
9: El papel del rendimiento en el diseño de aeronaves - Análisis de restricciones


- Última actualización
- 30 oct 2022
- Guardar como PDF

( \newcommand{\kernel}{\mathrm{null}\,}\)
Capítulo 9. El papel del rendimiento en el diseño de aeronaves: análisis de restricciones
Introducción
En los capítulos siguientes hemos analizado muchos aspectos del rendimiento básico de los aviones. Estos incluyeron despegue y aterrizaje, giros, vuelo recto y nivelado en crucero, y ascenso. Si tuviéramos que ver las relaciones que encontramos para cualquiera de estos, podríamos ver cómo podríamos diseñar un avión para lograr mejor la tarea en cuestión. Es decir, si quisiéramos diseñar una aeronave que pudiera despegar y aterrizar en una distancia muy corta podemos observar las ecuaciones de distancia de despegue y aterrizaje e identificar los factores que minimizarían estas distancias. Para despegar en una distancia corta podríamos querer un alto coeficiente de sustentación máximo para obtener una velocidad de despegue baja, una gran área del ala para dar mucha sustentación a baja velocidad, y mucho empuje para acelerar a la distancia de despegue en una carrera en tierra lo más corta posible. Para aterrizar en una distancia corta podríamos querer también diseñar un avión con un ala grande y un alto coeficiente de sustentación máxima, pero ahora el empuje no es tan importante como la cantidad de fricción de frenado disponible a menos que sea empuje inverso de lo que estamos hablando.
Por supuesto que hay límites a considerar. El alto empuje minimizará la carrera de despegue en tierra, pero una vez que el empuje llegue a ser tan alto como el peso del avión, ¡también podríamos despegar verticalmente! Y una gran área de ala nos da un alto arrastre junto con una elevación alta. Sin embargo, podemos ver que tres parámetros; empuje, peso y área del ala, son factores importantes a considerar en el despegue.
Nos encontraríamos, si miráramos las ecuaciones que derivamos para los otros tipos de vuelo mencionados anteriormente, que estos mismos tres parámetros aparecen por todas partes. El único problema es que encontraríamos que sus relaciones en crucero no son necesariamente las mismas que en el despegue y aterrizaje. Y pueden ser diferentes todavía en ascenso.
Si queremos un avión que solo haga bien una cosa solo necesitamos mirar esa cosa. Si, por ejemplo, hiciéramos todo lo posible para crear un avión que pudiera despegar en una distancia muy corta y luego mirar su desempeño en crucero recto y nivelado probablemente encontraríamos que no es muy bueno. ¡Y su rendimiento de escalada puede ser aún peor!
Esto no es muy diferente de diseñar cualquier otro producto que sea capaz de realizar más de una tarea. Un automóvil puede ser diseñado para ir muy rápido o para obtener un buen kilometraje de gasolina, pero probablemente no ambos. Las llantas de automóvil pueden diseñarse para tener una alta tracción en el barro y la nieve o para dar un gran kilometraje a velocidades de carretera, pero cualquier intento de diseñar una llanta “todo clima touring” resultará en un compromiso con menos tracción que una llanta de barro y nieve y un rendimiento más pobre a altas velocidades que el diseño de llantas de carretera de alta velocidad.
La pregunta con el diseño de un avión como con un automóvil o una llanta, es ¿cómo llegamos al mejor compromiso que resultará en un buen diseño integral sin dejar de ser mejor que el promedio en una o dos áreas deseadas?
Una forma de abordar esto sería volver a las ecuaciones de capítulos anteriores e iterar entre ellas, tratando de encontrar áreas de alas, pesos y tamaños de motor que cumplieran nuestros objetivos de diseño. Podríamos comenzar con el crucero ya que un cierto rango mínimo suele ser un objetivo de diseño. Sabemos que en crucero ya que la elevación debe ser igual al peso, podemos seleccionar un valor de diseño del coeficiente de elevación de crucero (comúnmente alrededor de 0.2 a 0.3) y una velocidad y altitud de crucero deseadas y resolver para el área de ala necesaria.
S = 2W/ (ρ V 2 C L)
Si nuestro deseo es mirar un rango óptimo, es posible que queramos encontrar la relación de sustentación a arrastre que maximice el rango (por ejemplo, para un plano impulsado por hélice R max ocurre con vuelo a [L/D] max o en condiciones mínimas de arrastre). Encontrar este valor de arrastre establecería el empuje que necesitamos para el crucero. Dentro de todo esto podríamos ver los efectos de la relación de aspecto y el factor de eficiencia de Oswald para encontrar cómo la forma del plano del ala afectará nuestros resultados.
De esta manera, podemos encontrar valores de peso, área del ala y empuje que coincidan con nuestra capacidad de crucero deseada. Sin embargo, estos pueden no representar la mejor combinación de estos parámetros si otro de nuestros objetivos es lograr una cierta tasa de ascenso.
