
3.4: Las cuatro variantes de la retroalimentación negativa
- Page ID
- 87855

La retroalimentación negativa se puede lograr a través de cuatro formas diferentes. Difieren en cómo se cambian las impedancias de entrada y salida. Tenemos básicamente dos opciones a la hora de conectar la entrada y salida del amplificador a la salida y entrada de la red de retroalimentación. Podemos producir una conexión en serie o una conexión paralela. Esto arroja cuatro posibilidades totales. Cada conexión producirá un efecto específico en la impedancia de entrada o salida del sistema. Como puede adivinar, las conexiones paralelas disminuyen la impedancia y las conexiones en serie la aumentan. Una impedancia de entrada alta es deseable para la transferencia de voltaje máxima, mientras que se requiere una impedancia baja para la transferencia de corriente máxima. Como ayuda de memoria, piense en voltímetros y amperímetros. Para el efecto de carga más pequeño, los voltímetros deben exhibir una impedancia alta y los amperímetros uno muy bajo. En el caso de la conexión de salida, se requiere una baja impedancia de fuente para la mejor transferencia de voltaje, y una alta impedancia de fuente para la transferencia de corriente. Debe pensar en la fuente de voltaje ideal (cero\(Z_{out}\)) y la fuente de corriente ideal (infinita\(Z_{out}\)) aquí. En consecuencia, si conectáramos nuestra red de retroalimentación en serie con la entrada del amplificador, y en paralelo con su salida, tendríamos un aumento\(Z_{in}\) y una disminución en\(Z_{out}\). Esto significa que nuestro sistema sería muy bueno para detectar un voltaje de entrada e ideal para producir un voltaje. Habremos creado una fuente de voltaje controlado por voltaje (VCVS), el amplificador de voltaje ideal. Para que puedas hacerte una buena idea de las posibilidades, los cuatro tipos se resumen en la siguiente tabla.
| Tipo (in-out) | \(Z_{in}\) | \(Z_{out}\) | Modelo | Idealización | Ratio de transferencia |
| Serie-Paralelo | Alto | Bajo | VCVS | Amplificador de Voltaje | \(V_{out} /V_{in}\)Ganancia de voltaje |
| Serie-Serie | Alto | Alto | VCCS | Transductor de voltaje a corriente | \(I_{out} /V_{in}\)Transconductancia |
| Paralelo | Bajo | Bajo | CCVS | Transductor de corriente a voltaje | \(V_{out} /I_{in}\)Transresistencia |
| Serie Paralelo | Bajo | Alto | CCCS | Amplificador de corriente | \(I_{out} /I_{in}\)Ganancia de corriente |
En términos generales, las impedancias de entrada y salida se elevarán o disminuirán desde el valor de no retroalimentación por el factor de sacrificio. Tenga en cuenta que mediante el uso de la forma adecuada de retroalimentación, podemos lograr cualquiera de los modelos posibles. Esto mejora enormemente nuestra capacidad para tratar con aplicaciones específicas. Gran parte del trabajo en nuestro campo se basa en una óptima transferencia de voltaje, por lo que a menudo se usa Serie-Parallel (SP) También se utiliza frecuentemente una variación del Paralelo Paralelo (PP), como veremos.
3.4.1: Serie-Paralelo (SP)
La conexión SP lo convierte en el amplificador de voltaje ideal. En la Figura se muestra un diagrama de bloques generalizado\(\PageIndex{1}\). Se puede decir que tiene una entrada de serie porque no hay nodo de corriente de entrada. Contraste esto con la salida: Tenga en cuenta que la corriente de salida del amplificador operacional se divide en dos rutas, una a través de la carga y la otra en la red de retroalimentación. Este nodo de salida denota claramente la conexión de salida paralela de la retroalimentación.
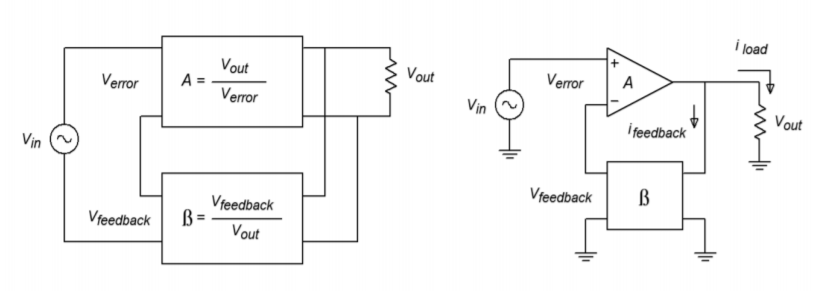
Figura\(\PageIndex{1}\): Conexión serie-paralelo.
Echemos un vistazo a exactamente cómo la retroalimentación negativa SP altera la ganancia del sistema, las impedancias y la respuesta de frecuencia. Para empezar, examinemos la ganancia de bucle cerrado (\(A_{sp}\)). Nuestro bloque amplificador produce una ganancia\(A\), y podría ser un amplificador diferencial, amplificador operacional u otra posibilidad de varias etapas. La red de retroalimentación es típicamente un divisor de voltaje y produce una pérdida,\(\beta\). La señal presentada a la entrada inversora del amplificador es la señal de retroalimentación y es igual a\(V_{out}\beta \). Tenga en cuenta que la señal de la fuente\(V_{in}\),, se aplica a la entrada no inversora. Por lo tanto, el voltaje de entrada diferencial (generalmente referido como\(V_{error}\)), es igual\(V_{in} – V_{feedback}\). También sabemos por trabajo previo con amplificadores diferenciales que eso\(V_{out} = V_{error} A_{ol}\) (\(A_{ol}\)es la ganancia de bucle abierto de los amplificadores). En otras palabras, sabemos:
\[ V_{in} = V_{error} + V_{feedback} \label{3.1} \]
\[ V_{feedback} = V_{out}\beta \label{3.2} \]
\[ V_{out} = V_{error}A_{ol} \label{3.3} \]
y por definición,
\[ A_{sp} = \frac{V_{out}}{V_{in}} \label{3.4} \]
Sustituyendo la ecuación\ ref {3.3} en la ecuación\ ref {3.2},
\[ V_{feedback} = V_{error}\beta A_{ol} \label{3.5} \]
Sustituyendo la ecuación\ ref {3.5} en la ecuación\ ref {3.1}, y simplificando,
\[ V_{in} = V_{error}(1+\beta A_{ol}) \label{3.6} \]
Finalmente, sustituyendo la Ecuación\ ref {3.6} y la Ecuación\ ref {3.3} por la Ecuación\ ref {3.4} y simplificando, rinde,
\[ A_{sp} = \frac{A_{ol} }{1+\beta A_{ol}} \label{3.7} \]
Dado que la definición fundamental de factor sacrificio,\(S\), es\(A_{ol}/A_{cl}\), podemos decir también\(A_{sp} = A_{ol}/S\) y por lo tanto, para SP,
\[ S = 1+\beta A_{ol} \label{3.8} \]
La ecuación\ ref {3.7} es nuestra ecuación de ganancia general pero, si podemos hacer\(\beta A_{ol} \gg 1\) podemos ignorar el “+1” en el denominador y simplificar aún más esto como,
\[ A_{sp} = \frac{1}{\beta } \label{3.9} \]
