
12.4: Técnicas de conversión digital a analógica
- Page ID
- 87847

El convertidor básico de digital a analógico es poco más que un amplificador sumador ponderado. Cada bit sucesivo en la palabra digital representa un nivel que es dos veces más grande que el bit anterior. Si cada bit se toma como una corriente o voltaje dado, los niveles crecientes se pueden producir usando diferentes ganancias en las entradas de suma. Un convertidor simple de cuatro bits se muestra en la Figura\(\PageIndex{1}\).
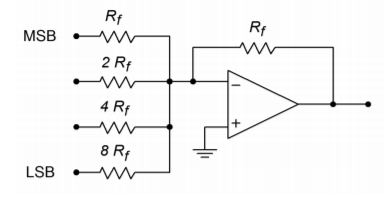
Figura\(\PageIndex{1}\): Un sencillo conversor de 4 bits.
Este sistema puede representar\(2^4\), o 16, diferentes niveles. Cada entrada es impulsada por un simple nivel lógico alto/bajo que representa un 1 o 0 para ese bit en particular. Tenga en cuenta que las resistencias de entrada varían según factores de 2. La ganancia para el camino más alto es\(R_f/R_f\), o unidad. Esta entrada se utiliza para el bit más significativo de la palabra de entrada (MSB). La siguiente entrada muestra una ganancia de\(R_f / (2R_f)\), o 0.5. La tercera entrada muestra una ganancia de 0.25, y la entrada final muestra una ganancia de 0.125. La entrada final tiene la ganancia más baja y se utiliza para el bit menos significativo de la palabra de entrada (LSB). Si la palabra de entrada tuviera una resolución más alta (es decir, más bits), se agregarían canales adicionales, cada uno teniendo la mitad de la ganancia de la entrada anterior. Para entender mejor el proceso de conversión, echemos un vistazo a algunas entradas y salidas representativas.
El circuito de la Figura\(\PageIndex{1}\) puede ser accionado por circuitos lógicos simples de tipo TTL de 5 V. 5 V representa un alto lógico, mientras que 0 V representa un bajo lógico. ¿Cuál es el nivel de salida si la palabra de entrada es 0100? Debido a que un alto lógico representa 5 V, se está aplicando 5 V a la segunda entrada. Todas las demás entradas reciben un bajo lógico, o 0 V. La salida es la suma de las señales de entrada (recuerde, este es un verano inversor, por lo que la salida final debe tener su signo invertido).
\[V_{out} = − (V_{in1} A_1 + V_{in2} A_2 + V_{in3} A_3 + V_{in4} A_4 ) \\ V_{out} = −(0 V \times 1 + 5 V \times 0.5 + 0 V \times 0.25 + 0 V \times 0.125) \\ V_{out} = −2.5 V \nonumber \]
Entonces, un valor de 4 (binario 100) equivale a un potencial de 2.5 V. Si aumentamos el valor de la palabra a 9 (binario 1001), vemos
\[V_{out} = − (V_{in1} A_1 + V_{in2} A_2 + V_{in3} A_3 + V_{in4} A_4 ) \\ V_{out} = −(5V \times 1 + 0 V \times 0.5 + 0 V \times 0.25 + 5V \times 0.125) \\ V_{out} = −5.625 V \nonumber \]
La salida mínima ocurre en 0000 binarios, (0 V) y el máximo en 1111 binarios (−9.375 V). El tamaño del paso es igual al nivel lógico por la ganancia mínima; en este caso eso es 0.625 V. Observe que el valor de salida se puede encontrar simplemente multiplicando el valor de la palabra de entrada por el tamaño mínimo de paso. Además, es importante señalar que la señal de salida es unipolar (en este ejemplo, siempre negativa).
Una representación digital, por supuesto, se compone de una secuencia de palabras, no de una sola palabra. En realidad, los circuitos lógicos están alimentando constantemente al amplificador sumador nuevas palabras a una velocidad predeterminada. Debido a las entradas cambiantes, la salida del convertidor también cambia constantemente. Usando nuestros valores previamente calculados, si el convertidor se alimenta la secuencia,\(0000, 0100, 1001, 1111,\) la salida se moverá de 0 V a −2.5 V, a −5.625 V, a un valor final de −9.375 V. Esta salida se grafica en la Figura\(\PageIndex{2}\).
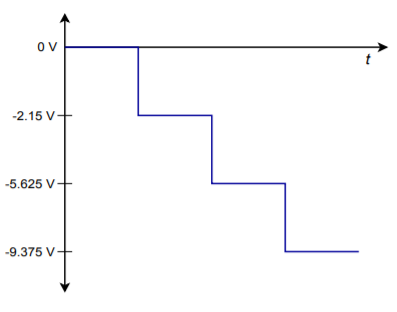
Figura\(\PageIndex{2}\): Salida con cuatro palabras digitales.
Si esta secuencia se repite una y otra vez, la forma de onda de la Figura\(\PageIndex{3}\) es el resultado. Tenga en cuenta que se crea una onda tipo “escalón”. También podrías pensar en esto como una forma muy aproximada de una función de rampa. Se produciría una mejor rampa si usáramos todos los valores disponibles para la secuencia de entrada, como en\(0000, 0001, 0010, 0011, \dots , 1111\). Para eliminar el desplazamiento negativo de CC y hacer que la señal sea bipolar, todo lo que necesitamos hacer es pasar la señal a través de un condensador de acoplamiento. La frecuencia de esta forma de onda es controlada por la velocidad a la que las palabras son alimentadas al convertidor. Tenga en cuenta que al aumentar la resolución y el número de palabras alimentadas al convertidor por ciclo, se puede lograr una aproximación muy cercana a la función de rampa ideal. Para el caso, cambiando las palabras de entrada a otras secuencias, podemos crear una amplia variedad de formas de onda de salida. Este es el concepto detrás del generador de funciones arbitrarias digitales. Un generador de funciones arbitrarias le permite crear formas de onda más allá del simple seno/cuadrado/triángulo que se encuentra en el generador de funciones de laboratorio típico. Vamos a echar un vistazo más de cerca a esta pieza particular de equipo de prueba un poco más tarde.
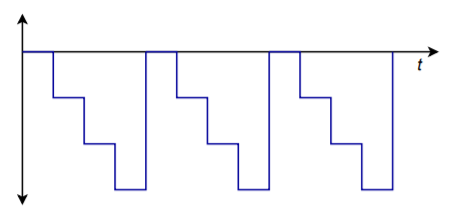
Figura\(\PageIndex{3}\): Salida ciclada.