Otro factor a considerar sería la velocidad máxima deseada a la altitud del crucero. Esto se puede poner en la ecuación de arrastre con los números encontrados anteriormente para obtener el empuje o potencia necesaria para alcanzar esa velocidad máxima.
Los cálculos basados en cruceros mencionados anteriormente nos darían valiosa información de diseño para nuestro avión en función de una velocidad y altitud de crucero deseadas para un peso de diseño y nos dirían el área del ala y el empuje necesarios para esa condición de crucero y el empuje necesario para navegar a una velocidad máxima deseada. No nos diría, sin embargo, si esto resultaría en una buena capacidad para escalar o la capacidad de despegar y aterrizar a una distancia razonable. También tendríamos que mirar estos requisitos y nuestros objetivos de diseño.
Para ver si podemos subir a la velocidad deseada en un rango razonable de altitudes tendríamos que mirar la relación de ascenso:
dh/dt = [P avail — P req]/W
Esto nos daría otro valor de empuje necesario para alcanzar la tasa objetivo de ascenso para un peso dado y, dado que la ecuación contiene la potencia requerida, que es tiempos de arrastre velocidad, el área del ala también sería un factor.
Finalmente, tendríamos que mirar las relaciones de despegue y aterrizaje y nuestros valores objetivo para la carrera en tierra o para la distancia total de despegue o aterrizaje. Estas relaciones también involucran empuje, peso y área del ala.
La esencia de todo esto es que si incluso tenemos solo tres objetivos principales de diseño; una especificación de crucero, un requisito de ascenso y una restricción de despegue o aterrizaje, podemos terminar con tres valores diferentes para el área del ala y el empuje requeridos para un peso determinado de la aeronave. Entonces tendríamos que decidir cuál de estos tres requisitos era el más importante y cuál era el menos importante y luego comenzar a variar los parámetros de diseño de manera iterativa hasta que consigamos los tres objetivos para dar como resultado el mismo peso, área del ala y empuje del motor.
Este proceso se volvería aún más engorroso ya que agregamos otros objetivos de diseño como un radio de giro mínimo o una velocidad mínima de calado.
La pregunta es; ¿hay alguna manera de analizar todos estos al mismo tiempo y llegar a una decisión sobre valores de compromiso óptimos o razonables de peso, área del ala y empuje del motor sin tener que pasar por iteración tras iteración? Afortunadamente, la respuesta es sí. El método normalmente utilizado se denomina “análisis de restricción”.
9.1 Análisis de Restricciones
El análisis de restricciones es esencialmente una forma de observar el peso de la aeronave, el área del ala y el empuje del motor para varias fases del vuelo y tomar una decisión sobre los valores iniciales significativos de los tres parámetros para un conjunto dado de objetivos de diseño. Esto lo hace observando dos proporciones importantes, la relación de empuje a peso (T/W), la carga del ala o la relación peso-área planforme (W/S). O en algunos casos se utiliza la relación potencia-peso (P/W) en lugar de T/W, estas dos relaciones reflejan muy bien la filosofía de diseño y los objetivos de cualquier avión en particular.
Como dijo una vez uno de mis alumnos, la relación propulsor/peso (T/W) es una medida de la cantidad de cohete que es tu avión. Cuanto más eficiente es un avión en cosas como crucero menor es su valor de T/W El límite es un velero con T/W = 0 y en el otro extremo tenemos aviones de combate donde T/W se acerca a la unidad. Si T/W = 1.0 o mayor no necesitamos ala. El vehículo puede entrar al aire sin ningún tipo de ascensor. El valor de T/W dependerá de la velocidad de vuelo deseada, el área del ala y la eficiencia (L/D) del ala. En crucero donde lift = peso y empuje = arrastre, T/W = 1/[L/D], lo que significa que el alto valor de L/D que se necesita para un amplio rango va de la mano con una baja relación empuje/peso.
El otro parámetro, W/S, o carga de ala, también es generalmente bajo para los aviones de vela y alto para los cazas. La carga de ala para los aviones de vela suele estar en el rango de 5-8 libras por pie cuadrado, alrededor de 17 lb/pie 2 para aviones de aviación general y más de 100 lb/pie 2 para los cazas. Esta relación es una medida de la eficiencia aerodinámica así como una medida de la forma en que se diseña la estructura.
Estas dos proporciones están unidas entre sí en el rendimiento de la aeronave a través de la misma relación de potencia que observamos cuando examinamos por primera vez la subida y el deslizamiento.
