
10.3: Diferenciadores
- Page ID
- 87798

Los diferenciadores realizan la función complementaria al integrador. La forma base del diferenciador se muestra en la Figura\(\PageIndex{1}\). El voltaje de salida es el diferencial del voltaje de entrada. Esto es muy útil para encontrar la velocidad a la que una señal varía con el tiempo. Por ejemplo, es posible encontrar la velocidad dada la distancia y la aceleración dada la velocidad. Esto puede ser muy útil en el trabajo de control de procesos.
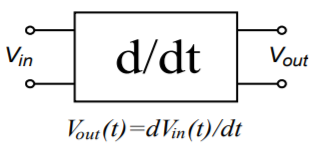
Figura\(\PageIndex{1}\): Un diferenciador básico
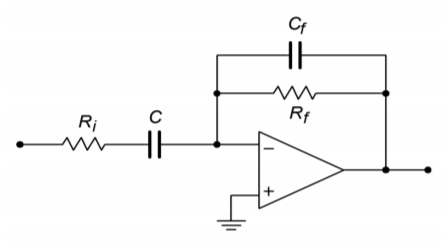
Esencialmente, el diferenciador tiende a reforzar las transiciones de señal rápidas. Si la forma de onda de entrada no cambia, (es decir, DC), la pendiente es cero, y así la salida del diferenciador es cero. Por otro lado, un cambio brusco de señal como el borde ascendente de una onda cuadrada produce una pendiente muy grande, y así la salida del diferenciador será grande. Para crear la diferenciación, se necesita asociar un dispositivo apropiado con el circuito de amplificador operacional. Este fue el enfoque que se tomó con el integrador, y sigue siendo válido aquí. De hecho, nos quedan las mismas dos opciones: usar ya sea un inductor, o un condensador. Nuevamente, los capacitores tienden a ser algo más fáciles de trabajar que los inductores y se prefieren. La única diferencia entre el integrador y el diferenciador es la posición del condensador. En lugar de colocarlo en la\(R_f\) posición, el condensador se colocará en la\(R_i\) posición. El circuito resultante se muestra en la Figura\(\PageIndex{2}\).
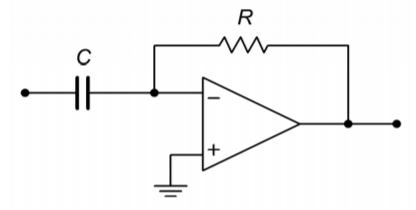
Figura\(\PageIndex{2}\): Diferenciador de amplificador operacional simple.
El análisis comienza con la ecuación básica del condensador (Ecuación 10.2.1):
\[i(t) = C \frac{dv(t)}{dt} \nonumber \]
Ya sabemos por trabajos anteriores que la tensión de salida aparece a través\(R_f\), aunque invertida.
\[V_{out} = −V_{Rf} \nonumber \]
Además, por la ley de Ohm,
\[V_{Rf} = iR_{f} \nonumber \]
Al usar la aproximación por la que fluye toda la corriente de entrada\(R_f\) (ya que la corriente de entrada del amplificador operacional es cero), y luego sustituyendo la ecuación 10.2.1 por la corriente, encontramos
\[V_{out}(t) = −R_f C \frac{dv (t)}{dt} \nonumber \]
Una inspección rápida del circuito muestra que todo el voltaje de entrada cae a través del condensador, porque la entrada de inversión del amplificador operacional es una conexión a tierra virtual. Teniendo esto en cuenta, llegamos a la ecuación final de voltaje de salida,
\[V_{out}(t) = −R_f C \frac{dV_{i n}(t)}{dt} \label{10.8} \]
Al igual que con el integrador, se agrega una constante líder a la forma fundamental. Nuevamente, es posible escalar la salida según se requiera mediante el uso de redes de ganancia o atenuación.
10.3.1: Precisión y Utilidad de la Diferenciación
La ecuación\ ref {10.8} es una reflexión precisa de la respuesta del circuito siempre que las suposiciones base sigan siendo válidas. Al igual que con el integrador, las consideraciones prácticas tienden a forzar límites en el rango de operación del circuito. Si el circuito se analiza en puntos discretos en el dominio de la frecuencia, se puede modelar como un amplificador inversor con la siguiente ecuación de ganancia:
\[A_v = − \frac{R_f}{X_C} = −2 \pi f C R_f \nonumber \]
Tenga en cuenta que a medida que la frecuencia disminuye, X_C crece, reduciendo así la ganancia. Por el contrario, a medida que se eleva la frecuencia de entrada, X_C cae de valor, haciendo que la ganancia suba. Esta subida continuará hasta que intersecta la respuesta de bucle abierto del amplificador operacional. La respuesta de amplitud resultante se muestra en la Figura\(\PageIndex{3}\).