Para aumentar la resolución, parece que todo lo que necesita hacer al amplificador sumador es agregar canales adicionales con resistencias cada vez más grandes. Desafortunadamente, los tamaños de resistencia pronto se vuelven poco prácticos y se requiere otro enfoque. Por ejemplo, un sistema de 16 bits requeriría que la resistencia LSB sea igual a 65,536\(R_f\). Un problema es que la pequeña corriente de entrada resultante puede ser empequeñecida por las corrientes de polarización y compensación de entrada. Además, se necesita una alta precisión de componentes para las entradas más significativas en términos de las resistencias de entrada y las señales de accionamiento. Las resistencias excesivamente grandes también pueden aportar ruido añadido. La solución estándar a este problema implica el uso de una red divisora\(R/2R\) resistiva.
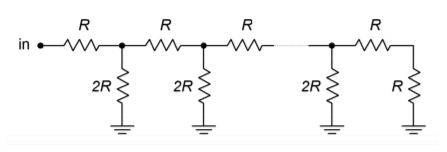
Figura\(\PageIndex{4}\): red\(R/2R\) de escalera
Una\(R/2R\) red se muestra en la Figura\(\PageIndex{4}\). Este circuito exhibe el atributo único de división constante por 2 para cada etapa. Puede pensar en esto como una división de voltaje en cada nodo sucesivo o una división de corriente en cada tramo sucesivo. Un ejemplo de una red de cuatro etapas (es decir, cuatro bits) se muestra en la Figura\(\PageIndex{5}\).
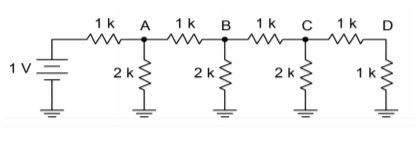
Figura\(\PageIndex{5}\): Una escalera de 4 etapas.
Para encontrar la tensión en cualquier nodo dado, se deben tomar en cuenta los efectos de carga de las siguientes etapas. Esto es mucho más fácil de hacer de lo que parece al principio. Si necesitamos encontrar el voltaje en el punto\(A\), primero debemos encontrar la resistencia en paralelo con la\(k\Omega\) resistencia 2 inicial. Una inspección rápida muestra que cada etapa está cargada por las siguientes etapas, por lo que es más fácil si comenzamos en la última etapa y trabajamos hacia la entrada. La resistencia efectiva a la derecha del nodo\(C\) es 1\(k\Omega\) en serie con 1\(k\Omega\), o 2\(k\Omega\). Esta resistencia se coloca en paralelo con la\(k\Omega\) resistencia 2 vista de nodo\(C\) a tierra. El resultado es 1\(k\Omega\). Es decir, de\(C\) a tierra, vemos 1\(k\Omega\). Esto crea un divisor de voltaje 2:1 con la\(k\Omega\) resistencia 1 colocada de\(B\) a\(C\), por lo que el voltaje en\(C\) debe ser la mitad del voltaje en\(B\). Esto también señala el hecho de que el nodo de entrada de corriente se\(C\) divide en dos partes iguales: una que viaja hacia el punto\(D\), y la otra que viaja a través de la\(k\Omega\) resistencia 2 a tierra. Esto se muestra gráficamente en la Figura\(\PageIndex{6}\).
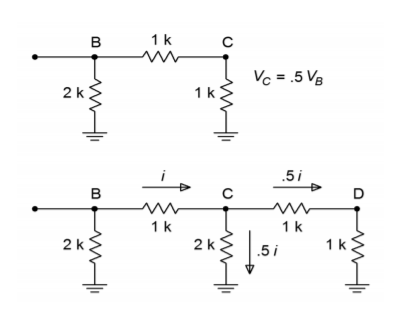
Figura\(\PageIndex{6}\): Análisis de escalera. a. Circuito equivalente (arriba). b. División de corriente (abajo).
Si observa la sección de circuito equivalente de la Figura\(\PageIndex{6}\), notará que esta porción ahora se ve exactamente como la porción final de la red original. Es decir, cada vez que se simplifica y analiza una sección, el resultado será una reducción a la mitad de voltaje y corriente. Ya es evidente que el voltaje a\(D\) debe ser la mitad del voltaje a\(C\), que a su vez, debe ser la mitad del voltaje a\(B\). Como ahora puedes probar, se deduce que el voltaje a\(B\) debe ser la mitad del voltaje a\(A\). De manera similar, la corriente que pasa por cada\(2R\) tramo es la mitad de la corriente anterior. (Para la división actual, la sección final no se utiliza para derivar una corriente ya que será igual al valor de la etapa anterior.) La reducción a la mitad de la corriente es justo lo que se necesita para la representación binaria de la palabra de entrada digital.
Adaptar la\(R/2R\) red al convertidor DA es relativamente fácil. La red se alimenta desde una fuente de corriente estable, con cada\(2R\) elemento alimentando a un amplificador sumador. En serie con cada\(2R\) elemento hay un conmutador de estado sólido, que establece el nivel lógico apropiado. Esto se muestra en la Figura\(\PageIndex{7}\), con la red efectivamente en su lado. Cuando se presenta un alto lógico a un bit dado, el interruptor se cierra y la corriente fluye a través del\(2R\) elemento y hacia el amplificador operacional. Tenga en cuenta que el extremo derecho de la resistencia está efectivamente en tierra, ya que el nodo sumador del amplificador operacional es una tierra virtual. Si se presenta un bajo lógico, el interruptor desvía la corriente a tierra, evitando el amplificador operacional. De esta manera, se suman las corrientes apropiadamente ponderadas y se utilizan para producir el voltaje de salida.
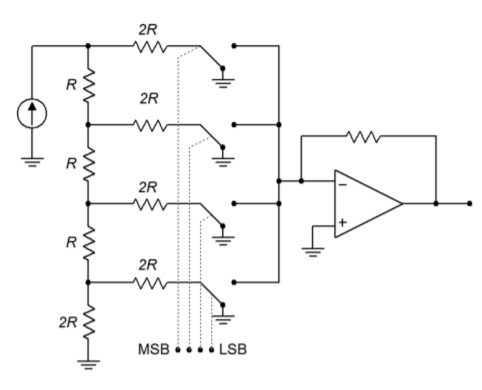
Figura\(\PageIndex{7}\): Convertidor con escalera R/2R.
