
3.3: Conceptos básicos
- Page ID
- 87842

Al ver la utilidad de la retroalimentación negativa, sería bueno que pudiéramos aplicar el concepto a nuestros circuitos electrónicos. La idea básica es bastante simple, de verdad. Lo que haremos es muestrear una pieza de la señal de salida, y luego agregarla a la señal de entrada fuera de fase (es decir, restarla). Al hacerlo, el circuito verá la diferencia entre la entrada y la salida. Si la señal de salida es demasiado grande, la diferencia será negativa. Por el contrario, la señal de diferencia será positiva si la salida es demasiado pequeña. Esta señal se multiplica entonces por la ganancia del circuito y cancela el error de salida. Así, el circuito se presentará con los errores no deseados de una manera que obligará a la salida a compensar (moverse en sentido contrario). Este proceso se realiza continuamente; los únicos retardos de tiempo involucrados son los retardos de propagación de los circuitos utilizados.
Debido a que la señal de salida muestreada se resta efectivamente de la señal de entrada, la retroalimentación negativa a veces se denomina retroalimentación degenerativa o destructiva. Esta resta se puede lograr de diversas maneras. Un amplificador diferencial está hecho a medida para esta tarea porque tiene una entrada inversora y una entrada no inversora. (Nota: Si el error se presenta en fase, el circuito magnifica los errores y los resultados de retroalimentación positiva).
Para ver un ejemplo de cómo funciona esto, refiérase a la Figura\(\PageIndex{1}\). El triángulo representa un circuito amplificador. Tiene una ganancia de\(A\). La señal de salida también se presenta a la entrada de la red de retroalimentación representada por la caja. Esta red escala la señal de salida por un factor,\(\beta\). La red de retroalimentación va de muy simple a compleja. Puede contener varias resistencias, capacitores, diodos y lo que no, o puede ser tan simple como una sola pieza de cable. En cualquier caso, esta señal de salida escalada se conoce como la señal de retroalimentación y se resta efectivamente de la señal de entrada. Esta combinación, llamada señal de error, se alimenta luego al amplificador donde se potencia y aparece en la salida. El proceso se repite así para siempre (o al menos hasta que se apague la alimentación).
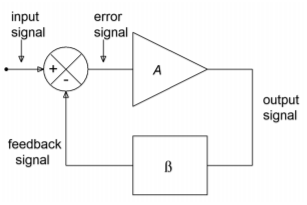
Figura\(\PageIndex{1}\): Retroalimentación negativa.
Supongamos que por alguna razón (quizás un cambio de temperatura) la ganancia del amplificador iba a subir. Esto debería hacer que la señal de salida aumente en un porcentaje similar, pero no lo hace. He aquí por qué: A medida que la señal de salida intenta subir, la señal de retroalimentación rastrea con ella. Ahora que hay una señal de retroalimentación más grande, la señal de error se volverá más pequeña (recuerde, error = entrada - retroalimentación). Esta señal más pequeña se multiplica por la ganancia del amplificador, produciendo así una señal de salida más pequeña que compensa casi por completo el cambio positivo original. Tenga en cuenta que si la señal de salida fuera demasiado pequeña, la señal de error aumentaría, llevando así la salida de nuevo a un nivel normal. Cuando todo está funcionando bien, las señales de retroalimentación y entrada son casi del mismo tamaño. (En realidad, la señal de retroalimentación es algo menor en magnitud.)
