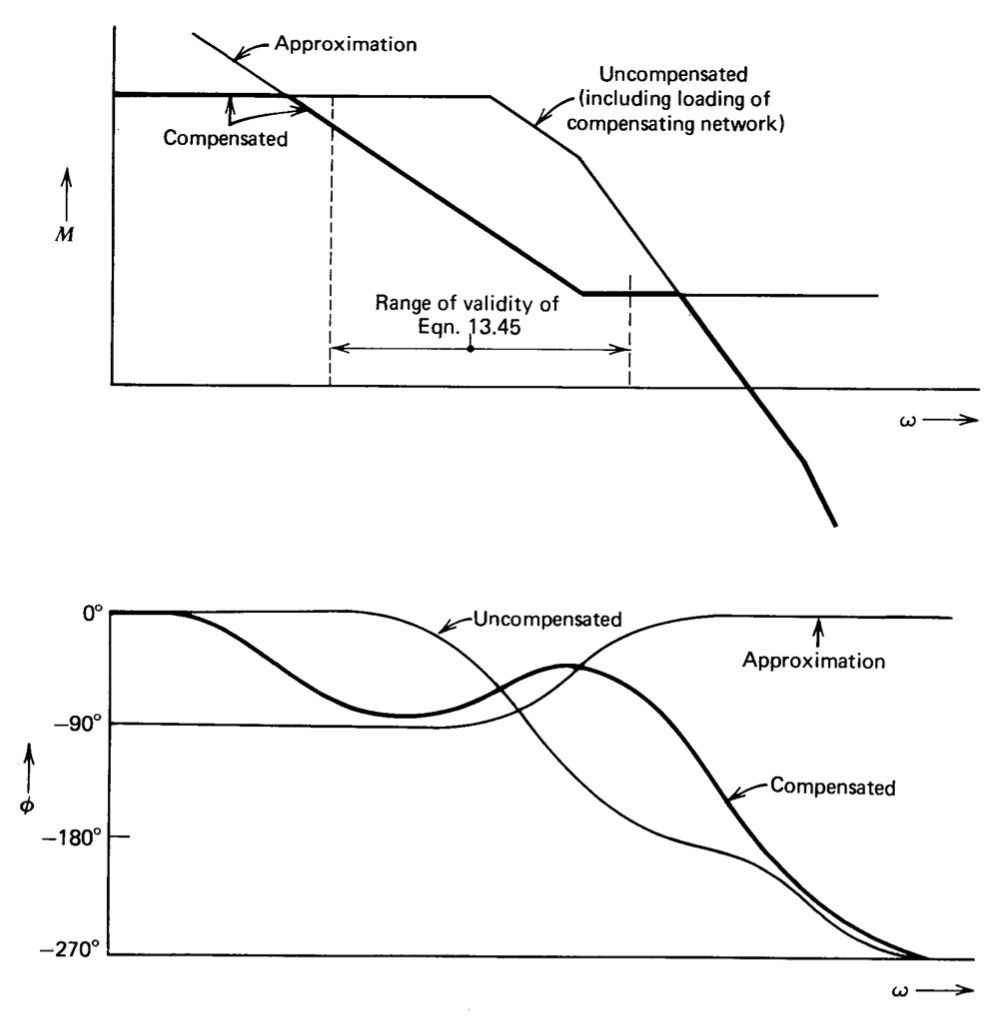
Figura 13.26 Función de transferencia de bucle abierto descargada para compensación que incluye un cero.
En la Figura 13.26 se muestra una estimación de la transferencia de bucle abierto completa\(\ref{eq13.3.26}\) y descargada con este tipo de compensación, basada en la Ecuación y características representativas del amplificador sated no compen. Tenga en cuenta que en este caso la pendiente de la función de aproximación es cero cuando se cruza con la función de transferencia no compensada. La geometría involucrada muestra que la aproximación falla a frecuencias más bajas que en el caso de otros tipos de compensación.
La transmisión de bucle aproximada para el seguidor de ganancia unitaria con carga capacitiva y este tipo de compensación es
\[L(s) \simeq -\dfrac{K(R_c C_c s + 1)}{C_c s (R_o C_L s + 1)} \lable{eq13.3.27} \nonumber \]
\(C_c\)Los valores apropiados\(R_c\) y para el LM301A cargado con un\(0.1-\mu F\) condensador son\(33\ k\Omega\) y\(30\ pF\), respectivamente. Sustituir estos y otros valores previamente determinados en\(\ref{eq13.3.27}\) rendimientos de ecuaciones
\[L(s) \simeq -\dfrac{7.7 \times 10^6 (10^{-6} s + 1)}{s (6.5 \times 10^{-6} s + 1)} \lable{eq13.3.28} \nonumber \]
La frecuencia de cruce para Ecuación\(\ref{eq13.3.28}\) es\(1.4 \times 10^6\) radianes por segundo y el margen de fase es aproximadamente\(55^{\circ}\), aunque los polos de mayor frecuencia ignorados en la aproximación resultarán en un margen de fase más bajo para el sistema real.
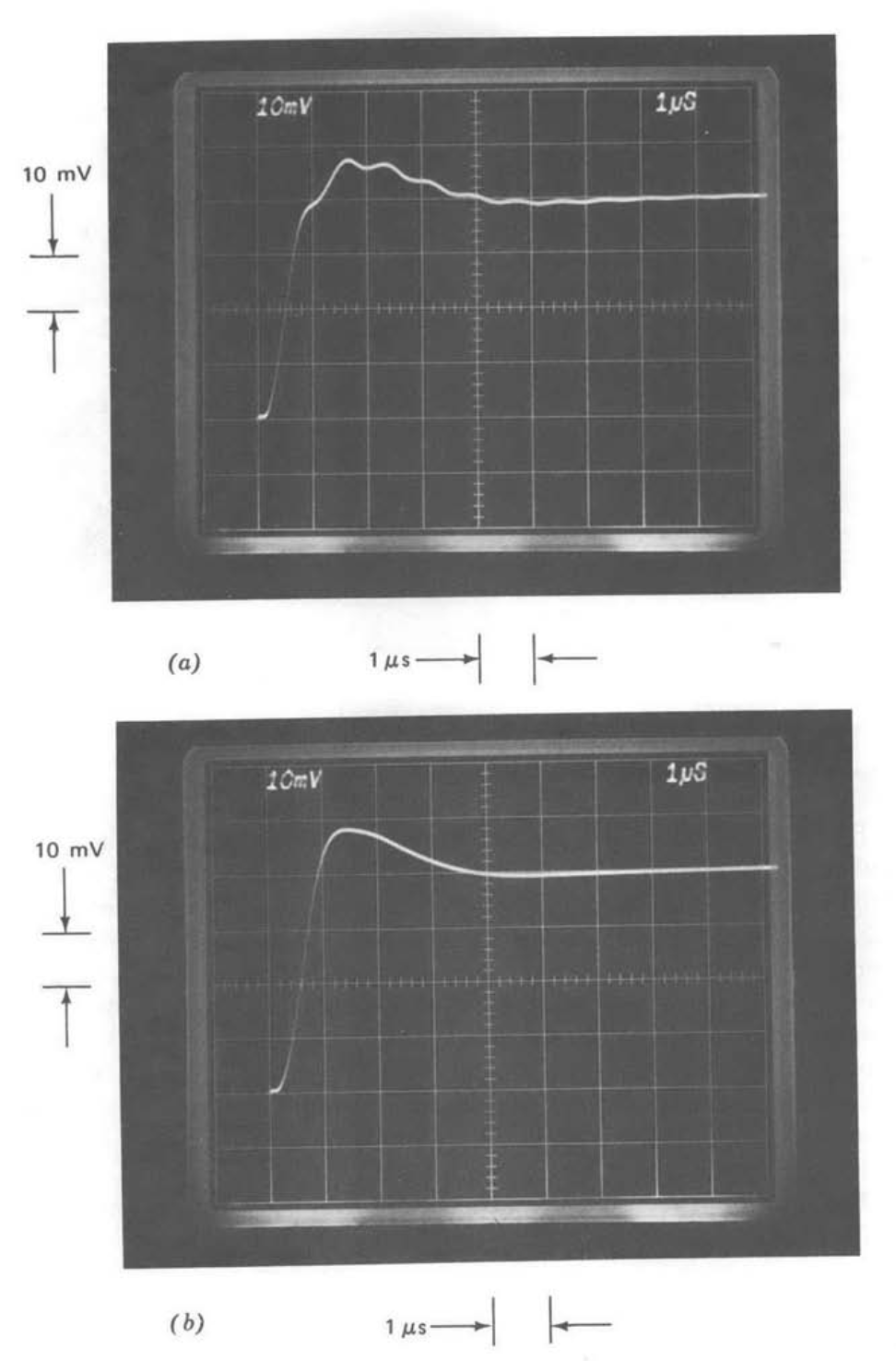
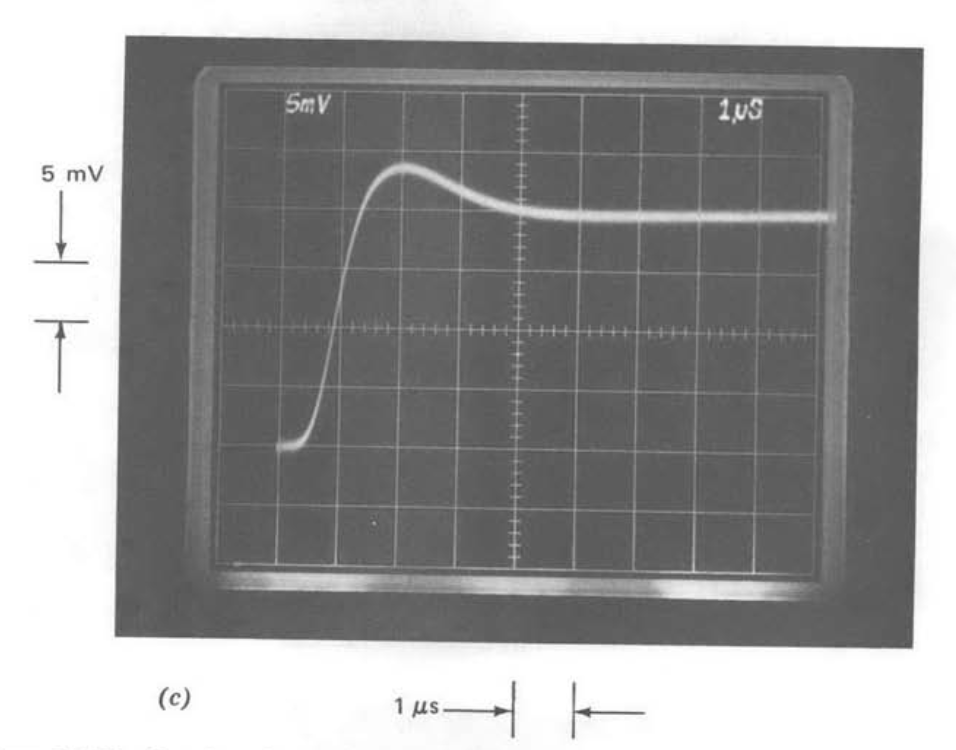
Figura 13.27 Respuesta escalonada del inversor de ganancia unitaria cargado con\(0.1\ \mu F\) condensador y compensado con un cero. (La amplitud de paso de entrada es\(40\ mV\) para partes\(a\) y\(b\),\(2\ mV\) para parte)\(c\). (\(a\)) Con compensación de resistencia-condensador en serie. (\(b\)) Con red compensadora de la Figura 13.29. (\(c\)) Señal de entrada de menor amplitud.
La respuesta escalonada del amplificador de prueba conectado de esta manera se muestra en la Figura 13.27\(a\). Aunque la estructura básica de la respuesta transitoria es muy superior a la mostrada en la Figura 13.25\(b\), hay un timbre de alta frecuencia de pequeña amplitud superpuesto sobre el transitorio principal. Este componente, a una frecuencia muy por encima de la frecuencia de cruce de bucle principal, refleja la inestabilidad potencial de bucle menor.
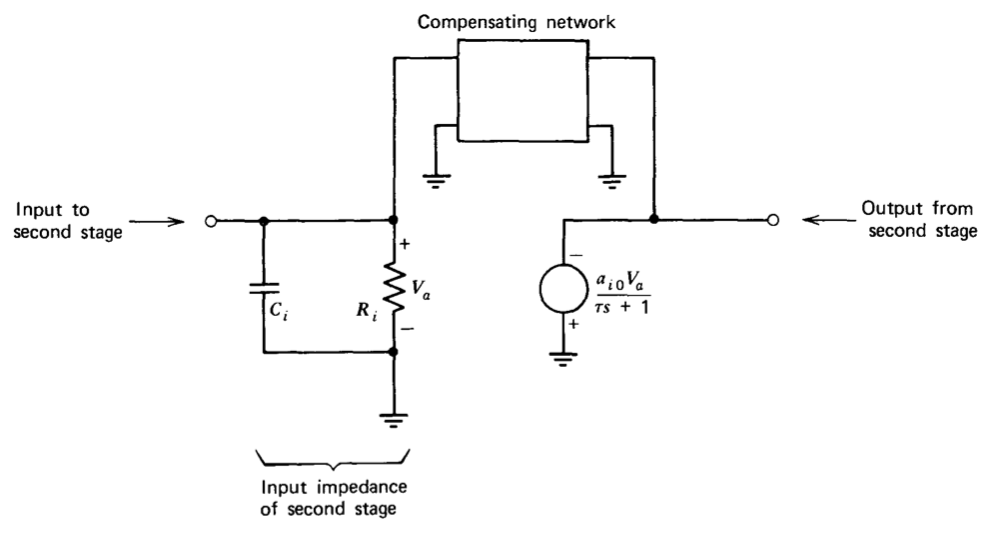
Figura 13.28 Modelo para la segunda etapa de un amplificador de dos etapas.
La Figura 13.28 ilustra el mecanismo responsable de la inestabilidad. Este diagrama combina un modelo idealizado para la segunda etapa de un amplificador de dos etapas con una red compensadora. (La discusión de la Sección 9.2.3 justifica este modelo general para una etapa de alta ganancia.) Cuando la frecuencia de cruce del bucle formado por la red de compensación es mucho mayor que\(1/R_iC_i\), la entrada de la segunda etapa se ve capacitiva en el cruce. Si la admitancia de transferencia de red de compensación es capacitiva en las proximidades del cruce, el margen de fase del bucle interno se aproxima\(90^{\circ}\). Alternativamente, si la red de compensación es resistiva, la capacitancia de entrada introduce un segundo polo en la transmisión de bucle interno y el margen de fase de este bucle disminuye.
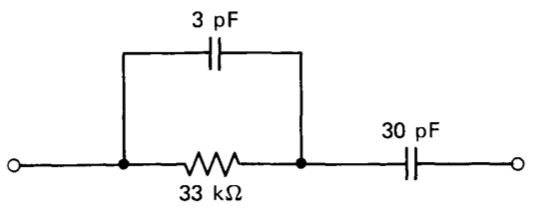
Figura 13.29 Red compensadora utilizada para obtener transitorios mostrados en las Figuras 13.27\(b\) y 13. 27\(c\).
La solución es agregar un pequeño condensador a la red compensadora como se indica en la Figura 13.29. El elemento adicional asegura que la admitancia de transferencia de red sea capacitiva a la frecuencia de cruce de bucle menor, mejorando así la estabilidad. La transmisión de bucle aproximada del bucle principal se cambia de la dada en la Ecuación\(\ref{eq13.3.28}\) a
\[L(s) \simeq - \dfrac{7.7 \times 10^6 (10^{-6} s + 1)}{s (6.5 \times 10^{-6} s + 1)(10^{-7} s + 1)}\lable{eq13.3.29} \nonumber \]
El efecto en el bucle mayor es introducir un polo a una frecuencia aproximadamente un factor de 7 por encima del cruce, reduciendo así el margen de fase en\(8^{\circ}\).
La respuesta escalonada mostrada en la Figura 13.27\(b\) resulta con esta modificación. Una característica interesante de este transitorio es que también tiene una cola con una duración que parece inconsistente con la velocidad de la subida inicial. Si bien hay un cero incluido en la función de transferencia de bucle cerrado de esta conexión ya que el cero en la ecuación\(\ref{eq13.3.29}\) ocurre en la ruta de avance, el cero está cerca de la frecuencia de cruce del bucle principal. En consecuencia, cualquier cola que resulte de un doblete formado por un polo de bucle cerrado que se combine con este cero tendría un tiempo de decaimiento consistente con la frecuencia de cruce del bucle principal. De hecho, la duración de la cola evidente en la Figura 13.27\(b\) es razonable en vista de la frecuencia de cruce\(1.4 \times 10^6\) radianes por segundo del bucle mayor. La inconsistencia se deriva de una subida inicial demasiado rápida.
La clave para explicar este fenómeno es señalar que la pendiente de la señal de salida alcanza un valor máximo de aproximadamente\(6 \times 10^4\) voltios por segundo, lo que implica una corriente de\(6-mA\) carga en el\(0.1-\mu F\) condensador. Este nivel de corriente está sustancialmente por encima de la corriente de reposo de la etapa de salida del LM301A, y da como resultado una menor resistencia de salida del seguidor de emisor activo durante la transición rápida. En consecuencia, el polo asociado con la carga capacitiva se mueve hacia frecuencias más altas durante el transitorio inicial de alta corriente, y la velocidad de respuesta del sistema im lo demuestra en esta porción.
La Figura 13.27\(c\) verifica este razonamiento ilustrando la respuesta del seguidor cargado capacitivamente a un paso de señal de\(2-mV\) entrada. Un amplificador de ganancia de 10 (realizado con otro LM301A debidamente compensado) amplificó la señal de salida para permitir la visualización en el nivel de 5 MV por división indicado en la fotografía. Si bien este transitorio es considerablemente más ruidoso (reflejando las señales de menor amplitud), la velocidad relativa de varias porciones del transitorio es más cercana a la esperada de un sistema lineal.
El cambio fraccional en la resistencia de salida con nivel de corriente de salida es probablemente inferior al 25% para este amplificador porque el componente dominante de la resistencia de salida es el valor en el nodo de alta resistencia dividido por la ganancia de corriente del amplificador de búfer. En consecuencia, las diferencias entre las figuras 13.27\(b\) y 13.27\(c\) son menores. También hay que señalar que el valor de esti apareado para\(R_o\) (Ecuación\(\ref{eq13.3.24}\)) es probablemente ligeramente bajo debido a este efecto.
Muchas aplicaciones, como los circuitos de muestreo y retención o los reguladores de voltaje, aplican carga capacitiva a un amplificador operacional. Otras conexiones, como un diferenciador, agregan un polo a la transmisión de bucle debido a la función de transferencia de la red de retroalimentación. El método de agregar una compensación de cero a un solo polo puede mejorar el rendimiento sustancialmente en este tipo de aplicaciones.
La comparación entre las figuras 13.25\(b\) y 13.27\(b\) muestra cómo cambiar de\(30-pF\) compensación a compensación que incluye un cero puede mejorar en gran medida la estabilidad y puede reducir el tiempo de sedimentación en más de un factor de 10 para un seguidor de voltaje cargado capacitivamente.
Se debe enfatizar que este tipo de compensación no se sugiere para uso general, ya que los valores de los elementos de red compensadora deben elegirse cuidadosamente en función de los valores de parámetro de bucle para la estabilidad capaz de aceptar. Si, por ejemplo, el polo que introdujo la necesidad de este tipo de compensación se elimina o se mueve a una frecuencia más alta, la frecuencia de cruce aumenta y puede resultar inestabilidad.
Compensación de Rolloff Lento
La discusión de la última sección mostró cómo se puede diseñar la compensación para introducir un cero en la función de transferencia de bucle abierto compensada de un amplificador operacional. El cero se puede utilizar para compensar los efectos de un polo asociado con otros elementos en el bucle. Dado que la ubicación cero se selecciona como una función de otros parámetros de bucle, este tipo de compensación se adapta específicamente de manera efectiva para una red de retroalimentación fija y carga.
Hay aplicaciones donde las funciones de transferencia de ciertos elementos en un bucle operacional-amplificador varían en función de las condiciones de operación o a medida que cambian los componentes que rodean al amplificador. El cambio en la resistencia de salida de bucle abierto del amplificador descrito en relación con las figuras 13.27\(b\) y 13.27\(c\) es un ejemplo de este tipo de variación de parámetros.
Los amplificadores operacionales que se utilizan (a menudo con la adición de etapas de salida de alta corriente) para suministrar voltajes regulados son otro ejemplo. La capacitancia total conectada a la salida de una fuente a menudo está dominada por los condensadores de desacoplamiento incluidos con los circuitos que alimenta. La resistencia de salida de la etapa de potencia también puede depender de la corriente de carga, y estos dos efectos pueden combinarse para producir una gran incertidumbre en la ubicación del polo asociado con la carga capacitiva. Un enfoque para estabilizar este tipo de reguladores se describió en la Sección 5.2.2.
Un tercer ejemplo de un bucle de parámetro variable implica el uso de un amplificador operacional, una lámpara incandescente y una fotorresistencia en un bucle de retroalimentación destinado a controlar la intensidad de la lámpara. En este caso, la dinámica tanto de la lámpara como de la fotorresistencia así como la “ganancia” de baja frecuencia de la combinación dependen del nivel de luz.
La estabilización de los sistemas de parámetros variables suele ser difícil y frecuentemente son necesarios compromisos, particularmente con respecto al tiempo de sedimentación y la desensitividad. En esta sección se describe un enfoque para la estabilización de dichos sistemas e indica el efecto de los compromisos necesarios en el desempeño.
Considere un sistema de parámetros variables que tenga una transmisión en bucle
\[L(s) = -a(s) \left (\dfrac{k}{\tau s + 1} \right ) \label{eq13.3.30} \]
donde\(k\) y\(\tau\) representan los valores inciertos asociados con elementos externos al amplificador operacional. Se supone que estos parámetros pueden tener cualquier valor positivo. Si se selecciona la función de transferencia de bucle abierto del amplificador de tal manera que
\[a(s) = \dfrac{K'}{\sqrt{s}} \label{eq13.3.31} \]
el margen de fase de la Ecuación\(\ref{eq13.3.30}\) será al menos\(45^{\circ}\) para cualquier valor de\(k\) y\(\tau\), ya que el desplazamiento de fase de la función\(1/\sqrt{s}\) es\(-45^{\circ}\) en todas las frecuencias.
