
5.5: Desplazamientos
- Page ID
- 87926

Las compensaciones son niveles de CC indeseables que aparecen en la salida de un circuito. Si los amplificadores operacionales fueran perfectos, no habría tal cosa como una compensación. Aunque la coincidencia de piezas es muy cercana cuando se hacen los CI, las partes no serán idénticas. Un posible ejemplo es el hecho de que los transistores utilizados para la etapa de amplificador diferencial no tendrán características idénticas. Debido a esto, sus puntos de polarización de CC son ligeramente diferentes. Esta diferencia, o desequilibrio, es amplificada por las etapas restantes y eventualmente producirá un voltaje de CC en la salida. Debido a que todos los amplificadores operacionales son ligeramente diferentes, nunca se sabe cuál será el desplazamiento exacto de salida. Para aplicaciones de medición, este desplazamiento crea incertidumbre en las lecturas. Por ejemplo, si la salida del circuito mide 100 mV, la señal podría ser 99 mV con 1 mV de desplazamiento. También podría ser 101 mV con un desplazamiento de -1mV. En otras aplicaciones, las compensaciones pueden dañar las siguientes etapas o cargas. Los altavoces dinámicos y los auriculares son dos cargas que no deben alimentarse con señales de CC. Esto reducirá su volumen máximo y aumentará su distorsión. En definitiva, no se desean compensaciones. Veamos cuáles son las causas y cómo podemos reducir o eliminar su efecto.
5.5.1: Fuentes de compensación y compensación
Para las secciones de entrada bipolares, la causa principal de desajuste de corriente de entrada es la variación de beta. La variación del voltaje de la unión base-emisor es la causa principal de la desviación del voltaje de entrada. Para los dispositivos de efecto de campo, la variación de corriente es un problema mucho menor ya que la magnitud de la corriente de entrada es muy baja para empezar. Desafortunadamente, los FET sufren mayores variaciones de voltaje de entrada debido a los desajustes de las curvas de transconductancia.
Como se menciona en el Capítulo Dos, se llama la corriente de entrada a las bases (o puertas, en el caso de un FET) de la primera etapa\(I_B\), la corriente de polarización de entrada. En realidad, esto es un promedio de las dos corrientes de entrada,\(I_{B+}\) y\(I_{B-}\). La magnitud de su diferencia se llama corriente de compensación de entrada,\(I_{OS}\) (algunos fabricantes utilizan el símbolo\(I_{IO}\)). Tenga en cuenta que la dirección real de normalmente no\(I_B\) se especifica, pero generalmente se puede determinar a partir del diagrama de circuito del fabricante. \(I_B\)fluye hacia el amplificador operacional si los dispositivos de entrada son NPN, y fuera del amplificador operacional si los dispositivos de entrada son PNP.
\[ I_B = \frac{I_{B+} + I_{B-}}{2} \nonumber \]
\[ I_{OS} = | I_{B+} − I_{B-} | \label{5.12} \]
La diferencia de voltaje para la etapa de entrada se conoce como el voltaje de compensación de entrada,\(V_{OS}\) (algunos fabricantes usan el símbolo\(V_{IO}\)). Este es el potencial requerido entre las dos entradas para anular la salida, es decir, para realinear la salida a 0 V DC. Ambos\(I_{OS}\) y\(V_{OS}\) están disponibles en hojas de datos. La magnitud absoluta de estas compensaciones generalmente empeora a temperaturas extremas. \(\PageIndex{1}\)La tabla muestra algunos valores típicos. Anote el bajo\(I_{B}\) y\(I_{OS}\) los valores para la entrada FET 411.