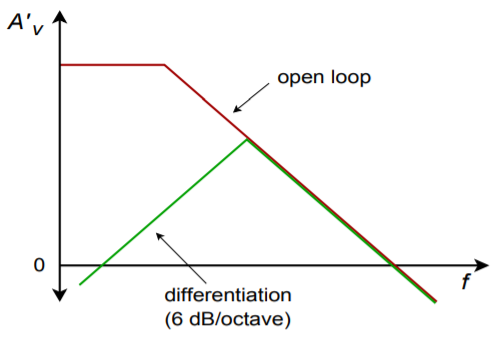
Figura\(\PageIndex{3}\): Respuesta de un diferenciador simple.
Esta respuesta es la imagen especular de la respuesta básica del integrador y presenta una pendiente de 6 dB por octava. Tenga en cuenta que la ganancia de CC es cero y, por lo tanto, los problemas creados por las corrientes de polarización y compensación de entrada no son tan problemáticos como en el integrador. Debido a esto, no hay límite en cuanto a qué tan baja puede ser la frecuencia de entrada, excluyendo los efectos de la relación señal/ruido. Sin embargo, las cosas son considerablemente diferentes en la gama alta. Una vez que la respuesta del circuito se separa de la pendiente ideal de 6 dB por octava, la diferenciación ya no tiene lugar.
10.3.2: Optimización del Diferenciador
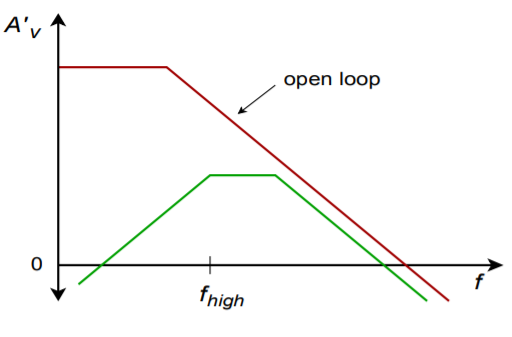
Hay un par de problemas con el diferenciador general de Figura\(\PageIndex{2}\). En primer lugar, es muy posible que el circuito se vuelva inestable a frecuencias más altas. Además, la forma básica de la respuesta de amplitud sugiere que se acentúan las frecuencias altas, aumentando así el nivel de ruido relativo. Ambos problemas pueden reducirse al proporcionar una frecuencia artificial de límite superior,\(f_{high}\). Esta adaptación se puede lograr mediante derivación\(R_f\) con un pequeño condensador. Esto reduce la ganancia de alta frecuencia y, por lo tanto, reduce el ruido. La respuesta resultante se muestra en la Figura\(\PageIndex{4}\).
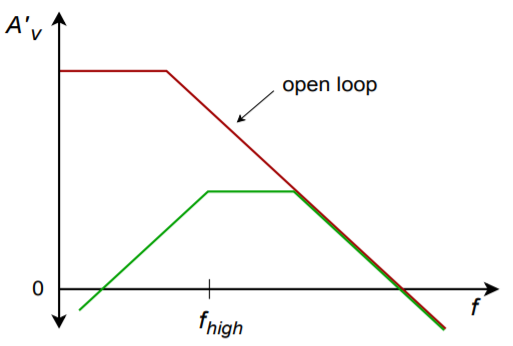
Figura\(\PageIndex{4}\): Respuesta de un diferenciador parcialmente optimizado.
Encontramos de\(f_{high}\) la manera estándar:
\[f_{high (fdbk)} = \frac{1}{2 \pi R_f C_f} \label{10.9} \]
\(f_{high}\)representa la frecuencia más alta para la diferenciación. Es el punto de precisión del 50%. Para mayor precisión, la frecuencia de entrada debe mantenerse muy por debajo\(f_{high}\). Aproximadamente a 0.1\(f_{high}\), la precisión de la Ecuación\ ref {10.8} es de aproximadamente el 99%. Generalmente, hay que ser algo más conservador en la estimación de precisión que con el integrador. Esto se debe a que las ondas complejas contienen armónicos que son más altos que los fundamentales. Aunque lo fundamental puede estar dentro del rango de alta precisión, los armónicos superiores pueden no estarlo.