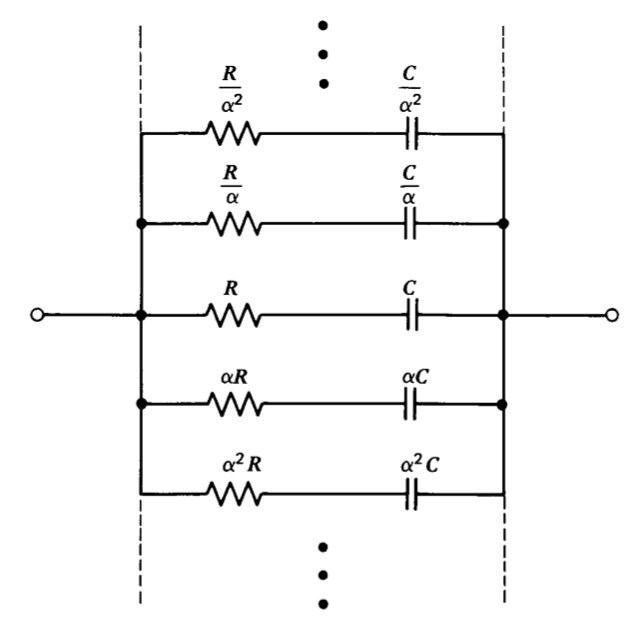
Figura 13.30 Red utilizada para aproximar una admisión proporcional a\(\sqrt{s}\).
Para obtener la función de transferencia en bucle abierto indicada por Ecuación\(\ref{eq13.3.31}\) a partir de un amplificador de dos etapas, es necesario utilizar una red que tenga una admitancia de transferencia de cortocircuito proporcional a\(\sqrt{s}\). Si bien la admisión requerida no puede realizarse con una red agrupada y finita, se puede aproximar mediante la estructura de escalera que se muestra en la Figura 13.30. La admisión de punto de conducción de esta red (que es, por supuesto, igual a su admisión de transferencia de cortocircuito) es
\[Y_c (s) = + \cdots + \dfrac{(C/\alpha^2)s}{(RC/\alpha^4)s + 1} + \dfrac{(C/\alpha )s}{(RC/\alpha^2)s + 1} + \dfrac{Cs}{RCs + 1} + \dfrac{\alpha Cs}{\alpha^2 RCs + 1} + \dfrac{\alpha^2 Cs}{\alpha^4 RCs + 1} + \cdots + \label{eq13.3.32} \]
Los polos de la Ecuación\(\ref{eq13.3.32}\) se encuentran en
\[\begin{array} {rcl} {} & \cdot & {} \\ {} & \cdot & {} \\ {} & \cdot & {} \\ {p_{n + 2}} & = & {-\dfrac{\alpha^4}{RC}} \\ {p_{n + 1}} & = & {-\dfrac{\alpha^2}{RC}} \\ {p_n} & = & {-\dfrac{1}{RC}} \\ {p_{n - 1}} & = & {-\dfrac{1}{\alpha^2 RC}} \\ {p_{n - 2}} & = & {-\dfrac{1}{\alpha^4 RC}} \\ {} & \cdot & {} \\ {} & \cdot & {} \\ {} & \cdot & {} \end{array} \nonumber \]
mientras que sus ceros se encuentran en
\[\begin{array} {rcl} {} & \cdot & {} \\ {} & \cdot & {} \\ {} & \cdot & {} \\ {z_{n + 2}} & = & {-\dfrac{\alpha^3}{RC}} \\ {z_{n + 1}} & = & {-\dfrac{\alpha}{RC}} \\ {z_n} & = & {-\dfrac{1}{\alpha RC}} \\ {z_{n - 1}} & = & {-\dfrac{1}{\alpha^3 RC}} \\ {z_{n - 2}} & = & {-\dfrac{1}{\alpha^5 RC}} \\ {} & \cdot & {} \\ {} & \cdot & {} \\ {} & \cdot & {} \end{array} \nonumber \]
Esta función de admitancia tiene polos y ceros que se alternan a lo largo del eje real negativo, con la relación de las ubicaciones de cualesquiera dos singularidades adyacentes una constante igual a\(\alpha\). En promedio, la magnitud de esta función aumentará proporcionalmente a la raíz cuadrada de frecuencia ya que en una gráfica asintótica log-magnitud versus log-frecuencia alterna regiones de igual duración con pendientes de cero y uno.
Si esta red se utiliza para compensar un amplificador de dos etapas, la función de transferencia de bucle abierto del amplificador
\[a(s) \simeq \dfrac{K}{Y_c (s)}\label{eq13.3.35} \]
aproximará la relación dada en la Ecuación\(\ref{eq13.3.31}\). Si la magnitud de la función de transferencia de bucle abierto del amplificador no compensado es adecuadamente alta, el rango de frecuencias sobre el cual es válida la aproximación se puede hacer arbitrariamente ancho mediante el uso de un número suficientemente grande de secciones en la red de escalera. Obsérvese que también es posible hacer que la función de transferencia compensada sea proporcional a\(1/s^r\), donde\(r\) está entre cero y uno, mediante la selección apropiada del espaciado relativo polo-cero en la red compensadora.
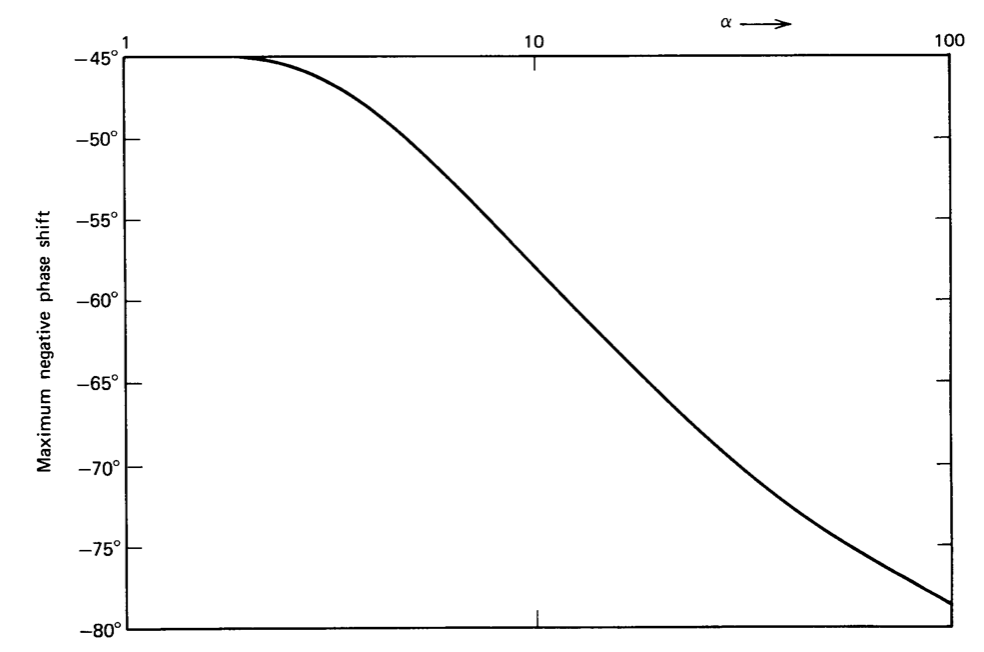
Figura 13.31 Desplazamiento máximo de fase negativo en función\(\alpha\) de la\(1/\sqrt{s}\) compensación.
Dado que el objetivo habitual de este tipo de compensación es mantener un margen de fase satisfactorio en sistemas con valores de parámetros inciertos, las pautas para seleccionar la relación de frecuencia entre singularidades adyacentes a se determinan mejor al señalar cómo la fase de la función de transferencia real es influenciada por esta cantidad. Si los polos y ceros están muy separados, el desplazamiento de fase de la función de transferencia de bucle abierto compensada estará aproximadamente\(- 45^{\circ}\) sobre el rango de frecuencia efectivo de la red. A medida que se incrementa, la magnitud de la ondulación de fase con frecuencia, que es simétrica con respecto a\(- 45^{\circ}\), aumenta. El desplazamiento de fase negativo máximo de\(a(j\omega)\) (ver Ecuaciones\(\ref{eq13.3.32}\) y\(\ref{eq13.3.35}\)) se grafica como una función de a en la Figura 13.31.
Esta gráfica muestra que se pueden usar valores razonablemente grandes de a sin que el desplazamiento de fase negativo máximo sea demasiado grande. Si, por ejemplo, se usa un espaciamiento entre singularidades adyacentes de un factor de 10 en frecuencia, el desplazamiento de fase negativo máximo es\(-58^{\circ}\). Dado que la ondulación de fase es simétrica con respecto a\(-45^{\circ}\), el desplazamiento de fase varía de\(-32^{\circ}\) a\(-58^{\circ}\) como una función de la frecuencia para este valor de\(\alpha\). Si un amplificador compensado usando una red con\(\alpha = 10\) se combina en un bucle con un elemento que produce un desplazamiento\(-90^{\circ}\) de fase adicional en el cruce, el margen de fase del sistema variará de\(58^{\circ}\) a\(32^{\circ}\).
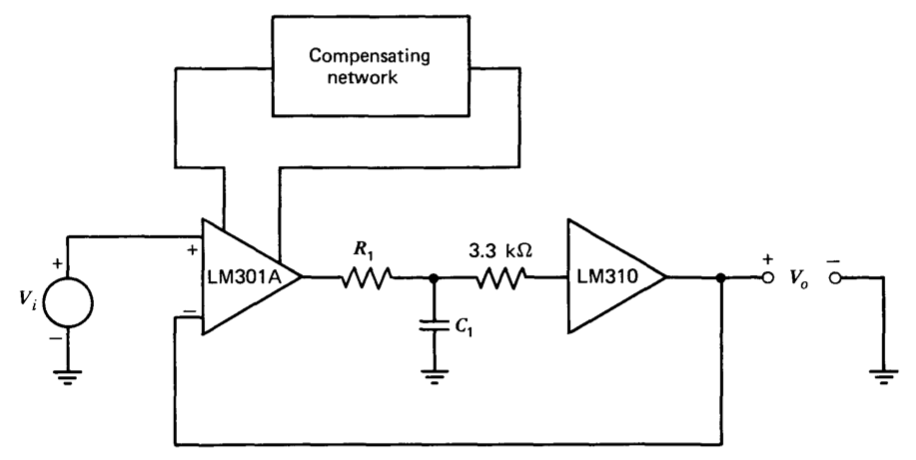
Figura 13.32 Circuito utilizado para evaluar la compensación de rolloff lento.
Se compara el rendimiento de un\(1/\sqrt{s}\) sistema con el de sistemas compensados alternativamente utilizando la conexión-, mostrada en la Figura 13.32. Siempre que la resistencia de salida de bucle abierto del amplificador operacional sea mucho menor que\(R_1\), la\(R_1-C_1\) red agrega un polo con una ubicación bien determinada a la transmisión en bucle del sistema. El seguidor de ganancia unitaria LM310 se utiliza para evitar cargar la red. El\(3.3-k\Omega\) resistor incluido en serie con la entrada LM310 es recomendado por el fabricante para mejorar la estabilidad de este circuito. El ancho de banda de este seguidor es lo suficientemente alto como para tener un efecto insignificante en la dinámica del bucle.
El circuito mostrado en la Figura 13.32 tiene una función de transferencia de trayectoria directa igual a\(a(s)/(RCs + 1)\) y una función de transferencia de retroalimentación de uno.
Con esta conexión se evaluaron tres tipos diferentes de compensación. Un tipo fue compensación unipolar usando un\(220-pF\) condensador. La función aproximada de transferencia de bucle abierto del LM301A es
\[a(s) \simeq \dfrac{10^6}{s}\label{eq13.3.36} \]
con esta compensación. La transmisión de bucle correspondiente es
\[L(s) = -\dfrac{10^6}{s (R_1 C_1 s + 1)} \nonumber \]
La función de transferencia de bucle cerrado es
\[\dfrac{V_o (s)}{V_i (s)} = A(s) = \dfrac{1}{10^{-6} R_1 C_1 s^2 + 10^{-6} s + 1}\label{eq13.3.38} \]
Los parámetros de segundo orden para la ecuación\(\ref{eq13.3.38}\) son
\[\omega_n = \dfrac{10^3}{\sqrt{R_1 C_1}} \ \ \text{ and } \ \ \zeta = \dfrac{5 \times 10^{-4}}{\sqrt{R_1 C_1}} \nonumber \]
Como era de esperar, aumentar la constante de\(R_1-C_1\) tiempo disminuye tanto la frecuencia natural como la relación de amortiguación del sistema.
La segunda red compensadora fue una red de escalera de 11 “peldaños” del tipo que se muestra en la Figura 13.30. La secuencia de valores de resistencia-condensador utilizada para los peldaños fue\(330\ \Omega-10\ pF\),\(1\ k\Omega-33\ pF\),\(3.3\ k\Omega-100\ pF \cdots 10\Omega-0.33\ \mu F, 33\ M\Omega - 1\ \mu F\).
Esta red se combina con parámetros de amplificador operacional para producir una función aproximada de transferencia de bucle abierto
\[a'(s) \simeq \dfrac{10^3}{\sqrt{s}}\label{eq13.3.39} \]
sobre un rango de frecuencia que se extiende desde por debajo de 0.1 radianes por segundo hasta por encima de\(10^6\) radianes por segundo. El valor de\(\alpha\) para la aproximación es\(-\sqrt{10}\). La curva de la Figura 13.31 muestra que el desplazamiento de fase negativo máximo de la función de transferencia de bucle abierto a frecuencias intermedias debe ser\(-46.5^{\circ}\), correspondiente a una ondulación de fase pico a pico de\(3^{\circ}\).
La transmisión de bucle aproximada que resulta con esta compensación es
\[L' (s) = -\dfrac{10^3}{\sqrt{s} (R_1 C_1 s + 1)} \nonumber \]
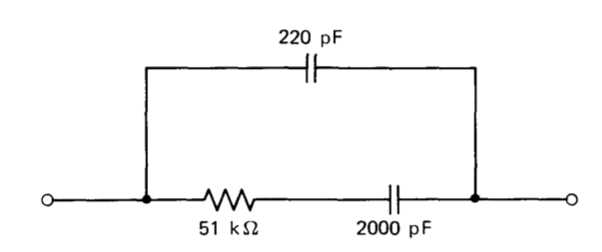
Figura 13.33 Red de rolloff lento.
La tercera compensación utilizó la red de rolloff lento de dos peldaños que se muestra en la Figura 13.33. La función de transferencia de bucle abierto del amplificador resultante es
\[a'' (s) \simeq \dfrac{10^5 (10^{-4} s + 1)}{s (10^{-5} s + 1)}\label{eq13.3.41} \]
Esta función de transferencia es una aproximación muy cruda a un\(1/\sqrt{s}\) rolloff que combina un\(1/s\) rolloff básico con una región de pendiente cero de una década realizada colocando un cero dos décadas y un polo una década por debajo de la frecuencia de ganancia unitaria. Alternativamente, la función de transferencia de bucle abierto se puede ver como el resultado de agregar una red principal ubicada muy por debajo de la frecuencia de ganancia unitaria a una función de transferencia unipolar.
La transmisión de bucle en este caso es
\[L'' (s) = -\dfrac{10^5 (10^{-4} s + 1)}{s(10^{-5} s + 1)(R_1 C_1 s + 1)}\label{eq13.3.42} \]
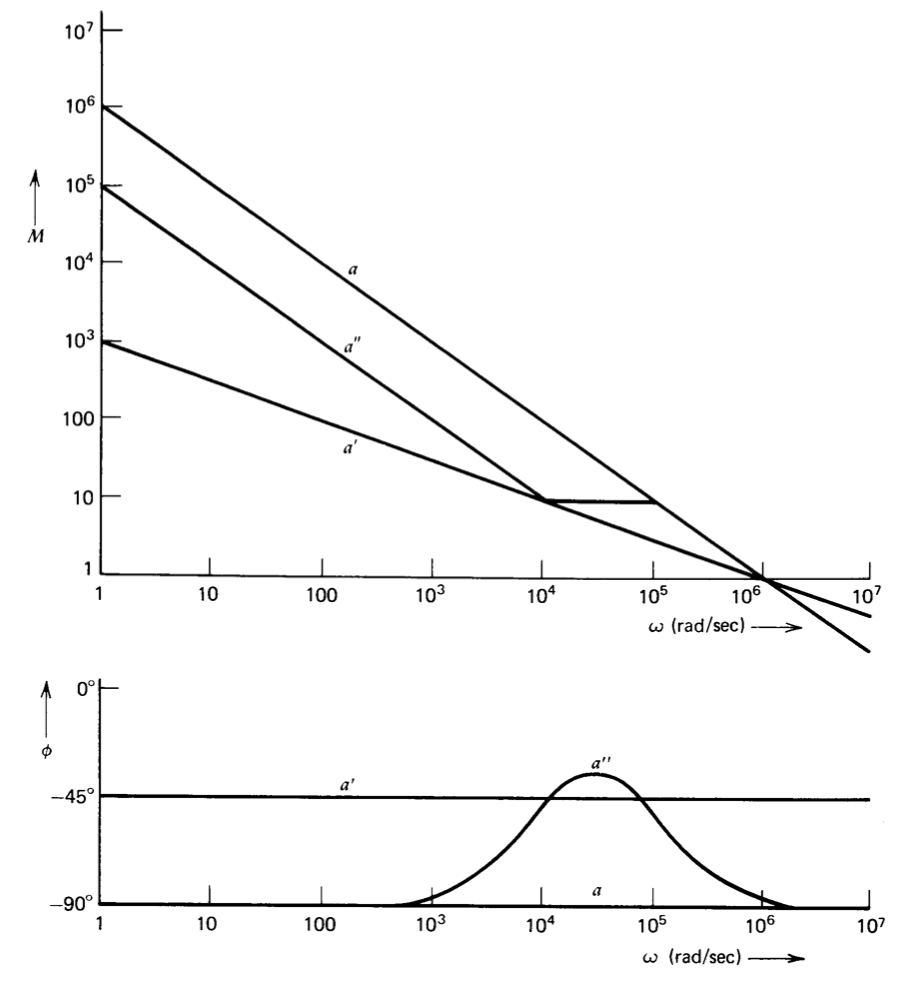
Figura 13.34 Comparación de las funciones aproximadas de transferencia en bucle abierto para tres tipos de compensación.
Las gráficas de Bode para las tres funciones compensadas de transferencia en bucle abierto de Ecuaciones\(\ref{eq13.3.36}\)\(\ref{eq13.3.39}\), y se\(\ref{eq13.3.41}\) muestran en la Figura 13.34. Tenga en cuenta que los parámetros se seleccionan de manera que las frecuencias de ganancia unitaria sean idénticas para las tres funciones de transferencia.