| Dispositivo | \(I_B\) | \(I_{OS}\) | \(V_{OS}\) |
| 5534 | 800 nA | 10 nA | 0.5 mV |
| 411 | 50 pA | 25 pA | 0.8 mV |
| 318 | 150 nA | 30 nA | 4 mV |
| 741 | 80 nA | 20 nA | 1 mV |
Mesa\(\PageIndex{1}\)
Recuerde, estos números son absolutos, por lo que cuando\(I_{OS}\) se especifica como 10 nA, significa que el real\(I_{OS}\) puede estar en cualquier lugar entre -10 nA y +10 nA. \(I_B\),\(I_{OS}\) y\(V_{OS}\) se combinan con otros elementos de circuito para producir un voltaje de compensación de salida. Al tratarse de un circuito lineal, la superposición puede ser utilizada para calcular por separado sus efectos. Se\(\PageIndex{1}\) utilizará el modelo de la Figura. \(R_i\)y\(R_f\) son los componentes de retroalimentación estándar, y\(R_{off}\) se llama resistencia de compensación de compensación (en algunos casos puede ser cero). Debido a que la señal de entrada está conectada a tierra, este modelo es válido tanto para amplificadores de inversión como de no inversión.
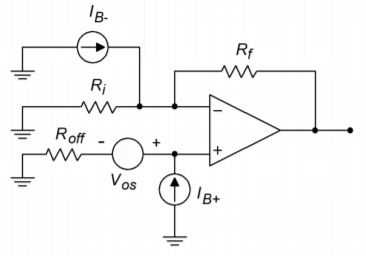
Figura\(\PageIndex{1}\): Modelo Offset.
\(V_{OS}\)se ve como un pequeño voltaje de entrada y se multiplica por la ganancia de ruido del circuito para encontrar su contribución al desplazamiento de salida. Las compensaciones son por naturaleza CC, por lo que es importante usar la ganancia de ruido de CC. En consecuencia, cualquier capacitor que se encuentre dentro del bucle de retroalimentación debe ser matemáticamente “abierto” para este cálculo (por ejemplo, cuando se trabaja con los circuitos de filtro presentados en el Capítulo Once)
\[ V_{out−offset 1} = A_{noise} V_{OS} \label{5.13} \]
donde
\[ A_{noise} = 1+ \frac{R_f}{R_i} = \frac{R_i+R_f}{R_i} \nonumber \]
\(I_B\)y\(I_{OS}\) pasar a través de resistencias de entrada y retroalimentación para producir sus contribuciones de salida. Primero, considere el efecto de\(I_{B+}\). Esto crea un voltaje a través\(R_{off}\). Este voltaje se multiplica entonces por la ganancia de ruido del circuito para producir su porción del desplazamiento de salida.
\[ V_{out -offset 2} = I_{B+} R_{off} A_{noise} \label{5.14} \]
Para\(I_{B-}\), recordemos que la entrada inversora está en terreno virtual. Esto implica que el voltaje transversal\(R_i\) debe ser cero, y por lo tanto, la corriente pasante\(R_i\) debe ser cero. En consecuencia, todo\(I_{B-}\) fluye a través\(R_f\). Esto crea un potencial negativo relativo en la salida.
\[ V_{out -offset 3} = −I_{B-} R_f \label{5.15} \]
Entonces la combinación de los efectos de corriente de polarización de entrada es:
\[ V_{out -offset(I_B)} = | I_{B+} R_{off} A_{noise} − I_{B-} R_f | \label{5.16} \]
Ampliar esto produce
\[ V_{out -offset(I_B)} = I_{B+} R_{off} \frac{R_i+R_f}{R_i} − I_{B-} R_f \nonumber \]
\[ V_{out -offset(I_B)} = \left( I_{B+} R_{off} \frac{R_i+R_f}{R_i R_f} −I_{B-}\right) R_f \nonumber \]
Al señalar la regla de suma de producto para la combinación de resistencias\(R_i\)\(R_f\), esto se puede simplificar aún más para
\[ V_{out -offset(I_B)} = \left(\frac{I_{B+} R_{off}}{R_i || R_f} −I_{B-}\right) R_f \label{5.17} \]
Si\(R_{off}\) se establece en igual\(R_i || R_f\), esto se reduce a:
\[ V_{out -offset(I_B)} = (I_{B+} − I_{B-} )R_f \nonumber \]
Por definición,
\[ I_{OS} = | I_{B+} − I_{B-} | \nonumber \]
así que finalmente llegamos a
\[ V_{out−offset(I_B)} = I_{OS} R_f \label{5.18} \]
Si es posible,\(R_{off}\) debe establecerse en\(R_i || R_f\). Esto reduce drásticamente el efecto de la corriente de polarización de entrada. Tenga en cuenta que el valor de\(R_{off}\) incluye la resistencia interna de la fuente de accionamiento. Si\(R_i || R_f = 2 k\Omega\) y la resistencia de la fuente de accionamiento es 100\(\Omega\), el valor de resistencia requerido sería 1.9 k\(\Omega\). Si no es posible\(R_{off}\) establecer el valor óptimo, al menos puede reducir el efecto de\(I_B\) usando un valor parcial. Además, tenga en cuenta que es posible determinar la polaridad del desplazamiento causado por\(I_{B+}\) y\(I_{B-}\) (Ecuación\ ref {5.17}) si se conocen las corrientes reales y el tipo de dispositivo utilizado en la etapa diff amp. El circuito de la Figura\(\PageIndex{1}\) supone que se están utilizando dispositivos NPN, de ahí que las corrientes se dibujan como entrando en el amplificador operacional. Los dispositivos de entrada PNP producirían la polaridad opuesta. Normalmente, sin embargo, no tenemos valores precisos para\(I_{B+}\) y\(I_{B-}\), y por lo tanto solo podemos calcular la magnitud del peor de los casos.