3.3.1: Los efectos de la retroalimentación negativa
Además de suavizar las anomalías de ganancia, la retroalimentación negativa puede reducir el efecto de las no linealidades del dispositivo, produciendo así una reducción en las formas estáticas de distorsión como THD (Total Harmonic Distortion). Básicamente, estas no linealidades pueden verse como una cadena de pequeños errores de ganancia. Como tales, producen señales de error apropiadas y son compensadas de la manera anterior. La retroalimentación negativa también puede aumentar el ancho de banda del sistema. Puede aumentar la frecuencia de corte superior\(f_2\) y disminuir la frecuencia de corte inferior\(f_1\) (suponiendo que el sistema tenga una). Además, podemos ejercer control sobre las impedancias de entrada y salida del circuito. Es posible aumentar o disminuir las impedancias. Como habrás adivinado, no recibimos estos beneficios por nada. El lado negativo de la retroalimentación negativa es que pierdes ganancia. Efectivamente, puede cambiar la ganancia por un aumento en el ancho de banda, una disminución en la distorsión y el control sobre las impedancias. Cuanta más ganancia cambies, mayores serán tus recompensas en las otras tres áreas. En el caso de nuestro amplificador operacional, esta es una sabia compensación porque ya tenemos más ganancia de la que necesitamos para aplicaciones típicas. Este daca y daca es una idea muy importante, así que recuerda “BIG D”. Eso significa Ancho de banda, Impedancia, Ganancia y Distorsión
En este punto, necesitamos definir algunos términos. Bucle cerrado se refiere a las características del sistema cuando existe retroalimentación. Por ejemplo, la ganancia de bucle cerrado es la ganancia del sistema con retroalimentación, mientras que la respuesta de frecuencia de bucle cerrado} se refiere a los nuevos puntos de ruptura del sistema. Las cantidades generalizadas de bucle cerrado se mostrarán con el subíndice "\(cl\)”. Del mismo modo, denotaremos impedancias, ganancia y similares para variantes de retroalimentación específicas con un subíndice de dos letras que abrevie la configuración de retroalimentación exacta. Una posibilidad de ganancia de bucle cerrado sería\(A_{sp}\). Bucle abierto se refiere a las características del propio amplificador. Para recordar esto, piense en desconectar o abrir el camino a través de la red de retroalimentación. Una vez que se rompe el camino, el amplificador está por sí solo. Ganancia de bucle abierto entonces, se refiere a la ganancia del amplificador por sí mismo, sin retroalimentación. Todas las cantidades de bucle abierto se mostrarán con el subíndice "\(ol\)”. El símbolo para ganancia de bucle abierto sería\(A_{ol}\). El término ganancia de bucle se refiere a la relación entre las ganancias de bucle abierto y cerrado (también se puede calcular a partir de su diferencia en decibelios en una gráfica de Bode). La ganancia de bucle indica cuánta ganancia hemos renunciado o sacrificado para mejorar el funcionamiento del sistema. En consecuencia, la ganancia de bucle a menudo se llama factor de sacrificio, y se le da el símbolo\(S\). Generalmente, las compensaciones son proporcionales al factor de sacrificio. Por ejemplo, si cortamos la ganancia a la mitad, generalmente duplicaremos el ancho de banda, y reduciremos a la mitad la distorsión. Un ejemplo que ilustra esto se puede ver en la Figura\(\PageIndex{2}\). Observe cómo la ganancia de bucle disminuye con el aumento de la frecuencia. Esto significa que los efectos de la retroalimentación a frecuencias más altas no son tan grandes.
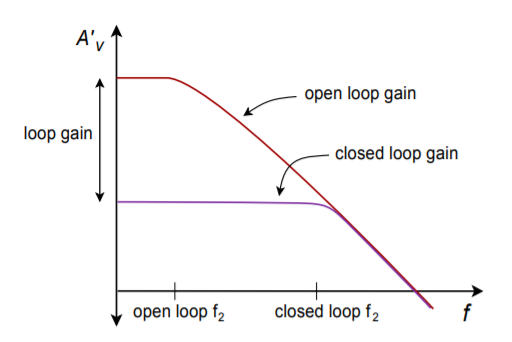
Figura\(\PageIndex{2}\): Respuesta con y sin retroalimentación.