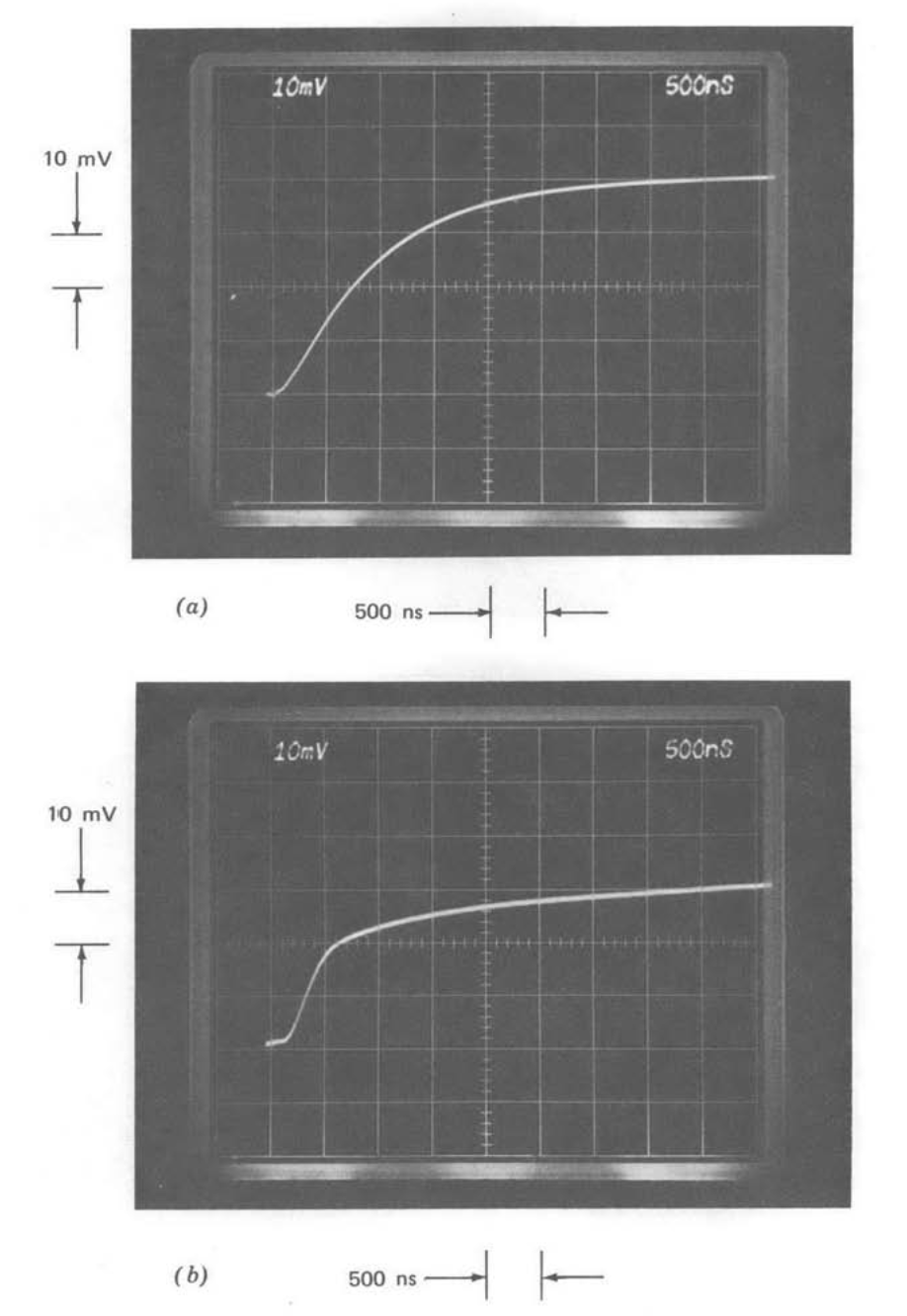
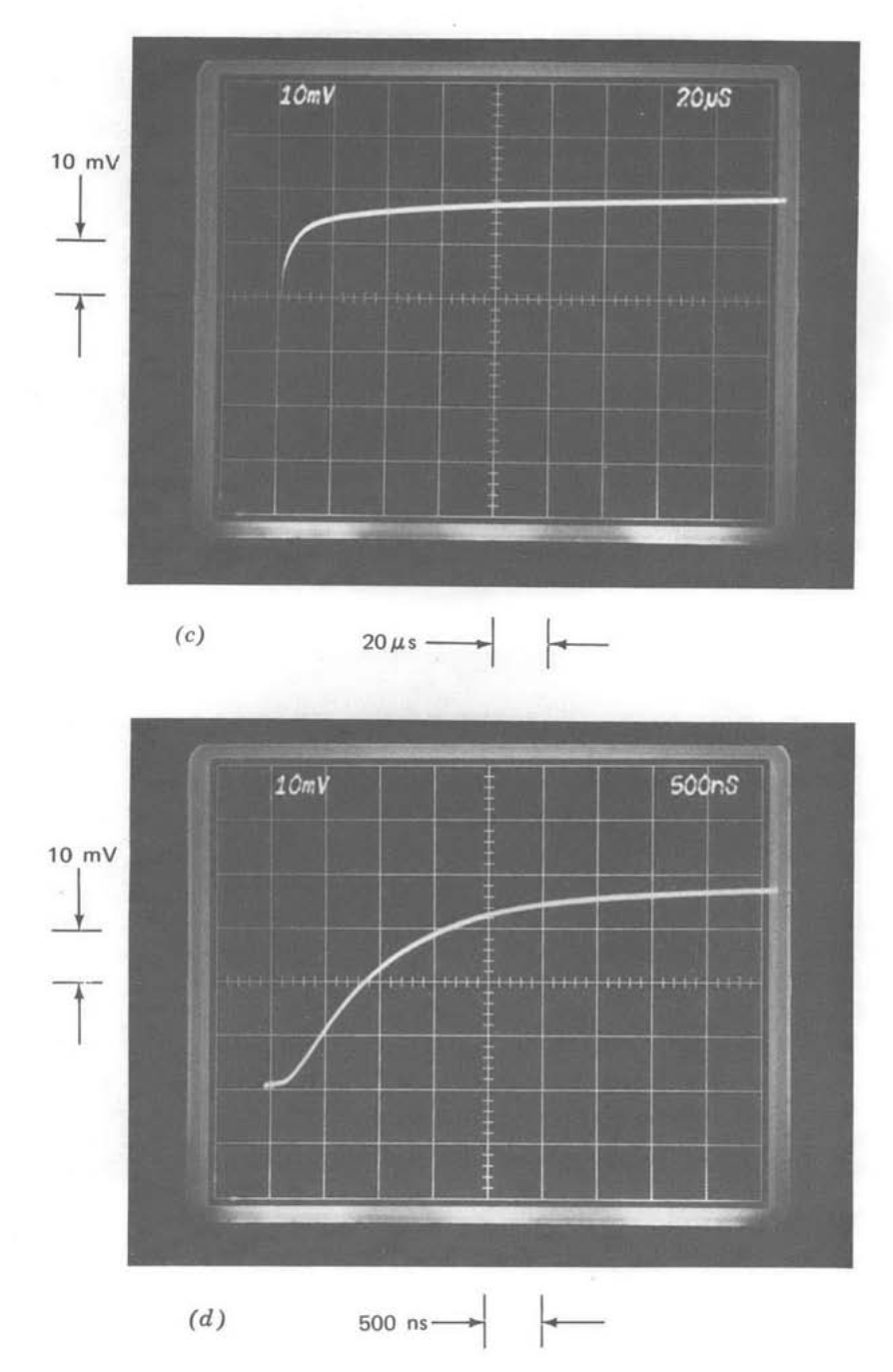
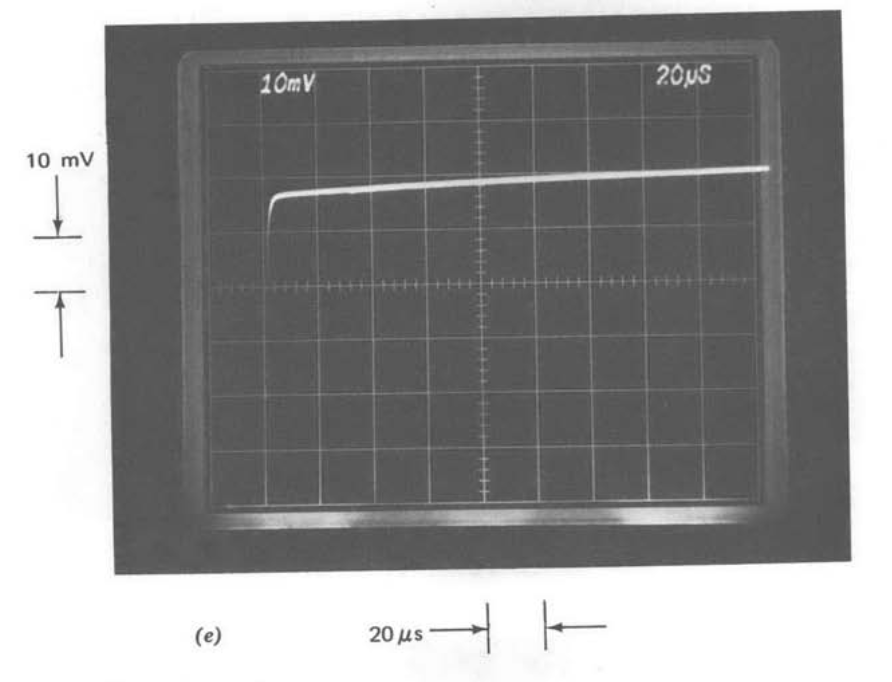
Figura 13.35 Comparación de respuestas escalonadas en función de la compensación con\(R_1C_1 = 0\). (La amplitud del paso de entrada es\(40\ mV\).) (\(a\)) Compensación unipolar. (\(b\))\(1/\sqrt{s}\) compensación. (\(c\)) Repetición de pieza\(b\) con velocidad de barrido más lenta. (\(d\)) Compensación por rolloff lento. (\(e\)) Repetición de pieza\(d\) con velocidad de barrido más lenta.
Las respuestas escalonadas para el sistema de prueba con\(R_1C_1 = 0\) se comparan para los tres tipos de compensación en la Figura 13.35. La parte A muestra la respuesta escalonada para la compensación unipolar. La respuesta exponencial esperada con un tiempo de subida de\(1-\mu s\) 0 a 63% es evidente.
La parte b muestra la respuesta con la\(1/\sqrt{s}\) compensación. Una característica interesante de esta respuesta es que si bien en realidad comienza más rápido que el del sistema anterior con la misma frecuencia de cruce (compare, por ejemplo, los tiempos requeridos para alcanzar el 25% del valor final), se asienta mucho más lentamente. Obsérvese que el transitorio mostrado en parte solo\(b\) ha alcanzado 75% del valor final después\(4.5\ \mu s\) (la amplitud de paso de entrada es de 40 mV para ambas partes\(a\) y\(b\)), mientras que el sistema que usa compensación unipolar se ha establecido dentro del 2% del valor final en este momento. Parte\(c\) es una repetición de parte\(b\) con una velocidad de barrido más lenta. Tenga en cuenta que incluso después\(180\ \mu s\), el transitorio ha alcanzado sólo el 95% del valor final. Este tipo de fluencia muy lenta hacia el valor final es característico de muchos tipos de sistemas distribuidos. Las líneas de transmisión largas, por ejemplo, a menudo exhiben respuestas escalonadas similares en forma a la ilustrada.
Partes\(d\) y\(e\) de la Figura 13.35 muestran la respuesta para el sistema mediante compensación de rolloff lento en dos escalas de tiempo diferentes. El transitorio consiste en un aumento exponencial constante de\(1-\mu s\) tiempo al 90% del valor final, seguido de un aumento constante de tiempo de 100 us al valor final. El lector debe usar Ecuación\(\ref{eq13.3.42}\) para convencerse de que la cola larga se anticipa en vista de la ubicación del doblete polo-cero de bucle cerrado que resulta en este caso. Tenga en cuenta que incluso con esta cola, asentarse en una pequeña fracción del valor final es sustancialmente más corto que para el\(1/\sqrt{s}\) sistema.
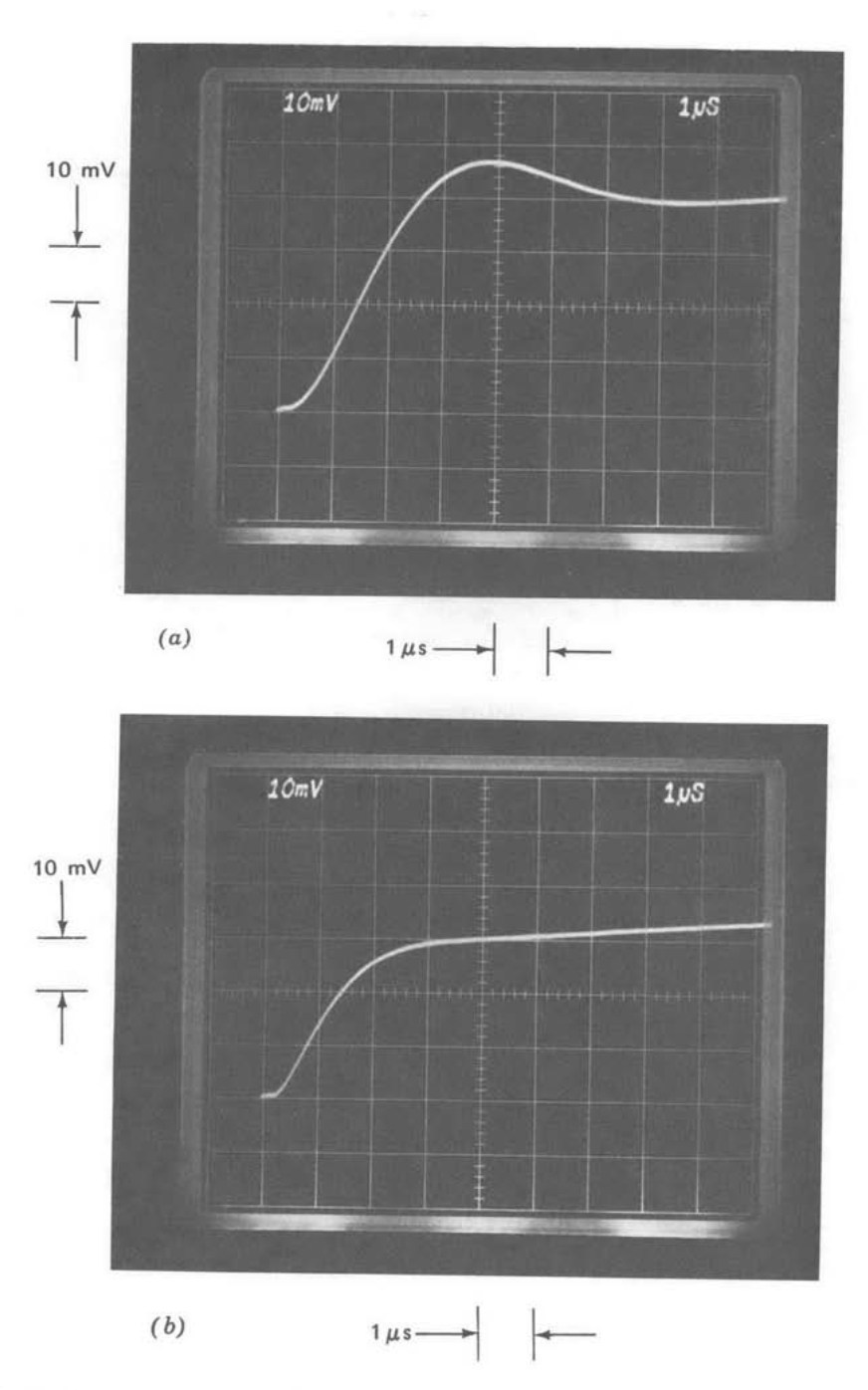
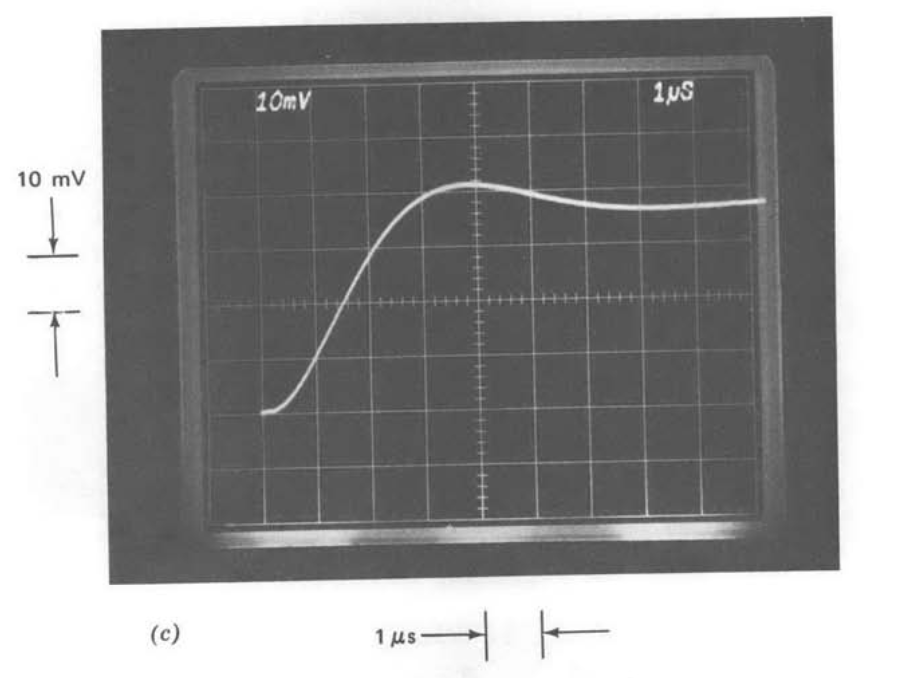
Figura 13.36 Comparación de respuestas escalonadas en función de la compensación para\(R_1 C_1 = 1\ \mu s\). (La amplitud del paso de entrada es\(40\ mV\).) (\(a\)) Compensación unipolar. (\(b\))\(1/\sqrt{s}\) compensación. (\(c\)) Compensación por rolloff lento.
La Figura 13.36 indica respuestas\(R_1 C_1 = 1\ \mu s\) para los tres tipos diferentes de compensación. Este\(R_1-C_1\) producto agrega un polo ligeramente por encima de la frecuencia de cruce resultante del bucle para todas las compensaciones. El margen de fase del sistema con compensación de un polo es aproximadamente\(50^{\circ}\), con el amortiguamiento moderado resultante mostrado en parte\(a\). El margen de fase para\(1/\sqrt{s}\) compensación supera\(90^{\circ}\) en este caso, y el efecto principal del polo extra es hacer que la porción inicial de la respuesta (ver parte\(b\)) se vea algo más exponencial. La cola muy lenta no se altera sustancialmente. La respuesta escalonada del sistema con compensación de rolloff lento (Figura 13.36\(c\)) tiene un exceso de pico ligeramente menor (medido a partir del valor final mostrado en la figura) que el sistema mostrado en parte\(a\). La diferencia refleja la ventaja de\(5^{\circ}\) margen de fase del sistema de rolloff lento. La cola no está alterada por el polo adicional.
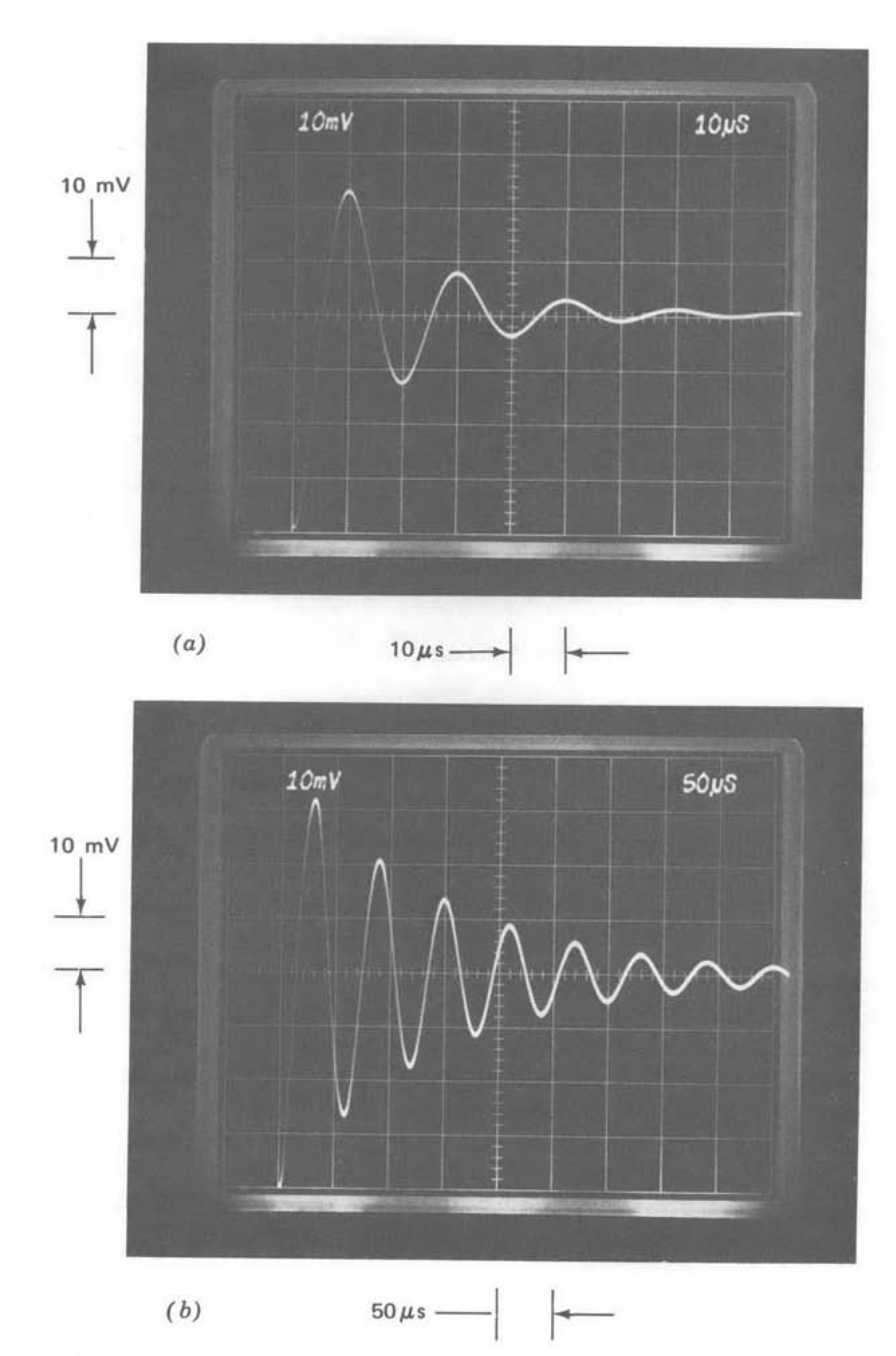
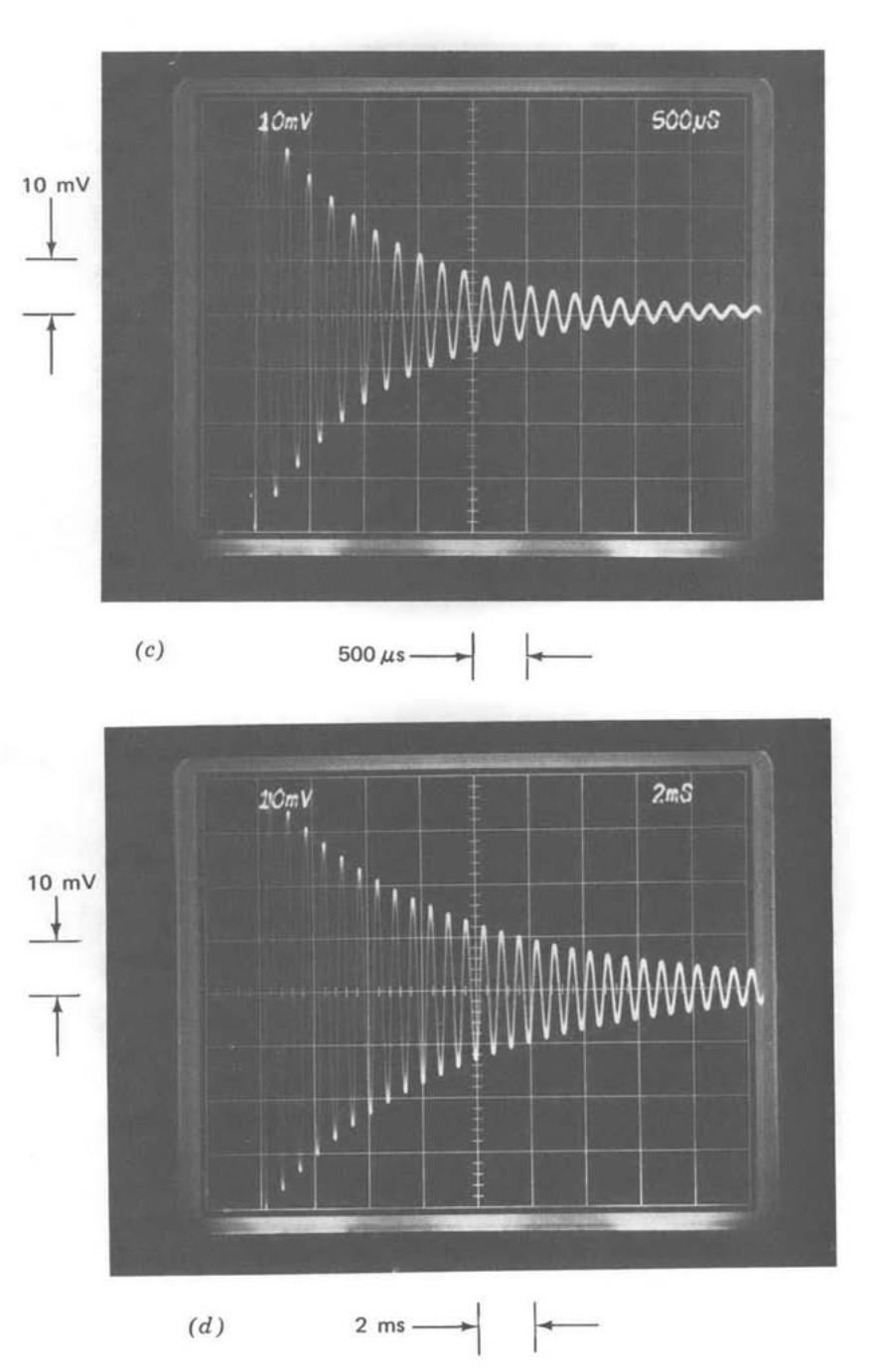
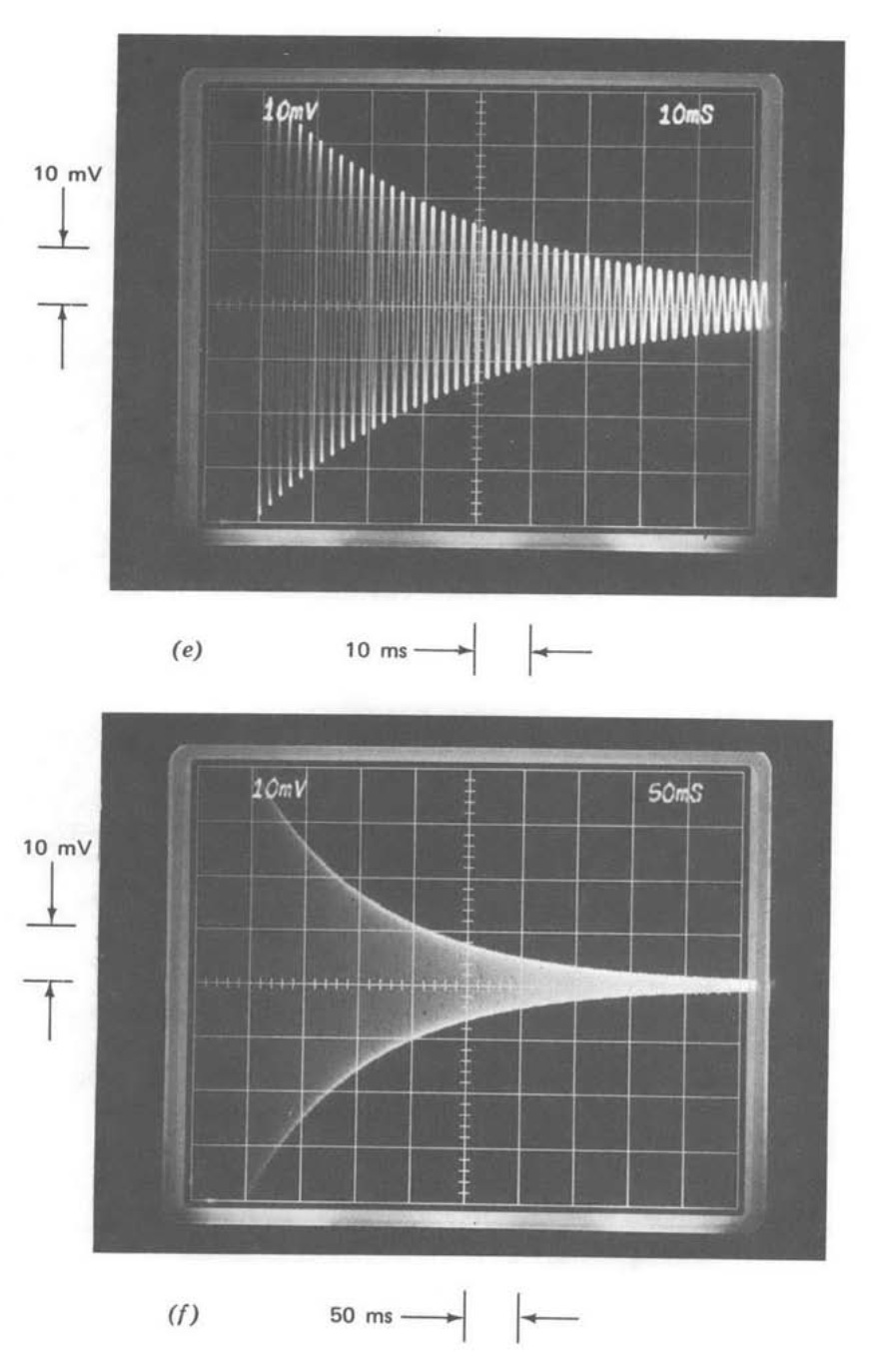
Figura 13.37 Respuesta escalonada del sistema con compensación unipolar en función de\(R_1 C_1\). (La amplitud del paso de entrada es\(40\ mV\).) (\(a\))\(R_1 C_1 = 10\ \mu s\). (\(b\))\(R_1 C_1 = 100 \ \mu s\). (\(c\))\(R_1 C_1 = 1\ ms\). (\(d\))\(R_1 C_1 = 10\ ms\). (\(e\))\(R_1 C_1 = 100\ ms\). (\(f\))\(R_1 C_1 = 100\ ms\) con condensador de poliestireno.