9.2 Exceso de potencia específica
En un capítulo anterior sobre ascenso y deslizamiento observamos algo llamado exceso de poder específico y lo definimos como:
P s = [P avail — P req]/W = [(T — D) V]/W
Podemos, ojalá, recordar usar esta relación para encontrar la tasa de ascenso pero tal vez no recordemos que solo fue la tasa correcta de ascenso en un caso especial, donde la velocidad (V) era constante; es decir, la tasa estática de ascenso:
[dh/ dt] estática = [(T — D) V]/W
Si volvemos a ese capítulo anterior encontraremos que en una relación más general tuvimos:
P s = [P avail — P req]/W = [(T — D) V]/W = [dh/dt] + (V/g) (dV /dt).
En otras palabras, sólo cuando la velocidad (V) es constante es esta relación estrictamente igual a la velocidad de ascenso.
En realidad, la relación específica de exceso de potencia nos dice cómo el exceso de potencia del motor, P avail — P req, se puede utilizar para aumentar la energía potencial de la aeronave (subida) o su energía cinética (velocidad). En otras palabras, esta ecuación es realmente un balance energético. La potencia requerida es la potencia necesaria para mantener el vuelo recto y nivelado, es decir, para superar el arrastre e ir lo suficientemente rápido como para dar suficiente sustentación para igualar el peso. Si el motor es capaz de producir más potencia que la potencia requerida, ese exceso de potencia se puede utilizar para hacer que el avión acelere a una velocidad más rápida (aumentando la energía cinética) o para subir a una altitud mayor (aumentando la energía potencial), o para dar alguna combinación de ambos. Puede decirnos cuánta velocidad podemos ganar descendiendo a una altitud menor, convirtiendo la energía potencial en energía cinética, o cómo tal vez podemos subir por encima del techo estático de la aeronave convirtiendo el exceso de velocidad (energía cinética) en altitud extra (energía potencial).
En esencia esta es una relación bastante poderosa y puede ser utilizada para analizar muchas situaciones de vuelo y para determinar las capacidades de rendimiento de un avión. Veamos cómo se puede reorganizar la ecuación para ayudarnos a examinar las necesidades de rendimiento en varios tipos de vuelo.
Reordenando la ecuación que tenemos:
(T/ W) V = (D/W) V +dh/dt + (V/g) (dV/dt)
Ahora podemos ampliar el primer término en el lado derecho al darnos cuenta de que
D = (C D0 + kC L 2) ½ ρ V 2 S.
Sustituyendo esto por arrastre en la ecuación y dividiendo toda la ecuación por V podemos obtener:
(T/W) = [(C D0 + kC L 2) ½ ρ V 2 S) /W] + (1/ V) dh /dt + (1/g) (dV/dt)
Ahora bien, para simplificar un poco las cosas vamos a usar una sustitución común para la presión dinámica:
q = ½ ρ V 2.
También definiremos el coeficiente de sustentación en términos de levantamiento y peso utilizando la forma más general donde en un giro u otra maniobra la elevación puede ser igual al factor de carga n veces el peso.
C L = L/Qs = nW/Qs
Poner todo esto junto dará:
T/W = (qC D0)/(W/S) + (kn 2/q) (W/S) + (1/V) dh/dt + (1/g) dV /dt
En la ecuación anterior tenemos una ecuación de rendimiento muy general que puede hacer frente a cambios tanto en velocidad como en altitud y encontramos que estos cambios son funciones de la relación propulso/peso, T/W, y la carga del ala W/S Tenga en cuenta que así como la ecuación de arrastre es una función tanto de V como de 1/V, esta es una función tanto de W/S como de 1/ (W/S).
9.3 Vuelo recto y nivelado
Podemos usar la relación anterior para hacer gráficas de la relación propulsor/peso versus la carga del ala para varios tipos de vuelo. Si, por ejemplo, queremos mirar las condiciones para un vuelo recto y nivelado podemos simplificar la ecuación sabiendo que:
Vuelo recto y nivelado: n = 1, dh/dt = 0, dV/dt = 0, dando:
T/W = (qC D0)/(W/S) + (k/ q) (W/S)
Entonces, para una estimación dada del coeficiente de arrastre del perfil de nuestro diseño, la relación de aspecto y el factor de eficiencia de Oswald [k = 1/ (πARE)] podemos trazar T/W versus W/S para cualquier altitud (densidad) y velocidad de crucero seleccionadas.