El otro problema importante del circuito básico es que la impedancia de entrada es inversamente proporcional a la frecuencia de entrada. Esto se debe a que\(X_C\) es el único factor de impedancia de entrada. Esto puede presentar un problema a frecuencias más altas debido a que la impedancia se aproximará a cero. Para evitar este problema, se puede colocar una resistencia en serie con el condensador de entrada para establecer un valor de impedancia mínimo. Desafortunadamente, esto también creará una frecuencia de ruptura superior,\(f_{high}\).
\[f_{high (in)} = \frac{1}{2 \pi R_f C} \label{10.10} \]
La respuesta resultante se muestra en la Figura\(\PageIndex{5}\). El efectivo\(f_{high}\) para el sistema será el menor de Ecuaciones\ ref {10.9} y\ ref {10.10}.
Figura\(\PageIndex{7}\): Respuesta de un diferenciador práctico.
El diferenciador práctico completado se muestra en la Figura\(\PageIndex{8}\). Tenga en cuenta que es posible que se requiera una resistencia de compensación de polarización en la entrada no inversora, aunque no se muestra.
Figura\(\PageIndex{8}\): Un diferenciador práctico.
10.3.3: Análisis de Diferenciadores con el Método Tiempo-Continuo
El método continuo de tiempo se utilizará cuando la señal de entrada pueda escribirse fácilmente en el dominio del tiempo (por ejemplo, ondas sinusoidales). Para formas de onda más complejas, como una onda triangular, se utilizará un método de tiempo discreto. El método continuo conducirá directamente a una representación en el dominio del tiempo de la forma de onda de salida. No se evaluarán las coordenadas específicas de voltaje/tiempo.
Ejemplo\(\PageIndex{1}\)
Determinar el rango útil para la diferenciación en el circuito de la Figura\(\PageIndex{9}\). También determine el voltaje de salida si la señal de entrada es una onda sinusoidal pico de 2 V a 3 kHz.
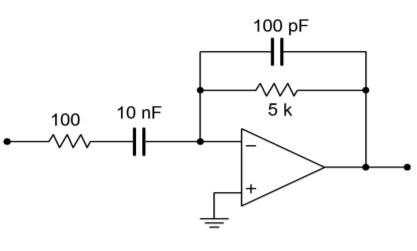
Figura\(\PageIndex{9}\): Diferenciador por Ejemplo\(\PageIndex{1}\).
El límite superior del rango de frecuencia útil será determinado por la inferior de las dos\(RC\) redes.
\[f_{high (fdbk)} = \frac{1}{2 \pi R_f C_f} \\ f_{high (fdbk)} = \frac{1}{2 \pi \times 5 k \times 100 pF} \\ f_{high (fdbk)} = 318.3 kHz \\ f_{high (in)} = \frac{1}{2 \pi R_f C} \\ f_{high (in)} = \frac{1}{2 \pi \times 100 \times 10 nF} \\ f_{high (in)} = 159.2 kHz \nonumber \]
Por lo tanto, el límite superior es de 159.2 kHz. Recuerde, la precisión en este límite es relativamente baja, y el funcionamiento normal normalmente será varias octavas más bajo que este límite. Tenga en cuenta que la frecuencia de entrada es de 3 kHz, por lo que debería resultar una alta precisión. Primero, escribe\(V_{in}\) como una expresión en el dominio del tiempo:
\[V_{in}(t) = 2 \sin 2 \pi 3000 t \\ V_{out}(t) = −R_f C \frac{dV_{in} (t)}{dt} \\ V_{out}(t) = −5 k \times 10 nF \frac{d 2 \sin 2 \pi 3000t}{dt} \\ V_{out}(t) = −10^{−4} \frac{d \sin 2 \pi 3000t}{dt} \\ V_{out}(t) = −1.885 \cos 2 \pi 3000t \nonumber \]
Esto nos dice que la forma de onda de salida también es sinusoidal, pero retarda 90 la entrada\(^{\circ}\). Tenga en cuenta que la frecuencia de entrada no ha cambiado, pero la amplitud sí. El diferenciador opera con una pendiente de 6 dB por octava, por lo que se puede observar que la amplitud de salida es directamente proporcional a la frecuencia de entrada. Si este ejemplo se vuelve a ejecutar con una frecuencia de 6 kHz, la amplitud de salida será el doble del valor presente.