La respuesta escalonada experimentalmente medida del sistema con compensación unipolar se muestra en la Figura 13.37 para una serie de valores de la constante de\(R_1-C_1\) tiempo. El deterioro de la estabilidad y el tiempo de sedimentación que\(R_1 C_1\) resulta como se incrementa es claramente evidente en esta secuencia. El valor de la frecuencia natural predicha por Ecuación\(\ref{eq13.3.38}\) puede verificarse dentro de las tolerancias experimentales. Sin embargo, el sistema real está en realidad algo mejor amortiguado de lo que indica el análisis, particularmente en los casos de humedad relativamente baja. La respuesta unidad-paso para un sistema de segundo orden es
\[v_o (t) = \left [1 - \dfrac{1}{\sqrt{1 - \zeta^2}} e^{-\zeta \omega_n t} \sin \left ( \sqrt{1 - \zeta^2} \omega_n t + \Phi \right ) \right ] \nonumber \]
donde
\[\Phi = \tan^{-1} \left [\dfrac{1 - \zeta^2}{\zeta} \right ] \nonumber \]
Esta relación muestra que la constante de tiempo exponencial de la envolvente del transitorio debe tener un valor de\(1/\zeta \omega_n\), o, a partir de la Ecuación\(\ref{eq13.3.38}\),\(2R_1C_1\). Así, por ejemplo, el transitorio ilustrado en la Figura 13.37\(e\), que tiene valores determinados analíticamente de\(\omega_n = 3.1 \times 10^3\) radianes por segundo y\(\zeta = 1.6 \times 10^{-3}\), debería tener un tiempo de decaimiento aproximadamente cinco veces mayor que el realmente medido.
El motivo de esta discrepancia es el siguiente. Una extensión de las curvas mostradas en la Figura 4.26 estima que una relación de amortiguación de\(1.6 \times 10^{-3}\) corresponde a un margen de fase de\(0.184^{\circ}\). Por consiguiente, cambios muy pequeños en el ángulo de la transmisión de bucle a la frecuencia de cruce pueden cambiar la relación de amortiguación en un factor sustancial.
Hay al menos tres efectos, que (en aparente violación de las leyes de Murphy) se combinan para mejorar el margen de fase en el sistema real. Primero, el polo de bucle abierto del amplificador compensado no está realmente en el origen, y por lo tanto contribuye menos que\(90^{\circ}\) de desplazamiento de fase negativo a la transmisión de bucle en el cruce. En segundo lugar, cualquier resistencia en serie asociada con las conexiones hechas al condensador agrega un cero a la transmisión de bucle que contribuye con el desplazamiento de fase positivo en el cruce. En tercer lugar, las pérdidas asociadas con la absorción dieléctrica o el factor de disipación del condensador también mejoran el margen de fase del sistema.
La importancia del tercer efecto puede apreciarse comparando partes\(e\) y\(f\) de la Figura 13.37. Para la parte e (y todas las fotografías anteriores) se utilizó un condensador cerámico. El transitorio indicado en parte\(f\), con un tiempo de decaimiento aproximadamente tres veces el de la parte\(e\) y dentro del 60%. del valor analíticamente pronosticado, resulta cuando se utiliza un condensador de poliestireno de baja pérdida en lugar de la unidad cerámica. Esta comparación demuestra la necesidad de utilizar condensadores de baja pérdida en sistemas ligeramente amortiguados como osciladores.
También hay que señalar que, además de una amortiguación muy baja, este tipo de conexión puede conducir a niveles de señal desmesuradamente altos con posibilidad de saturación en ciertos puntos dentro del bucle. Dado que la frecuencia del timbre en la salida del sistema es mayor que la frecuencia de corte de la red de\(R_1-C_1\) paso bajo, la señal del LM301A será mayor que la señal de salida del sistema durante el período oscilatorio. De hecho, el nivel de señal pico en la salida del LM301A superó los 20 voltios pico a pico durante los transitorios mostrados en las figuras 13.37\(e\) y 13.37\(f\). Constantes de\(R_1-C_1\) tiempo más largas habrían resultado en saturación con la entrada de\(40-mV\) paso.
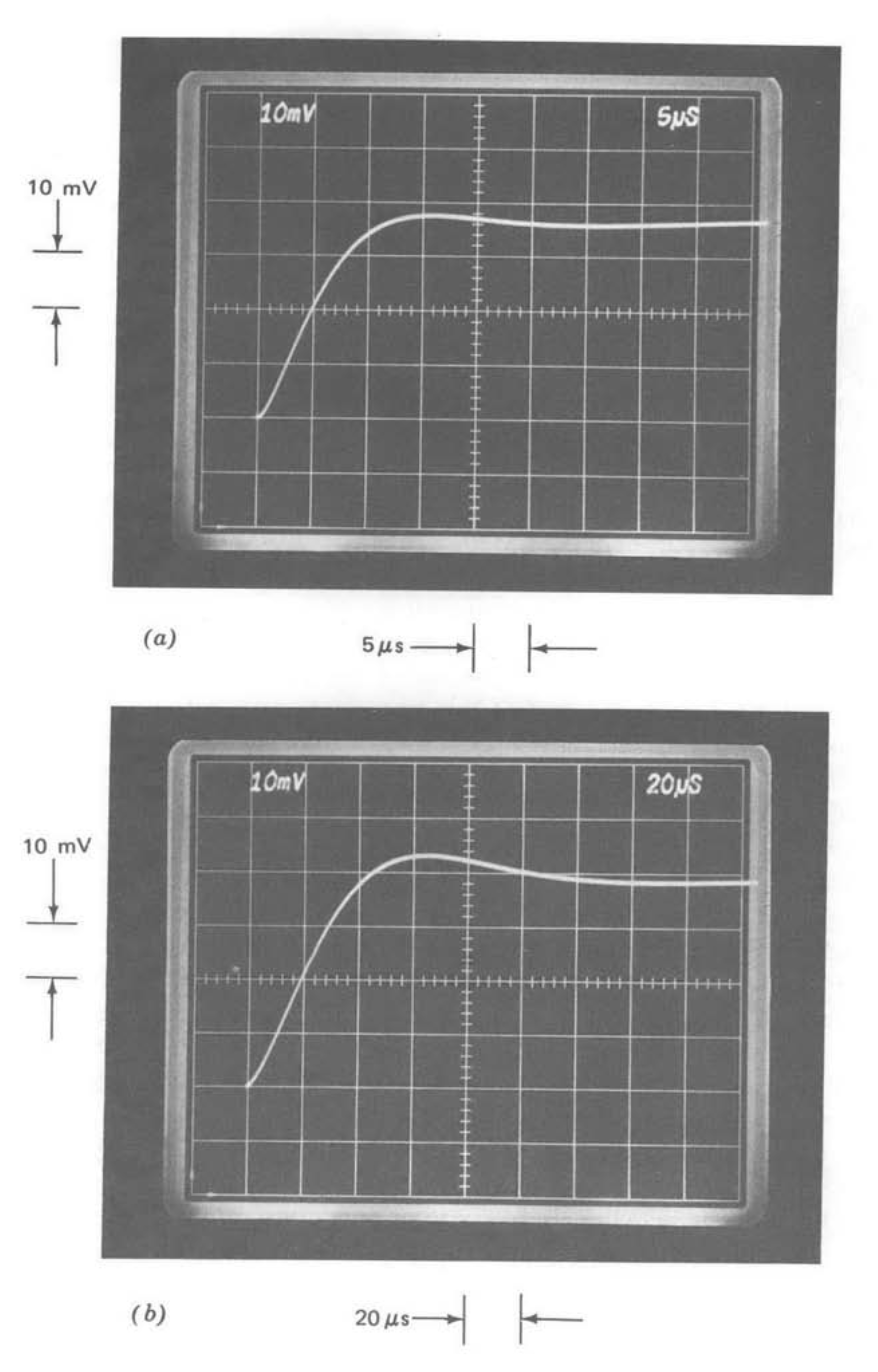
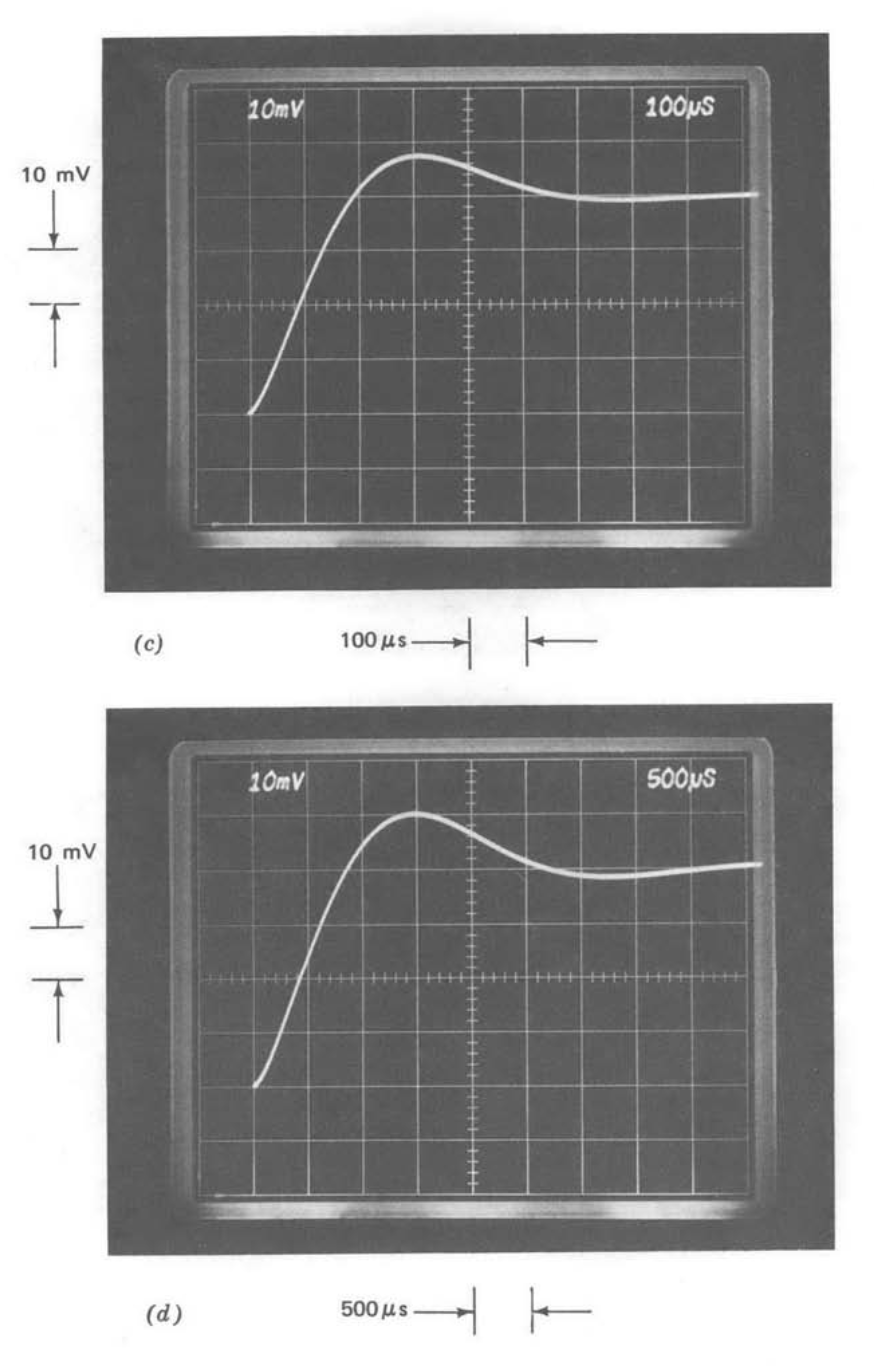
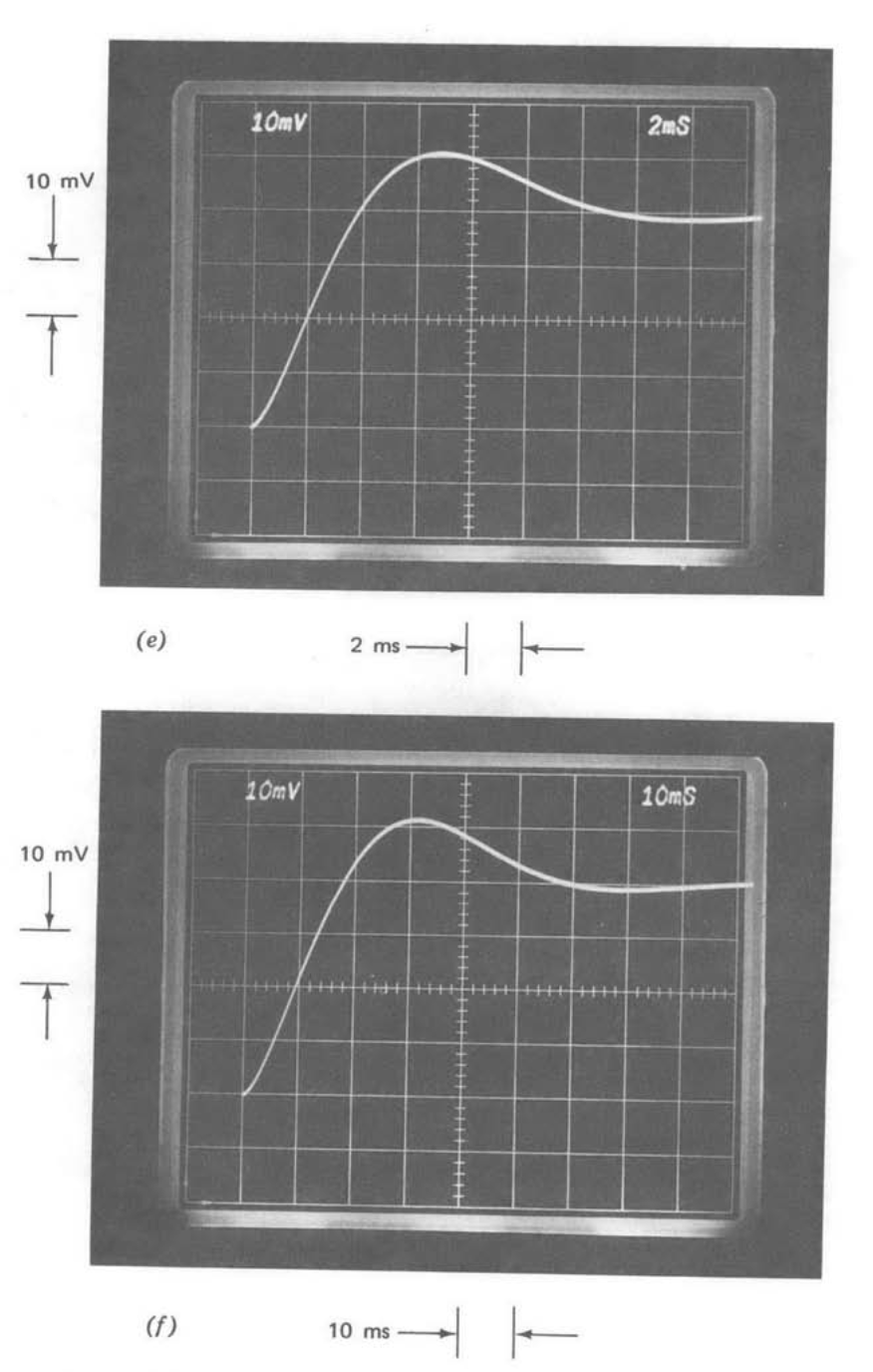
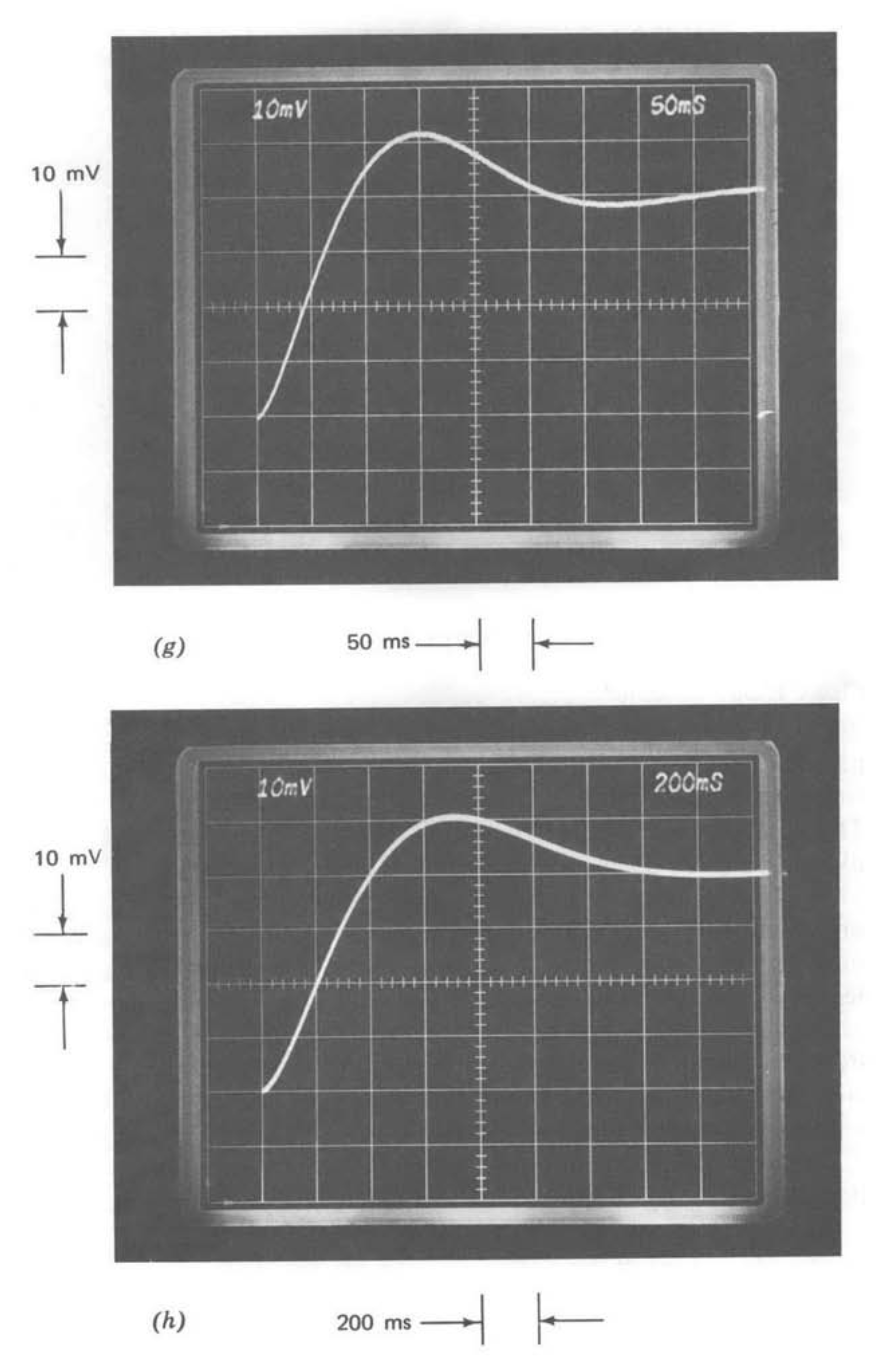
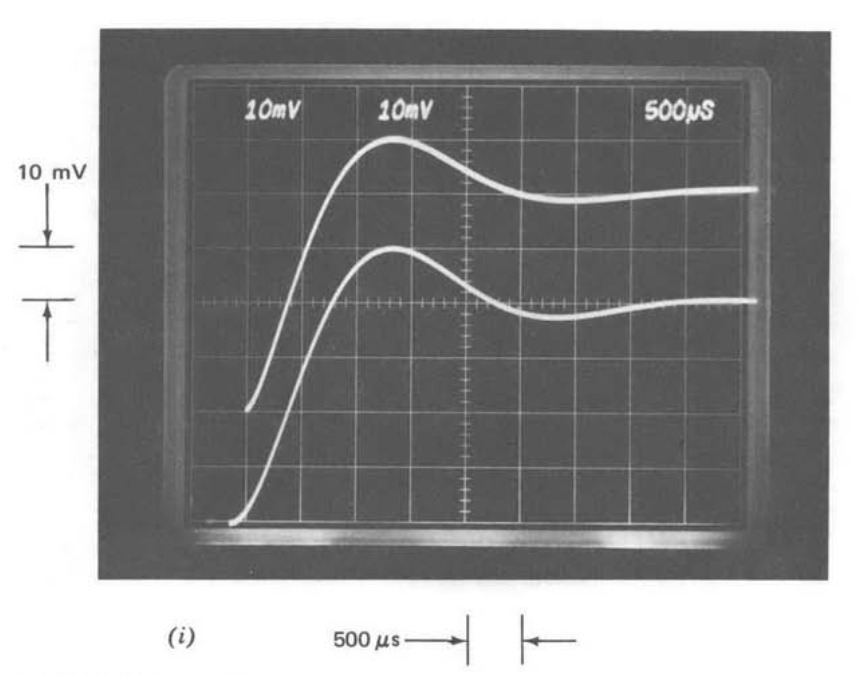
Figura 13.38 Respuesta escalonada del sistema con\(1/\sqrt{s}\) compensación en función de\(R_1 C_1\). (La amplitud del paso de entrada es\(40 \ mV\).) (\(a\))\(R_1 C_1 = 10\ \mu s\). (\(b\))\(R_1 C_1 = 100\ \mu s\). (\(c\))\(R_1 C_1 = 1\ ms\). (\(d\))\(R_1 C_1 = 10\ ms\). (\(e\))\(R_1 C_1 = 100\ ms\). (\(f\))\(R_1 C_1 = 1\text{ second}\). (\(g\))\(R_1 C_1 = 10\text{ seconds}\). (\(h\))\(R_1 C_1 = 100\text{ seconds}\). (\(i\)) Comparación de pieza\(d\) con sistema de segundo orden.