Esta ecuación aparentemente inocente tiene un golpe bastante fuerte. Lo que nos está diciendo es que la ganancia de bucle abierto del amplificador no} juega un papel en la configuración de la ganancia del sistema, siempre y cuando la ganancia de bucle abierto sea muy grande. En otras palabras, la ganancia del sistema es controlada únicamente por la red de retroalimentación. En consecuencia, nuestro amplificador puede exhibir grandes cambios de ganancia en su respuesta de bucle abierto, pero la respuesta de bucle cerrado permanecerá esencialmente constante. Por esta razón lograremos ganancias de bucle cerrado idénticas para amplificadores operacionales que exhiben diferencias considerables en sus ganancias de bucle abierto. Debido a que la distorsión de la señal es producida por no linealidades que se pueden ver como cambios de ganancia dinámica, nuestra distorsión de bucle cerrado también disminuye. Además, es este mismo efecto el que extiende nuestra respuesta de frecuencia de bucle cerrado. Imagine que nuestro amplificador exhibe una ganancia de 10,000 a su frecuencia de ruptura superior de 100 Hz. Si el factor de retroalimentación es igual a 0.1, nuestra ganancia exacta es:
\[ A_{sp} = \frac{10,000}{1+0.1\times 10,000} = 9.99 \nonumber \]
Si tuviéramos que medir la ganancia de bucle abierto del amplificador una década más, a 1 kHz, debería ser de alrededor de 1,000 (suponiendo una pérdida de 20 dB/década). La ganancia de bucle cerrado ahora es igual a:
\[ A_{sp} = \frac{1,000}{1+0.1\times 1,000} = 9.9 \nonumber \]
Como puede ver, la ganancia de bucle cerrado cambió solo alrededor de 1 a pesar de que la ganancia de bucle abierto cayó en un factor de 10. Si seguimos elevando la frecuencia, Asp equivaldría a 9.09 a 10 kHz. Finalmente, a 100 kHz se observa una caída considerable debido a que la ganancia cae a 5. En este punto, nuestro supuesto de\(\beta A_{ol} >> 1\) desmoronamientos. Sin embargo, tenga en cuenta que nuestra pérdida relativa a la ganancia de banda media es de solo unos pocos dB. Hemos extendido efectivamente el ancho de banda del sistema. En realidad, este cálculo está algo sobresimplificado ya que hemos ignorado el retraso de fase extra producido por el amplificador por encima de la frecuencia de ruptura de bucle abierto. Si asumimos que la respuesta de bucle abierto está dominada por una sola red lag (y debería ser, para garantizar la estabilidad, ¿recuerdas?) , una versión sensible a la fase de la Ecuación\ ref {3.7} sería:
\[ A_{sp} = \frac{− jA_{ol}}{ 1− jA_{ol} \beta } \nonumber \]
Esta fase extra alcanzará su máximo de -90 grados aproximadamente una década por encima de la frecuencia de ruptura de bucle abierto. En consecuencia, cuando encontramos la magnitud de ganancia a 100 kHz, no es
\[ A_{sp} = \frac{10}{1+1} \nonumber \]
sino más bien
\[ A_{sp} = \frac{10}{\sqrt{1^2+1^2}} \nonumber \]
que equivale a 7.07, para una pérdida relativa de -3 dB
Una forma más sencilla de afirmar todo esto es: La nueva frecuencia de ruptura superior es igual a la ruptura superior de bucle abierto multiplicada por el factor de sacrificio,\(S\). Porque\(S\) es la ganancia de bucle, es igual a\(A_{ol}/A_{sp}\). Tenga en cuenta que nuestra baja frecuencia\(S\) = 10,000/10, o 1,000. Por lo tanto, nuestra ruptura de bucle cerrado equivale a 1,000 veces 100 Hz, o 100 kHz. Un elemento muy importante a tener en cuenta aquí es que existe una relación inversa entre la ganancia de bucle cerrado y la respuesta de frecuencia. Los sistemas con ganancias bajas tendrán roturas superiores altas, mientras que los sistemas de ganancia alta sufrirán roturas superiores bajas. Este tipo de trade-off es muy común. Aunque la mayoría de los amplificadores diff y op amps no tienen frecuencias de interrupción más bajas, los circuitos que sí verán una extensión de su menor respuesta de manera similar. (es decir, la ruptura inferior se reducirá en\(S\)). Para lograr tanto una ganancia alta como un ancho de banda amplio, puede ser necesario poner en cascada múltiples etapas de baja ganancia.
Ejemplo\(\PageIndex{1}\)
Suponga que tiene un amplificador conectado como en la Figura\(\PageIndex{1}\). La ganancia de bucle abierto (\(A_{ol}\)) del amplificador es 200 y su frecuencia de ruptura superior de bucle abierto (\(f_{2-ol}\)) es de 10 kHz. Si el factor de retroalimentación (\(\beta \)) es 0.04, ¿cuáles son la ganancia de bucle cerrado (\(A_{sp}\)) y la frecuencia de ruptura (\(f_{2-sp}\))
Para\(A_{sp}\),
\[ A_{sp} = \frac{A_{ol}}{1+\beta A_{ol}} \nonumber \]
\[ A_{sp} = \frac{200}{1+0.04\times 200} \nonumber \]
\[ A_{sp} = 22.22 \nonumber \]
La aproximación dice:
\[ A_{sp} = \frac{1}{\beta } \nonumber \]
\[ A_{sp} = \frac{1}{0.04} \nonumber \]
\[ A_{sp} = 25 \nonumber \]
Eso es razonablemente cercano a la respuesta de la ecuación general (tenga en cuenta que no hay necesidad de incluir efectos de fase ya que estamos buscando la ganancia de banda media). La aproximación es más precisa cuando\(A_{ol}\) es mayor.
Porque\(f_{2-sp}\), primero encuentra el factor sacrificio,\(S\)
\[ S = \frac{A_{ol}}{A_{sp}} \nonumber \]
\[ S = \frac{200}{22.22} \nonumber \]
\[ S = 9 \nonumber \]
\[ f_{2-sp} = f_{2-ol}S \nonumber \]
\[ f_{2-sp} = 10 kHz\times 9 \nonumber \]
\[ f_{2-sp} = 90 kHz \nonumber \]
Una cosa interesante a tener en cuenta es que el producto de la ganancia y frecuencia de ruptura superior siempre será igual a un valor constante, asumiendo un roll off de 20 dB por década. Nuestro producto de bucle abierto es 200 veces 10 kHz, o 2 MHz. Nuestro producto de bucle cerrado es 22.22 veces 90 kHz, que es de 2 MHz. Si elegimos cualquier otro factor de retroalimentación, el resultante\(A_{sp}\) y también\(f_{2-sp}\) producirá un producto de 2 MHz (pruébalo y vea). El motivo de esto es simple. Un rolloff de 20 dB por década significa que la ganancia disminuye en un factor de 10 cuando la frecuencia se incrementa en un factor de 10. Existe una relación inversa 1:1 perfecta entre los dos parámetros. No importa cuánto se incremente un parámetro, el otro disminuirá en la misma proporción. Así, el producto es una constante.