Hasta este punto hemos hecho una simple suposición sobre nuestro sistema; que no exhibe ningún cambio de fase “extra” más allá de la inversión deseada. Como vimos en el primer capítulo, sin embargo, todos los circuitos producen cambios de fase a medida que aumenta la frecuencia de entrada. Si este cambio de fase extra llegara a -180\(^{\circ}\) mientras que la ganancia fuera mayor que la unidad (0dB), nuestro feedback negativo se convertirá en retroalimentación positiva (la inversión = -180\(^{\circ}\), más este extra -180\(^{\circ}\), nos coloca en -360\(^{\circ}\). El resultado neto es una señal en fase). Si esto sucediera, nuestro amplificador ya no sería estable. De hecho, muy bien puede convertirse en un oscilador de alta frecuencia. (Verás cómo hacerlo a propósito cuando cubras el Capítulo Nueve). A medida que se eleva la frecuencia de entrada, la fase eventualmente superará -180\(^{\circ}\) y la ganancia caerá a una fracción (< 0dB). La verdadera clave aquí es asegurarse de que la fase nunca alcance o supere -180\(^{\circ}\) cuando la ganancia cae a 1. Dicho de otra manera, cuando la fase golpea -180\(^{\circ}\), la ganancia debe ser una fracción. Generalmente, cuanto más lejos estés de esta “zona de peligro”, mejor. En otras palabras, es mejor si la fase extra en el punto de ganancia de unidad es -90\(^{\circ}\) en lugar de -170\(^{\circ}\). Ambos son estables, pero el primero te da algo de respiro.
Dos medidas de seguridad del circuito son los márgenes de ganancia y fase. El margen de fase indica la diferencia entre la fase real a ganancia unitaria y -180\(^{\circ}\). En el ejemplo anterior el primer circuito tendría un margen de fase de 90\(^{\circ}\) y el segundo tendría un margen de 10\(^{\circ}\). El margen de ganancia es la diferencia entre la ganancia real en dB en el punto de\(^{\circ}\) fase -180 y 0dB. Si nuestra ganancia fuera de -9 dB a -180\(^{\circ}\), el margen de ganancia sería de 9 dB (es decir, tenemos 9 dB “de sobra”). Los valores razonables para ganancia y margen de fase son > 6 dB y > 45\(^{\circ}\). Los márgenes de ganancia y fase se representan en la Figura\(\PageIndex{3}\). Es posible garantizar márgenes seguros si la respuesta de bucle abierto del amplificador mantiene un rolloff de 20 dB por década hasta la frecuencia de ganancia unitaria,\(f_{unity}\). Esto significa que solo hay una red de lag dominante que agregará un desplazamiento de fase máximo de -90\(^{\circ}\). Incluso si la segunda red coincidiera con\(f_{unity}\), agregaría -45\(^{\circ}\) como máximo. Esto todavía nos dejaría con un margen de 45\(^{\circ}\) fases. (Tenga en cuenta que si tuviéramos varias redes secundarias críticas en\(f_{unity}\) la fase podrían superar -180\(^{\circ}\), sin embargo la pendiente ya no sería de 20 dB por década en la realidad.) Es por esta razón que los amplificadores operacionales de propósito general examinados en el Capítulo Dos incluyeron un condensador compensador. No importa la cantidad de comentarios que deseemos utilizar, nuestros circuitos siempre terminarán siendo estables. Para obtener el mejor rendimiento del circuito, es posible utilizar amplificadores que no tengan la característica de “rolloff constante”. Existe la posibilidad de que puedan entrar en oscilación o volverse inestables si no se tiene cuidado e ignora los márgenes.
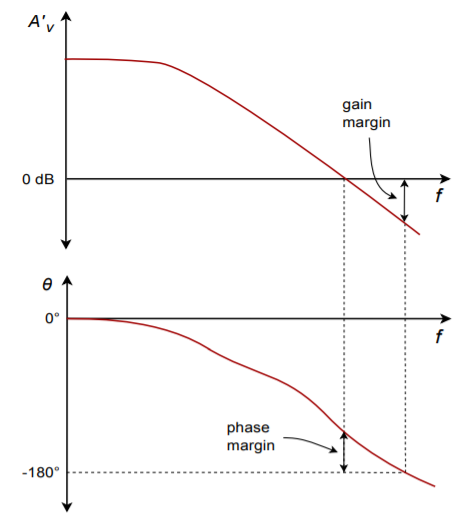
Figura\(\PageIndex{3}\): Ganancia y margen de fase determinados gráficamente a partir de la gráfica Bode.