Simulación por Computadora
La simulación Multisim para el circuito de Ejemplo\(\PageIndex{1}\) se muestra en la Figura\(\PageIndex{10}\). Tenga en cuenta la excelente correlación tanto para la fase como para la amplitud de la salida. Como fue el caso de la simulación del integrador, la gráfica de salida de Análisis Transitorio se inicia después de que se hayan establecido las condiciones iniciales.
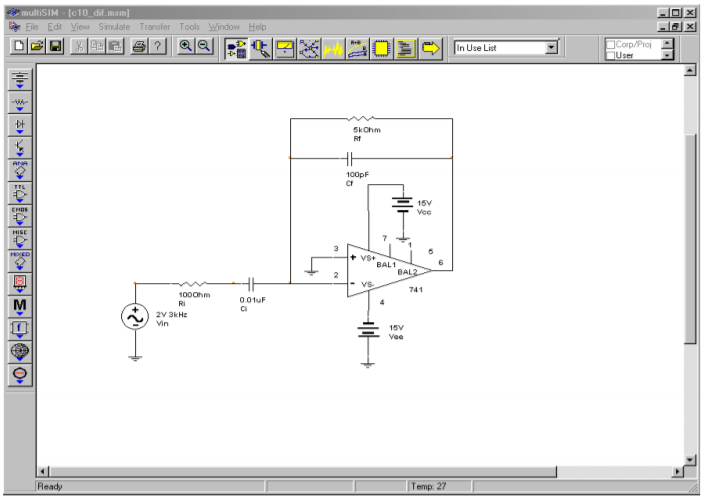
Figura\(\PageIndex{10a}\): Diferenciador en Multisim.
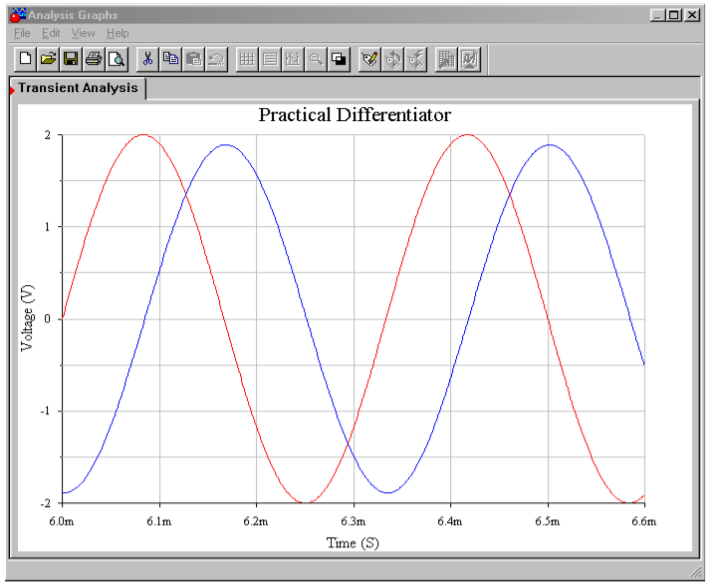
Figura\(\PageIndex{10b}\): Diferenciador de formas de onda de entrada y salida.
10.3.4: Análisis de Diferenciadores con el Método Tiempo-Discreto
Para formas de onda más complejas, a veces es conveniente romper la forma de onda en trozos discretos, diferenciar cada porción y luego combinar los resultados. La idea es romper la forma de onda en segmentos equivalentes de línea recta. La diferenciación de un segmento de línea recta dará como resultado una constante (es decir, la pendiente, que no cambia en ese tiempo). El proceso se repite hasta que se completa un ciclo de la forma de onda de entrada. Los niveles resultantes se unen gráficamente para producir la forma de onda de salida.
A menudo, las formas de onda son simétricas, y solo se necesita realizar una parte del cálculo: un cambio de signo es todo lo que se necesitará para las porciones de imagen especular. Como ejemplo, una onda triangular se puede romper en un segmento de línea positiva y un segmento de línea de ida negativo. Las pendientes deben ser iguales, solo ha cambiado la dirección (i.e., signo). Una onda cuadrada puede dividirse en cuatro partes: un borde positivo, un valor positivo estático, un borde negativo y un valor negativo estático. Las porciones “planas” tienen una pendiente de cero, por lo que solo se debe realizar un cálculo, y ese es el borde positivo. Vamos a echar un vistazo a ambas formas de onda en los siguientes dos ejemplos.