La Figura 13.38 muestra las respuestas del sistema compensadas con un rolloff del\(1/\sqrt{s}\) amplificador en función del\(R_1-C_1\) producto. Varias características analíticamente predecibles de este sistema son demostradas por estas respuestas. Dado que la magnitud de la transmisión de bucle cae como\(1/\omega^{3/2}\) en frecuencias por encima del polo de la\(R_1-C_1\) red y como\(1/\omega^{1/2}\) por debajo de la ubicación del polo, la frecuencia de cruce de bucle disminuye como\(1/R_1 C_1^{3/2}\). Un factor de 10 incremento en el\(R_1-C_1\) producto disminuye el crossover por un factor de\(10^{2/3} = 4.64\), mientras que un cambio de tres décadas en este producto cambia el crossover por dos décadas. Comparando, por ejemplo, partes\(c\) y\(f\) o\(d\) y\(g\) de la Figura 13.38 muestra que si bien las formas generales de estas respuestas son similares, las velocidades difieren en un factor de 100, reflejando el cambio en la frecuencia de cruce que se produce por un factor de cambio de 1000 en el \(R_1-C_1\)producto. Parte\(h\) es algo más rápida de lo previsto por la relación anterior nave porque, con un\(R_1-C_1\) valor de 100 segundos, el polo correspondiente se encuentra en frecuencias por debajo de la\(1/\sqrt{s}\) región de la compensación. (Recordemos que la constante de tiempo más larga en la red de compensación es de 33 segundos). El\(1/\sqrt{s}\) rolloff podría extenderse a frecuencias más bajas mediante el uso de más secciones en la red, pero se requerirían constantes de tiempo muy largas. La ganancia d-c del amplificador de aproximadamente\(10^5\) permitiría un\(1/\sqrt{s}\) vuelco de\(10^{-4}\) radianes por segundo a ganancia de unidad a\(10^6\) radianes por segundo.
Las frecuencias de cruce para partes\(a, b\), y\(c\) se localizan en factores de aproximadamente 2.16, 4.64 y 10, respectivamente, por encima de la frecuencia de ruptura de la\(R_1-C_1\) red. En consecuencia, el polo asociado al trabajo\(R_1-C_1\) neto produce algo menos que\(- 90^{\circ}\) del desplazamiento de fase en estos casos, con el resultado de que el margen de fase está por encima\(45^{\circ}\). Este efecto es insignificante en parte\(d\)\(h\), y las ligeras diferencias de amortiguación evidentes en estos transitorios surgen debido a la ondulación de fase de la red compensadora. La ondulación real es probablemente mayor que el valor\(3^{\circ}\) pico a pico predicho en la Figura 13.31 como consecuencia de las tolerancias de los componentes.
El transitorio mostrado en la Figura 13.38\(d\) resulta de un margen de fase de ap proximalmente\(45^{\circ}\) y una frecuencia de cruce de\(2.16 \times 10^3\) radianes por segundo. Las curvas de la Figura 4.26 indican que el sistema de segundo orden aproximado apropiado en este caso es uno con\(\zeta = 0.42\) y\(\omega_n = 2.5 \times 10^3\) radianes por segundo. Las dos respuestas mostradas en la Figura 13.38\(i\) comparan el transitorio mostrado en parte\(d\) con una respuesta de segundo orden utilizando los parámetros desarrollados con la ayuda de la Figura 4.26. Se invita al lector a adivinar cuál transitorio es cuál.
La notable similitud de estos dos transitorios es una demostración más de la validez de aproximar la respuesta de un sistema complejo con un transitorio mucho más simple. Tenga en cuenta que si bien el sistema real incluye 12 capacitores (excluidas las capacitancias del dispositivo internas al amplificador operacional), su respuesta transitoria puede aproximarse con precisión por la de un sistema de segundo orden.
Las respuestas transitorias mostradas en la Figura 13.38 y la Figura 13.36\(b\) ilustran cómo la\(1/\sqrt{s}\) compensación puede mantener una estabilidad relativa notablemente constante, ya que la ubicación de un polo del sistema varía a lo largo de ocho décadas de frecuencia. En realidad, valores aún más bajos para las frecuencias de\(R_1-C_1\) ruptura (Mientras que las constantes de\(R_1-C_1\) tiempo superiores a aproximadamente 10 segundos provocan alguna desviación de\(1/\sqrt{s}\) las características en las proximidades del\(R_1-C_1\) polo, el margen de fase está determinado por las características de la red a la frecuencia de cruce. El margen de fase del sistema permanecerá aproximadamente\(45^{\circ}\) por constantes de\(R_1-C_1\) tiempo tan grandes como\(10^4\) segundos.) arrojará resultados comparables, aunque las dificultades asociadas con la obtención de las constantes de tiempo muy largas requeridas y la fotografía de los transitorios lentos resultantes impidieron incluir respuestas adicionales.
Dado que este tipo de compensación elimina las oscilaciones de frecuencia relativamente alta de la señal de salida, los niveles de señal en la salida del LM301A son considerablemente más pequeños que cuando se usa compensación unipolar.
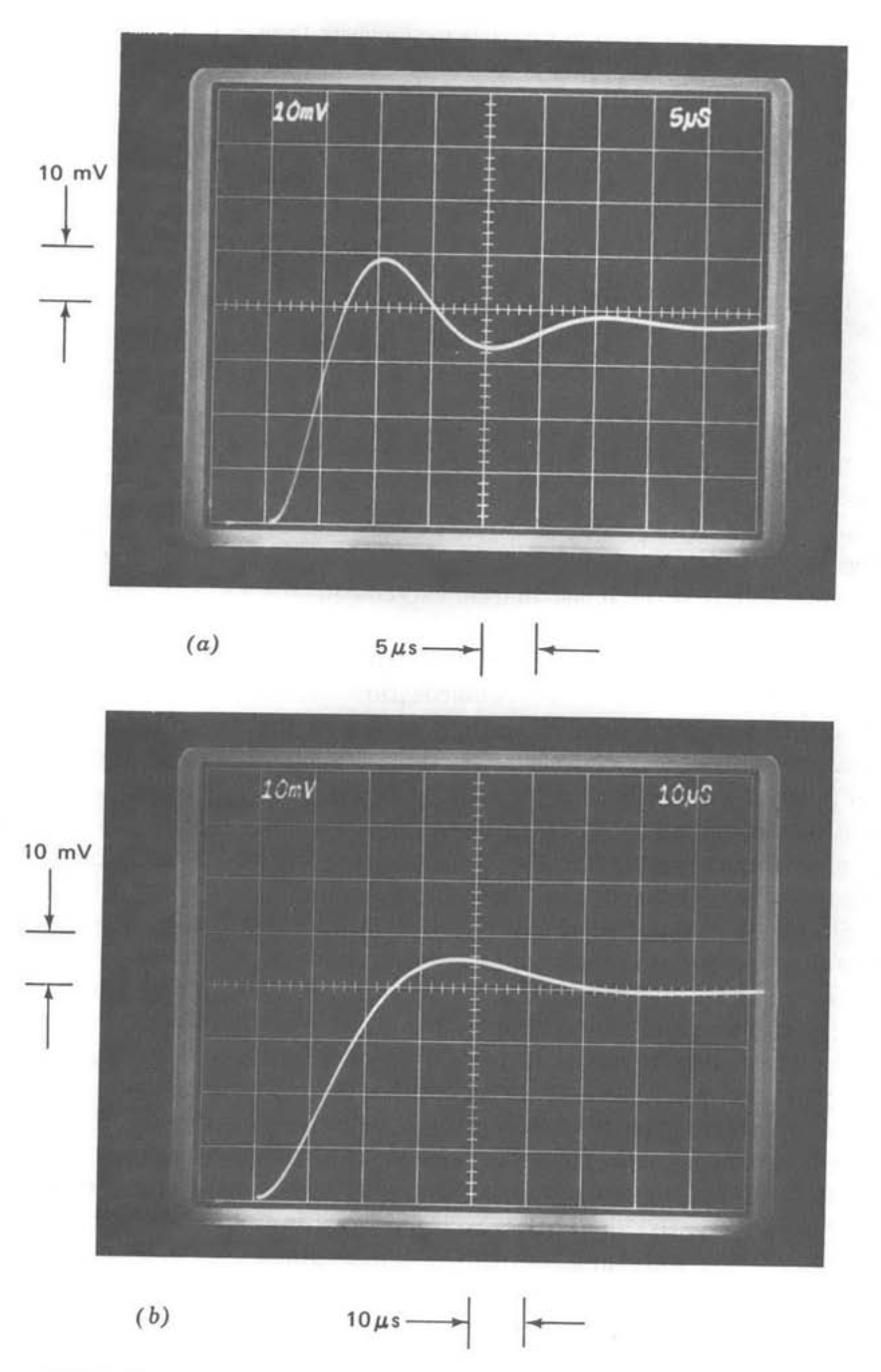
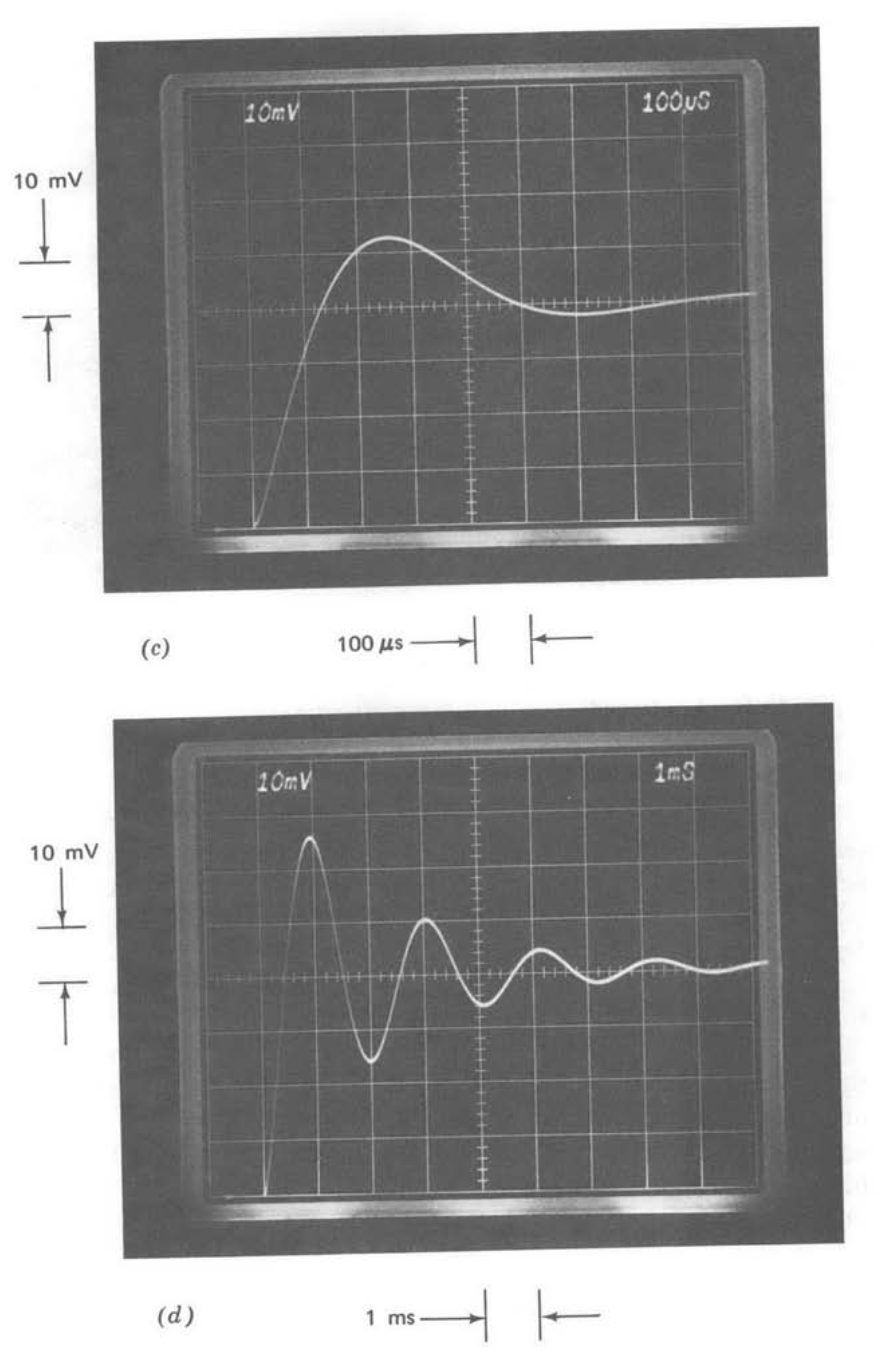
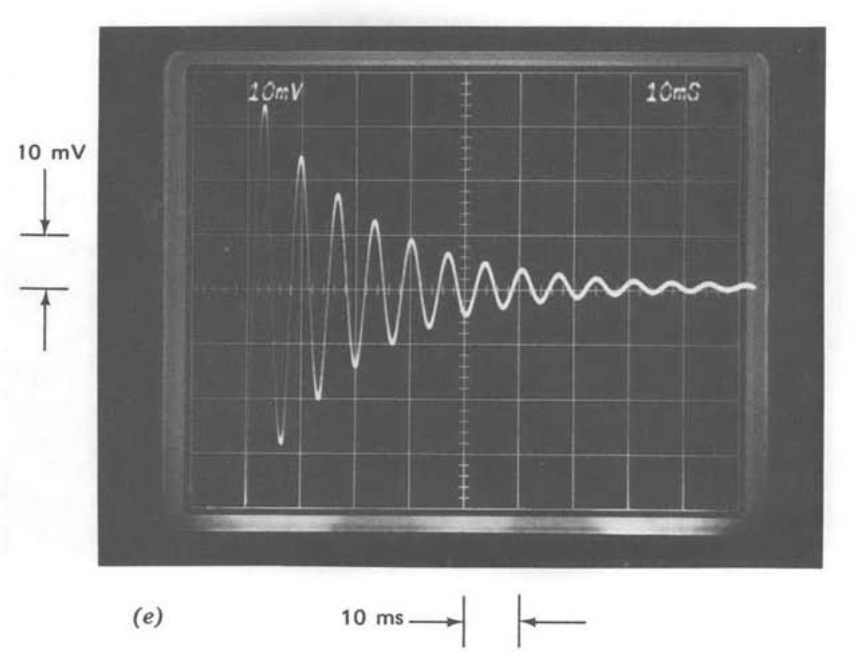
Figura 13.39 Respuesta escalonada para sistema con compensación de rolloff lento en función de\(R_1C_1\). (Amplitud de paso de entrada =\(40\ mV\).) (\(a\))\(R_1 C_1 = 10\ \mu s\). (\(b\)). \(R_1 C_1 = 100\ \mu s\). (\(c\))\(R_1 C_1 = 1 \ ms\). (\(d\))\(R_1 C_1 = 10\ ms\). (\(e\))\(R_1 C_1 = 100\ ms\).
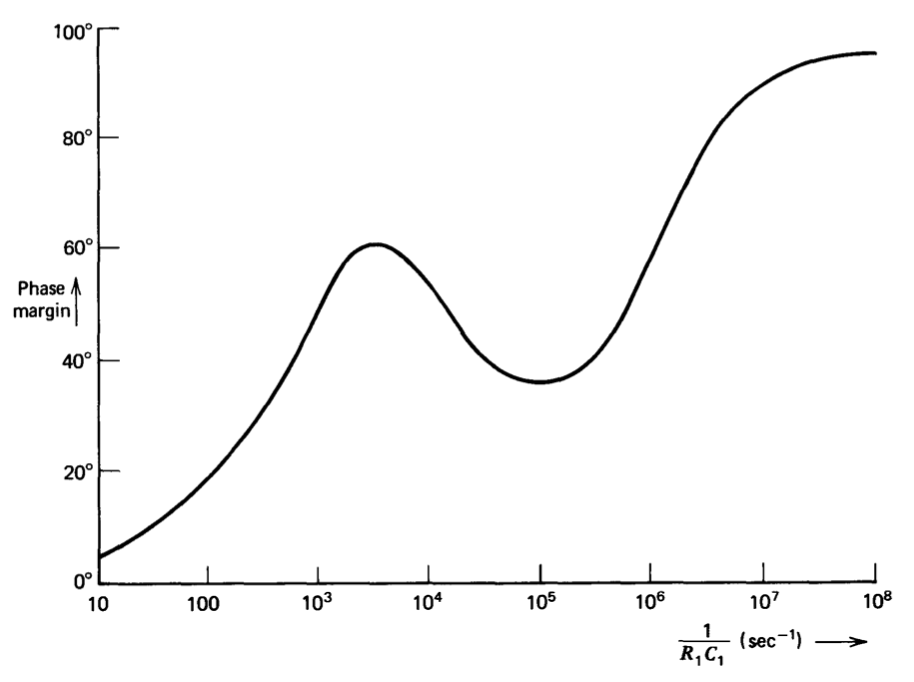
Figura 13.40 Margen de fase en función de\(1/R_1 C_1\) for\(L'' (s) = -[10^5 (10^{-4} s + 1)/s (10^{-5} s + 1)(R_1 C_1 s + 1)]\).
La respuesta escalonada del sistema con compensación de rolloff lento se indica en la Figura 13.39 para valores de\(R_1 C_1\) de\(10\ \mu s\) a\(100\ ms\). El punto importante ilustrado en estas fotografías es que la respuesta del sistema permanece moderadamente bien amortiguada para\(R_1-C_1\) productos tan grandes como\(1\ ms\), y que la amortiguación es superior a la del sistema utilizando compensación unipolar para cualquier\(R_1-C_1\) valor mostrado. El motivo se explica con la ayuda de la Figura 13.40, que es una gráfica del margen de fase en función de\(1/R_1 C_1\) para este sistema. Tenga en cuenta que el margen de fase excede\(30^{\circ}\) para cualquier valor de\(R_1C_1\) menos de aproximadamente\(3\ ms\).
Si bien la variación en el margen de fase con\(R_1C_1\) es mayor para este sistema que para el sistema con\(1/\sqrt{s}\) compensación, este tipo de compensación puede resultar en una estabilidad razonable ya que la ubicación del polo variable cambia desde más de tres décadas por debajo de la frecuencia de ganancia unitaria del amplificador hacia arriba. A cambio de la variación algo mayor en el margen de fase en función de la constante de\(R_1-C_1\) tiempo y un rango más limitado de este producto para una estabilidad aceptable, la complejidad de la red compensadora del amplificador se reduce de 22 a tres componentes.
Las redes simples de rolloff lento tipificadas por lo descrito anteriormente proporcionan una compensación útil en muchos sistemas prácticos de parámetros variables porque el rango de variación de parámetros rara vez es tan grande como el utilizado para ilustrar el rendimiento del sistema con\(1/\sqrt{s}\) compensación. Además, otros efectos pueden combinarse con la compensación de rolloff lento para aumentar su efectividad en sistemas reales. Considere el regulador de voltaje con una carga capacitiva arbitrariamente grande mencionado anteriormente como ejemplo de un sistema de parámetros variables. La característica de resistencia y disipación en serie de los condensadores electrolíticos agregan un cero al polo asociado con la carga capacitiva, y este cero puede ayudar a la compensación de vuelco lento en la estabilización de un regulador para un rango muy amplio de valores de carga-condensador.
También es evidente que agregar uno o más peldaños a la red compensadora puede aumentar el alcance de este tipo de compensación cuando sea necesario.
Compensación Feedforward
La compensación por retroalimentación se describió brevemente en la Sección 8.2.2. Este método, que difiere de manera fundamental de la compensación de bucle menor, implica acoplar capacitivamente la señal en el terminal de entrada inversora de un amplificador operacional a la entrada de la etapa final de ganancia de voltaje. Se supone que esta etapa final proporciona una inversión. El objetivo es eliminar la dinámica de todas las etapas excepto la etapa final de la función de transferencia de bucle abierto del amplificador en las proximidades de la frecuencia de ganancia unitaria.
Este enfoque, que se ha utilizado desde los días de los amplificadores operacionales de tubo de vacío, no está exento de limitaciones. Dado que solo las señales en el terminal de entrada inversora están acopladas a la etapa de salida, el amplificador de alimentación directa tiene un ancho de banda mucho menor para las señales aplicadas a su entrada no inversora y generalmente no se puede usar de manera efectiva en configuraciones no inversoras. (Ha habido varios intentos de diseñar amplificadores que utilizan trayectorias de alimentación directa duales a una etapa de salida diferencial. Una de las. dificultades con este enfoque surge de los desajustes en los caminos de avance. Una entrada de modo común da como resultado una señal de salida debido a tales desajustes. El tiempo requerido para que el error se asiente está relacionado con la dinámica del amplificador desviado y, por lo tanto, resultan colas de muy larga duración cuando estos amplificadores se usan diferencialmente.)