Esta técnica ofrece varias ventajas sobre la versión de ganancia ponderada más simple. Primero, todas las sucursales son alimentadas por una fuente de corriente común. Debido a esto, no hay necesidad de igualar el nivel de salida. En segundo lugar, solo se requieren dos valores diferentes de resistencias para cualquier número de bits utilizados, en lugar del rango poco prácticamente amplio visto anteriormente. Es más económico controlar la tolerancia de solo dos partes diferentes que 12 o 16. Tenga en cuenta que aún se generan pequeñas corrientes de entrada para los bits menos significativos, por lo que la atención a las corrientes de polarización y compensación de entrada sigue siendo importante.
12.4.1: Prácticos límites de convertidor digital a analógico
Quizás el límite más obvio asociado con el convertidor DA es su velocidad. El amplificador operacional utilizado en el DAC debe ser mucho más rápido que las señales finales que está destinado a producir. Una forma de onda de salida dada puede contener varias docenas de puntos de muestra individuales por ciclo. El amplificador operacional debe responder a cada punto de muestreo. En consecuencia, se requiere ancho de banda amplio y altas tasas de rotación.
Las hojas de especificaciones DAC integradas ofrecen algunos parámetros importantes de los cuales debe tener en cuenta. En primer lugar, existe la velocidad de conversión. Esta cifra indica cuánto tiempo tarda el DAC en convertir la palabra de entrada digital en una tensión de salida analógica estable. Esto establece la velocidad máxima de datos. A continuación viene la precisión y resolución. La resolución indica el número de pasos discretos que se pueden producir en la salida, y se establece por el número de bits disponibles. Esto no es lo mismo que precisión. La precisión en realidad se compone de varios factores diferentes, incluido el error de compensación, el error y la no linealidad. El error de desplazamiento normalmente se mide aplicando la palabra de entrada de todo cero y luego midiendo la señal de salida. Idealmente, esta señal será de cero voltios. La desviación de cero se toma como el error de desplazamiento. Esto tiene el efecto de hacer que todos los niveles de salida sean inexactos por un voltaje constante. El error de compensación es relativamente fácil de compensar en muchas aplicaciones aplicando un desplazamiento igual de polaridad opuesta. El error de ganancia es una desviación que afecta a cada nivel de salida en un porcentaje constante. Es como si la señal pasara a través de un pequeño amplificador o atenuador. Este error puede ser compensado usando un amplificador con una ganancia igual al recíproco del error. Las dos ganancias cancelarán efectivamente. El efecto de desplazamiento y error de ganancia se muestran en las Figuras\(\PageIndex{8}\) y\(\PageIndex{9}\).
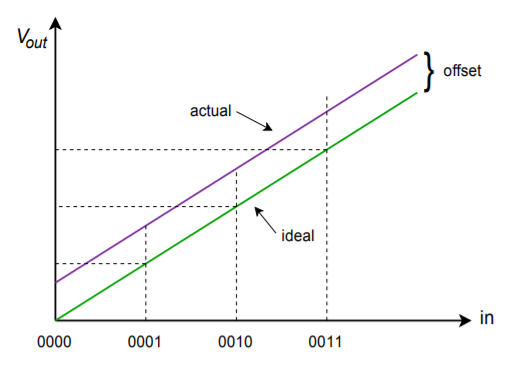
Figura\(\PageIndex{8}\): Solo error de compensación.
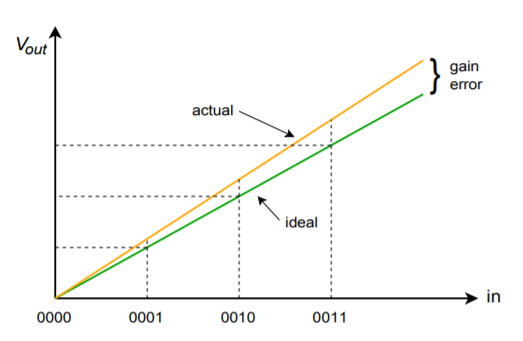
Figura\(\PageIndex{9}\): Solo error de ganancia.
Los errores de no linealidad pueden dividirse en dos formas: no linealidad integral y no linealidad diferencial. La no linealidad integral detalla el desplazamiento máximo entre las salidas ideales y las salidas reales para todas las entradas posibles. La no linealidad diferencial detalla la desviación máxima de salida relativa a un LSB causada por dos palabras de entrada adyacentes. Si la no linealidad diferencial está más allá de\(\pm 1\) LSB, el sistema puede ser no monótono. En otras palabras, una palabra de entrada digital más alta puede producir realmente un voltaje de salida analógica más bajo. Estas dos formas de error se muestran en la Figura\(\PageIndex{10}\). Obsérvese que es posible tener una alta no linealidad integral y aún así tener una modesta no linealidad diferencial. Este es el caso en la Figura\(\PageIndex{10b}\).
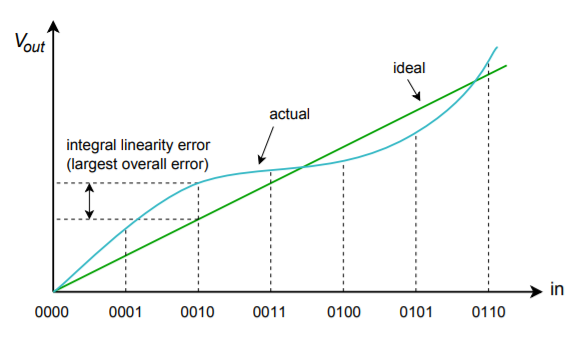
Figura\(\PageIndex{10a}\): Error de linealidad Error de linealidad integral.
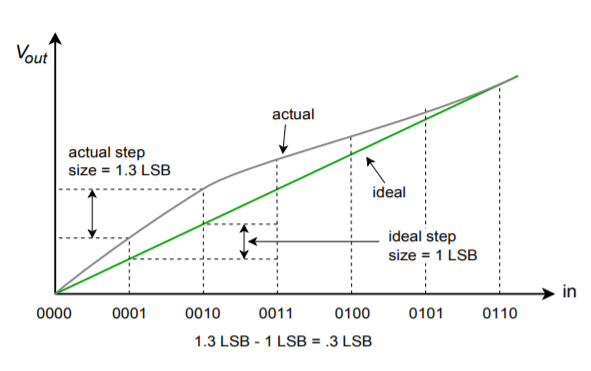
Figura\(\PageIndex{10b}\): Error de linealidad (continuación) Error de linealidad diferencial (error relativo-adyacente).