Ejemplo\(\PageIndex{2}\)
Esboce la forma de onda de salida para el circuito de la Figura\(\PageIndex{9}\) si la entrada es una onda triangular pico de 3 voltios a 4 kHz.
Primero, tenga en cuenta que la frecuencia de entrada está bien dentro del rango útil de este circuito, según se calcula en Ejemplo\(\PageIndex{1}\). (Tenga en cuenta que los armónicos más altos seguirán estando fuera de rango, pero el error introducido será menor).
La onda triangular se puede romper en una porción positiva y una porción negativa. En cualquier caso, el cambio de voltaje total será de 6 V en un medio ciclo. El periodo de la forma de onda es
\[T = \frac{1}{4 kHz} \\ T = 250 \mu s \nonumber \]
Por lo tanto, para la porción positiva, se verá un cambio de 6 voltios en 125\(\mu\) s (−6 V en 125\(\mu\) s para la porción negativa). La pendiente es
\[Slope = \frac{6 V}{125 \mu s} \\ Slope = 48000 V/s \nonumber \]
Que, como expresión en el dominio del tiempo es
\[V_{in}(t) = 48000t \nonumber \]
Sustituyendo esta Ecuación en Ecuación\ ref {10.8} rendimientos
\[V_{out}(t) = −R_f C \frac{dV_{in}(t)}{dt} \\ V_{out}(t) = −5 k \times 10 nF \frac{d 48000 t}{dt} \\ V_{out}(t) = −2.4 V \nonumber \]
Durante\(t = 0\) a través de\(t = 125 \mu\) s, la salida es −2.4 V. La diferenciación de la segunda mitad de la onda es similar, pero produce una salida positiva, +2.4 V. El resultado es una onda cuadrada de 4 kHz que es pico de 2.4 V. La forma de onda resultante se muestra en la Figura\(\PageIndex{11}\).
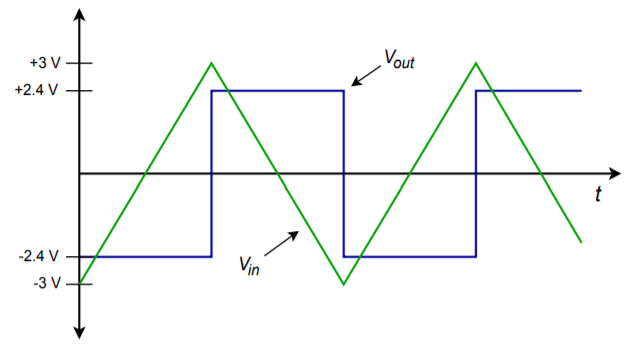
Figura\(\PageIndex{11}\): Formas de onda de entrada/salida.
Simulación por Computadora
Algunos circuitos son más sensibles a la elección del amplificador operacional que otros, y los efectos de una elección incorrecta pueden no ser siempre evidentes de inmediato sin primero construir o simular el circuito. Un buen ejemplo de esto se muestra en la Figura\(\PageIndex{12}\). Se utilizó Multisim para crear el Análisis Transitorio para el circuito de Ejemplo\(\PageIndex{2}\) con dos amplificadores operacionales diferentes. La diferenciación precisa requiere una excelente respuesta de alta frecuencia del amplificador operacional. En la primera simulación, se utiliza un amplificador operacional 741. Este dispositivo no es particularmente rápido. Como resultado, la forma de onda de salida sufre de sobreimpulso y timbre excesivos. Además, la limitación de la velocidad de rotación es bastante obvia, lo que ralentiza las transiciones de la forma de onda de salida. En contraste, el uso de un LF411 en el mismo circuito produce una respuesta muy superior. Todavía existe cierto rebasamiento, pero su magnitud ha sido restringida, al igual que el timbre. Además, la limitación de la tasa de rotación se reduce por un amplio margen. Claramente, el segundo resultado está mucho más cerca del cálculo ideal que la primera ejecución.