Otra dificultad es que el desplazamiento de fase de un amplificador de alimentación directa a menudo se acerca\(-180^{\circ}\) a frecuencias muy por debajo de su frecuencia de ganancia unitaria. En consecuencia, el rendimiento de señal grande puede ser pobre debido a que el amplificador está cerca de la estabilidad condicional. El desplazamiento de fase excesivo también hace que los amplificadores de avance sean relativamente intolerantes a la carga capacitiva.
La alimentación directa es normalmente más útil para amplificadores de tres o más etapas, y da como resultado una mejora relativamente pequeña del rendimiento para muchos diseños de dos etapas porque la primera etapa de estos amplificadores suele ser más rápida que el resto del amplificador. El LM101A (R. C. Dobkin, Feedforward Compensation Speeds Op Amp, Linear Brief 2, National Semiconductor Corporation.) es una excepción a esta generalidad. Recordemos que la etapa de entrada de este amplificador incluye transistores lateral-PNP. Debido a que los transistores NPN se utilizan para la ganancia de voltaje en la segunda etapa, la primera etapa representa el cuello de botella de ancho de banda para todo el amplificador. (La etapa de salida de ganancia unitaria de este amplificador también usa transistores PNP laterales. Sin embargo, la etapa de búfer tiene aproximadamente una ganancia de voltaje de señal pequeña de unidad incluso en frecuencias donde la ganancia de corriente de emisor común de los PNP laterales en esta etapa es cero. Por lo tanto, estos transistores no tienen el efecto dominante sobre el ancho de banda del amplificador que hacen los transistores de entrada). Dado que la entrada a la segunda etapa de amplificador está disponible como un terminal de compensación, la alimentación directa que evita la etapa de ancho de banda estrecha se puede implementar conectando un condensador desde el terminal de entrada de inversión del amplificador a este terminal de compensación.
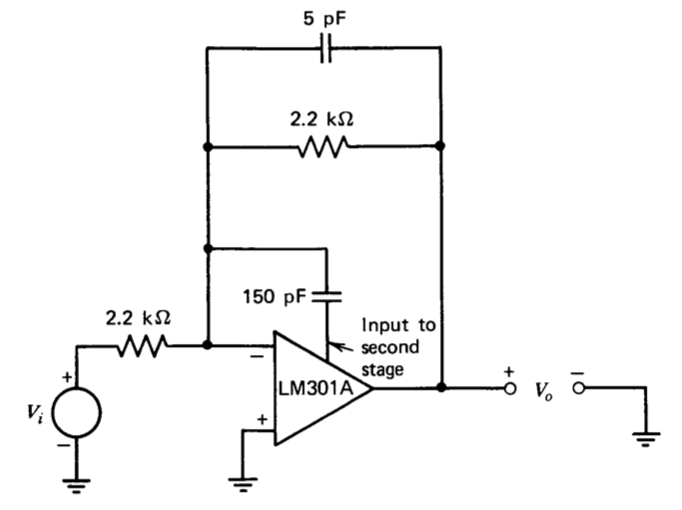
Figura 13.41 Inversor de ganancia unitaria con compensación de avance.
El LM301A se conectó como se muestra en la Figura 13.41. Las resistencias de bajo valor y el\(5-pF\) condensador se utilizan para reducir los efectos de la capacitancia de entrada del amplificador en la transmisión en bucle. El condensador de\(150-pF\) alimentación directa es el valor recomendado por National Semiconductor Corporation, aunque otros valores pueden dar un mejor rendimiento en algunas aplicaciones. Este valor del condensador se puede seleccionar para minimizar la señal en el terminal de entrada de inversión (que es proporcional al error entre la salida real e ideal) si se requiere un rendimiento óptimo.
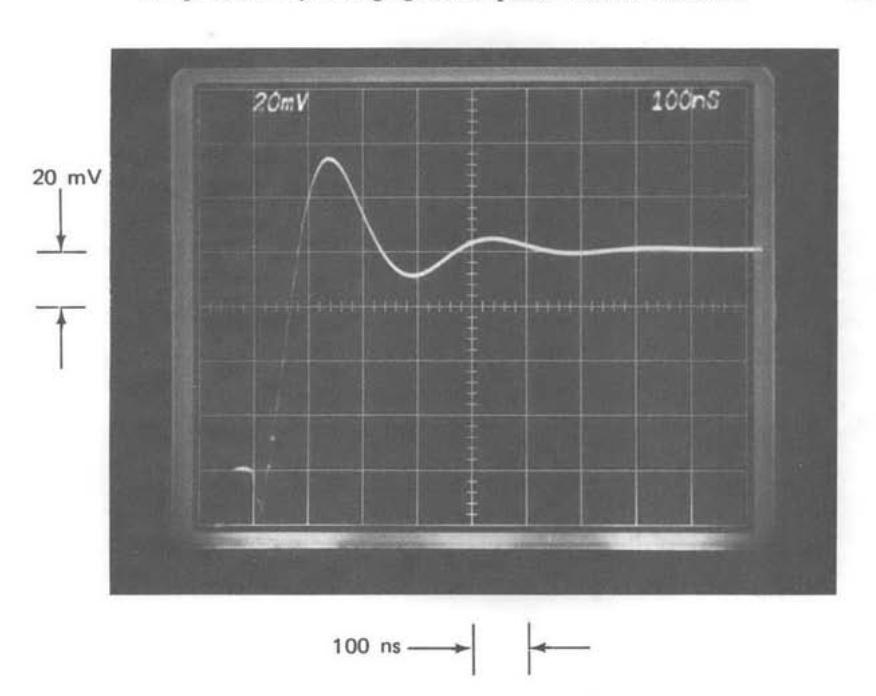
Figura 13.42 Respuesta escalonada del inversor de ganancia unitaria con compensación de avance. (La amplitud del paso de entrada es\(-80\ mV\).)
La respuesta escalonada de este inversor se muestra en la Figura 13.42. Hay un sobreimpulso sustancial evidente en la figura, así como algunos “dientes” en la porción ascendente de la forma de onda que probablemente estén al menos parcialmente relacionados con problemas de conexión a tierra de alta velocidad en la configuración de la prueba. El tiempo de subida de 10 a 90% del circuito es aproximadamente\(50\ ns\), o un factor de tres más rápido que el tiempo de subida más rápido obtenido con compensación de bucle menor (ver Figura 13.13\(b\)).
Compensación para mejorar el rendimiento de señal grande
La discusión en partes anteriores de este capítulo se ha centrado en cómo la compensación influye en el rendimiento de la región lineal de un amplificador operacional. La compensación utilizada en una conexión particular también tiene un profundo efecto en el rendimiento de señal grande del amplificador, particularmente la velocidad de respuesta o la tasa de tiempo máximo de cambio de la señal de salida y cómo la gracia se recupera completamente el amplificador de la sobrecarga.
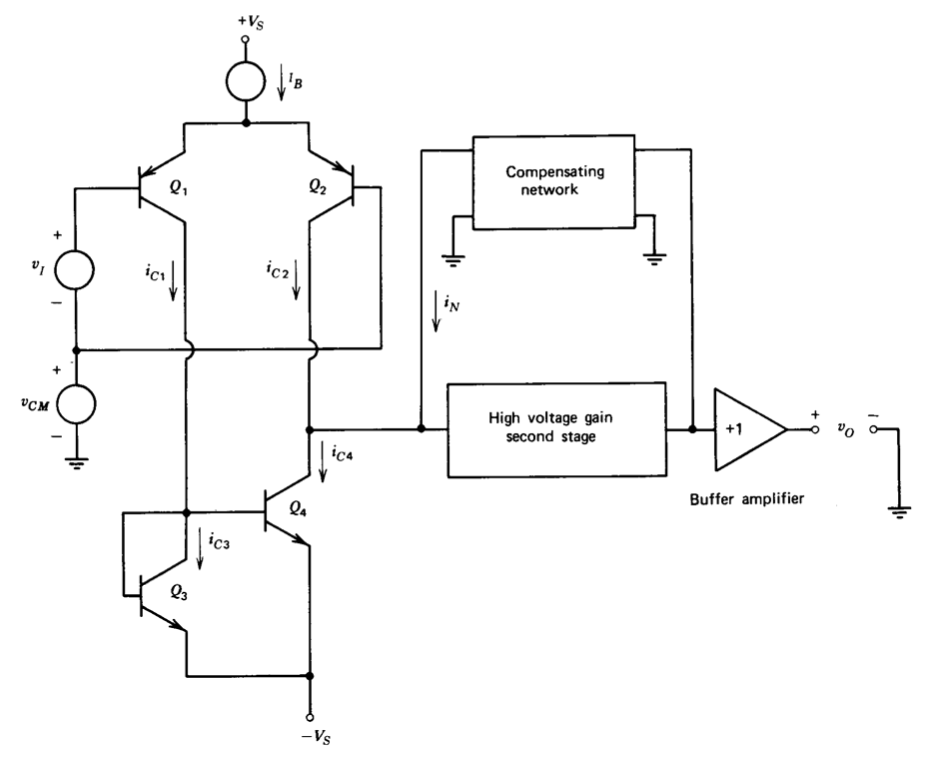
Figura 13.43 Modelo de amplificador operacional.
La representación simplificada del amplificador de dos etapas mostrada en la Figura 13.43 ilustra cómo la compensación puede determinar la región operativa lineal del amplificador. Este modelo, que incluye un repetidor de corriente, puede modificarse ligeramente para representar muchos amplificadores operativos de circuito integrado de dos etapas disponibles como el LM101A. La eliminación del repetidor de corriente, que no altera las características esenciales del siguiente argumento, da como resultado una topología adaptable a los diseños discretos que no incluyen estos transistores.
La clave para entender el rendimiento de este amplificador es reconocer que, con una segunda etapa adecuadamente diseñada, la corriente de entrada requerida por esta etapa es insignificante cuando se encuentra en su región lineal operativa. En consecuencia,
\[i_N = i_{C4} - i_{C2} \nonumber \]
Esta relación, aunada al hecho de que el cambio incremental de voltaje en la entrada de la segunda etapa también es pequeño bajo muchas condiciones de funcionamiento, es suficiente para determinar la función de transferencia de bucle abierto del amplificador en función de la red compensadora.
Dado que la segunda etapa normalmente opera a niveles de corriente grandes en comparación con los de la primera etapa, los límites de operación de la región lineal suelen ser determinados por la primera etapa. Tenga en cuenta que las corrientes de primera etapa están relacionadas con la corriente de polarización de reposo total de esta etapa\(I_B\), y el voltaje de entrada diferencial. Para la topología mostrada, la relación entre las corrientes relativas del colector de la etapa de entrada y el voltaje de entrada se vuelve altamente no lineal cuando el voltaje de entrada diferencial v excede aproximadamente\(kT/q\). A temperatura ambiente, por ejemplo, un\(+25-mV\) valor para\(v_I\) eleva la corriente del colector de\(Q_2\) un factor de 1.46 por encima de su nivel de reposo, mientras que los voltajes de entrada de\(60\ mV\) y\(120\ mV\) aumentan en factores de 1.82 y 1.98, respectivamente,\(i_{C2}\) por encima del valor de reposo.
Cuando se aplica un nivel diferencial de voltaje de\(100\ mV\) entrada superior al amplificador, la magnitud de la corriente\(i_{C4} - i_{C2}\) tendrá casi su valor máximo de\(I_B\). Independientemente de cuánto mayor sea la señal diferencial de entrada al amplificador, la corriente de la etapa de entrada y, por lo tanto, la corriente iN, permanece relativamente constante.
Incluso si se incluyen resistencias de emisor en serie (como están en algunos amplificadores a expensas de la deriva referida a la entrada del amplificador), o si se conectan más uniones en la trayectoria de señal de entrada como en el amplificador LM10A, la magnitud máxima de la corriente suministrada por la primera etapa está limitada por su nivel de sesgo. Dado que el valor de iN no puede exceder la corriente suministrada por la primera etapa (al menos si la segunda etapa permanece lineal), la tensión de salida no puede tener características que\(i_N\) provoquen superar un límite fijo. Si, por ejemplo,\(C_c\) se usa un condensador con un valor para compensación,
\[i_N \simeq C_c v_O \nonumber \]
donde el punto indica diferenciación de tiempo. Así, para los valores mostrados en la Figura 13.43, la magnitud máxima de\(\dot{v}_O\) es
\[|\dot{v}_O|_{\max} = \dfrac{I_B}{C_c} \label{eq13.3.46} \]
Una de las interrelaciones de diseño más restrictivas para un amplificador de dos etapas es que con compensación de condensador único y sin degeneración de emisor en la etapa de entrada, tanto la tasa de tiempo máximo de cambio de la tensión de salida como la frecuencia de ganancia unitaria del amplificador son directamente proporcionales a la primera- corriente de polarización de la etapa. Por lo tanto, los aumentos en la tasa de respuesta solo se pueden obtener junto con aumentos idénticos en la frecuencia de ganancia de unidad. Dado que las consideraciones de estabilidad generalmente limitan la frecuencia de ganancia unitaria, la tasa máxima de respuesta también está limitada.
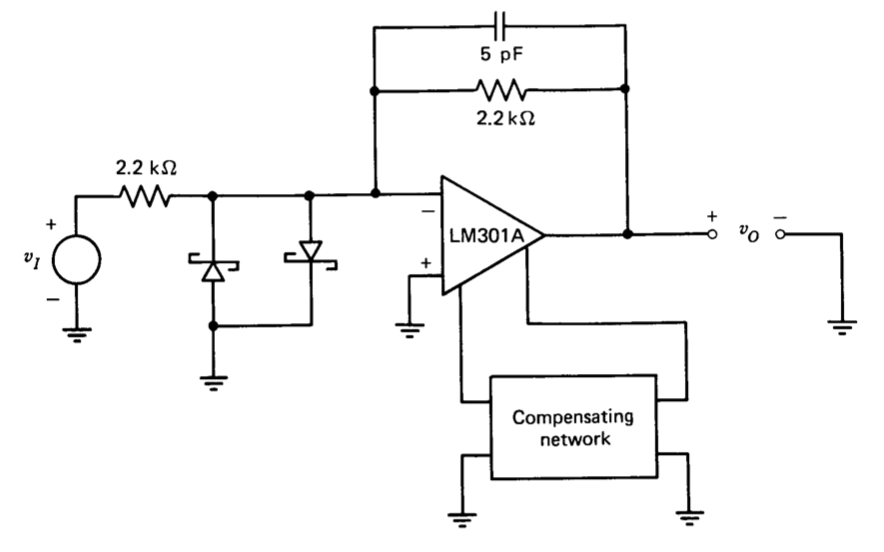
Figura 13.44 Inversor utilizado para evaluar la respuesta de señal grande.
El rendimiento de señal grande del amplificador operacional LM301A utilizado en todas las pruebas previas se demuestra utilizando la conexión que se muestra en la Figura 13.44. Esta conexión es idéntica al inversor utilizado con compensación de alimentación directa, excepto por la adición de diodos Schottky que funcionan como
una abrazadera de entrada. Si no se utilizara la sujeción, el voltaje a la inversión en puesta del amplificador se convertiría aproximadamente en la mitad de la magnitud de un cambio de voltaje de entrada de paso inmediatamente después del paso debido al acoplamiento resistivo directo. Este tipo de transitorio agregaría corrientes a la salida de la primera etapa debido a las señales alimentadas a través de las uniones colector a base de los transistores de entrada y debido a cambios transitorios en los niveles de corriente-fuente. Los diodos Schottky se utilizan con preferencia a los diodos de\(P-N\) unión de silicio habituales porque tienen características dinámicas superiores y porque su voltaje umbral de aproximadamente 0.3 voltios está más cerca del valor mínimo que garantiza una dirección completa de corriente de etapa de entrada para el LM301A.
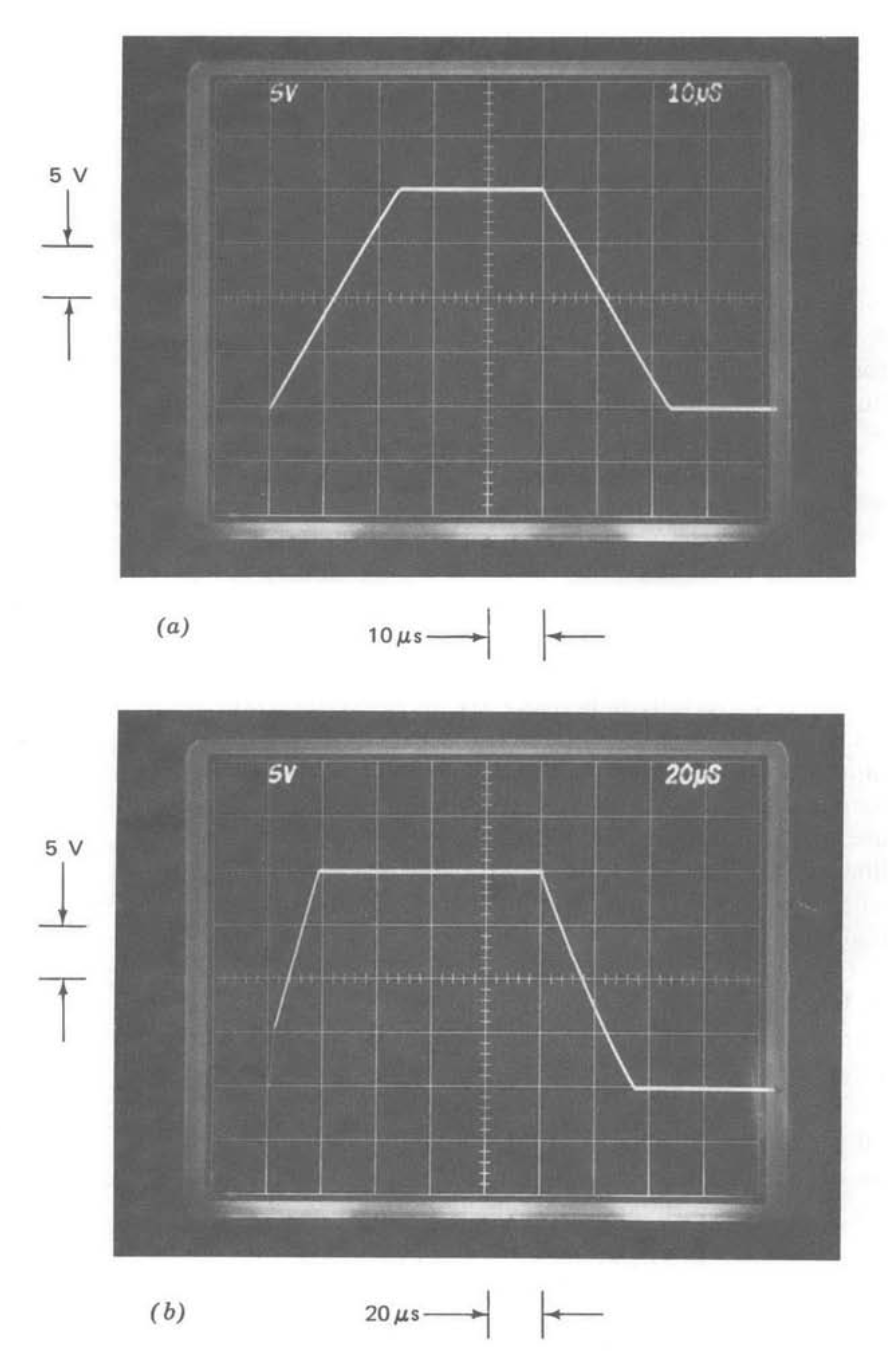
Figura 13.45 Respuesta de señal grande de LM301A con un condensador\(30-pF\) compensador. (La amplitud de onda cuadrada de entrada es de pico a pico de 20 voltios). (\(a\)) Inversor de ganancia unitaria. (\(b\)) Seguidor de voltaje de ganancia unitaria.
La respuesta de onda cuadrada del circuito de la Figura 13.44 con un condensador\(30-pF\) compensador se muestra en la Figura 13.45\(a\). Las tasas de rotación positiva y negativa son iguales y tienen una magnitud de aproximadamente 0.85 voltios por microsegundo. Tenga en cuenta que no hay sobreimpulso discernible ya que el voltaje de salida del amplificador alcanza el valor final, lo que indica que el amplificador con esta compensación se recupera rápida y limpiamente de la sobrecarga asociada con una señal de entrada de paso de 20 voltios.
El transitorio de la Figura 13.45\(b\) es la respuesta de un seguidor de voltaje de ganancia unitaria, compensado con un\(30-pF\) condensador, a la misma entrada. En este caso, la transición positiva tiene un cambio de escalón seguido de una pendiente de aproximadamente 0.8 voltios por microsegundo, mientras que la tasa de rotación de transición negativa es algo más lenta. La falta de simetría refleja corrientes adicionales de primera etapa relacionadas con señales de modo común que cambian rápidamente. La Figura 13.43 indica que una entrada de modo común aplicada a este tipo de amplificador fuerza los cambios de voltaje a través de las capacitancias de colector a base de los transistores de entrada y la fuente de corriente. La situación para el LM301A es algo peor que la representada en la Figura 13.43 debido a la ganancia proporcionada para polarizar las variaciones de la fuente de corriente por los PNP laterales utilizados en la etapa de entrada (ver Sección 10.4.1). El giro asimétrico que resulta cuando el amplificador se usa diferencialmente es la razón por la que se seleccionó la conexión del inversor para las siguientes demostraciones.
Un desarrollo anterior mostró que la velocidad de giro está relacionada con la corriente de polarización de la etapa de entrada y el tamaño del condensador de compensación con compensación unipolar. Resolviendo la ecuación\(\ref{eq13.3.46}\) para\(I_B\) usar valores asociados con la Figura 13.45\(a\) produce una corriente de polarización de 25.5\(\mu A\), con la mitad de esta corriente fluyendo a través de cada lado de la conexión diferencial de etapa de entrada en condiciones de reposo. La transconductancia de los transistores de etapa de entrada, con base en este valor estimado de corriente de reposo, es aproximadamente\(5 \times 10^{-4}\) mho.
Recordemos que la constante que relaciona la función de transferencia de bucle abierto de región lineal del LM301A con el recíproco de la admitancia de transferencia de red de compensación es la mitad de la transconductancia de los transis tores de entrada. El valor\(g_m/2\) de\(2.3 \times 10^{-4}\) mho determinado en Ecuación\(\ref{eq13.3.9}\) a partir de mediciones de región lineal está en excelente acuerdo con la estimación basada en la tasa de rotación.