Como puede ver, la precisión depende de factores bastante complejos. En un esfuerzo por reducir esto a un solo número, algunos fabricantes dan un número efectivo de especificación de bits. Por ejemplo, se puede especificar que un DAC de 16 bits tiene una precisión de 14 bits. Esto significa que los 14 bits más significativos se comportan de la manera idealizada, pero los 2 bits más bajos pueden ser inundados por errores de linealidad. Otra especificación que a veces verás es que no faltan códigos. Esto significa que por cada incremento en la palabra de entrada, habrá un cambio de nivel de salida positivo apropiado.
En la práctica, el convertidor DA estándar se utiliza con un filtro de salida. Como puede ver en las figuras anteriores, las formas de onda producidas por el DAC contienen un efecto secundario de escalón de escalera. Generalmente, esto no es deseable. Los cambios abruptos en el nivel de salida indican que están presentes componentes de mayor frecuencia. Todos los componentes por encima de la tasa de Nyquist deben filtrarse con un filtro de paso bajo apropiado. Este filtro a veces se conoce como un filtro de reconstrucción o suavizado. En un sistema diseñado incorrectamente, el filtro de reconstrucción eliminará algunos de los componentes de frecuencia dentro de banda más altos (es decir, componentes inmediatamente por debajo de la frecuencia Nyquist). Para compensar esto, los niveles lógicos a menudo se enganchan al DAC por períodos acortados, creando así una apariencia más puntiforme, en lugar de la forma de escalón. Este efecto se muestra en la Figura\(\PageIndex{11}\). Aunque esta forma de onda con picos parece ser menos deseable que la forma de escalón, crea niveles más altos para los componentes superiores, y después del filtrado, el resultado es una respuesta de frecuencia general más suave.
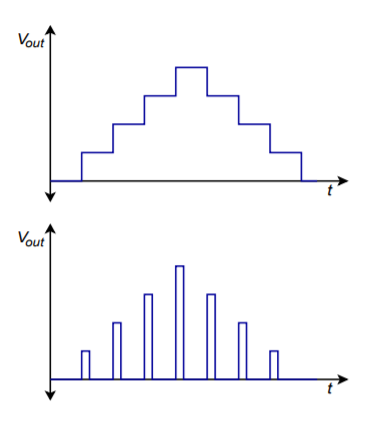
Figura\(\PageIndex{11}\): Reconstrucción de salida. a. Cierre de periodo completo (arriba). b. Cierre de periodo parcial (abajo).
Para aumentar aún más la calidad de la forma de onda de salida, a veces se emplea una técnica conocida como sobremuestreo. La idea básica es crear nuevos puntos de muestreo entre los existentes. El resultado es una tasa de datos mucho más densa, que ojalá, arroje resultados más exigentes después del filtrado. Además, la mayor velocidad de datos puede aflojar los requisitos del filtro de reconstrucción. Un sistema típico podría usar cuatro veces sobremuestreo, lo que significa que la velocidad de datos de salida es cuatro veces la original. Por lo tanto, para cada palabra de entrada, se tienen que agregar tres palabras nuevas. Este efecto se muestra en la Figura\(\PageIndex{12}\).
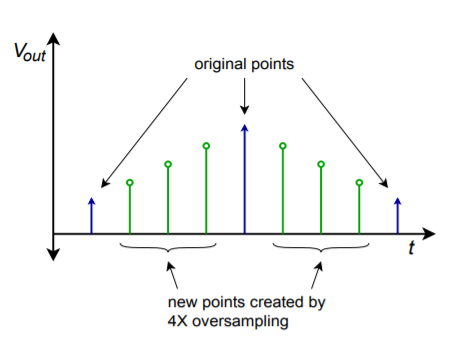
Figura\(\PageIndex{12}\): Salida sobremuestreada.
Hay varias formas de crear los nuevos puntos de muestreo. La forma más obvia es a través de la simple interpolación, pero esto no logra los mejores resultados. Otra técnica consiste en inicializar los nuevos valores a cero y luego pasar el flujo de datos a través de un filtro digital de paso bajo, que efectivamente calcula los valores adecuados. Una extensión del principio de sobremuestreo es la técnica delta-sigma. En delta-sigma, se utilizan tasas muy altas de sobremuestreo junto con algoritmos de filtro digitales especializados. Los algoritmos esencialmente negocian la velocidad de datos más alta por una velocidad más lenta con mayor resolución. El diseño y análisis de los sistemas delta-sigma es bastante avanzado y está fuera del alcance de este texto. Baste decir que estas técnicas pueden aumentar la calidad de la señal de salida y son ampliamente utilizadas en aplicaciones como reproductores de CD y DVD de audio de alta calidad.
12.4.2: Circuitos integrados de convertidor digital a analógico
Hay muchas aplicaciones posibles para los convertidores de digital a analógico, y varios chips diferentes han evolucionado para satisfacer necesidades específicas. Generalmente, puedes agruparlos en clases específicas, como alta velocidad, alta resolución o bajo costo. Examinaremos tres tipos representativos. Los dispositivos que veremos son el DAC0832; una unidad básica de 8 bits, el DAC7545; una unidad de 12 bits compatible con microprocesador, y el PCM1716; un convertidor de alta calidad de 24 bits utilizado en la industria del audio.
DAC0832
Este IC es un popular convertidor de 8 bits compatible con microprocesador. El DAC0830 y el DAC0831 son similares, pero con un rendimiento algo reducido. Se trata de un DAC multiplicador. En otras palabras, la señal de salida es una función de la palabra de entrada digital y una entrada de referencia. En algunas aplicaciones, la entrada de referencia no es fija, sino que es una señal de entrada variable. En la Figura se muestra una lista de características y un pin-out\(\PageIndex{13}\). Los artículos notables son un tiempo de asentamiento de solo 1\(\mu\) s, bajos requisitos de energía y alta linealidad. El DAC0832 puede ser utilizado ya sea en modo autónomo o con un microprocesador. Las formas de onda de conmutación se muestran en la Figura\(\PageIndex{14}\).