En este punto tal vez te estés preguntando: “¿Qué hay exactamente en esa red de retroalimentación y cómo me doy cuenta\(\beta\)?” Por lo general, la red de retroalimentación solo necesita producir una pérdida, tiene que\(V_{out}\) reducirse a\(V_{feedback}\). El elemento más simple para el trabajo sería un divisor de voltaje resistivo. (Es posible tener elementos complejos dependientes de la frecuencia o no lineales en la red como veremos en el futuro). Un ejemplo se presenta en la Figura\(\PageIndex{2}\). Si estudias este diagrama por un momento, notarás que el factor de retroalimentación en realidad no\(\beta\) es más que la pérdida del divisor de voltaje. \(V_{out}\)es la entrada a la red de retroalimentación y aparece a través de\(R_f + R_i || Z_{in}\). La salida de la red es\(V_{feedback}\), que aparece a través de\(R_i\). En pocas palabras, la relación es
\[ \beta = \frac{R_i ||Z_{in}}{R_f +R_i ||Z_{in}} \nonumber \]
Si el\(Z_{in}\) es lo suficientemente grande como para ignorarlo, como en la mayoría de los amplificadores operacionales, esto simplifica a
\[ \beta = \frac{R_i}{R_f + R_i} \nonumber \]
Al sustituir esta Ecuación en nuestra Ecuación de ganancia aproximada\ ref {3.9}, encontramos
\[ A_{sp} = {R_f + R_i}{Ri} = \frac{R_f}{R_i} +1 \label{3.10} \]
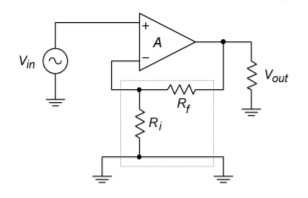
Figura\(\PageIndex{2}\): Divisor de voltaje simple para\(\beta\).
Tenga en cuenta que los valores de\(R_f\) y no\(R_i\) son realmente importantes, más bien, su proporción lo es. Llegaríamos a la misma ganancia si\(R_f = 10 k\Omega \) y\(R_i = 1 k\Omega \), o\(R_f = 20 k\Omega \) y\(R_i = 2 k\Omega \). Obviamente tenemos bastante latitud a la hora de diseñar circuitos para una ganancia específica, pero sí enfrentamos algunos límites prácticos. Si las resistencias son demasiado pequeñas, tendremos problemas con la corriente de salida de amplificador operacional. Por otro lado, si las resistencias son demasiado grandes, se producirán efectos excesivos de ruido, offset, deriva y carga. Como guía para circuitos de propósito general,\(R_f + R_i\) suele estar en el rango de 10 k a 100 k\(\Omega \).
Simulación por Computadora
Como se evidenció anteriormente, si la ganancia de bucle abierto es muy alta, su valor preciso no importa. Examinaremos este efecto usando Ejemplo\(\PageIndex{1}\), pero con ganancias de bucle abierto mucho más altas. La simulación se muestra en la Figura\(\PageIndex{3}\) usando Multisim y el modelo de amplificador operacional básico presentado en el Capítulo Dos. El circuito utiliza\(R_f = 24 k\Omega \) y\(R_i = 1 k \Omega \) para una ganancia de voltaje de bucle cerrado ideal de 25. La señal de entrada se establece en 40 milivoltios.
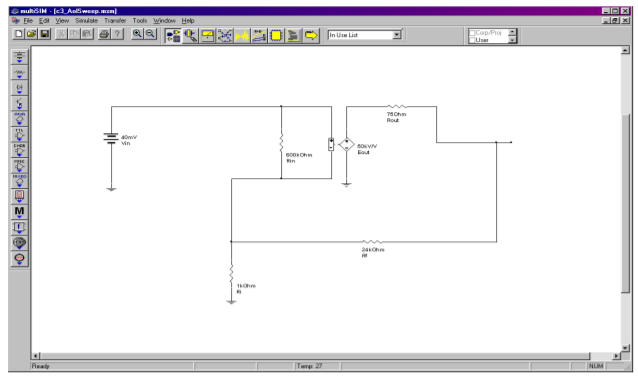
Figura\(\PageIndex{3a}\): Esquema Multisim para barrido de ganancia.
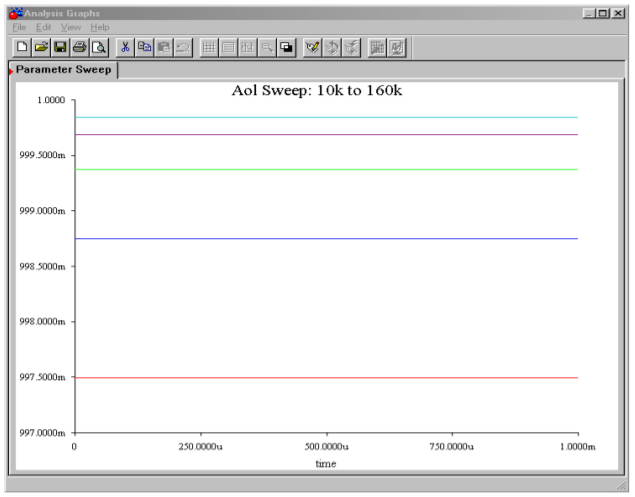
Figura\(\PageIndex{3b}\): Variación de salida debido al cambio de ganancia de bucle abierto.
Usando la opción Barrido de parámetros, la ganancia de bucle abierto se inicializa a 10,000 y se duplica progresivamente hasta un máximo de 160,000. Estos son valores de ganancia razonables para un amplificador operacional de producción. El análisis transitorio de salida muestra que a pesar de una variación de 16 a 1 en la ganancia de bucle abierto, todos los voltajes de salida son aproximadamente de 1 V, logrando una ganancia de bucle cerrado de casi 25 en todos los casos.
Ejemplo\(\PageIndex{2}\)
Digamos que el micrófono que usas para instrumentos acústicos produce una señal que es demasiado débil para que grabes sin ruido excesivo. Después de un poco de experimentación en laboratorio, descubres que necesitas unos 20 dB de ganancia de voltaje antes de poder capturar con éxito una guitarra suavemente escogida. Usando Figura\(\PageIndex{4}\) como guía, diseñe este amplificador con el siguiente dispositivo:\(A_{ol}\) = 50,000,\(Z_{in-ol} = 600 k\Omega \).
Primero, tenga en cuenta que nuestros\(Z_{in-ol}\) valores\(A_{ol}\) y son más que suficientes para que usemos las fórmulas de aproximación. Debido a que todas nuestras fórmulas tratan con ganancia ordinaria, debemos convertir 20 dB.
\[ A_{sp} = log^{−1} \frac{A_{sp}^{'}}{20} \nonumber \]
\[ A_{sp} = log^{−1} \frac{20 dB}{20} \nonumber \]
\[ A_{sp} = 10 \nonumber \]
Al reorganizar la ecuación\ ref {3.10},
\[ \frac{R_f}{R_i} = A_{sp}−1 \nonumber \]
\[ \frac{R_f}{R_i} = 9 \nonumber \]
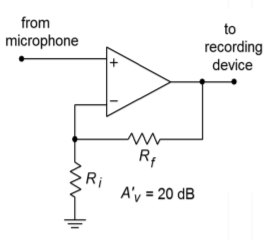
Figura\(\PageIndex{4}\): Amplificador de micrófono.
Vemos que\(R_f\) debe ser 9 veces más grande que\(R_i\). Aquí no hay una sola respuesta correcta; hay muchas posibilidades.
Simulación por Computadora
Una solución viable para Ejemplo\(\PageIndex{2}\) se simula usando Multisim en la Figura\(\PageIndex{5}\). Este circuito utiliza\(R_f = 9 k\Omega \) y\(R_i = 1 k\Omega \). El modelo op amp es la versión fuente dependiente simple examinada en el Capítulo Dos. La señal de entrada se establece en 0.1 V CC para mayor simplicidad. Se presentan tanto los potenciales de salida como de retroalimentación. Los resultados de esta simulación verifican nuestros cálculos manuales. Para anotar la sensibilidad del diseño, se pueden alterar ciertos parámetros del archivo de entrada y volver a ejecutar la simulación. Dos de las áreas más interesantes son los valores absolutos de las resistencias de retroalimentación y la ganancia de bucle abierto del amplificador operacional. Observará que a medida que se bajan estas cantidades, nuestras fórmulas de aproximación se vuelven menos precisas. Con los valores dados, las aproximaciones se desvían de los resultados de la simulación en menos de 1.