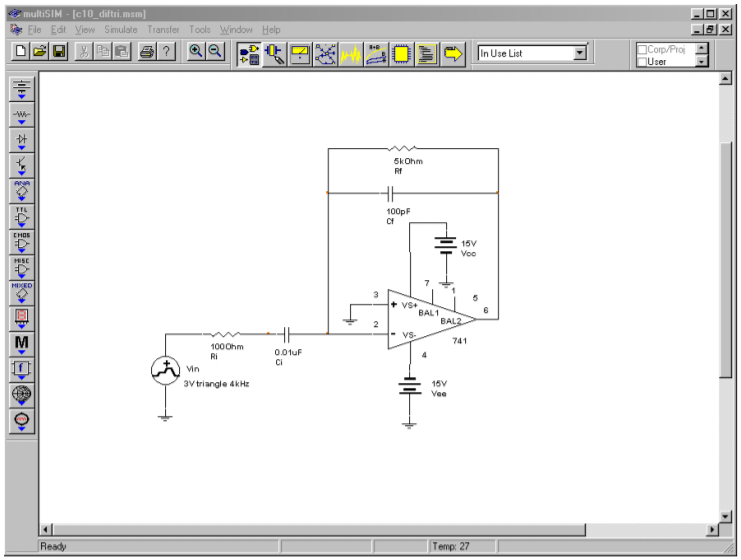
Figura\(\PageIndex{12a}\): Esquema multisim del diferenciador.
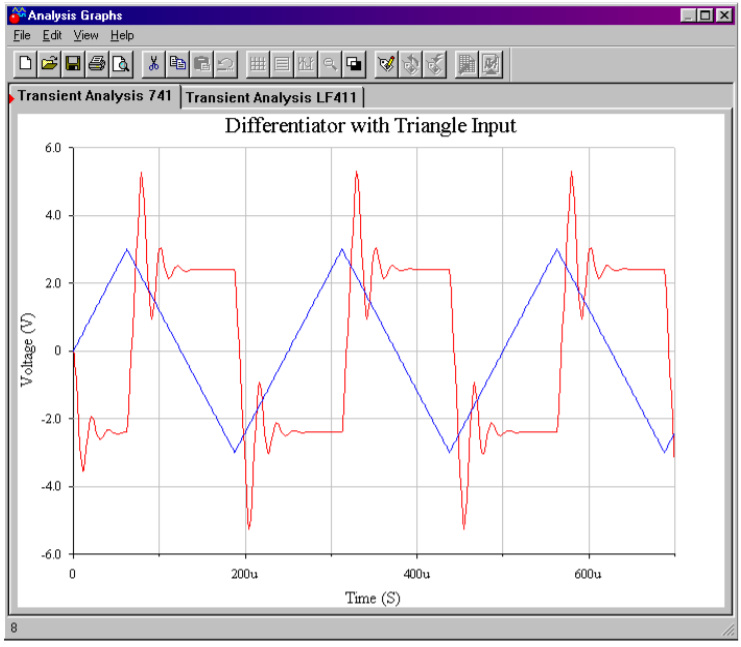
Figura\(\PageIndex{12b}\): Formas de onda de entrada y salida usando 741.
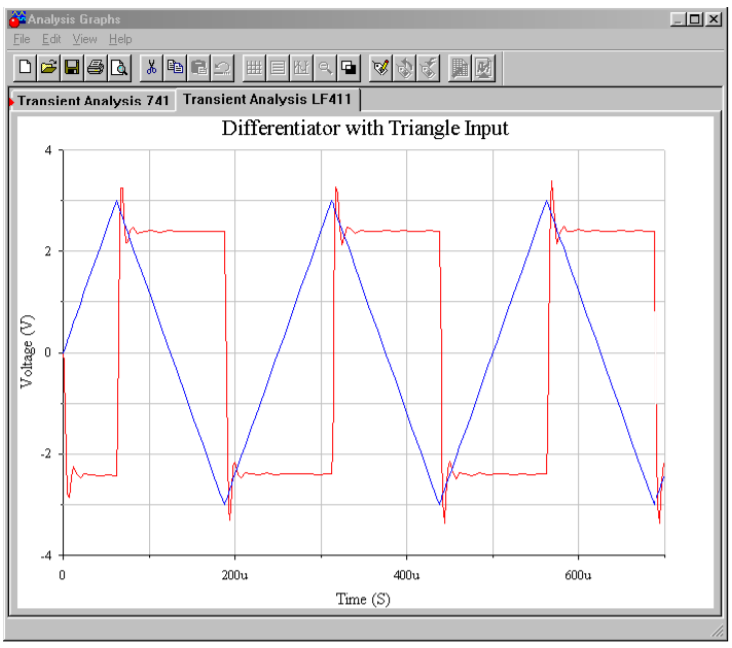
Figura\(\PageIndex{12c}\): Formas de onda de entrada y salida usando LF411.