Para un resultado final, podemos combinar nuestros componentes:
\[ V_{out−offset} = V_{OS} A_{noise} + I_{OS} R_f \label{5.19} \]
si\(R_{off} = R_i || R_f \), y
\[ V_{out−offset} = V_{OS} A_{noise} +|I_{B+} R_{off} A_{noise} – I_{B} R_f| \label{5.20} \]
si\(R_{off} ≠ R_i || R_f \).
Hay un caso especial que involucra la selección de Roff, y que trata de un seguidor de voltaje. Normalmente para un seguidor,\(R_f = 0 \Omega\). ¿Y si la resistencia de la fuente impulsora es quizás 0\(\Omega\)? El cálculo requeriría una resistencia\(R_{off}\) de 0\(\Omega\), y por lo tanto una\(\Omega\) resistencia -50 para compensar la resistencia de la fuente. Esto es por supuesto, ¡imposible! Para compensar la\(\Omega\) fuente 50, use 50\(\Omega\) para\(R_f\). La ganancia del circuito seguirá siendo unidad, pero ahora\(I_B\) será compensada. Esto se muestra en la Figura\(\PageIndex{2}\).
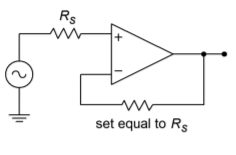
Figura\(\PageIndex{2}\): Compensación de desplazamiento para un seguidor.
Ejemplo\(\PageIndex{1}\)
Determine el voltaje de compensación de salida típico para el circuito de la Figura\(\PageIndex{3}\) si\(R_{off}\) es 0\(\Omega\). Luego determine un tamaño óptimo para\(R_{off}\) y calcule el nuevo desplazamiento.
De la ficha de datos para el 5534, encontramos\(V_{OS} = 0.5 mV\),\(I_{OS} = 10 nA\), y\(I_B = 800 nA\). Porque esto es una aproximación, supongamos\(I_{B+} = I_{B-} = I_{B}\).
\[ A_{noise} = 1+ \frac{R_f}{R_i} \nonumber \]
\[ A_{noise} = 1+ \frac{10 k}{1 k} \nonumber \]
\[ A_{noise} = 11 \nonumber \]
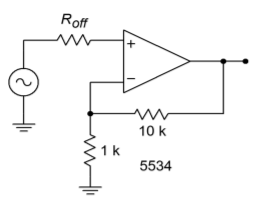
Figura\(\PageIndex{3}\): Circuito por Ejemplo\(\PageIndex{1}\).