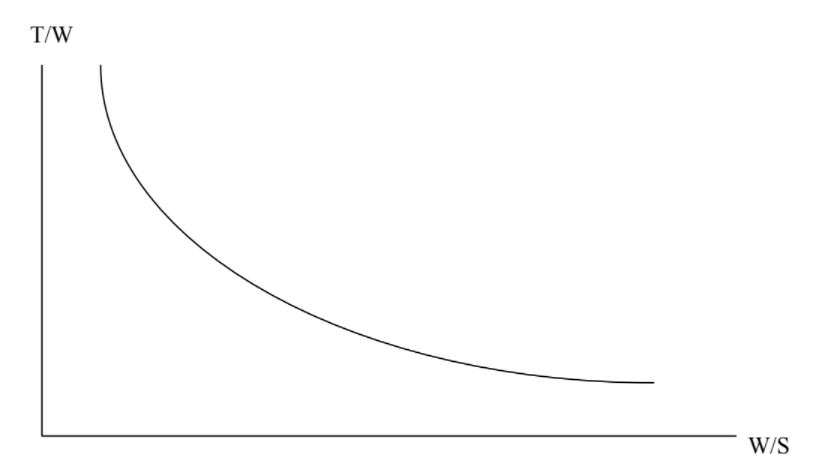
Podríamos obtener una curva diferente para diferentes velocidades y altitudes de crucero pero en cualquier combinación dada de estas esto nos dirá todas las combinaciones de valores de empuje-a-peso y cargas de alas que permitirán un vuelo recto y nivelado a esa altitud y velocidad.
Al entender lo que esto realmente nos dice tal vez necesitamos dar un paso atrás y mirar la misma situación de otra manera. En vuelo recto y nivelado sabemos:
L = W = QSc L
y T = D = Qs (C D0 + kC L 2)
Y si simplemente combinamos estas dos ecuaciones obtendremos la misma relación que trazamos anteriormente.
T/W = (qC D0)/(W/S) + (k/ q) (W/S)
De ahí que lo que hemos hecho a través de la relación específica de exceso de poder no es más que una forma diferente de obtener un resultado familiar. Simplemente terminamos escribiendo ese resultado en una forma diferente, en términos de la relación de empuje a peso y la carga del ala.
Hay que señalar que para hacer la trama de arriba teníamos que elegir una velocidad de crucero. Debemos tener en cuenta que hay límites para esa velocidad de crucero. No podemos volar recto y nivelado a velocidades por debajo de la velocidad de calado o por encima de la velocidad máxima donde el arrastre es igual al empuje máximo del motor. Podríamos poner estos límites en la misma trama si así lo deseamos. Por ejemplo, veamos el puesto.
En el establo V = [2W/ (ρ SC Lmax)] 1/2
Y esto se puede escribir [W/S] = ½ ρ V puesto 2 C Lmax
En la parcela por encima de esta sería una línea vertical, luciendo algo así
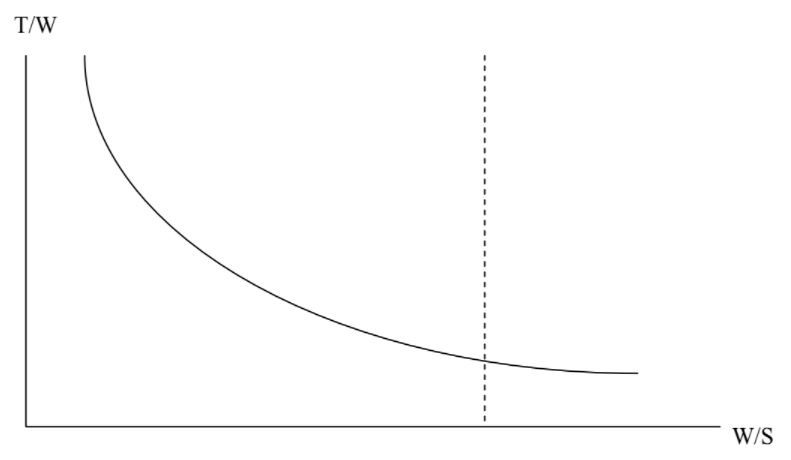
Aquí hay que señalar que el espacio a la derecha de la línea discontinua para el puesto está “fuera de límites” ya que para volar aquí requeriría un mayor coeficiente de sustentación máximo.