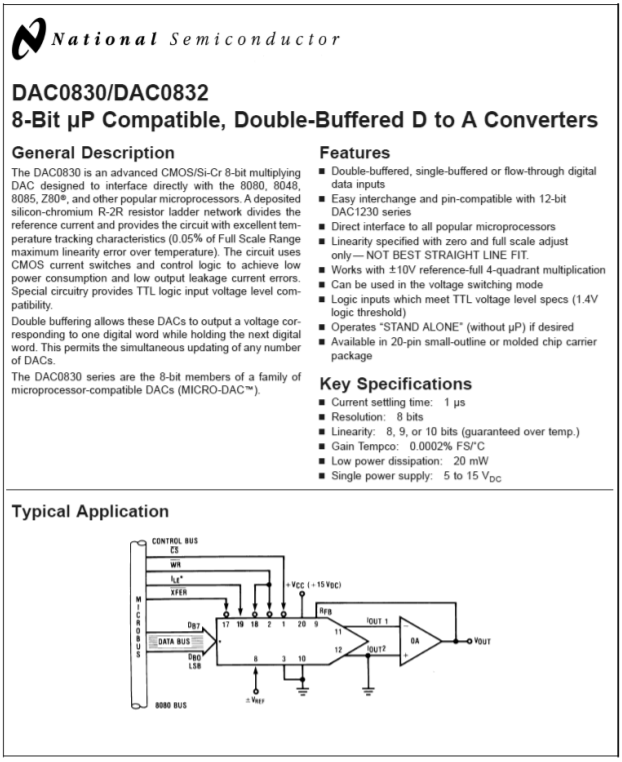
Figura\(\PageIndex{13}\): DAC0832. Reimpreso cortesía de Texas Instrutment
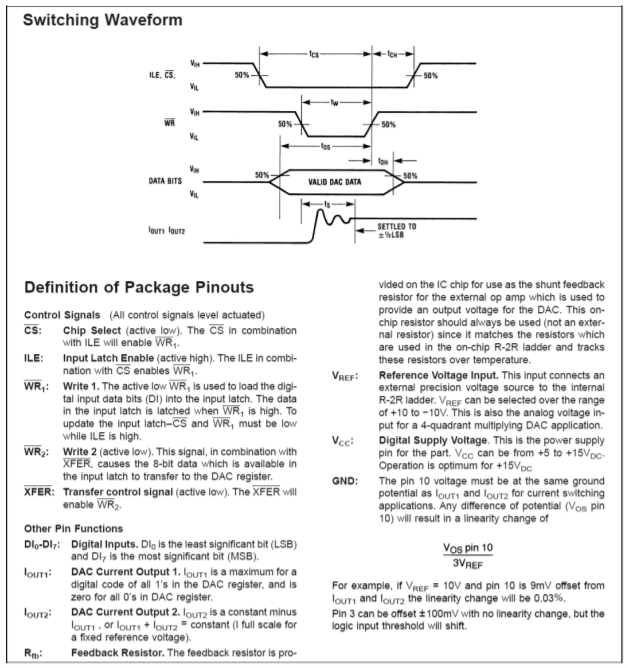
Figura\(\PageIndex{14}\): DAC0832 conmutación de formas de onda Reimpresas cortesía de Texas Instrutments
Una interesante aplicación del DAC0832 se puede encontrar en la Figura\(\PageIndex{15}\). Básicamente, se trata de un filtro de variables de estado controlado digitalmente.
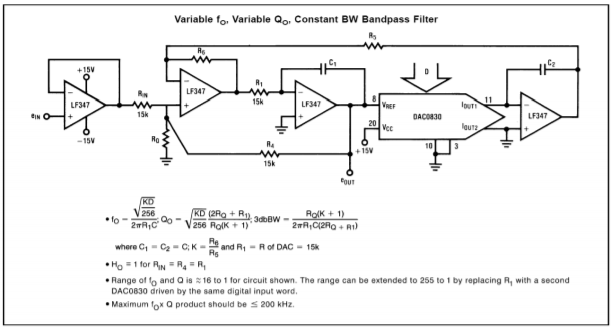
Figura\(\PageIndex{15}\): Aplicación de filtro de variable de estado DAC0832. Reimpreso cortesía de Texas Instrutments
Tenga en cuenta que el convertidor reemplaza la resistencia de entrada del segundo integrador. Normalmente, esa resistencia se utilizaría para convertir la tensión de salida del primer integrador en una corriente de entrada para el segundo integrador. Este trabajo ahora es manejado por el DAC0832. La palabra de entrada digital establece efectivamente la conversión de voltaje a corriente. Así, un cambio en la palabra de entrada altera la frecuencia de sintonización del filtro apenas como un potenciómetro. Compare este circuito con el filtro controlado por voltaje basado en OTA del Capítulo Once. Conceptualmente, son muy similares.
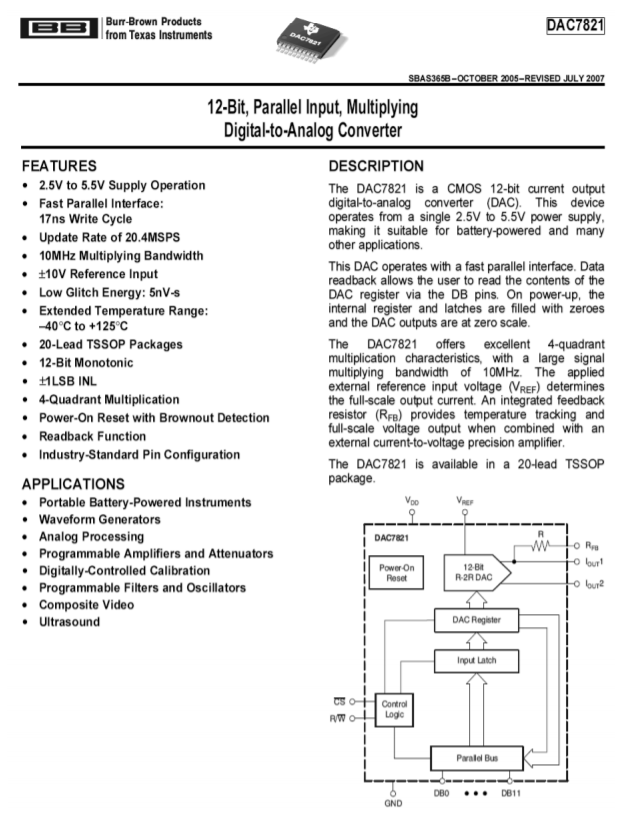
Figura\(\PageIndex{16}\): DAC7821. Cortesía reimpresa de Texas Instruments
DAC7821
El DAC7821 es un convertidor lineal de 12 bits bastante estándar y se muestra en la Figura\(\PageIndex{16}\). Sus aspectos interesantes son que es un convertidor multiplicador y que es compatible con microprocesadores. El efecto multiplicador proviene del hecho de que se utiliza una referencia para impulsar la red de\(R/2R\) escalera. Si se cambia la referencia, la salida se vuelve a escalar efectivamente. En consecuencia, se puede pensar en la señal de salida como igual al valor de referencia multiplicado por la palabra de entrada digital. También puede pensar en esto como una forma de “control de volumen digital”.