\[ V_{out -offset} = V_{OS} A_{noise} + |I_{B+} R_{off} A_{noise} − I_{B-} R_f| \nonumber \]
\[ V_{out -offset} = 0.5mV\times 11+|800 nA\times 0\times 11−800 n A\times 10 k| \nonumber \]
\[ V_{out -offset} = 5.5mV+8mV \nonumber \]
\[ V_{out -offset} =13.5 mV \nonumber \]
Recuerde, esta es la magnitud del desplazamiento, podría estar en cualquier lugar dentro de\(\pm\) 13.5 mV. Podría ser peor si este no es un dispositivo típico. Ahora encontramos la resistencia compensadora de compensación óptima:
\[ R_{off} = R_i || R_f \nonumber \]
\[ R_{off} = 1 k || 10 k \nonumber \]
\[ R_{off} = 909 \Omega \nonumber \]
Para este caso, la ecuación de desplazamiento se reduce a
\[ V_{out−offset} = V_{OS} A_{noise} + I_{OS} R_f \nonumber \]
\[ V_{out−offset} = 0.5mV\times 11+10 nA\times 10 k \nonumber \]
\[ V_{out−offset} = 5.5mV+100\mu V \nonumber \]
\[ V_{out−offset} = 5.6mV \nonumber \]
Al agregar\(R_{off}\), el voltaje de compensación de salida se reduce a más de la mitad. Esto puede llevarte a pensar que siempre es prudente agregar\(R_{off}\). Tal no es el caso. Hay dos momentos en los que puede preferir dejarlo fuera: 1) para optimizar las características del ruido, como veremos en breve, y 2) cuando se utilizan amplificadores operacionales de entrada FET. Los dispositivos de entrada FET tienen corrientes de polarización de entrada y compensación muy pequeñas para empezar, por lo que su efecto es insignificante cuando se utilizan valores típicos de resistencia.
Ejemplo\(\PageIndex{2}\)
El circuito de la Figura\(\PageIndex{4}\) se utiliza como parte de un sistema de medición. Suponiendo que la señal de entrada de CC es de 3 mV, ¿cuánta incertidumbre hay en el voltaje de salida típicamente?
La salida deseada del amplificador es
\[ V_{out} = A_v V_{in} \nonumber \]
\[ V_{out} = − \frac{R_f}{R_i} V_{in} \nonumber \]
\[ V_{out} = − \frac{20 k}{5 k} 3 mV \nonumber \]
\[ V_{out} = −12 mV \nonumber \]
Las especificaciones típicas para el 411 son\(V_{OS} = 0.8 mV\)\(I_{OS} = 25 pA\),\(I_B = 50 pA\)
\[ A_{noise} = 1+ \frac{R_f}{R_i} \nonumber \]
\[ A_{noise} = 1+ \frac{20 k}{5 k} \nonumber \]
\[ A_{noise} = 5 \nonumber \]
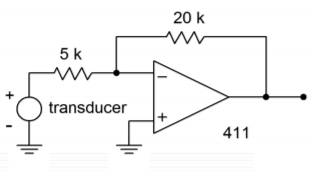
Figura\(\PageIndex{4}\): Circuito por Ejemplo\(\PageIndex{2}\).
\[ V_{out -offset} = V_{OS} A_{noise} +|I_{B+} R_{off} A_{noise} − I_{B-}R_f| \nonumber \]
\[ V_{out -offset} = 0.8mV\times 5+| 50 pA\times 0\times 11−50 pA\times 20 k | \nonumber \]
\[ V_{out -offset} = 4 mV+1\mu V \nonumber \]
\[ V_{out -offset} = 4 mV \nonumber \]
La salida puede variar hasta en\(\pm\) 4 mV. Como se trata de un sistema de medición de CC, los resultados son devastadores. La salida puede ser de -12 mV - 4 mV = -16 mV, a -12 mV + 4 mV = -8 mV. Eso es un spread 2:1, y es causado únicamente por el amplificador op. Tenga en cuenta que la adición de\(R_{off}\) tendría poco efecto aquí. Debido a que el 411 utiliza una entrada FET, su\(I_B\) contribución es de solo 1\(\mu\) V.
Entonces, ¿cómo mantienes al mínimo las compensaciones de salida? Primero y ante todo, asegúrese de que el amplificador operacional elegido tenga bajas\(I_{OS}\) y\(V_{OS}\) calificaciones. En segundo lugar, utilice la resistencia de compensación de desplazamiento,\(R_{off}\). Tercero, mantenga las resistencias del circuito lo más bajas posible. Finalmente, si el desplazamiento de salida sigue siendo demasiado grande, se puede reducir anulando manualmente el circuito.