9.4 Subir
Podríamos volver a la reorganizada relación de exceso de poder
T/W = (qC D0)/(W/S) + (kn 2/q) (W/S) + (1/V) dh/dt + (1/g) dV /dt
y mira la subida en estado estacionario. Para subir a velocidad constante dV/dt = 0 y nuestra ecuación se convierte en
T/W = (qC D0)/(W/S) + (kn 2/q) (W/S) + (1/V) dh/dt
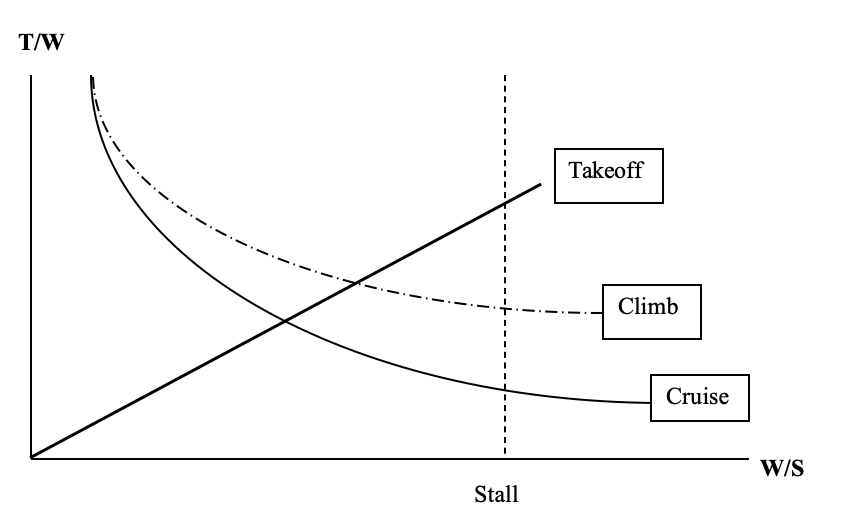
y podemos trazar T/W versus W/S tal como hicimos en el caso del crucero, esta vez especificando una tasa de ascenso deseada junto con la velocidad de vuelo y otros parámetros. Hacer esto agregará otra curva a nuestra trama y podría parecerse a la figura de abajo.
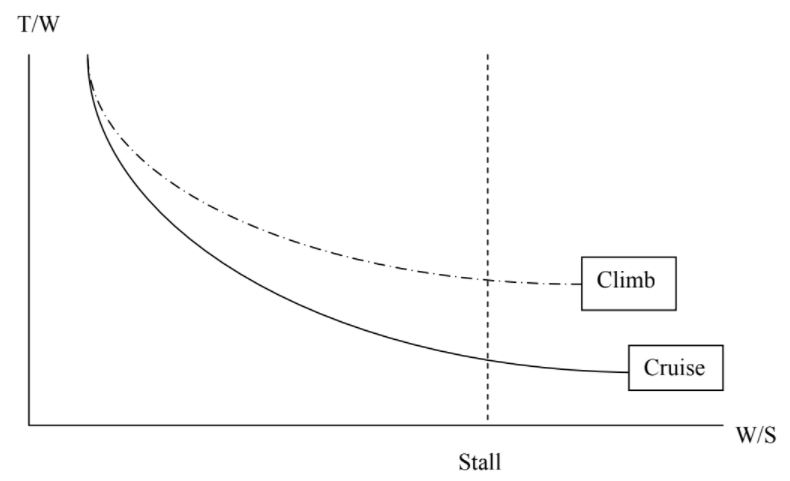
Esta adición a la trama nos dice lo obvio de alguna manera. Dice que necesitamos una relación empuje-peso más alta para subir que para volar recto y nivelar.
Cada trama de la ecuación de potencia específica que agregamos a esto nos da una mejor definición de nuestro “espacio de diseño”. Nos dice que para hacer que el avión haga lo que queremos que haga estamos restringidos a ciertas combinaciones de T/W y W/S.
9.4.1 Precaución
Cabe señalar que al trazar curvas para crucero y ascenso se debe seleccionar una velocidad de vuelo para cada una. Es, por ejemplo, un error común que los estudiantes miren los objetivos de rendimiento para el diseño de una aeronave y simplemente conecten los números dados sin pensar en ellos. Los objetivos de diseño pueden incluir una velocidad máxima en crucero de 400 mph y un objetivo de alcance máximo de 800 millas, sin embargo estos no ocurren en las mismas condiciones de vuelo. Así como un automóvil no puede obtener su mejor kilometraje de gasolina cuando el automóvil se mueve a máxima velocidad, un avión no va a obtener el máximo alcance a su velocidad máxima de crucero. De hecho, las ecuaciones utilizadas para encontrar el alcance máximo para un jet o un avión de proa asumen vuelo a velocidades muy bajas, velocidades que uno nunca usaría realmente en crucero a menos que esté desesperado por extender el alcance en alguna situación de emergencia. Al trazar la curva de crucero en una gráfica de análisis de restricciones se debe suponer que la aeronave está navegando a una velocidad de crucero “normal” deseada, que no será ni la velocidad máxima a esa altitud ni la velocidad para el rango máximo. Como ejemplo, la mayoría de los aviones con motor de pistón cruzarán con un ajuste de potencia del motor entre el 55% y el 75% de la potencia máxima del motor. Por otro lado, la curva de ascenso debe trazarse para condiciones óptimas; es decir, velocidad máxima de ascenso (condiciones mínimas de potencia requeridas para un avión de proa) ya que ese es el objetivo de diseño en ascenso.
