
5.3: Oscilador de Reflexión
- Page ID
- 86079
El diseño de osciladores de microondas estables utiliza tradicionalmente el criterio de estabilidad del oscilador de un puerto esbozado por Kurokawa [11, 12]. La mayoría de los osciladores de dos puertos se pueden diseñar fundiéndolos en forma de oscilador de un puerto. Al aplicar la condición, cada una de las redes (el dispositivo activo, la carga del resonador y la terminación del dispositivo) se caracterizan como un puerto.
5.3.1 Condición de oscilación de Kurokawa
La condición de oscilación para un oscilador de reflexión estable se puede expresar en términos de las admitancias de la red resonadora\(Y_{r} = G_{r} + \jmath B_{r}\), y de la red activa\(Y_{d} = G_{d} + \jmath B_{d}\), véase la Figura\(\PageIndex{1}\) (a). La condición del oscilador Kurokawa establece que para oscilación estable (de frecuencia única) [11]
\[\label{eq:1}\left.\left(\frac{\partial G_{d}}{\partial V}\frac{\partial B_{r}}{\partial\omega}-\frac{\partial B_{d}}{\partial V}\frac{\partial G_{r}}{\partial\omega}\right)\right|_{V=V_{0},\omega = \omega_{0}}>0 \]
donde el subíndice\(0\) se refiere al punto de operación,\(r\) se refiere al resonador y\(d\) se refiere al dispositivo activo. Las características del dispositivo activo y del resonador mostradas en las Figuras\(\PageIndex{1}\) (b y c) satisfacen la condición de Kurokawa. En Ecuación\(\eqref{eq:1}\)\(V_{0}\) se encuentra la amplitud de la oscilación en la interfaz de las redes activas y resonadoras. Si no\(\eqref{eq:1}\) se cumple la condición en Ecuación, entonces el oscilador puede oscilar simultáneamente a múltiples frecuencias. La condición de oscilación de Kurokawa debe cumplirse en todo momento, lo que incluye durante el arranque, incluso cuando se aplica polarización, del oscilador.
Con un oscilador de frecuencia fija la red de resonadores es lineal, por lo que\(G_{r}\)\(B_{r}\) son independientes de la amplitud y\(G_{r}\) (por diseño) es independiente de la frecuencia. \(B_{r}\)varía con la frecuencia. Idealmente, el dispositivo activo tiene una frecuencia independiente\(G_{d}\) e independiente de la amplitud\(B_{d}\). Lograr esto es una tarea de diseño importante. Con estas condiciones\(\partial B_{d}/\partial V\approx 0\) y\(\partial G_{r}/\partial \omega_{0}\approx 0\) y la
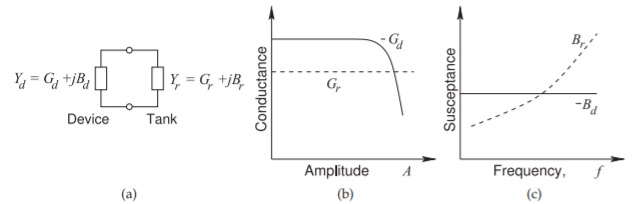
Figura\(\PageIndex{1}\): Operación del oscilador de reflexión: (a) oscilador de un puerto; (b) a medida que aumenta la amplitud de la oscilación, la magnitud de la conductancia del dispositivo\(|G_{d}|\), disminuye mientras que la conductancia del circuito del tanque\(G_{r}\),, es constante; y (c) como la frecuencia de la oscilación aumenta, la susceptancia del circuito del tanque\(B_{r}\),, cambia mientras,\(B_{d}\) (idealmente) no cambia.
La condición de Kurokawa en la ecuación\(\eqref{eq:1}\) simplifica a
\[\label{eq:2}\left.\left(\frac{\partial G_{d}}{\partial V}\frac{\partial B_{r}}{\partial\omega_{0}}\right)\right|_{V=V_{0},\omega =\omega_{0}}>0 \]
Por lo tanto, el diseño se simplifica enormemente para un oscilador de frecuencia fija con un\(Q\) resonador alto.