La anulación implica sumar una pequeña señal que es de polaridad opuesta al desplazamiento existente. Al hacer esto, la nueva señal cancelará completamente el desplazamiento y la salida mostrará 0 V CC. Esto es mucho más fácil de lo que parece. La mayoría de los amplificadores operacionales tienen conexiones para circuitos nulos. Estos son especificados por el fabricante y suelen consistir en un solo potenciómetro y quizás una o dos resistencias. Un ejemplo de conexión de anulación se muestra en la Figura\(\PageIndex{5}\). Por lo general, el potenciómetro es un tipo de ajuste de varias vueltas para permitir un ajuste fino. Para anular el circuito, el técnico monitorea la salida con un voltímetro DC muy sensible. La entrada está conectada a tierra (o quizás atada a tierra a través de una resistencia igual a la resistencia de la fuente de accionamiento si es grande). Luego se ajusta el potenciómetro hasta que el medidor lee cero.
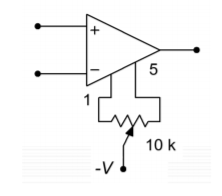
Figura\(\PageIndex{5}\): Una conexión de anulación típica.
El inconveniente de este procedimiento es que requiere que alguien (o tal vez alguna cosa) realice la anulación. Además, la unidad requerirá un ajuste periódico para compensar el envejecimiento y los efectos ambientales.
Simulación por Computadora
Como se indicó, es muy importante hacer coincidir las resistencias de entrada para mantener bajas las compensaciones. Esto se puede ver claramente en la simulación mostrada en la Figura\(\PageIndex{6}\). Un amplificador de voltaje no inversor se modela aquí usando el 741. Para enfocarse en el efecto de corriente de compensación, la contribución de\(V_{OS}\) se mantiene pequeña al mantener baja la ganancia de voltaje. La simulación se ejecuta dos veces para DC Operating Point. En el caso de que las resistencias coincidan, el voltaje de salida de CC es inferior a 1 mV. Para el caso inigualable,\(R_{off}\) se establece en una fracción de un Ohm. El voltaje de salida de CC resultante es mucho mayor a aproximadamente 17 mV. Cabe señalar que esto es aproximadamente igual a\(I_{bias}\) veces\(R_f\) (80 nA por 200 k\(\Omega\)). Esta simulación también señala el bajo rendimiento causado por valores de resistencia excesivamente grandes. Si la simulación se vuelve a ejecutar con las resistencias reducidas en tamaño, las compensaciones se reducirán.
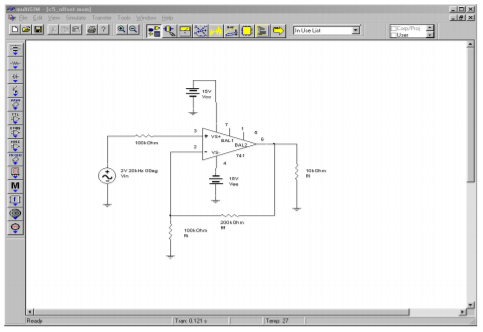
Figura\(\PageIndex{6a}\): Esquema Multisim para simulación de offset.
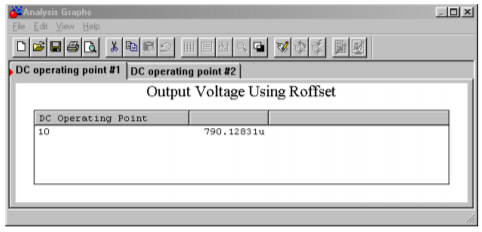
Figura\(\PageIndex{6b}\): Resultados con resistencia offset.
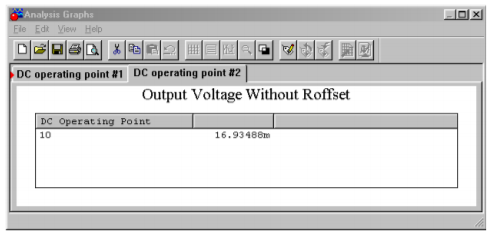
Figura\(\PageIndex{6c}\): Resultados sin resistencia offset.