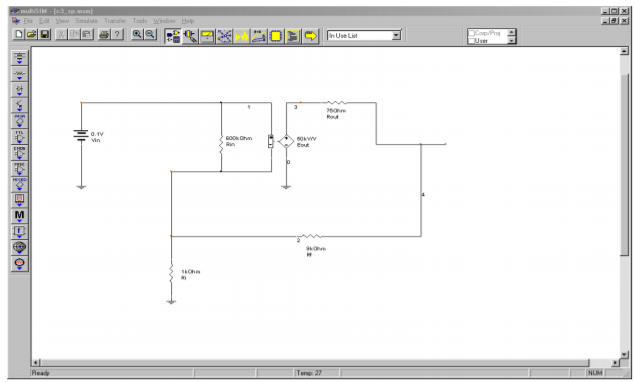
Figura\(\PageIndex{5a}\): Esquema Multisim para el análisis del modelo op amp simple del Ejemplo\(\PageIndex{2}\).
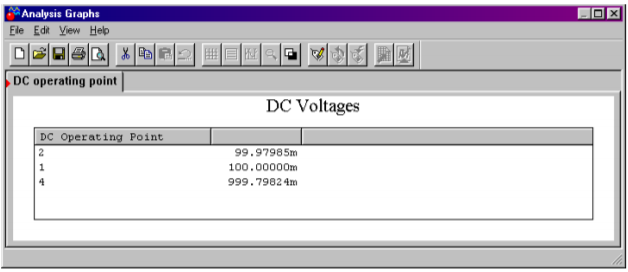
Figura\(\PageIndex{5b}\): Salidas Multisim DC.
3.4.2: Efectos de Impedancia SP
Como se señaló anteriormente, la retroalimentación negativa afecta las impedancias de entrada y salida de bucle cerrado de nuestro sistema. Las conexiones en serie aumentan la impedancia y las conexiones paralelas disminuyen la impedancia.
Veamos exactamente cómo funciona esto en el caso SP. Primero, debemos distinguir entre el\(Z_{in}\) del amplificador en sí y el\(Z_{in}\) del sistema con retroalimentación. Los llamaremos\(Z_{in-ol}\) y\(Z_{in-sp}\) respectivamente. La figura\(\PageIndex{6}\) muestra esta diferencia mediante el uso de un modelo simple del amplificador. Por definición,
\[ Z_{in-sp} = \frac{V_{in}}{I_{in}} \nonumber \]
La idea aquí es notar que la fuente solo necesita suministrar suficiente corriente de señal para desarrollar la\(V_{error}\) caída a través de los amplificadores\(Z_{in-ol}\). En lo que respecta a la fuente de\(V_{in}\) señal,\(V_{feedback}\) es una fuente de voltaje, no una caída de voltaje. Por lo tanto,\(I_{in} = V_{error}/Z_{in-ol}\).
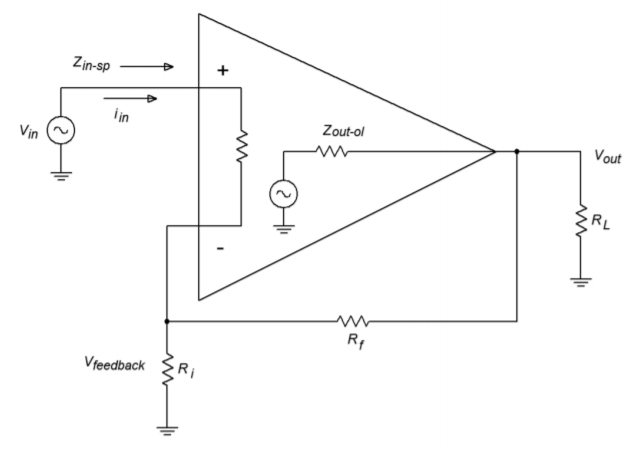
Figura\(\PageIndex{6}\): Impedancia de entrada serie-paralelo.
Ahora podemos decir,
\[ Z_{in -sp} = \frac{V_{in}}{\left(\frac{V_{error}}{Z_{in-ol}}\right)} = \frac{Z_{in-ol}V_{in}}{V_{error}} \nonumber \]
Porque\(V_{error}\) idealmente es igual\(V_{out}/A_{ol}\)
\[ Z_{in-sp} = \frac{Z_{in- ol}A_{ol}V_{in}}{V_{out}} = \frac{Z_{in-ol}A_{ol}}{A_{sp}} \nonumber \]
Factor de sacrificio\(S\), se define como\(A_{ol}/A_{sp}\), entonces,
\[ Z_{in-sp} = Z_{in-ol}S \nonumber \]
Esta es nuestra impedancia de entrada SP ideal. Obviamente, incluso el bucle abierto moderado\(Z_{in}s\) con factores de sacrificio moderados puede producir un ciclo cerrado alto\(Z_{in}s\). El límite superior a esto será la impedancia vista desde cada entrada a tierra. En el caso de un amplificador operacional típico, esto a veces se conoce como la impedancia de entrada de modo común\(Z_{in-cm}\), y puede ser muy alta (quizás cientos de mega ohmios). Esta es la impedancia que se presenta a las señales de modo común. Este valor efectivamente aparece en paralelo con nuestro calculado\(Z_{in-sp}\), arriba. Un ejemplo se muestra en la Figura\(\PageIndex{7}\). Tenga en cuenta que debido a que\(Z_{in-cm}\) se mide con las entradas del amplificador operacional en paralelo, cada entrada tiene aproximadamente el doble del valor a tierra. En el caso de un amplificador discreto, usted estaría más preocupado por las entradas no inversoras\(Z_{in}\). En todo caso, porque\(S\) cae a medida que aumenta la frecuencia,\(Z_{in-sp}\) disminuye también. A frecuencias muy altas, dominan las capacitancias de entrada y parásitas, y la impedancia de entrada real del sistema puede ser una pequeña fracción del valor de baja frecuencia. La retroalimentación negativa no puede reducir los efectos que viven fuera del bucle.
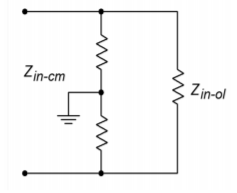
Figura\(\PageIndex{7}\): Impedancia de entrada de modo común.
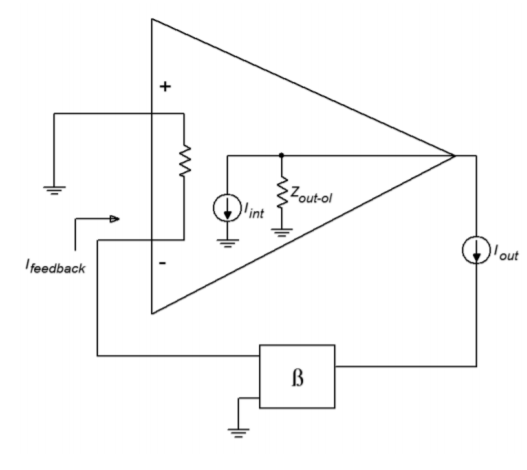
Ahora para nuestro\(Z_{out-sp}\). Consulte la Figura\(\PageIndex{8}\). \(Z_{out-sp}\)es la impedancia de salida Thevenin. Para encontrar esto, accionaremos la salida del amplificador con una fuente de voltaje y reduciremos todas las demás fuentes de voltaje independientes a cero (no tenemos fuentes de corriente. Recuerde, esta es una técnica de análisis “en papel” y puede que no funcione en laboratorio debido a otros factores). Al averiguar la corriente de salida resultante, podemos encontrar\(Z_{out-sp}\) (por definición,\(Z_{out-sp} = V_{out}/I_{out}\)).