Ejemplo\(\PageIndex{3}\)
Repita Ejemplo\(\PageIndex{2}\) con un pico de 3 V, cuadrado de 4 kHz como entrada. Supongamos que los bordes ascendentes y descendentes de la onda cuadrada se han limitado a 5 V/\(\mu\) s.
Durante los periodos de tiempo que la entrada está en\(\pm 3\) V, la salida será cero. Esto se debe a que la pendiente de entrada es, por definición, cero cuando la señal es “plana”. Una salida solo se anota durante las transiciones entre los niveles\(\pm 3\) V. Por lo tanto, necesitamos encontrar la pendiente de las transiciones. Se afirmó que debido a la limitación de la velocidad de giro (quizás de alguna etapa previa del amplificador) las transiciones se ejecutan a 5 V/\(\mu\) s. Como expresión en el dominio del tiempo, esto es
\[V_{i n} (t) = 5 \times 10^6 t \nonumber \]
Sustituyendo esta Ecuación por la Ecuación\ ref {10.8} rinde,
\[V_{out}(t) = −R_f C \frac{dV_{i n} (t)}{dt} \\ V_{out}(t) = −5 k 10 nF \frac{ d 5 \times 10^6 t}{dt} \\ V_{out}(t) = −250V \nonumber \]
Obviamente, cuando se usa un amplificador operacional estándar y una fuente de alimentación en\(\pm 15\) V, se producirá un recorte en las proximidades de −13.5 V. Para el borde negativo, se verá un resultado similar (+250 V calculado, con recorte a +13.5 V). La forma de onda resultante se muestra en la Figura\(\PageIndex{13}\). Tenga en cuenta que los picos de forma de onda de salida también estarán limitados por la velocidad de rotación del amplificador operacional del diferenciador.
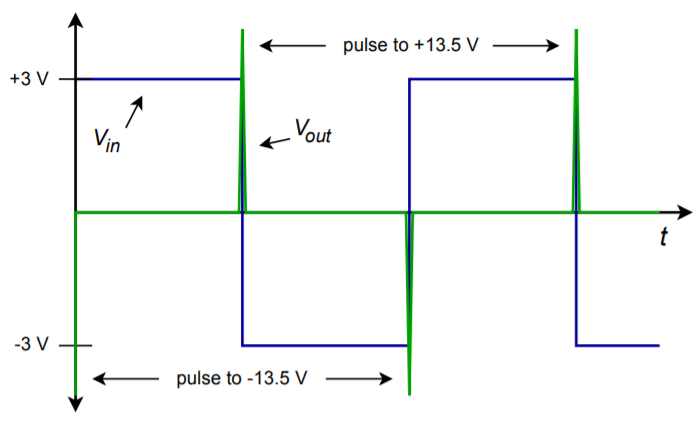
Figura\(\PageIndex{13}\): Onda cuadrada diferenciada (recorte de salida de nota).
Ejemplo\(\PageIndex{4}\)
La figura\(\PageIndex{14}\) muestra un diferenciador que recibe una señal de un LVDT, o transformador diferencial variable lineal 1. Un LVDT se puede utilizar para medir con precisión la posición de objetos con desplazamientos de menos de una milésima de pulgada. Esto podría ser útil en un sistema de fabricación asistido por computadora. Diferenciando esta señal de posición, se puede derivar una señal de velocidad. Una segunda diferenciación producirá aceleración. Si el LVDT produce la onda mostrada en la Figura\(\PageIndex{14}\), determine la curva de velocidad/tiempo para el objeto que se está rastreando.
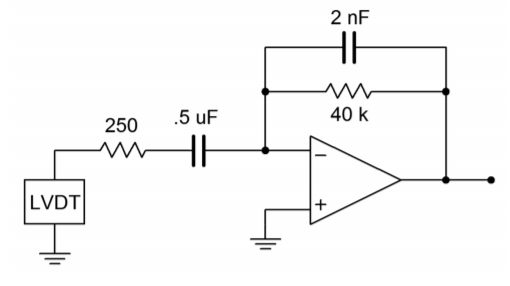
Figura\(\PageIndex{14a}\): Circuito diferenciador con LVDT.