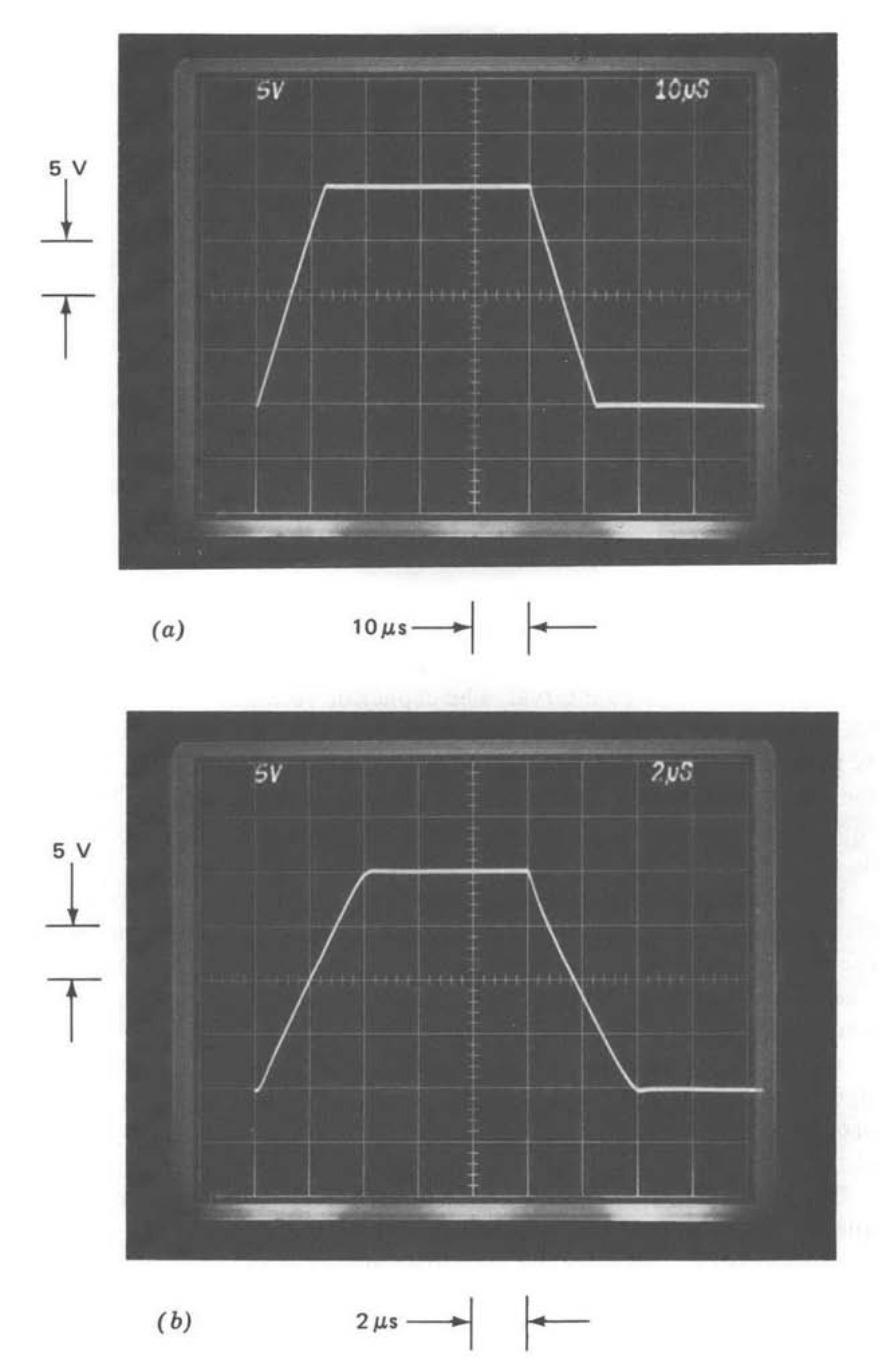
Figura 13.46 Velocidad de giro en función del condensador de compensación para el inversor de ganancia unitaria. (La amplitud de onda cuadrada de entrada es de pico a pico de 20 voltios). (\(a\))\(C_c = 15\ pF\). (\(b\))\(C_c = 5\ pF\) y compensación de retraso de entrada.
Dado que la velocidad de giro con compensación unipolar está inversamente relacionada con el tamaño del condensador de compensación, una manera simple de aumentar la velocidad de giro es disminuir este tamaño del condensador. El transitorio mostrado en la Figura 13.46\(a\) resulta con un condensador\(15-pF\) compensador, un valor que produce una estabilidad aceptable en la conexión del inversor unidad-ganancia. Como se anticipó, la tasa de rotación es el doble de la que se muestra en la Figura 13.45\(a\).
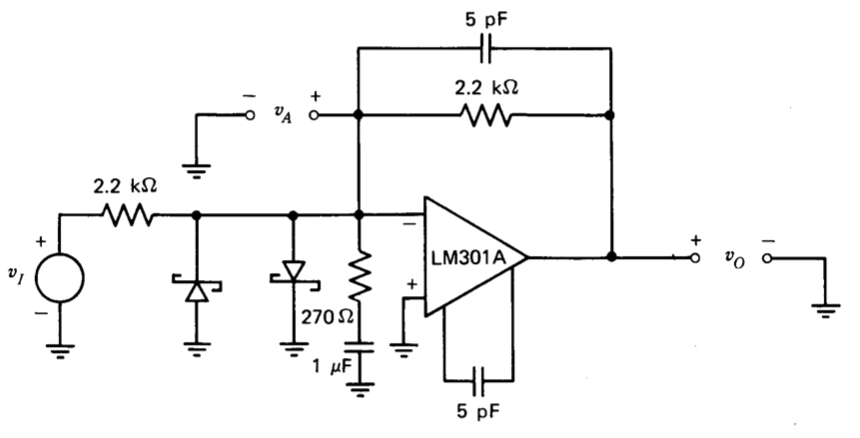
Figura 13.47 Inversor de ganancia unitaria con compensación de retardo de entrada.
Para mantener una estabilidad satisfactoria con valores menores de condensador compensador, es necesario bajar la transmisión de los elementos que rodean al amplificador. La conexión mostrada en la Figura 13.47 utiliza compensación de retardo de entrada para aumentar la atenuación desde la salida del amplificador hasta su entrada inversora a aproximadamente un factor de 10 en frecuencias intermedias y altas. Se demostró en la Sección 13.3.2 que el rendimiento de la región lineal bien amortiguado resulta con un condensador\(4.5-pF\) compensador cuando la red que rodea al amplificador proporciona este grado de atenuación.
La respuesta de la Figura 13.46\(b\) resulta con un condensador\(5-pF\) compensador y compensación de retardo de entrada como se muestra en la Figura 13.47. La tasa de respuesta aumenta al valor de 5 voltios por microsegundo predicho por Ecuación\(\ref{eq13.3.46}\) con este valor para\(C_c\).
El condensador grande se utiliza en la red de retardo para mover la región de roll-off de dos polos que resulta de la compensación de retraso muy por debajo del cruce. Esta ubicación mejora la recuperación de la sobrecarga que resulta durante el período de giro porque se requieren grandes cambios de ganancia (en un sentido de función de descripción) para reducir el cruce a un valor que resulte en un margen de fase bajo. La transición limpia del desempeño de región no lineal a lineal que se muestra en la Figura 13.46\(b\) indica el éxito de esta precaución.
Cabe señalar que el equivalente de señal grande de la cola de región lineal asociada a la compensación de retraso existe con esta conexión, aunque el factor de escala utilizado en la Figura 13.46 no\(b\) es lo suficientemente sensible como para mostrar este efecto. El voltaje\(v_A\) alcanza su valor de sujeción de aproximadamente 0.3 voltios para el período de giro de 4\(\mu s\) después de una transición de 20 voltios en la entrada. En consecuencia, el\(1-\mu F\) condensador se carga aproximadamente\(4\ mV\) durante este intervalo sobrecargado. El voltaje del condensador se amplifica por un factor de\(2.2\ k\Omega /270 \Omega \simeq 8\), con el resultado de que el voltaje de salida está en error\(32\ mV\) inmediatamente después de la transición. El tiempo de decaimiento asociado al error es\(270\ \Omega \times 1\ \mu F = 270\ \mu s\). Tenga en cuenta que aumentar el valor del condensador de red retardada disminuye la amplitud de la cola no lineal pero aumenta su duración.
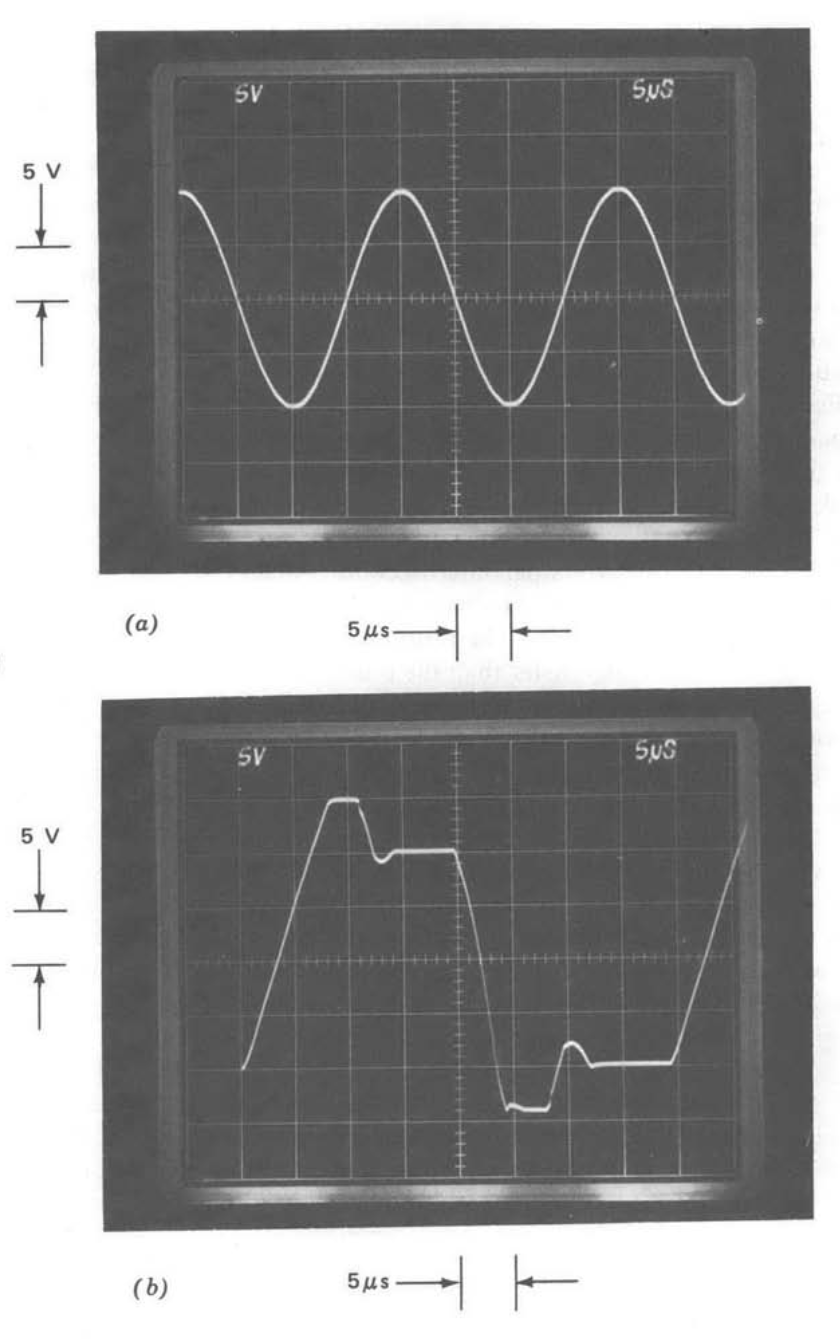
Figura 13.48 Rendimiento de señal grande del inversor de ganancia unitaria con compensación bipolar. (\(a\)) Entrada de onda sinusoidal. (\(b\)) Entrada de onda cuadrada.
Podríamos sospechar que la compensación bipolar podría mejorar la tasa de respuesta porque la topología de red que se muestra en la Figura 13.19 tiene la propiedad de que el valor de estado estacionario de la corriente\(i_N\) es cero para cualquier rampa de magnitud de\(v_N\). La salida que utiliza una red compensadora\(30\ pF-15\ k\Omega-30\ pF\) bipolar (los valores indicados anteriormente en la Figura 13.21) con la conexión del inversor se muestra en la Figura 13.48\(a\) para una señal de entrada de 20 voltios pico a pico y 50 kHz de onda sinusoidal. La velocidad máxima de respuesta demostrada en esta fotografía es ap proximalmente 3.1 voltios por microsegundo, un valor aproximadamente el doble que se obtiene con un solo condensador\(15-pF\) compensador.
Desafortunadamente, el gran cambio de fase negativo cercano a la frecuencia de cruce que resulta de la compensación bipolar resulta desastroso cuando ocurre la saturación porque el sistema se acerca a las condiciones necesarias para la estabilidad condicional. La mala recuperación de la sobrecarga que resulta con excitación de onda cuadrada de señal grande se ilustra en la Figura 13.48\(b\). Las uniones colector a base de los transistores de segunda etapa están polarizadas hacia delante durante parte del ciclo debido al sobreimpulso, y el almacenamiento de carga resultante retrasa aún más la recuperación de la sobrecarga.
Es de interés pasajero observar que el circuito que utiliza compensación bipolar exhibe un fenómeno llamado resonancia de salto. Si la frecuencia de la sinusoide pico a pico de 20 voltios se eleva ligeramente por encima del valor de 50 kHz utilizado en la Figura 13.48\(a\), la señal de salida se distorsiona severamente. Los aumentos adicionales en la frecuencia de excitación dan como resultado un salto abrupto a un nuevo modo de limitación con una señal de salida reconociblemente diferente (aunque igualmente distorsionada). El proceso presenta histéresis, ya que es necesario bajar la frecuencia de excitación mensurablemente por debajo del valor de salto original para restablecer el primer tipo de señal de salida no lineal. Una de las pocas virtudes conocidas de la resonancia de salto es que puede servir de base para problemas académicos muy difíciles en el análisis avanzado de la función descriptora. (G. J. Thaler y M. P. Pastel, Análisis y Diseño de Sistemas de Control de Retroalimentación no Lineal, McGraw-Hill, Nueva York, 1962, pp. 221-225. )
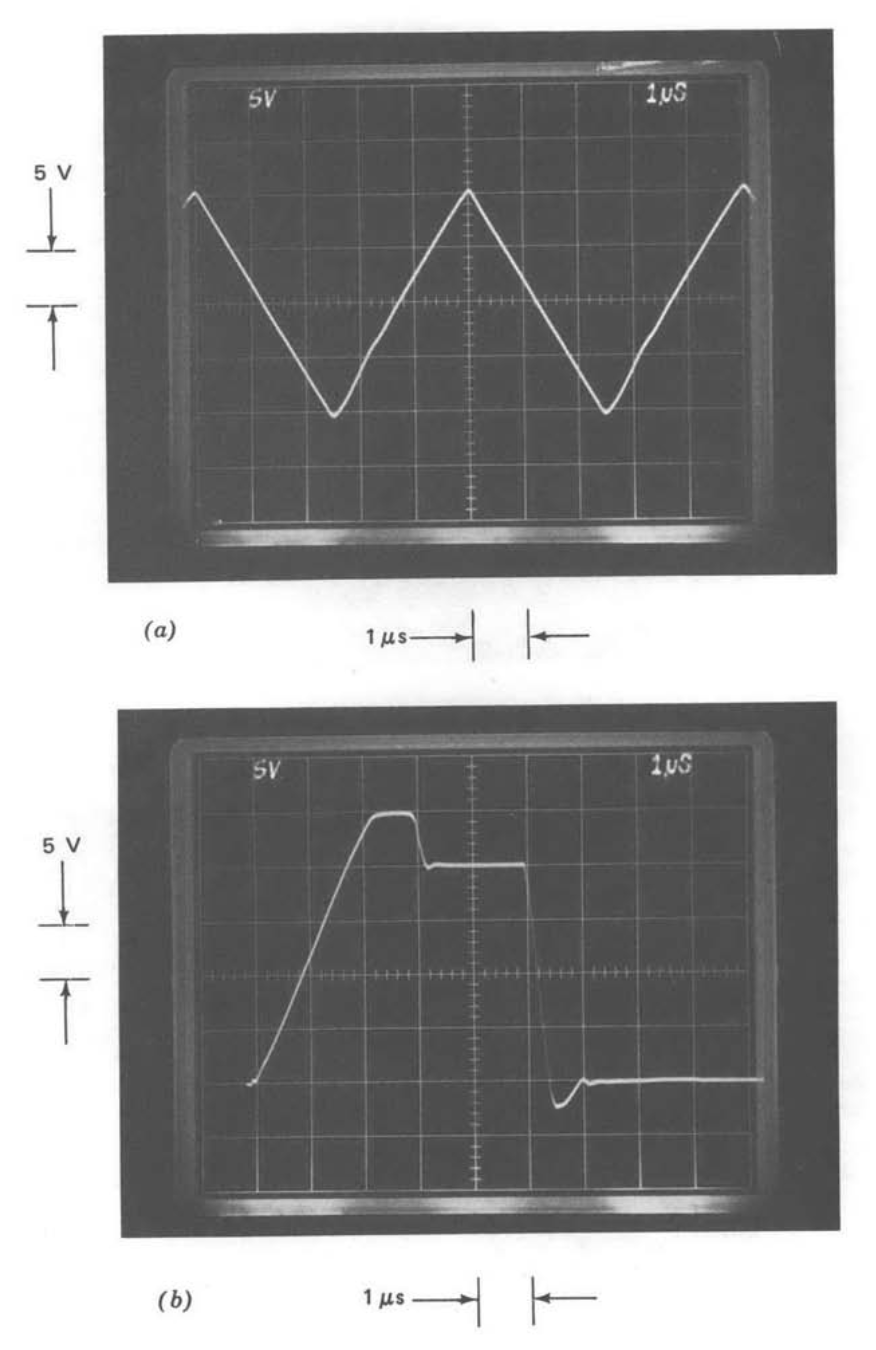
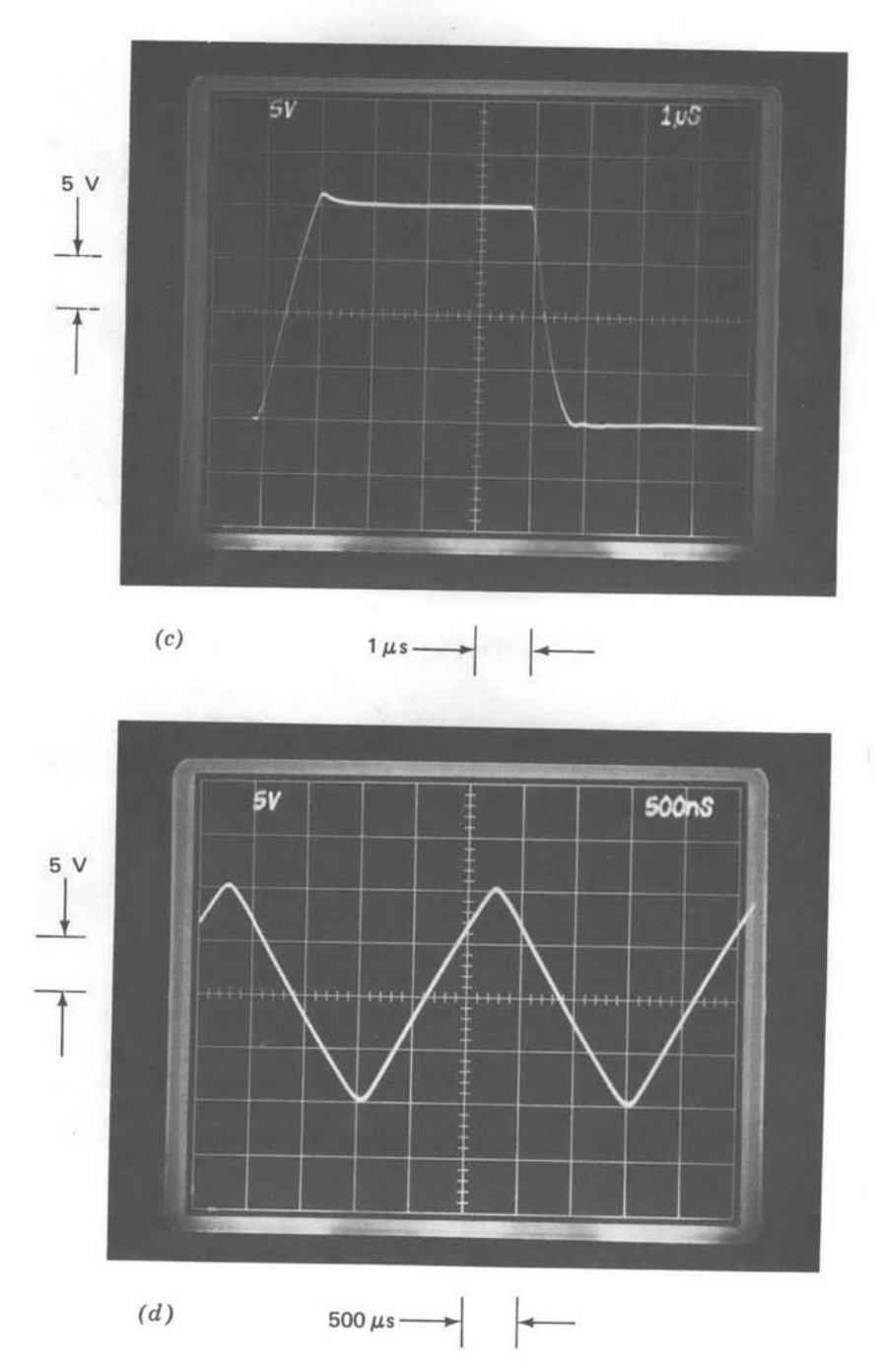
Figura 13.49 Velocidad de giro del inversor con compensación de avance. (\(a\)) Entrada de onda de triángulo. (\(b\)) Entrada de onda cuadrada. (\(c\)) Entrada de onda cuadrada con mayor corriente de polarización de segunda etapa. (\(d\)) Entrada de onda triangular con mayor corriente de segunda etapa.