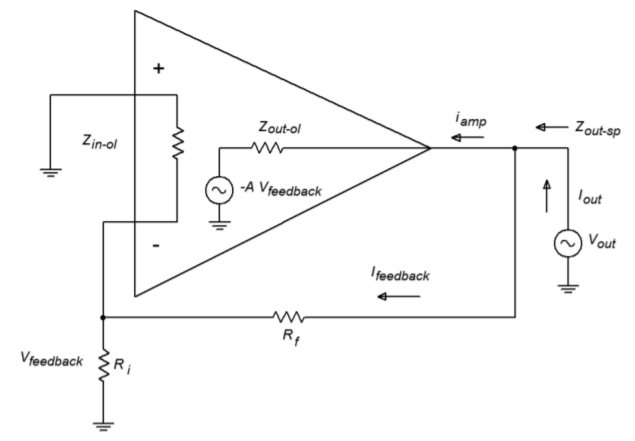
Figura\(\PageIndex{8}\): Impedancia de salida serie-paralelo.
Primero, fíjese que\(I_{out}\) está hecho de dos piezas,\(I_{feedback}\) y\(I_{amp}\). Si podemos encontrar las dos impedancias asociadas a estas partes, simplemente podemos realizar un equivalente paralelo para determinar\(Z_{out-sp}\). La\(I_{feedback}\) porción es muy fácil de determinar. Ignorando los efectos de carga de la entrada inversora en\(R_i\), esta impedancia es justa\(R_f + R_i\). Encontrar la impedancia de salida del amplificador en sí es un poco más complicado. \(I_{amp}\)se encuentra tomando la gota a través\(Z_{out-ol}\) y usando la Ley de Ohm. El voltaje a través\(Z_{out-ol}\) es la diferencia entre\(V_{out}\) y la señal creada por la ruta de retroalimentación a la entrada inversora. Esta señal es\(-A_{ol} V_{feedback}\).
\[ I_{amp} = \frac{V_{out}−(−A_{ol}V_{feedback})}{Z_{out - ol}} \nonumber \]
Desde\(V_{feedback} = V_{out}\beta \)
\[ I_{amp} = \frac{V_{out}+A_{ol}\beta V_{out}}{Z_{out - ol}} \nonumber \]
\[ I_{amp} = \frac{V_{out}+(1+A_{ol}\beta )}{Z_{out - ol}} \nonumber \]
Al usar la ecuación\ ref {3.8}, esto puede simplificarse a,
\[ I_{amp} = \frac{S V_{out}}{Z_{out-ol}} \nonumber \]
Porque
\[ Z_{out−amp} = \frac{V_{out}}{I_{amp}} \nonumber \]
Esta es la parte de\(Z_{out-sp}\) aportada por\(I_{amp}\). Para encontrar\(Z_{out-sp}\), basta con combinar las dos piezas en paralelo:
\[ Z_{out-sp} = \frac{Z_{out-ol}}{S} || (R_f +R_i) \nonumber \]
Con amplificadores operacionales,\(R_f + R_i\) es mucho más grande que la primera parte y puede ser ignorada. Por ejemplo, un dispositivo típico puede tener\(Z_{out-ol} = 75 \Omega \). Incluso un factor de sacrificio muy modesto producirá un valor muchas veces menor que un\(R_f + R_i\) combo típico (generalmente terminado\(1 k\Omega \)). Los circuitos discretos que utilizan conexiones comunes de emisor o base común tendrán\(Z_{out-ol}\) valores mayores y, por lo tanto, la trayectoria de retroalimentación puede producir un efecto considerable. Al igual que en el caso de la impedancia de entrada,\(Z_{out-sp}\) es una función de la frecuencia. A medida que\(S\) disminuye a medida que sube la frecuencia,\(Z_{out-sp}\) se incrementará.
Ejemplo\(\PageIndex{3}\)
Un amplificador operacional tiene las siguientes especificaciones de bucle abierto:\(Z_{in} = 300 k\Omega \)\(Z_{out} = 100 \Omega \) y A = 50,000. ¿Cuáles son las impedancias de entrada y salida del sistema de baja frecuencia si la ganancia de bucle cerrado se establece en 100?
Primero debemos encontrar\(S\)
\[ S = \frac{A_{ol}}{A_{sp}} \nonumber \]
\[ S = \frac{50,000}{100} \nonumber \]
\[ S = 500 \nonumber \]
Ahora podemos encontrar las soluciones aproximadas.
\[ Z_{in-sp} = S Z_{in-ol} \nonumber \]
\[ Z_{in-sp} = = 500\times 300\ k\Omega = 150\ M\Omega \nonumber \]
\[ Z_{out-sp} = \frac{Z_{out-ol}}{S} \nonumber \]
\[ Z_{out-sp} = \frac{100}{500} = 0.2\Omega \nonumber \]
Los efectos son bastante dramáticos. Tenga en cuenta que con\(Z_{in}\) valores tan altos, se pueden usar circuitos de amplificador operacional en lugar de FET en algunas aplicaciones. Un ejemplo sería el amplificador/buffer frontal en un electrómetro (voltímetro electrostático).
3.4.3: Efectos de distorsión
Como se señaló anteriormente, la retroalimentación negativa disminuye las formas estáticas de distorsión, como el THD. La pregunta, como siempre, es “¿cuánto?” Algo así como la distorsión armónica se genera internamente, por lo que podemos modelarla como una fuente de voltaje en serie con la fuente de salida. Un ejemplo de este modelo se puede ver en la Figura\(\PageIndex{9}\). \(V_{dist}\)es el generador de distorsión. En el caso de una onda sinusoidal de entrada simple,\(V_{dist}\) contendrá armónicos a diversas amplitudes (ondas sinusoidales en múltiplos enteros de la frecuencia de entrada). Estas amplitudes están directamente relacionadas con la amplitud de la señal de entrada. Si asumimos que\(Z_{out}\) es lo suficientemente pequeño como para ignorarlo,\(V_{dist}\) aparecerá en la salida del circuito de bucle abierto. Por lo tanto, el voltaje de salida total es el\(AV_{in}\) plus deseado\(V_{dist}\).
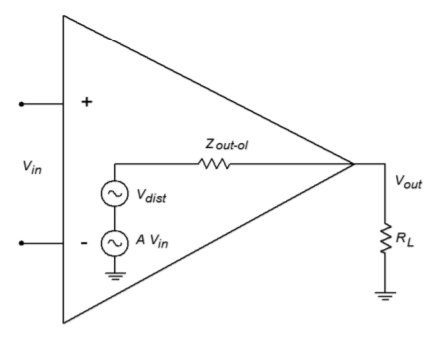
Figura\(\PageIndex{9}\): Modelo de distorsión (bucle abierto)
Cuando agregamos retroalimentación, como en la Figura\(\PageIndex{10}\), esta señal de distorsión se retroalimenta a la entrada inversora, y debido a que ahora está desfasada, cancela parcialmente la distorsión generada internamente. Por lo tanto, la señal de distorsión SP (\(V_{dis-sp}\)) es mucho más pequeña.