Primero, verifique el límite de frecuencia superior para el circuito.
\[f_{high( fdbk )} = \frac{1}{2 \pi R_f C_f} \\ f_{high( fdbk )} = \frac{1}{2 \pi \times 40 k \times 2 nF } \\ f_{high( fdbk )} = 1.99 kHz \\ f_{high( in )} = \frac{1}{2 \pi R_i C} \\ f_{high( in )} = \frac{1}{2 \pi \times 250 \times 500 nF} \\ f_{high( in )} = 1.273 kHz \nonumber \]
El límite será el inferior de los dos, o 1.273 kHz. Esto está muy por encima de la señal de entrada que cambia lentamente y, por lo tanto, debería ser posible una alta precisión.
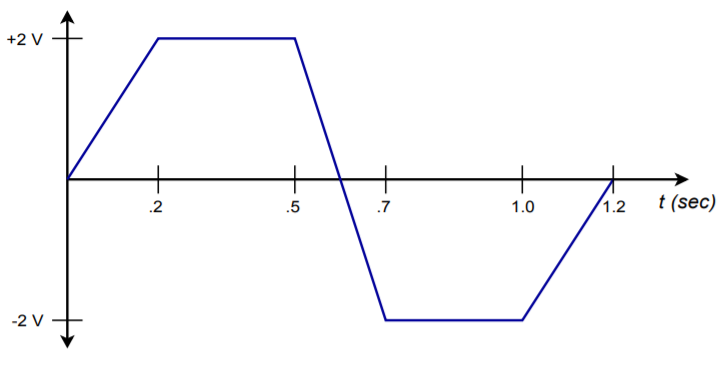
Figura\(\PageIndex{14b}\): Señal producida por LVDT.
Esta ola puede ser analizada de manera fragmentada. Las porciones de rampa producirán niveles de salida constantes y las porciones planas producirán una salida de 0 V (es decir, la tasa de cambio es cero).
Para la primera sección,
\[Slope = \frac{2V}{0.2s} \\ Slope = 10V/s \nonumber \]
Que, como expresión en el dominio del tiempo, es
\[V_{in} (t) = 10 t \\ V_{out}(t) = −R_f C \frac{dV_{in} (t)}{dt} \\ V_{out}(t) = −40 k \times 500 nF \frac{d 10t}{dt} \\ V_{out}(t) = −0.2V \nonumber \]
Entonces, durante\(t = 0\) a través de\(t = 0.2\) s, la salida es −0.2 V. El período de tiempo entre 0.2 s y 0.5 s producirá una salida de 0 V. Para la porción negativa,
\[Slope = \frac{−4V}{0.2s} \\ Slope = −20V/s \quad \text{ thus,} \\ V_{i n} (t) = −20 t \\ V_{out}(t) = −R_f C \frac{dV_{i n} (t)}{dt} \\ V_{out}(t) = −40 k 500 nF \frac{d 20t}{dt} \\ V_{out}(t) = 0.4 V \nonumber \]
La salida es de 0.4 V entre 0.5 s y 0.7 s. La tercera sección tiene la misma pendiente que la primera sección, y también producirá un nivel de −0.2 V. La forma de onda de salida se dibuja en la Figura\(\PageIndex{15}\).
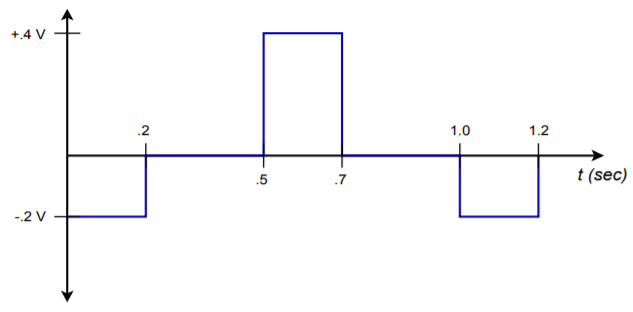
Figura\(\PageIndex{15}\): Salida del diferenciador.
Referencias
1 Un LVDT es un transformador con devanados secundarios duales y un núcleo móvil. El núcleo está conectado a un eje, que a su vez es accionado por algún objeto externo. El movimiento del núcleo altera la inductancia mutua entre primaria y secundaria. Una señal portadora se alimenta al primario, y la inductancia mutua cambiante altera la intensidad de la señal inducida en los secundarios. Este cambio de señal se convierte en un simple voltaje de CC por un demodulador. El potencial de CC resultante es proporcional a la posición del núcleo y, por lo tanto, proporcional a la posición del objeto bajo medición.