La compensación de avance da como resultado un alto valor para la tasa de respuesta porque se elimina la retroalimentación capacitiva alrededor de la segunda etapa. La respuesta del inversor con compensación de\(150-pF\) alimentación directa a una onda triangular de 200 kHz de pico a pico de 20 voltios se muestra en la Figura 13.49\(a\). Si bien en esta fotografía se evidencia cierta distorsión, la cantidad no es excesiva considerando que se logra una tasa de rotación de 8 voltios por microsegundo. La respuesta de onda cuadrada mostrada en la Figura 13.49b indica problemas similares a los asociados con la compensación bipolar. La respuesta también indica que la tasa de respuesta negativa es sustancialmente más rápida que la tasa de respuesta positiva con esta compensación. La razón de la asimetría es que con la compensación de alimentación directa, la velocidad de respuesta del amplificador está limitada por la corriente disponible para cargar el nodo en la salida de la segunda etapa (el colector de\(Q_{10}\) la Figura 10.19). La corriente para cargar este nodo en una dirección negativa se deriva de\(Q_{10}\), y corrientes relativamente grandes son posibles de este dispositivo. Por el contrario, la tasa de giro positiva se establece por las corrientes de polarización relativamente más bajas disponibles. La manera de mejorar la simetría es aumentar la corriente de polarización del colector de\(Q_{10}\). Si bien este aumento podría lograrse con una fuente de corriente externa aplicada a través de un terminal de compensación, se dispone de un método más simple debido a la relación entre la tensión en el colector\(Q_{10}\) y la tensión de salida del amplificador. El desplazamiento de nivel en la etapa de búfer eleva el voltaje de salida un potencial de diodo por encima del voltaje del colector de\(Q_{10}\) en ausencia de carga. Si se conecta una resistencia entre la salida del amplificador y el terminal de compensación en la salida de la segunda etapa, la resistencia actuará como una fuente de corriente porque el voltaje a través de él es “bootstrapped” por el amplificador de búfer. Además, el cambio de nivel en el búfer es de la polaridad correcta para mejorar la simetría de velocidad de respuesta cuando se usa la resistencia.
La respuesta de onda cuadrada de la Figura 13.49\(c\) ilustra el rendimiento del inversor con compensación de alimentación directa cuando se conecta una\(1-k\Omega\) resistencia desde la salida del amplificador al lado del colector de la segunda etapa. La tasa de rotación positiva se incrementa a aproximadamente 20 voltios por microsegundo. Además, las características de recuperación de sobrecarga mejoran, probablemente como resultado de una mejor dinámica de segunda etapa a corrientes de polarización más altas. La respuesta a una onda triangular de 400 kHz con compensación de alimentación directa y mayor corriente de polarización se ilustra en la Figura 13.49\(d\). Esta señal está razonablemente libre de distorsión y tiene una velocidad de respuesta de 16 voltios por microsegundo.
Si bien el método de combinar la compensación de alimentación directa con niveles operativos plegados no se recomienda necesariamente para el uso rutinario, sí ilustra la flexibilidad que a menudo acompaña a la disponibilidad de terminales de compensación externos. En este caso, es posible elevar el rendimiento dinámico de un amplificador de circuito integrado económico de propósito general a niveles generalmente asociados con unidades de banda ancha más especializadas mediante conexiones adecuadas a los terminales de compensación.
Resumen
El material presentado anteriormente en esta sección ha dado alguna indicación de la potencia y versatilidad asociada con el uso de compensación de bucle menor para amplificadores operativos de dos etapas. Debemos reconocer que los méritos relativos de diversas formas de funciones de transferencia de bucle abierto siguen siendo los mismos independientemente de los detalles específicos de un sistema de retroalimentación en particular. Por ejemplo, la retroalimentación tacométrica a menudo se usa alrededor de una combinación de motor-amplificador para formar un bucle menor incluido como parte de un servomecanismo. Este tipo de compensación es completamente análogo al uso de un condensador de retroalimentación de bucle menor para la compensación unipolar. De manera similar, si se sigue a un tacómetro con una red de paso alto, se obtiene una compensación de bucle menor de dos polos. También hay que señalar que en muchos casos se pueden generar funciones de transferencia similares a las obtenidas con compensación de bucle menor a través de la compensación de ruta directa.
Si bien las redes de compensación se han ilustrado en conexiones que utilizan redes de retroalimentación de bucle principal relativamente simples, esta limitación es innecesaria. Existen muchos sistemas sofisticados que utilizan amplificadores operacionales para proporcionar ganancia y generar funciones de transferencia compensadoras para otros elementos complejos. Las funciones de transferencia necesarias a menudo se pueden realizar con retroalimentación de bucle principal alrededor del amplificador operacional, o compensando el amplificador para que tenga una función de transferencia de bucle abierto de la forma requerida. El primer enfoque da como resultado funciones de transferencia algo más estables ya que está relativamente menos influenciado por los parámetros del amplificador, mientras que el último a menudo requiere menos componentes, particularmente cuando es necesaria una conexión de entrada diferencial.
Se enfatiza que se requiere una buena cantidad de experiencia con un amplificador particular para obtener el máximo rendimiento de éste en aplicaciones exigentes. Cantidades como el límite superior a la frecuencia de cruce para un funcionamiento confiable y estable y la función de transferencia de bucle abierto no compensada se determinan mejor experimentalmente. Además, muchos amplificadores tienen peculiaridades que, una vez entendidas, pueden explotarse para mejorar el rendimiento. La conexión de alimentación directa utilizada con el LM101A es un ejemplo. Otro ejemplo es que el rendimiento de ciertos amplificadores se mejora cuando la red compensadora (o alguna parte de la compensación) se conecta a la salida del amplificador completo en lugar de a la salida de la etapa de alta ganancia porque se reducen los efectos de carga por la red y porque más del amplificador está incluido dentro del bucle menor. El tiempo que un diseñador de sistemas pasa entendiendo las sutilezas de un amplificador en particular es bien recompensado en términos del rendimiento que puede obtener del dispositivo.
En el Cuadro 13.1 se resumen las características importantes de los distintos tipos de compensación que se tratan en esta sección. Esta tabla indica las funciones de transferencia de bucle abierto obtenidas con las diferentes compensaciones. Las líneas continuas representan regiones donde la función de transferencia es controlada por la red compensadora, mientras que las líneas punteadas se utilizan cuando dominan las características del amplificador no compensadas. También se muestran las redes de retroalimentación de bucle menor utilizadas para obtener las diversas funciones de transferencia de amplificadores de dos etapas. Se incluyen comentarios que indican ventajas y desventajas relativas.
Cuadro 13.1 Implementación y Efectos de Diversos Tipos de Compensación
| Un Polo | |
| Función de transferencia | Red |
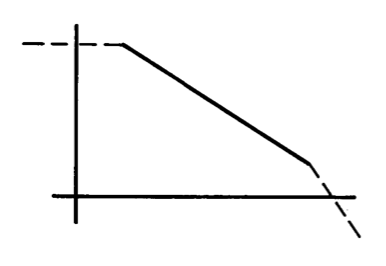 |
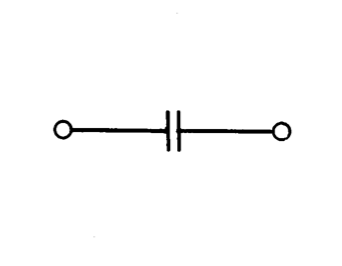 |
|
Compensación conservadora de propósito general para sistemas con retroalimentación y carga independientes de la frecuencia. Cambiar el valor del condensador optimiza el ancho de banda en función de la atenuación proporcionada por la red de retroalimentación. Velocidad de giro inversamente proporcional al tamaño del condensador. |
|
| Dos polos | |
| Función de transferencia | Red |
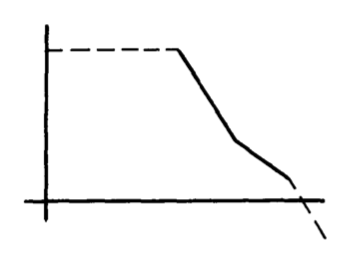 |
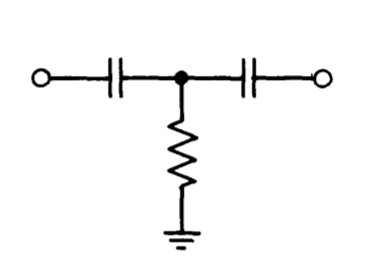 |
|
Mejora de la desensitividad y menores coeficientes de error en comparación con sistemas unipolares con frecuencias de cruce idénticas. Los parámetros de bucle deben seleccionarse para asegurar que el cruce se produzca en la\(1/s\) región de las características para una estabilidad adecuada. La inestabilidad generalmente resulta con carga capacitiva o redes de retroalimentación de bucle principal de paso bajo. Mala recuperación por sobrecarga. |
|
| Con Cero | |
| Función de transferencia | Red |
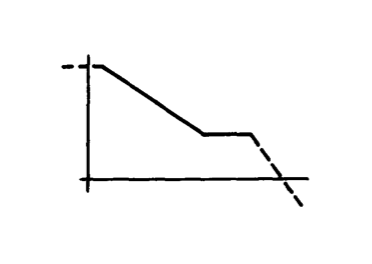 |
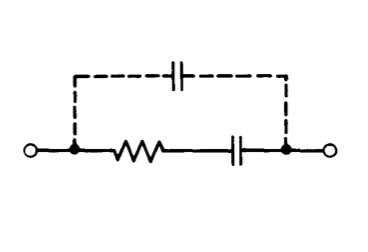 |
|
El cero se utiliza para compensar los efectos del polo asociados con la carga o la red de retroalimentación, y debe ubicarse como una función de este polo. El lazo mayor se vuelve inestable si se elimina el polo. Un condensador de pequeño valor, indicado con líneas punteadas, mejora la estabilidad de bucle menor. |
|
| Rolloff lento | |
| Función de transferencia | Red |
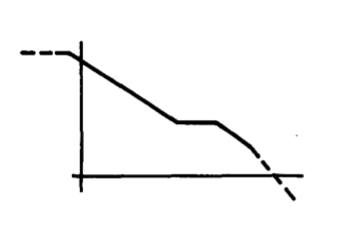 |
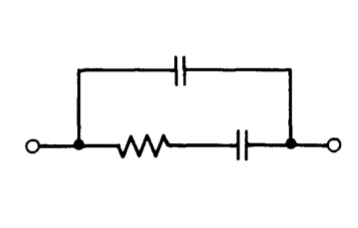 |
|
Útil para sistemas con un polo de transmisión de bucle adicional en una ubicación incierta. Agregar más peldaños a la red de escalera aumenta el rango de frecuencias sobre las cuales se puede ubicar el polo adicional y resulta en una mayor uniformidad de las características de cambio de fase. Tiempo de asentamiento prolongado en comparación con la compensación unipolar cuando el polo de transmisión de bucle adicional no está presente. |
|
| Feedforward | |
| Función de transferencia | Tipología |
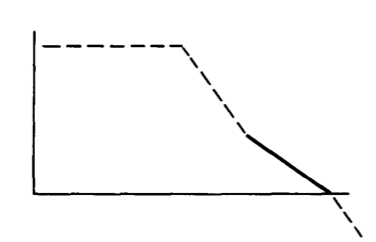 |
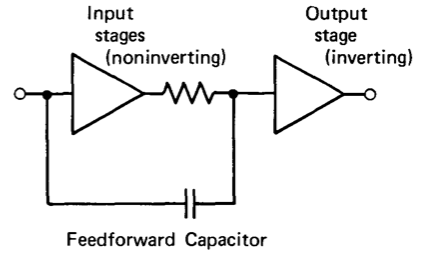 |
|
Ancho de banda más alto. Más útil cuando el ancho de banda de la primera etapa o etapas es menor que el del resto del amplificador. Puede resultar en una mejora sustancial de la tasa de respuesta. Limita el amplificador para usar solo en conexiones invertidas. Los valores y resultados dependen críticamente de detalles específicos del rendimiento del amplificador. Sensible a la carga capacitiva u otras fuentes de desplazamiento de fase de transmisión de bucle negativo. |
|
Ejercicio\(\PageIndex{1}\)
Un amplificador operacional está disponible con una función de transferencia de bucle abierto fija y descargada
\[a(s) \simeq \dfrac{10^5}{10^{-2} s + 1}.\nonumber \]
Este amplificador se va a utilizar como un inversor de ganancia de unidad. Un condensador de carga agrega un polo\(s = -10^6\text{ sec}^{-1}\) a la función de transferencia de bucle abierto descargada. Compensar esta configuración con una red principal de entrada de modo que su magnitud de transmisión de bucle sea inversamente proporcional a la frecuencia desde bajas frecuencias hasta un factor de cinco más allá de la frecuencia de cruce. Elija los valores de los elementos para maximizar la frecuencia de cruce sujeto a esta restricción. Puede asumir una alta impedancia de entrada para el amplificador.
Ejercicio\(\PageIndex{2}\)
Diseñe una red de retardo de entrada y una red de lead-lag de entrada para compensar el inversor cargado capacitivamente descrito en Ejercicio\(\PageIndex{1}\). Maximice la frecuencia de cruce para sus diseños sujeto a la restricción de que la transmisión de bucle es inversamente proporcional a la frecuencia en un rango de frecuencia que se extiende desde un factor de cinco por debajo hasta un factor de cinco por encima de la frecuencia de cruce.
Ejercicio\(\PageIndex{3}\)
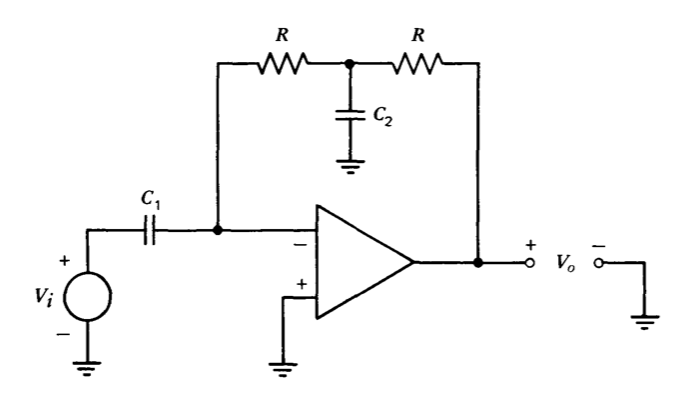
Figura 13.50 Diferenciador doble.
Un amplificador operacional está conectado como se muestra en la Figura 13.50 en un intento de obtener una función de transferencia de bucle cerrado
\[\dfrac{V_o (s)}{V_i (s)} = -s (0.1s + 1)\nonumber \]
Determinar los valores de los elementos que producen una ganancia ideal de bucle cerrado dada por esta expresión.
Las mediciones indican que la función de transferencia de bucle abierto del amplificador es aproximadamente de un solo polo y que la magnitud de la función de transferencia está\(10^4\) en\(\omega = 10^3\) radianes por segundo. Huelga decir que la configuración mostrada en la Figura 13.50 es irremediablemente inestable con este amplificador.
Encuentre modificaciones topológicas apropiadas que estabilicen el sistema (sin cambiar el amplificador) y darán como resultado una función de transferencia de bucle cerrado que se aproxime a la deseada a frecuencias por debajo de 100 radianes por segundo.
Ejercicio\(\PageIndex{4}\)
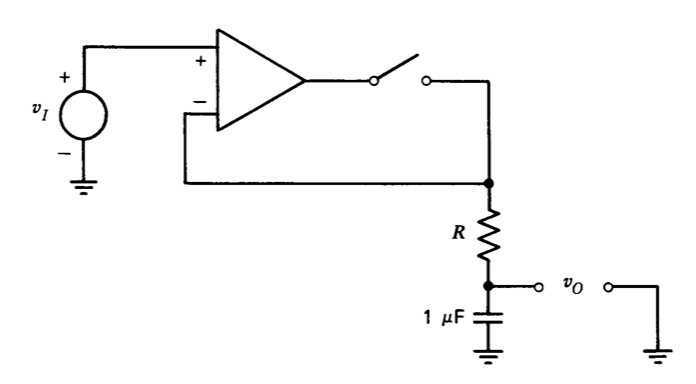
Figura 13.51 Circuito de muestreo y retención.
Se construye un circuito de muestreo y retención como se muestra en la Figura 13.51. La función de transferencia de bucle abierto descargada del amplificador es
\[a(s) \simeq \dfrac{10^6}{(0.1s + 1)(10^{-7} s + 1)}\nonumber \]
La suma de la resistencia de salida de bucle abierto del amplificador y la resistencia de encendido del interruptor es\(100\ \Omega\).
(a) Con\(R = 0\), ¿este circuito es estable en el modo de muestreo (interruptor cerrado)?
(b) Determinar un valor para\(R\) que resulte aproximadamente\(45^{\circ}\) del margen de fase en el modo muestral.
c) Estimar el tiempo requerido\(v_O (t)\) para alcanzar el 1% del valor final tras el inicio del muestreo cuando\(b\) se utilice el valor de\(R\) determinado en parte. Se puede suponer que el condensador está inicialmente descargado,\(v_I\) es decir, invariante en el tiempo, y que el circuito permanece lineal durante el transitorio.
Ejercicio\(\PageIndex{5}\)
Un amplificador operacional compensado externamente que utiliza retroalimentación de bucle menor para generar una función de transferencia aproximada de bucle abierto
\[a(s) \simeq \dfrac{2 \times 10^{-4}}{Y_c (s)}\nonumber \]
está disponible. El amplificador está conectado como un seguidor de voltaje de ganancia unitaria. El contenido espectral de las señales de entrada anticipadas es tal que un ancho de banda de bucle cerrado superior a\(10^6\) radianes por segundo degrada el rendimiento de ruido de la conexión. Determinar un elemento compensador que dará como resultado una función de transferencia de bucle cerrado
\[A(s) \simeq \dfrac{1}{10^{-6} s + 1} \nonumber \]
para la conexión del seguidor de voltaje.
Ejercicio\(\PageIndex{6}\)
Un amplificador operacional del tipo descrito en Ejercicio\(\PageIndex{5}\) está conectado en el circuito logarítmico mostrado en la Figura 13.9\(a\). La evaluación experimental muestra que esta conexión será aceptablemente estable si la frecuencia de cruce de bucle está limitada a 1 MHz. Determinar un elemento compensador que asegure la estabilidad para cualquier nivel de señal de entrada entre 0 y +10 voltios. Estimar el tiempo requerido para que la señal de salida incremental del circuito se asiente al 1% del valor final cuando se aplica un pequeño cambio de paso en el voltaje de entrada en un punto de operación\(V_I = 0.1\) voltios.
Ejercicio\(\PageIndex{7}\)
Un amplificador operacional de dos etapas tiene una ganancia de bucle abierto d-c de\(10^6\) y es aceptablemente estable en conexiones que implican retroalimentación independiente de la frecuencia siempre que se seleccione una compensación que limite la frecuencia de cruce a 1 MHz. Este amplificador se utiliza como un inversor de ganancia unitaria para amplificar sinusoides de 10 kHz, y un objetivo principal de diseño es tener las señales de entrada y salida del inversor exactamente\(180^{\circ}\) desfasadas. Discutir los méritos relativos de la compensación unipolar y bipolar en este
aplicación. Indicar también el efecto que tienen los dos tipos de compensación sobre la magnitud de la función de transferencia de bucle cerrado a 10 kHz.
Ejercicio\(\PageIndex{8}\)
La función de transferencia de bucle abierto no compensada de un amplificador de dos etapas es
\[a(s) = \dfrac{10^5}{(10^{-4} s + 1)(10^{-5} s + 1)(5 \times 10^{-8} s + 1)^2} \nonumber \]
Los dos polos de menor frecuencia son el resultado de dinámicas que pueden ser modificadas por compensación, mientras que la ubicación del par de polos de mayor frecuencia es independiente de la compensación que se utilice.
El amplificador es compensado y conectado para una ganancia no inversora de 10. Se puede suponer que la compensación utilizada no causa una carga significativa del bucle menor. Esta conexión de bucle cerrado se excita con una rampa de entrada que tiene una pendiente de\(10^4\) voltios por segundo. Se observa la señal de entrada diferencial aplicada al amplificador, y se encuentra que después de un transitorio de arranque, el valor de estado estacionario de la señal es\(10\ mV\).
(a) Determinar una aproximación unipolar a la función de transferencia de bucle abierto del amplificador.
(b) Refina tu estimación de la parte a, aprovechando toda la información que tengas disponible sobre el amplificador.
(c) Suponiendo que este amplificador descrito es un LM301A, ¿qué elemento compensador se utiliza?
d) Sugerir una compensación alternativa que dé como resultado la misma frecuencia de cruce que la obtenida con la compensación descrita, un margen de\(60^{\circ}\) fase superior y un error de rampa en estado estacionario esencialmente cero. Determinar los valores de los elementos que implementan la compensación requerida para un LM301A.
Ejercicio\(\PageIndex{9}\)
El material discutido en relación con la Figura 13.24 indicó que el error de estado estacionario de una conexión de amplificador operacional de bucle cerrado en respuesta a una rampa puede reducirse a niveles insignificantes mediante el uso de compensación de dos polos. Una extensión de esta línea de razonamiento implica que si se usa compensación tripolar, el error de estado estacionario será casi cero para la excitación parabólica. Las consideraciones del sistema lineal muestran que la estabilidad es posible si se combinan dos ceros con un rolloff de tres polos. Por ejemplo, una transmisión en bucle
\[L(s) = -\dfrac{10^{16} (10^{-5} s + 1)^2}{s^3} \nonumber \]
tiene aproximadamente margen\(80^{\circ}\) de fase en su frecuencia de cruce.
Encuentre una topología de red de compensación que pueda usarse junto con amplificadores compensados de bucle menor para proporcionar este tipo general de función de transferencia de bucle abierto. Discuta las dificultades prácticas que anticipa con esta forma de función de transferencia.
Ejercicio\(\PageIndex{10}\)
Un amplificador operacional de dos etapas que usa compensación de bucle menor se carga con un condensador que agrega un polo\(s = -10^6\text{ sec}^{-1}\) a la función de transferencia de bucle abierto descargada del amplificador. La función de transferencia de bucle abierto deseada, incluidos los efectos de carga es
\[a(s) \simeq \dfrac{2 \times 10^{11} (5 \times 10^{-6} s + 1)}{s^2} \nonumber \]
Encuentre una topología de red compensadora que pueda utilizarse para efectuar esta forma de compensación. Determinar los valores de los elementos apropiados asumiendo que la transconductancia efectiva de la etapa de entrada del amplificador operacional utilizado es\(2 \times 10^{-4}\) mho.
Ejercicio\(\PageIndex{11}\)
Un amplificador operacional de dos etapas está conectado como un diferenciador inversor con una resistencia de retroalimentación de\(100\ k\Omega\) y un condensador de entrada de\(1\ \mu F\). ¿Qué tipo de red compensadora de bucle menor se debe usar para estabilizar esta configuración? Determinar los valores de los elementos que dan como resultado una frecuencia de cruce predicha de\(10^4\) radianes por segundo con un valor de\(2 \times 10^{-4}\) mho para la transconductancia en etapa de entrada.
Cuando se intenta este tipo de compensación usando un amplificador operacional LM301A, la estabilidad de bucle menor es inaceptable, y es necesario derivar los terminales de compensación con un\(3-pF\) condensador además de la red desarrollada anteriormente para un rendimiento satisfactorio. Describir el efecto de esta modificación en el rendimiento de bucle cerrado.
Ejercicio\(\PageIndex{12}\)
Una cierta aplicación requiere un amplificador operacional con una función de transferencia de bucle abierto próximo ap
\[a(s) \simeq \dfrac{10^4}{s^{2/3}} \nonumber \]
Encuentre una red compensadora que pueda usarse junto con un LM301A para aproximar esta función de transferencia. El desplazamiento de fase de la función de transferencia de aproximación debe estar en un\(- 60^{\circ} \pm 5^{\circ}\) rango de frecuencia de 1 radián por segundo a\(10^6\) radianes por segundo.