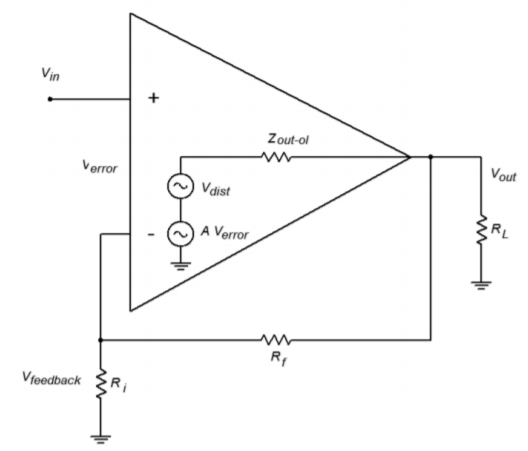
Figura\(\PageIndex{10}\): Modelo de distorsión (bucle cerrado)
La señal de salida SP es
\[ V_{out} = A_{ol} V_{error} +V_{dist} \nonumber \]
\[ V_{out} = A_{ol} (V_{in}−V_{feedback}) + V_{dist} \nonumber \]
\[ V_{out} = A_{ol} (V_{in}−\beta V_{out}) + V_{dist} \nonumber \]
Ahora realizamos algo de álgebra con el fin de obtener esto en una forma más agradable y resolver para\(V_{out}\)
\[ V_{out} = A_{ol} V_{in}−A_{ol}\beta V_{out} + V_{dist} \\ V_{out} + A_{ol}\beta V_{out} = A_{ol} V_{in} +V_{dist} \\ V_{out}(1+A_{ol}\beta ) = A_{ol}V_{in}+V_{dist} \nonumber \]
Recuerda que\(1 + A_{ol}\beta = S\), entonces,
\[ V_{out}S = A_{ol}V_{in} + V_{dist} \\ V_{out} = A_{ol}\frac{V_{in}}{S} + \frac{V_{dist}}{S} \nonumber \]
Porque\(A_{ol}/S\) es justo\(A_{sp}\), esto reduce a,
\[ V_{out} = A_{sp} V_{in} + \frac{V_{dist}}{S} \nonumber \]
La distorsión generada internamente se reduce por el factor de sacrificio. Como puede ver, los grandes factores de sacrificio pueden reducir drásticamente la distorsión. Un amplificador con 10% THD y un factor de sacrificio de 100 produce una distorsión efectiva de solo 0.1%. Este análisis supone que la distorsión de bucle abierto no es demasiado grotesca. Si la distorsión es grande, no podemos usar este enfoque de superposición (recuerde, la superposición asume que el circuito es esencialmente lineal). Además, estamos ignorando cualquier distorsión adicional creada al alimentar esta distorsión de nuevo al amplificador. Para cualquier amplificador razonablemente lineal, esta distorsión adicional es un efecto de segundo orden y, por lo tanto, constituye solo una pequeña parte de la señal de salida total.
Simulación por Computadora
Un ejemplo de la reducción de distorsión se simula usando el Analizador de Distorsión de Multisim. Un amplificador básico se muestra en la Figura\(\PageIndex{11}\). El valor para\(R_f\) se cambia de 999 k\(\Omega\) a 99 k\(\Omega\) a 9 k\(\Omega\). \(V_{in}\)se escala en consecuencia para que la salida del amplificador permanezca en aproximadamente 10 voltios. La frecuencia de prueba se fijó en 1 kHz y en el análisis se utilizaron un total de 20 armónicos (hasta 20 kHz). Usando el amplificador operacional LF411, la versión de alta ganancia muestra un THD de 0.09%. Al reducir la ganancia en un factor de 10 (y así aumentar el factor de sacrificio en 10 veces) se obtiene un THD de 0.011%. Finalmente, una reducción adicional de ganancia de 10 veces produce un THD de 0.001%. Si bien la reducción de la distorsión no es exactamente un factor de 10 cada vez, la tendencia se puede ver claramente. Los valores precisos de distorsión dependerán de la precisión del modelo op amp utilizado, la frecuencia de prueba y el número de armónicos guardados en el análisis. Aquí se eligió 20 kHz porque eso representa el límite superior de la audición humana, y por lo tanto sería apropiado para un amplificador de audio.
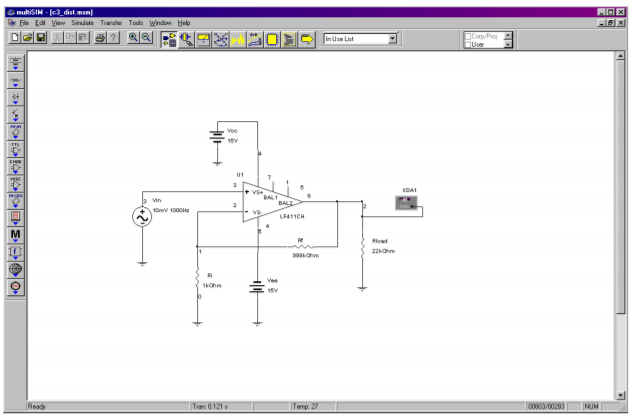
Figura\(\PageIndex{11a}\): Análisis de distorsión multisim
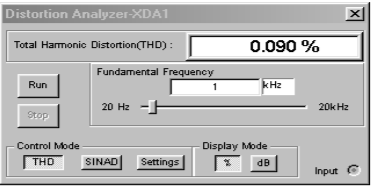
Figura\(\PageIndex{11b}\): Resultados del analizador de distorsión para la versión de alta ganancia.
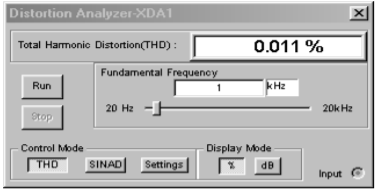
Figura\(\PageIndex{11c}\): Resultados del analizador de distorsión para la versión de ganancia media.
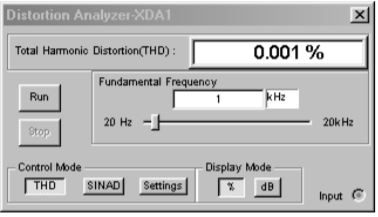
Figura\(\PageIndex{11d}\): Resultados del analizador de distorsión para la versión de baja ganancia.
Como hemos visto, el factor sacrificio es un ítem muy útil. Nuestra ganancia, distorsión, y todos\(Z_{out}\) se reducen en\(S\), mientras\(f_2\) y\(Z_{in}\) se incrementan en\(S\).
3.4.4: Ruido
Es posible modelar los efectos de ruido de la misma manera que acabamos de modelar los efectos de distorsión. Al hacerlo, descubrirás que el ruido también se puede disminuir en gran cantidad. Desafortunadamente, hay un defecto importante. A diferencia de nuestro generador de distorsión, un generador de ruido producirá una señal que no depende de la señal de entrada. El resultado neto es que aunque el nivel de ruido sí cae por el factor de sacrificio, también lo hace la señal de salida deseada. Por lo tanto, la relación señal/ruido en la salida no cambia. Por el contrario, la señal de distorsión es proporcional a la señal de entrada, de modo que cuando se corta la señal deseada\(S\), la señal de distorsión ve un corte adicional por\(S\) (es decir, la distorsión cae en\(S\) relación con la señal deseada). De hecho, es muy posible que el ruido producido en las siguientes etapas pueda sumar más ruido del que tenía el circuito sin retroalimentación. Triste pero cierto, la retroalimentación negativa no nos ayuda cuando se trata de la relación señal/ruido.