Con la inclusión de algunas líneas lógicas adicionales, el IC se ha vuelto compatible con el microprocesador. Esto significa que el DAC7821 tiene líneas de selección y lectura/escritura de chip junto con las 12 líneas de entrada de datos. Esto permite que el convertidor se conecte directamente al bus de datos del microprocesador. Mediante el uso de E/S mapeadas en memoria, el microprocesador puede escribir datos en el convertidor tal como escribe datos en la memoria. Un sistema de microprocesador de 16 bits puede presentar al convertidor todos los datos que necesita durante un ciclo de escritura, sin embargo un microprocesador de 8 bits necesitará dos ciclos de escritura y algún tipo de pestillo. Se puede usar una dirección para los 8 bits inferiores y otra dirección para los 4 bits restantes. Un sistema simplificado se muestra en la Figura\(\PageIndex{17}\) usando un microprocesador de 8 bits.
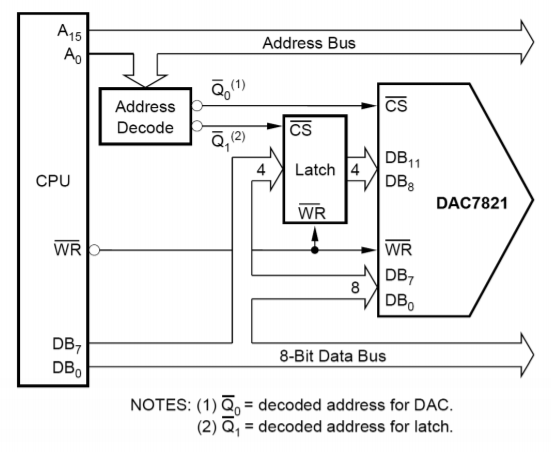
Figura\(\PageIndex{17}\): Microprocesador a interfaz DAC7821. Cortesía reimpresa de Texas Instruments
PCM5242
El PCM5242 es un convertidor estéreo de 24 bits diseñado específicamente para aplicaciones de audio digital de alta calidad. Viene en un paquete VQFN (Muy delgado Quad Flat sin plomo). Un diagrama de bloques y una lista de características se muestran en la Figura\(\PageIndex{18a}\). A diferencia de los otros convertidores, el PCM5242 cuenta con entrada serial de datos, no paralela. Incluye su propio circuito y lógica de conversión en serie a bordo. Esta técnica ayuda a reducir el costo del sistema. También es sorprendentemente conveniente ya que muchos CI especializados de procesamiento de señal digital que podrían usarse con el PCM5242 utilizan una salida de tipo serie. Esto se puede alimentar directamente al PCM5242 en formato de 16, 24 o 32 bits.
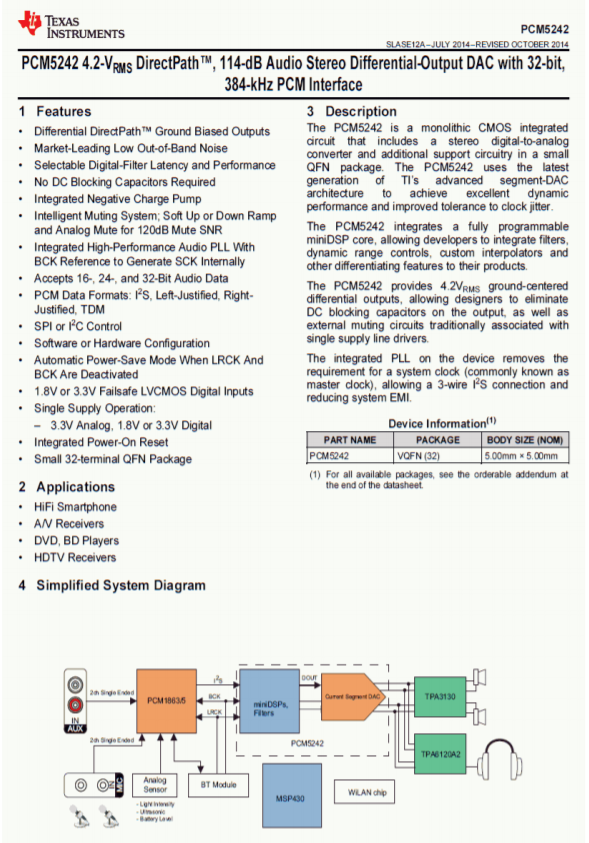
Figura\(\PageIndex{18a}\): PCM5242. Cortesía reimpresa de Texas Instruments
La hoja de especificaciones PCM5242 se muestra en la Figura\(\PageIndex{18b}\). Tenga en cuenta que este dispositivo se especifica con frecuencias de muestreo de 48 kHz a 192 kHz. La distorsión armónica total más ruido suele estar 94 dB por debajo de una salida a escala completa cuando se usa con cualquiera de estas frecuencias de muestreo. Debido a su alta resolución y rango dinámico de 114 dB, se debe tener especial cuidado durante el diseño del circuito para evitar la captación de zumbidos y la interferencia de RF.
