
6.3: Amplificadores operativos programables
- Page ID
- 87609

Como se señala en el Capítulo Cinco, siempre hay una compensación entre la velocidad de un amplificador operacional y su consumo de energía. Para hacer un amplificador operacional rápido (es decir, alta velocidad de giro y\(f_{unity}\)), la corriente de carga para el condensador de compensación debe ser bastante alta. Otros requisitos también pueden aumentar el consumo de corriente del dispositivo. Esta situación no es diferente a la de un automóvil donde el alto kilometraje de combustible y la aceleración rápida tienden a ser mutuamente excluyentes. Los amplificadores operacionales están disponibles que se pueden configurar para niveles de rendimiento predeterminados. Si el dispositivo necesita ser muy rápido, el diseñador puede ajustar una tensión o resistencia externa y optimizar el dispositivo para la velocidad. En el otro extremo del espectro, el dispositivo se puede optimizar para un bajo consumo de energía. Debido a su capacidad para cambiar los parámetros operativos, estos dispositivos se denominan comúnmente amplificadores operacionales programables.
Generalmente, los amplificadores operacionales programables son como amplificadores operacionales de uso general, excepto que también incluyen una entrada de programación. Se llama a la corriente en este pin\(I_{set}\). \((I_{set}\)controla una serie de parámetros que incluyen la tasa de respuesta\(f_{unity}\), la corriente de polarización de entrada, la corriente de suministro en espera y otros. Un valor más alto de\(I_{set}\) aumentos\(f_{unity}\), tasa de respuesta, corriente de espera y corriente de polarización de entrada. El valor de\(I_{set}\) puede ser controlado por una fuente de corriente de transistor simple, o incluso una sola resistencia en la mayoría de los casos.
Un ejemplo de un amplificador operacional programable es el Texas Instruments LM4250. El contorno del LM4250 se muestra en la Figura\(\PageIndex{1}\). Dos posibles formas de ajuste\(I_{set}\) se muestran en las Figuras\(\PageIndex{2}\) y\(\PageIndex{3}\). Una variedad de gráficas que muestran la variación de los parámetros del dispositivo con respecto a se\(I_{set}\) muestran en la Figura\(\PageIndex{4}\). Como ejemplo, supongamos que\(I_{set}\) = 10\(\mu\) A y que estamos usando suministros estándar de\(\pm\) 15 V. A esta corriente, encontramos que\(f_{unity}\) es de 230 kHz, la velocidad de giro es de 0.21 V/\(\mu\) s, y el consumo de corriente en espera es de 50\(\mu\) A. El consumo de corriente es decididamente menor que el de un 741. Esto hace que el dispositivo sea muy atractivo para aplicaciones donde el consumo de energía debe mantenerse al mínimo. Los sistemas operados por baterías generalmente entran en la categoría de bajo consumo de energía. Al mantener la corriente baja, la duración de la batería se extiende.
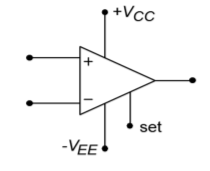
Figura\(\PageIndex{1}\): Conexiones básicas del LM4250.
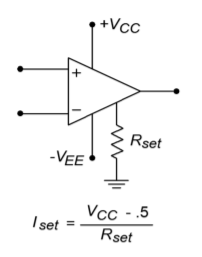
Figura\(\PageIndex{2}\): Programación vía resistor.
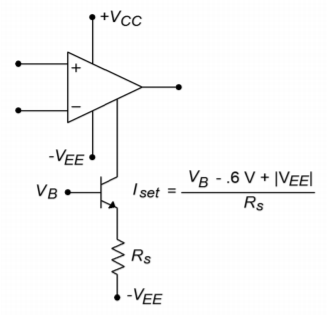
Figura\(\PageIndex{3}\): Programación vía voltaje.
Quizás la característica más fuerte de esta clase de dispositivos es su capacidad para entrar en un modo de apagado. Cuando el dispositivo está sentado en ralentí y no se usa, se\(I_{set}\) puede bajar, y así la corriente de espera baja considerablemente. Por ejemplo, si\(I_{set}\) para el LM4250 se baja a 100 nA, la corriente de espera cae a menos de 1\(\mu\) A. Al hacer esto, el dispositivo solo puede disipar unos pocos microvatios de energía durante los períodos de inactividad. Cuando el amplificador operacional de nuevo necesita ser utilizado para la amplificación, se\(I_{set}\) puede volver a llevar a un nivel normal. Esta forma de rendimiento ajustable en tiempo real se puede instituir con un voltaje de control simple y una disposición de fuente de corriente de transistor como en la Figura\(\PageIndex{3}\).