9.5 Efectos de altitud
Obviamente, la altitud es un factor en el trazado de estas curvas. La curva de crucero normalmente se trazará a la altitud de crucero de diseño deseada. La curva de ascenso probablemente se trazaría en condiciones del nivel del mar ya que es ahí donde normalmente se especifica la tasa máxima de ascenso objetivo. Esto presenta un problema ya que estamos trazando las relaciones en términos de empuje y peso y el empuje es una función de la altitud mientras que el peso es indudablemente menor en crucero que en el despegue y ascenso inicial. Una forma de resolver este problema es escribir nuestras ecuaciones en términos de proporciones de empuje a altitud dividido por empuje al nivel del mar y peso a altitud dividido por peso al despegue.
T alt/T sl y W alt/W A.
Volviendo a nuestra ecuación principal:
T/W = (qC D0)/(W/S) + (kn 2/q) (W/S) + (1/V) dh/dt + (1/g) dV/dt,
reescribimos esto en términos de las proporciones anteriores para permitirnos hacer nuestras gráficas de análisis de restricciones funciones de T SL y W TO.
T SL/W A = [(W alt /W A)/( T alt /T SL)] {[q/(W alt /W SL )] (C D0)/(W A /S)
+ (kn 2/q) (W A /S) (W alt /W A) + (1/V) dh/dt + (1/g) dV /dt}.
Algunas referencias dan a estas proporciones, que se han puesto en cursiva arriba, símbolos como α y β para hacer que la ecuación parezca más simple.
Tenga en cuenta que la relación de empuje anterior es normalmente solo la relación de densidad, ya que normalmente se asume que
T alt/T sl = ρ alt/ρ SL.
9.6 Otros objetivos de diseño, incluido el despegue
¿Qué otros objetivos de diseño se pueden agregar a la gráfica de análisis de restricciones para definir aún más nuestro espacio de diseño? Uno que es bastante fácil de tratar es girar.
A menudo, un conjunto de objetivos de diseño incluirá un radio de giro mínimo o una velocidad de giro mínima. Si asumimos un giro coordinado encontramos que una vez más los dos últimos términos en la relación de análisis de restricciones van a cero ya que se realiza un giro coordinado a altitud y velocidad aerodinámica constantes. Todo lo que tenemos que hacer es ir a las ecuaciones de giro y encontrar la velocidad aerodinámica deseada y el factor de carga (n), ponerlos en la ecuación y trazarlo. Normalmente miraríamos los giros a las condiciones del nivel del mar y al peso de despegue. Esto daría una curva que se parece a las parcelas para crucero y ascenso.
El argumento que será diferente a todos estos es el para el despegue. La ecuación de despegue vista en un capítulo anterior es algo compleja porque las distancias de despegue dependen de muchas cosas, desde los coeficientes de arrastre hasta la fricción del suelo.
S A = (1/2B) ln [A/(A — BV A 2)]
donde A = g [(T 0 /W) — μ]
y B = (g/W) [½ ρ S (C D — μC Lg) + a].
Cabe recordar que C Lg es el valor del coeficiente de sustentación durante el balanceo de tierra, no en el despegue, y su valor es μ/2k para el recorrido teóricamente mínimo sobre el suelo. El último parámetro de la ecuación “B” anterior es “a”, término que aparece en la ecuación de empuje:
T = T 0 —Av 2,
una relación que proviene de la ecuación de impulso donde T 0 es el “empuje estático” o el empuje cuando el avión está parado.
Se puede observar que en los términos A y B respectivamente tenemos la relación de empuje a peso y la inversa de la carga del ala (W/S); por lo tanto, para un conjunto dado de parámetros de despegue y una distancia deseada de recorrido por el suelo (S TO) se puede hacer una gráfica de T/W versus W/S, esta relación demuestra ser un poco desordenado con ambas proporciones enterradas en un término de tronco natural y la carga del ala en un término separado. Una solución iterativa puede ser necesaria.
Un enfoque alternativo que a menudo se propone en los libros sobre diseño de aeronaves se basa en datos estadísticos de despegue recopilados en diferentes tipos de aeronaves. La siguiente figura (Raymer, 1992) se basa en un método comúnmente utilizado en la industria.