3.4.5: Serie Paralelo (PS)
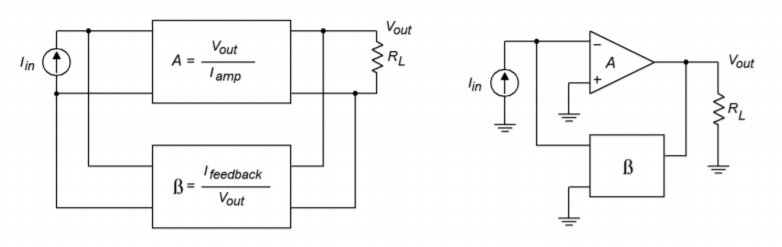
La conexión Parallel-Series es lo opuesto a la forma Serie-Paralelo. PS retroalimentación negativa se utiliza para hacer el amplificador de corriente ideal. Su ganancia es adimensional, pero por conveniencia, normalmente se le dan las unidades A/A (amperios por amp). Produce un bajo\(Z_{in}\) (perfecto para detectar\(I_{in}\)) y un alto\(Z_{out}\) (lo que lo convierte en una fuente de corriente ideal). Un ejemplo de PS se muestra en la Figura\(\PageIndex{12}\).
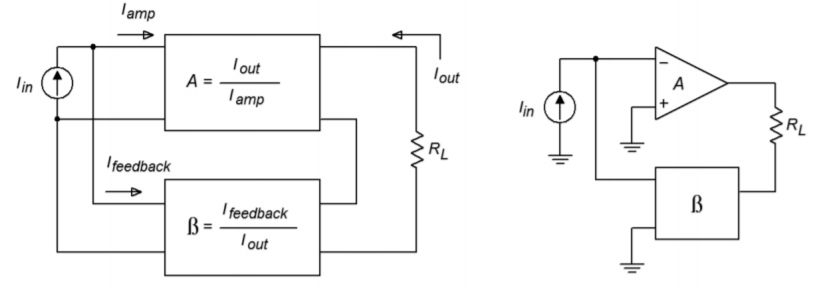
Figura\(\PageIndex{12}\): Conexión serie paralela.
La corriente de la fuente de señal se divide en dos, con parte entrando en el amplificador y parte pasando por la red de retroalimentación. Así es como sabes que tienes una conexión de entrada paralela. La corriente de salida por otro lado, pasa a través de la carga y luego ingresa a la red de retroalimentación, indicando una conexión de salida en serie. Tenga en cuenta que este modelo general es de tipo inversor, y que la carga es flotante (es decir, no referenciada al suelo). Sin embargo, es posible usar cargas referenciadas a tierra con algunos circuitos adicionales. Como PS se utiliza para la amplificación de corriente, veamos cómo podemos encontrar la ganancia de corriente. La figura nos\(\PageIndex{13}\) ayudará a lo largo. La ganancia de corriente PS se define como:
\[ A_{ps} = \frac{I_{out}}{I_{in}} \label{3.11} \]
La corriente de la fuente de señal se divide en dos caminos, por lo que
\[ I_{in} = I_{amp} + I_{feedback} \label{3.12} \]
Porque las\(I_{amp}\) veces que la ganancia de corriente de bucle abierto del amplificador es\(I_{out}\), también podemos decir,
\[ I_{amp} = \frac{I_{out}}{A_{ol}} \label{3.13} \]
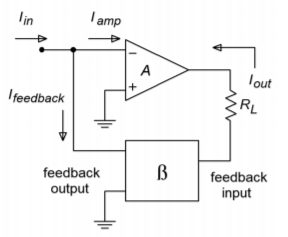
Figura\(\PageIndex{13}\): Análisis paralelo-serie.
La red de retroalimentación no es más que un divisor de corriente, donde la salida de la red de retroalimentación (\(I_{feedback}\)) es\(\beta \) veces más pequeña que su input (\(I_{out}\)). No dejes que la dirección arbitraria de la corriente te engañe: el “flujo” de retroalimentación sigue siendo de derecha a izquierda, como siempre. En este caso el amplificador está hundiendo corriente en lugar de abastecerla. Como\(\beta \) es solo una fracción, podemos decir
\[ \beta = \frac{I_{feedback}}{I_{out}} \text{or}, \\ I_{feedback} = \beta I_{out} \\ I_{feedback} = A_{ol}\beta I_{amp} \label{3.14} \]
Al sustituir la Ecuación\ ref {3.14} en la Ecuación\ ref {3.12} vemos que
\[ I_{in} = I_{amp} + A_{ol} \beta I_{amp}\ \text{or}, \\ I_{in} = I_{amp}(1+ A_{ol}\beta ) \label{3.15} \]
Después de sustituir esto en la Ecuación\ ref {3.11} encontramos que
\[ A_{ps} = \frac{I_{out}}{I_{amp}(1+ A_{ol}\beta )} \nonumber \]
o, con la ayuda de la Ecuación\ ref {3.13}
\[ A_{ps} = \frac{I_{out}}{1+ A_{ol}\beta } \label{3.16} \]
Para abreviar una historia larga, la ganancia de bucle abierto se reduce por el factor de sacrificio. (¿Dónde hemos visto esto antes?) El único elemento que debe tener en cuenta es que solo hemos utilizado ganancias de corriente en nuestra derivación (en comparación con las ganancias de voltaje en el caso SP).
Es posible realizar una derivación utilizando la ganancia de voltaje de bucle abierto; sin embargo, los resultados son básicamente los mismos, como habrás adivinado. Una vez más, nuestra aproximación para la ganancia se puede expresar como\(1/\beta\).
Ejemplo\(\PageIndex{4}\)
Una compañera de trabajo te pide medir la corriente de salida de un circuito que acaba de construir. Si todo está funcionando correctamente, este circuito debería producir 100 microamperios. Desafortunadamente, su DMM de mano solo medirá con precisión hasta 1 miliamperio. Es 10 veces menos sensible de lo que necesita ser. Para poder leerse con precisión, será necesario impulsar la corriente. ¿El amplificador de Figure\(\PageIndex{14}\) tiene la ganancia de corriente que necesitas?
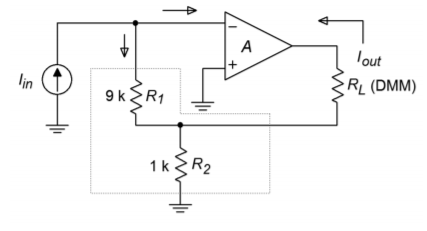
Figura\(\PageIndex{14}\): Amplificador de corriente para Ejemplo\(\PageIndex{4}\).
Si estamos usando un amplificador operacional, podemos asumir que\(A_{ps} = 1/\beta \). La pregunta entonces se convierte en “¿qué es\(\beta\)?” \(\beta\)es la relación del divisor de corriente. Las resistencias\(R_1\) y\(R_2\) conforman el divisor de corriente. La corriente de salida se divide entre\(R_1\) y\(R_2\), donde está la\(R_1\) ruta\(I_{feedback}\). De acuerdo con la regla divisora vigente,
\[ \beta = \frac{R_2}{R_1+R_2} \nonumber \]
En consecuencia, la magnitud de ganancia es
\[ A_{ps} = \frac{R_1+ R_2}{R_2} \text{or}, \nonumber \]
\[ A_{ps} = \frac{R_1}{R_2} +1 \nonumber \]
¡Esta Ecuación se parece mucho a la del ejemplo de SP! Resolviendo\(A_{ps}\) rendimientos
\[ A_{ps} = \frac{9\ k}{1\ k} +1 \nonumber \]
\[ A_{ps} = 10 \nonumber \]
Sí, este circuito tiene justamente la ganancia que necesitas. Todo lo que tiene que hacer es conectar el circuito de su compañero de trabajo a la entrada y reemplazar la resistencia de carga con su DMM portátil. Tenga en cuenta que la mayoría de los DMM son instrumentos flotantes y no están atados a tierra (a diferencia de un osciloscopio), por lo que usarlo como carga flotante no presenta problemas. La precisión de la ganancia (y por lo tanto su medición) depende de la precisión de las resistencias y del tamaño relativo de la corriente de polarización de entrada del amplificador operacional. Por lo tanto, sería recomendable utilizar un dispositivo tipo BI-FET (es decir, un amplificador operacional con un amplificador diferencial FET) y resistencias de precisión.