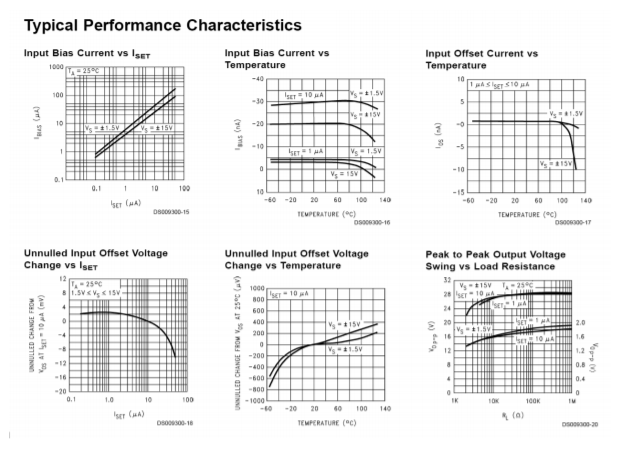
Figura\(\PageIndex{4}\): Curvas del dispositivo LM4250. Reimpreso cortesía de Texas Instrutments
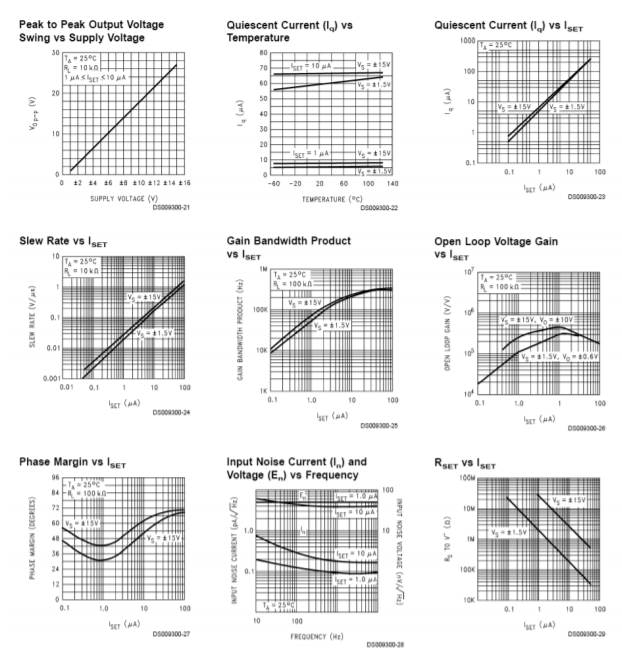
Figura\(\PageIndex{4}\) (continuación): Curvas del dispositivo LM4250. Reimpreso cortesía de Texas Instrutments
Ejemplo\(\PageIndex{1}\)
Determine el ancho de banda de potencia\(V_p = 10 V\) para Para el circuito de la Figura\(\PageIndex{5}\). También encuentra\(f_2\). \(\pm\)Se utilizan fuentes de alimentación de 15 V.
Para poder encontrar estas cantidades, necesitamos la tasa de giro y\(f_{unity}\). Estos son controlados por\(I_{set}\), por lo que encontrar\(I_{set}\) es el primer orden del día.
\[ I_{set} = \frac{V_{CC} − 0.5}{R_{set}} \nonumber \]
\[ I_{set} = \frac{15−0.5}{3MΩ} \nonumber \]
\[ I_{set} = 4.83\mu A \nonumber \]
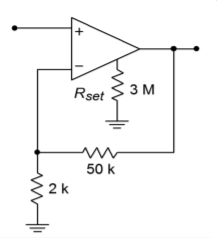
Figura\(\PageIndex{5}\): Circuito por Ejemplo\(\PageIndex{1}\).
De la gráfica “Ganancia-Ancho de Banda Producto versus\(I_{set}\)” encontramos que 4.83\(\mu\) A produce una\(f_{unity}\) de aproximadamente 200 kHz. La gráfica “Tasa de giro versus Iset” produce aproximadamente 0.11 V/\(\mu\) s para la tasa de rotación.
\[ A_{noise} = 1+ \frac{R_f}{R_i} \nonumber \]
\[ A_{noise} = 1+ \frac{50 k}{2 k} \nonumber \]
\[ A_{noise} = 26 \nonumber \]
\[ f_2 = \frac{f_{unity}}{A_{noise}} \nonumber \]
\[ f_2 = \frac{200 kHz}{26} \nonumber \]
\[ f_2 = 7.69kHz \nonumber \]
\[ f_{max} = \frac{SR}{2\pi V_p} \nonumber \]
\[ f_{max} = \frac{0.11V /\mu S}{2 \pi \times 10 V} \nonumber \]
\[ f_{max} = 1.75 kHz \nonumber \]
Como puede ver, una vez que se encuentran los parámetros establecidos actuales y asociados, el análisis procede como en cualquier amplificador operacional de propósito general.