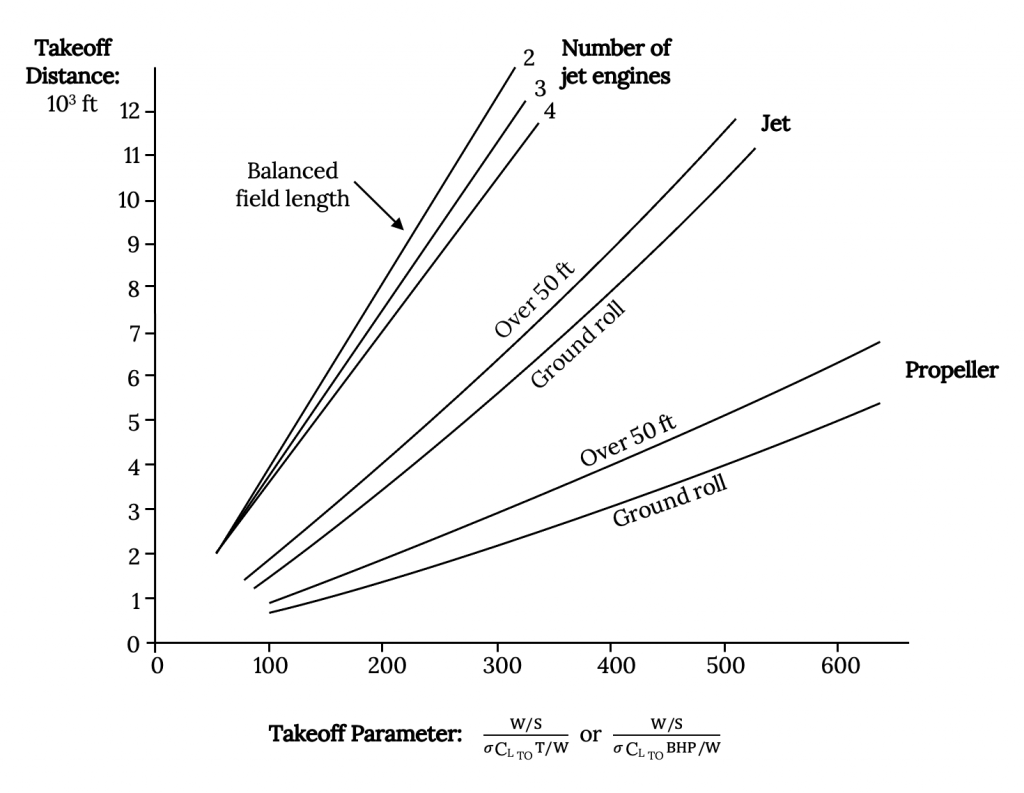
En este enfoque se propone un “Parámetro de despegue”, TOP, para ser una función de W/S, T/W, C LTO, y la relación de densidad sigma (σ) donde:
W/S = (TOP) σC LTO (T/W). [σ = ρ alt/ρ SL]
El valor de “TOP” se encuentra en el gráfico anterior. Se encuentra la distancia de despegue deseada en pies sobre el eje vertical y se proyecta sobre la parcela para el tipo de aeronave deseada, luego se deja caer una línea vertical al eje TOP para encontrar un valor para ese término. Una vez que se ha encontrado el valor de TOP se traza la relación anterior para dar una línea recta desde el origen de la gráfica de análisis de restricciones.
Dos cosas deben señalarse en este punto. Primero es que la figura de Raymer en la página anterior tiene dos tipos de parcelas en ella, una para la carrera de tierra solamente y la otra para la carrera de tierra más la distancia requerida para despejar un obstáculo de 50 pies. Cualquiera de ellos se puede utilizar dependiendo del parámetro de rendimiento que es más importante para cumplir con las especificaciones de diseño. La segunda es que el parámetro de despegue (TOP) definido para aviones de hélice se basa en requisitos de potencia (específicamente, requisitos de caballos de fuerza) en lugar de empuje. Para el avión de proa Raymer define TOP de la siguiente manera:
W/S = (TOP) σ C LTO (HP/W).
Cabe señalar aquí que a menudo es común cuando se realiza un análisis de restricción para una aeronave de tipo hélice trazar la relación potencia-peso frente a la carga del ala en lugar de usar la relación empuje/peso. Esto se puede hacer con bastante facilidad volviendo a las ecuaciones de análisis de restricciones y sustituyendo P/V en todas partes donde aparezca un término de empuje.
9.7 Aterrizaje
En realidad, la distancia de aterrizaje está determinada prácticamente por la velocidad de calado (el avión debe aterrizar a una velocidad mayor que la velocidad de calado, a menudo de aproximadamente 1.2 V Stall) y la pendiente de planeo (donde la holgura de obstáculos es parte de la distancia objetivo definida). Nuevamente es común que los textos de diseño de aeronaves propongan relaciones aproximadas o semiempíricas para describir esto y esas relaciones muestran que la distancia de aterrizaje depende únicamente de la carga del ala. Esto tiene sentido cuando uno se da cuenta de que, a menos que se use empuje inverso en la carrera en tierra de aterrizaje, el empuje no juega un papel importante en el aterrizaje. Raymer propuso la relación a continuación:
S aterrizaje = 80 (W/ S) [1/ (σC Lmax)] + S a
donde
S a = 1000 para un avión de pasajeros con un deslizamiento de 3 grados
600 para un enfoque de apagado de tipo aviación general
450 para un STOL 7 grados glideslope
Raymer también sugiere multiplicar el primer término a la derecha en la ecuación de distancia anterior por 0.66 si se van a usar inversores de empuje y por 1.67 cuando se contabiliza el margen de seguridad requerido para aviones comerciales que operan bajo FAR parte 25.