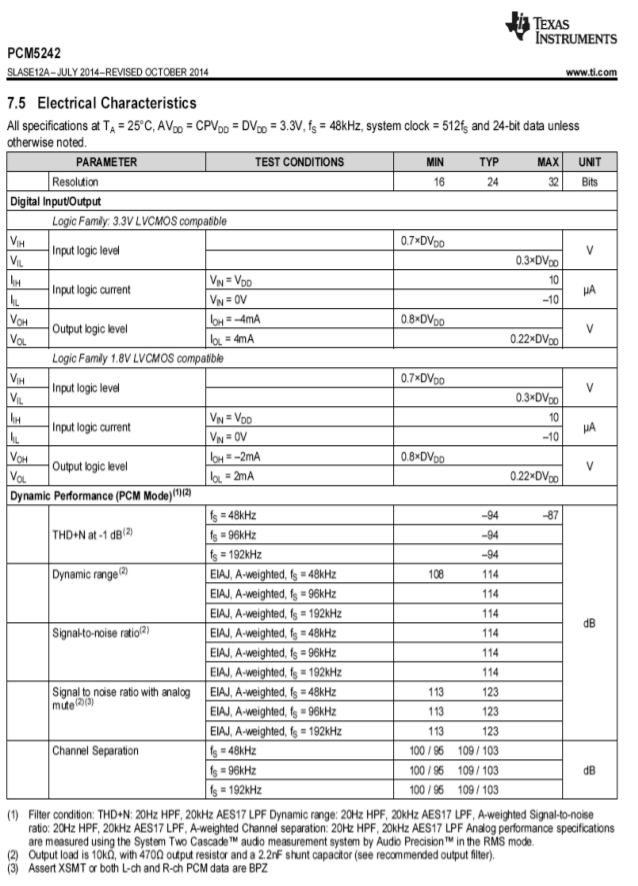
Figura\(\PageIndex{18b}\): Especificaciones PCM5242. Cortesía reimpresa de Texas Instruments
12.4.3: Aplicaciones de circuitos integrados de convertidor digital a analógico
Ejemplo\(\PageIndex{1}\)
Quizás lo primero en lo que mucha gente piensa cuando escucha los términos digital o digitalizado, es el disco compacto de audio, o CD para abreviar. Los reproductores de CD domésticos son excelentes ejemplos del uso de circuitos DA de precisión en nuestra vida cotidiana. Los datos de música se almacenan en el CD con resolución de 16 bits y una frecuencia de muestreo de 44.1 kHz. Esto produce una frecuencia Nyquist de 22.05 kHz, que es lo suficientemente alta como para abarcar el rango auditivo de la mayoría de los humanos. La corrección de errores y los datos auxiliares también se almacenan en el disco. Los datos se almacenan en disco en forma de pozos muy diminutos, los cuales son leídos por un láser. Luego, la señal se convierte en la forma lógica electrónica común donde se verifica el error y se ajusta según sea necesario. El flujo de datos se alimenta entonces al convertidor DA para la reconstrucción de audio. Un único convertidor puede multiplexarse entre los dos canales estéreo, o se pueden usar dos convertidores dedicados. El sobremuestreo en el rango de 2X a 8X se usa a menudo para mejorar la calidad de la señal. En la Figura se muestra un diagrama de bloques del sistema\(\PageIndex{19}\). La porción real de DAC parece casi trivial en comparación con algunos de los elementos más sofisticados.
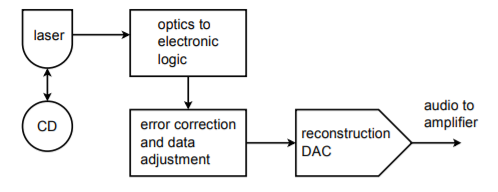
Figura\(\PageIndex{19}\): Sistema de reproducción de disco compacto de audio.
La densidad de almacenamiento del CD óptico es bastante notable. Este pequeño disco (de menos de 5 pulgadas de diámetro) puede contener 70 minutos de música. Ignorando los datos auxiliares, podemos calcular rápidamente el almacenamiento total. Tenemos dos canales de datos de 16 bits, o 32 bits (4 bytes) por punto de muestreo. Hay 44,100 muestras por segundo durante 70 minutos, produciendo 185.22 megasamples. El almacenamiento total de datos es de 5.927 gigabits, o 741 megabytes.
Ejemplo\(\PageIndex{2}\)
Como ya hemos mencionado, es posible conectar DAC directamente a sistemas de microprocesadores. Además, el microprocesador puede escribir en el DAC sin más esfuerzo que escribir en una ubicación de memoria. El microprocesador puede escribir cualquier serie de palabras de datos que deseemos al DAC y puede repetir una secuencia prácticamente para siempre. Dada esta capacidad, podemos hacer un generador de formas de onda arbitrarias. En lugar de estar bloqueado en un conjunto de formas de onda predefinidas como en generadores de función ordinarios, este sistema permite todo tipo de formas de onda. La precisión y flexibilidad del sistema dependerá de su velocidad y de la resolución DAC disponible.
La idea básica es una de búsqueda de mesa. Por ejemplo, digamos que tenemos un sistema de 16 bits. Crearemos una tabla de valores de datos para un ciclo de la forma de onda de salida. Por conveniencia, podríamos hacer que el tamaño de la mesa sea una potencia práctica de 2, como 256. En otras palabras, un solo ciclo de salida se dividirá en 256 fragmentos de tiempo discretos. Es obvio, entonces, que el convertidor debe ser unos cientos de veces más rápido que el fundamental más alto que deseamos producir. Al aumentar o disminuir la velocidad de datos de salida, podemos cambiar la frecuencia de la fundamental de salida. Esto se conoce como técnica de frecuencia de muestreo variable. También es posible cambiar la frecuencia fundamental con una técnica de tasa fija (esto es algo más complejo, pero sí ofrece ciertas ventajas). Un diagrama de flujo de salida se muestra en la Figura\(\PageIndex{20}\).
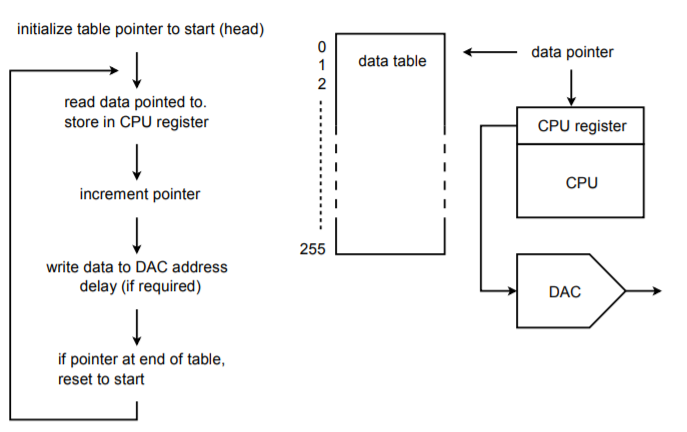
Figura\(\PageIndex{20}\): Generador de formas de onda arbitrarias.
Tras la inicialización, se establece un puntero de dirección en la dirección de inicio de la tabla de datos. La CPU lee los datos de la tabla a través del puntero. El puntero se incrementa para que ahora apunte al siguiente elemento de la tabla. (Algunas CPU ofrecen un modo de direccionamiento posterior al incremento para que ambos pasos se puedan realizar en una sola instrucción). A continuación, la CPU escribe los datos en la dirección DAC especial. En este punto, se invoca alguna forma de retardo de software/hardware que establece la velocidad de datos de salida. Después del retraso, la CPU lee el siguiente elemento de datos a través del puntero y continúa como en la primera ejecución. Una vez que se envía el elemento 256, el puntero se restablece al inicio de la tabla y el proceso continúa. De esta manera, la mesa puede ser pensada como circular, o interminable. Si el software del sistema está escrito en un lenguaje de nivel superior, la tabla de punteros/datos puede implementarse como una matriz simple donde el índice de matriz se establece mediante un contador. Sin embargo, esto no será tan eficiente como un enfoque de nivel de ensamblaje directo.