3.4.6: Efectos de impedancia PS
Como se ha visto, la derivación de ganancia para PS es similar a la de SP. Lo mismo es cierto para las ecuaciones de impedancia. Primero, echaremos un vistazo a la impedancia de entrada con la Figura\(\PageIndex{15}\).
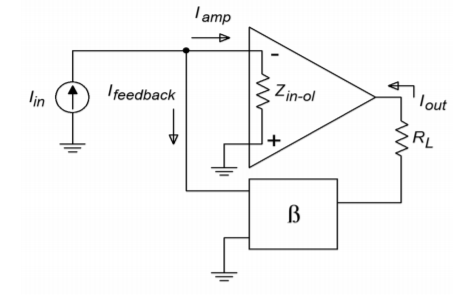
Figura\(\PageIndex{15}\): Impedancia de entrada serie paralela.
Como siempre, comenzamos con nuestra definición base,
\[ Z_{in-ps} = \frac{V_{in}}{I_{in}} \nonumber \]
Recordando la ecuación\ ref {3.15}, esto puede ser reescrito como,
\[ Z_{in-ps} = \frac{V_{in}}{I_{amp}(1+ A_{ol} \beta )} \label{3.17} \]
\(V_{in}\)es simplemente el voltaje que aparece desde la entrada inversora a tierra. Al usar la Ley de Ohm, podemos decir,
\[ V_{in} = I_{amp}Z_{in-ol} \nonumber \]
Dónde\(Z_{in-ol}\) está la impedancia de entrada de bucle abierto. Finalmente, sustituyendo esto en la Ecuación\ ref {3.17} da,
\[ Z_{in-sp} = \frac{I_{amp}Z_{in-ol}}{I_{amp}(1+ A_{ol} \beta )} \nonumber \]
\[ Z_{in-sp} = \frac{Z_{in-ol}}{(1+ A_{ol} \beta )} \nonumber \]
La impedancia de entrada se reduce por el factor de sacrificio. Si empiezas a preguntarte si todo está alterado por el factor sacrificio, la respuesta es, sí. Esto es, por supuesto, una aproximación. ¿Qué crees que va a pasar con la impedancia de salida? En este punto, no debería ser demasiado sorprendente. Para esta prueba, refiérase a la Figura\(\PageIndex{16}\). Utilizaremos la misma técnica general para encontrar\(Z_{out}\) que hicimos con la configuración del SP. En este caso reemplazamos la carga con una fuente de corriente, y luego determinamos el voltaje de salida resultante.
Figura\(\PageIndex{16}\): Impedancia de salida en serie paralela.
Tenga en cuenta que la fuente de corriente de señal de entrada está abierta. La corriente de salida impulsa la red de retroalimentación y produce la corriente de retroalimentación. La corriente de realimentación se multiplica entonces por la ganancia de corriente de bucle abierto del amplificador. Debido a que la corriente de retroalimentación ingresa a la entrada inversora, la fuente interna es corriente de hundimiento. Debido a que estamos impulsando el circuito desde la salida,
\[ Z_{out−ps} = \frac{V_{out}}{I_{out}} \nonumber \]
\(V_{out}\)se encuentra a través de la Ley de Ohm
\[ V_{out} = Z_{out-ol}(I_{out} + I_{int}) \nonumber \]
Ahora ampliamos nuestras corrientes.
\[ I_{int} = I_{feedback} A_{ol} \nonumber \]
\[ I_{int} = I_{out} \beta A_{ol} \nonumber \]
\[ V_{out} = Z_{out−ol} (I_{out} + I_{out} \beta A_{ol}) \nonumber \]
\[ V_{out} = Z_{out−ol} I_{out} (1+ A_{ol} \beta ) \nonumber \]
\[ V_{out} = Z_{out−ol} I_{out} S \nonumber \]
Por último, vemos que,
\[ Z_{out−ps} = \frac{Z_{out−ol} I_{out} S}{I_{out}} \nonumber \]
\[ Z_{out−ps} = Z_{out−ol}S \nonumber \]
Como era de esperar, la conexión de salida en serie aumentó\(Z_{out}\) por el factor de sacrificio. El resto de las ecuaciones PS son esencialmente las utilizadas en nuestro trabajo anterior de SP. Una vez más, el ancho de banda se incrementará en\(S\), y la distorsión se reducirá en\(S\). Esto también es cierto para las conexiones Parallel-Parallel y Series-Series. De hecho, las\(Z_{out}\) relaciones\(Z_{in}\) y son justo lo que cabría esperar. Las pruebas son básicamente las mismas que las ya presentadas, así que no entraremos en ellas. Baste decir que las conexiones paralelas reducen la impedancia en\(S\), y las conexiones en serie la aumentan en\(S\).
3.4.7: Paralelo-Paralelo (PP) y Serie Serie (SS)
A diferencia de nuestros dos ejemplos anteriores, el concepto y modelado de ganancia no es tan sencillo en los casos Parallel-Parallel y Series-Series. Estas formas no producen ganancia, por así decirlo. No son ni amplificadores de voltaje, ni amplificadores de corriente. En cambio, estas conexiones se utilizan como transductores. Paralelo-Paralelo convierte una corriente de entrada en una tensión de salida. Se muestra en la Figura\(\PageIndex{17}\).
Figura\(\PageIndex{17}\): Conexión paralelo-paralelo.
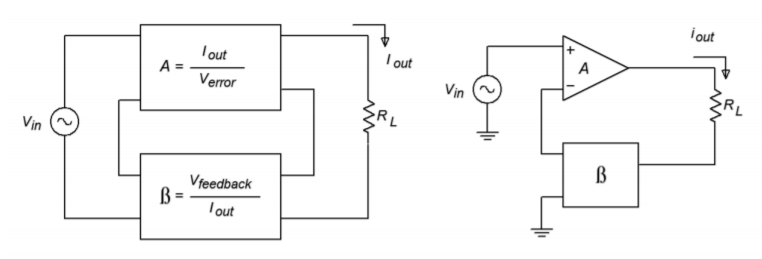
Series-Series convierte un voltaje de entrada en una corriente de salida. Se muestra en la Figura\(\PageIndex{18}\). Nuestros factores normales de ganancia y retroalimentación ahora tienen unidades asociadas con ellos. Debido a que nuestras cantidades de salida versus entrada se miden en voltios por amperio (PP) o amperios por voltio (SS), las unidades adecuadas para nuestros factores son Ohmios y Siemens. Para ser específicos, nos referimos a nuestra ganancia PP como un valor de transresistencia, y la ganancia SS como un valor de transconductancia. Aunque es bastante posible (y útil) derivar fórmulas de ganancia basadas en estas, a menudo se hace solo para diseños discretos. Simplemente, no puede encontrar valores de transresitancia o transconductancia en las hojas de datos típicas de amplificador operacional.
Afortunadamente, podemos hacer algunas aproximaciones y crear algunos circuitos muy útiles utilizando retroalimentación PP y SS con amplificadores operacionales. Estos atajos de diseño y análisis se presentan en el siguiente capítulo, junto con aplicaciones prácticas.
Figura\(\PageIndex{18}\): Conexión serie-serie.