5.3.2 Enfoque de diseño del oscilador de reflexión
Cuando un dispositivo con admitancia\(Y_{d} = G_{d} + \jmath B_{d}\) se conecta en derivación a un resonador de admitancia\(Y_{r} = G_{r} +\jmath B_{r}\) (ver Figura\(\PageIndex{1}\) (a)), la amplitud de voltaje\(A\) y la frecuencia\(\omega\) de radianes de la oscilación de equilibrio resultante se determinan cuando\(−G_{d}(A) = G_{r}(\omega)\) y\(−B_{d}(A) = B_{r}(\omega )\). Aquí la suposición es que la conductancia del dispositivo solo es una función fuerte de la amplitud de voltaje, mientras que la admitancia del resonador es una función solo de la frecuencia angular. Esta condición se puede representar gráficamente denotando primero el locus del negativo de la admitancia compleja del dispositivo como\(−Y_{d}(A) = −[G_{d}(A)+\jmath B_{d}(A)]\) (también denominado coeficiente de reflexión inversa del dispositivo, o\(1/\Gamma\) locus (a veces denominado\(1/S\) locus)) y el locus del resonador admisión como\(Y_{r}(\omega ) = G_{r}(\omega )+\jmath B_{r}(\omega )\). Entonces, para una oscilación estable de frecuencia única, la intersección de estos loci ocurre en un solo punto (es decir, en una sola combinación de amplitud y frecuencia).
En la mayoría de los diseños de osciladores, el objetivo es hacer que la admitancia del dispositivo sea independiente de la frecuencia y, por supuesto, la admitancia del circuito de tanque lineal es independiente de la amplitud de la señal oscilante. Estas condiciones de oscilación se representan en la Figura\(\PageIndex{1}\) (b y c). En la Figura\(\PageIndex{1}\) (b), a medida que aumenta la amplitud de la oscilación, la magnitud de la conductancia del dispositivo\(|G_{d}|\), disminuye mientras que la conductancia del circuito tanque,\(G_{r}\), es constante. En la Figura\(\PageIndex{1}\) (c), a medida que aumenta la frecuencia de la oscilación, la susceptancia del circuito del tanque,\(B_{r}\), cambia mientras que\(B_{d}\) (idealmente) es lento para cambiar. Las intersecciones definen la amplitud y frecuencia de la oscilación.
Si la admitancia del dispositivo depende de la frecuencia, entonces es difícil evitar múltiples intersecciones de los\(Y_{r} (\Gamma_{r})\) loci\(−Y_{d} (1/\Gamma_{d})\) y como se ve en el plano complejo. El ángulo de intersección de los\(−Y_{d}\) loci\(Y_{r}\) y es un indicador importante de estabilidad relacionado con múltiples oscilaciones, problemas de arranque del oscilador y exceso de ruido [13]. Por lo tanto, la intersección angular apropiada de estos loci es crítica. Es difícil lograr todos los objetivos en diseño a menos que\(Y_{d}\) sea independiente de la frecuencia.
Idealmente, el diseño del resonador requiere que\(Q\) se maximice para que\(G_{r}\approx 0\). Esto se puede lograr con un oscilador de microondas de frecuencia fija ya que el resonador se puede implementar con un condensador y un segmento de línea de transmisión, los cuales tienen pérdidas muy bajas. Sin embargo, los capacitores sintonizables en un diseño de VCO tienen pérdidas y por lo tanto no son altos.\(Q\) Los dos tipos de osciladores necesitan un enfoque de diseño diferente. Además, para un VCO, la sintonización de voltaje del resonador debe satisfacer los criterios de estabilidad, incluyendo un solo punto de intersección y un ángulo de intersección apropiado, sobre el rango de sintonización. Con énfasis en estas características y dado que hay parásitos capacitivos del dispositivo, lograr una interfaz resonador-dispositivo estable adecuada puede ser problemático. Un enfoque alternativo e igualmente viable para el análisis de estabilidad de una amplia clase de osciladores, particularmente para aquellos que utilizan dispositivos de tres terminales, es la aplicación de los criterios de dos puertos desarrollados para la evaluación de la estabilidad del amplificador. Sin embargo, los diseñadores de microondas prefieren el enfoque de diseño de un puerto porque la conexión de un puerto está más cerca de la operación prevista. La evaluación de un puerto de la estabilidad del oscilador no es diferente a los criterios Bode aplicados a los sistemas de retroalimentación de dos puertos [14, 15]. Sin embargo, a diferencia de la evaluación de estabilidad en bucle abierto de dos puertos, la técnica de caracterización de un puerto se alinea convenientemente con las mediciones que se pueden realizar mediante un VNA [16, 17]. Además, el efecto limitante no lineal del dispositivo activo se mide fácilmente.
5.3.3 Resumen
El diseño del oscilador de microondas utiliza invariablemente el enfoque del oscilador de reflexión en el que una red de dispositivos activos de un puerto está conectada a una red de resonadores de un puerto. El diseño es lo suficientemente complicado y es necesario simplificar el diseño y limitar el espacio de diseño. El procedimiento casi universalmente seguido es diseñar para las características mostradas en la Figura\(\PageIndex{1}\). El diseño de un oscilador de frecuencia fija se simplifica aún más porque la conductancia del resonador es casi nula.