La verdadera belleza de este sistema es que la tabla de datos puede contener prácticamente cualquier secuencia de datos. Los datos podrían representar un seno, pulso, triángulo u otra función estándar. Más importante aún, los datos podrían representar una onda sinusoidal con un transitorio de ruido incorporado, o una señal que contiene un componente de zumbido con la misma facilidad. Estos datos podrían provenir de tres fuentes básicas. En primer lugar, la tabla de datos se puede rellenar mediante cálculo directo si se conoce la ecuación en el dominio del tiempo de la función deseada. En segundo lugar, los datos podrían ser fabricados por el usuario a través de alguna forma de interacción con una computadora, tal vez con un mouse o un bloc de dibujo. Finalmente, los datos pueden derivarse de una señal del mundo real. Es decir, se puede usar un convertidor analógico-digital para grabar la señal en forma digital. Los datos pueden entonces cargarse en la tabla y reproducirse repetidamente. El generador de formas de onda arbitrarias permite a su usuario probar circuitos y sistemas con un rango de formas de onda que serían imposibles o poco prácticas de generar de otra manera.
Ejemplo\(\PageIndex{3}\)
Bajo control informático, los convertidores DA se pueden utilizar como parte de un sistema de equipo de prueba automatizado. Para caracterizar completamente un producto electrónico, es necesario realizar una serie de pruebas individuales. La configuración de cada prueba individual puede llevar algo de tiempo y está sujeta a errores del operador. Automatizar este procedimiento puede mejorar la repetibilidad y disminuir el tiempo de prueba. Hay muchas formas en las que este proceso puede ser automatizado. Veremos un enfoque.
Figura\(\PageIndex{21}\): Configuración de prueba simple.
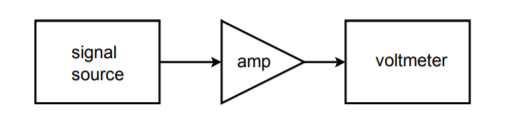
Supongamos que nos gustaría hacer mediciones de respuesta de frecuencia para un amplificador a 20 frecuencias diferentes. Un sistema de prueba de circuito apropiado para este trabajo se muestra en la Figura\(\PageIndex{21}\). Para realizar esta prueba manualmente se requieren 20 ajustes distintos de la señal fuente, y 20 lecturas de salida correspondientes. Esto puede resultar bastante tedioso si se van a probar muchas unidades. Sería muy útil si hubiera alguna manera en que la frecuencia de origen pudiera cambiarse automáticamente a valores preestablecidos. Esto no es particularmente difícil. La mayoría de las fuentes modernas tienen entradas de voltaje de control que pueden usarse para establecer la frecuencia. El voltaje de control requerido se puede crear y ajustar con precisión mediante el uso de una computadora y un convertidor DA. La computadora puede programarse para enviar palabras digitales específicas al DAC, que a su vez alimenta la entrada de control de fuente de señal. En otras palabras, la palabra de datos establece directamente la frecuencia de la fuente de señal. La computadora puede programarse para enviar prácticamente cualquier secuencia de palabras de datos a casi cualquier tasa y hacerlo todo sin la intervención del operador. Todo lo que el operador necesita hacer es iniciar el proceso. La repetibilidad de las pruebas es muy alta con un sistema como este. Un diagrama de bloques de este sistema se muestra en la Figura\(\PageIndex{22}\).
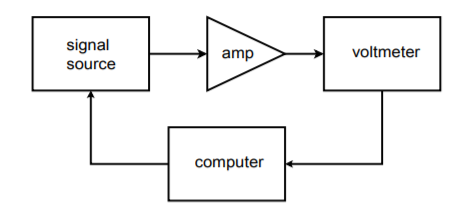
Figura\(\PageIndex{22}\): Configuración de prueba automatizada.
Para registrar los datos, el voltímetro puede estar conectado a una grabadora de gráficos de tiras, o mejor aún, de vuelta a la computadora. Los datos pueden ser enviados a la computadora en forma digital si el voltímetro es de diseño bastante avanzado, o, con la inclusión de un convertidor analógico-digital, la señal de salida puede ser muestreada y manipulada directamente por la computadora. En cualquier caso, se pueden crear archivos de datos para cada unidad probada y almacenados para su uso posterior. Además, el análisis estadístico conveniente se puede realizar rápidamente al final de un lote de prueba. Tenga en cuenta que debido a que el convertidor DA solo genera una señal de control, normalmente no se requiere muy alta resolución y baja distorsión. Si se utiliza un convertidor de alta resolución, es posible crear las señales de prueba en la computadora (como en el generador de funciones arbitrarias), y prescindir de la fuente de señal.
El sistema de prueba automatizado es solo una posible aplicación del control de instrumentos. Otro ejemplo interesante está en la generación de “espectáculos de luz” láser. Un diagrama de bloques de un sistema simplificado se muestra en la Figura\(\PageIndex{23}\). Para crear los patrones complejos que ve el público, un rayo láser rebota en diminutos espejos móviles. Los espejos pueden montarse en algo tan sencillo como un galvanómetro. El galvanómetro es alimentado por un DAC. El patrón que hace el rayo láser depende de cómo el galvanómetro mueve el espejo, que a su vez es controlado por las palabras de datos alimentadas al DAC. En la práctica, se pueden utilizar varios espejos para desviar la viga a lo largo de tres ejes.
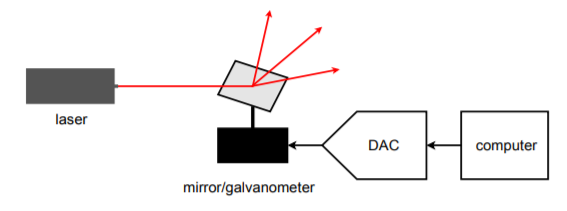
Figura\(\PageIndex{23}\): Iluminación controlada por computadora.
Los convertidores DA se pueden utilizar para ajustar cualquier dispositivo con una entrada de tipo control-voltaje. Además, pueden ser utilizados para controlar dispositivos electromecánicos que responden a una tensión aplicada. Su verdadera ventaja es la repetibilidad y flexibilidad que ofrecen.