Obsérvese aquí que el peso en la ecuación es el peso de aterrizaje pero que al calcular esta distancia de aterrizaje para fines de diseño, el peso de despegue generalmente se usa para aviones y entrenadores de aviación general y se supone que es 0.85 veces el peso de despegue para los transportes a reacción.
La relación anterior, ya que no depende del empuje, trazará en nuestro gráfico de análisis de restricciones como una línea vertical de la misma manera que lo hizo el caso de bloqueo, pero será justo a la izquierda de la línea de calado.
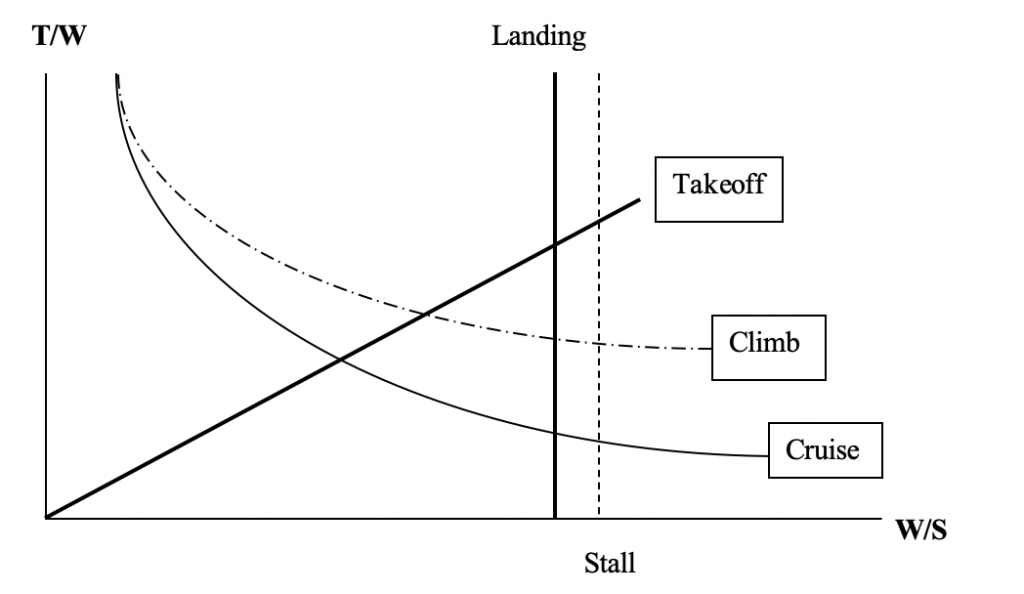
9.8 Puntos de diseño óptimos
En esta parcela final el espacio por encima de las curvas de ascenso y despegue y a la izquierda de la línea de aterrizaje es nuestro espacio de diseño aceptable. Cualquier combinación de W/S y T/W dentro de ese espacio cumplirá con nuestros objetivos de diseño. Lo que queremos, sin embargo, es la “mejor” combinación de estos parámetros para nuestros objetivos de diseño. El óptimo se encontrará en las intersecciones de estas curvas. En la figura anterior esto será donde se cruzan las curvas de despegue y ascenso o donde se cruzan las curvas de despegue y aterrizaje.
Por “óptimo” queremos decir que estamos buscando la relación mínima empuje/peso que permita al avión cumplir con sus objetivos de rendimiento y nos gustaría tener la mayor carga de ala posible. El deseo de empuje mínimo es obvio, basado en la necesidad de minimizar el consumo de combustible y el costo del motor. El objetivo de la carga máxima del ala puede no ser tan obvio para el diseñador novato, pero esto significa que el área del ala se mantiene al mínimo lo que da un menor arrastre. También da un mejor “paseo” a los pasajeros del avión. A medida que aumenta la carga de las alas, se minimizan los efectos de la turbulencia y las ráfagas en vuelo, suavizando los “baches” en vuelo.
9.9 El proceso de diseño
El análisis de restricciones es un elemento importante en un proceso más grande llamado diseño de aeronaves. Hay muchos buenos libros de texto disponibles sobre el diseño de aviones y el texto de Raymer al que se hace referencia anteriormente es uno de los mejores. Otro buen texto que combina un examen del proceso de diseño con una mirada como varios estudios de caso de diseño es Proyectos de Diseño de Aviones para Estudiantes de Ingeniería, de Jenkinson y Marchman, publicados por la AIAA.
El proceso de diseño generalmente comienza con un conjunto de objetivos de diseño como estos que hemos examinado, un rango deseado, peso de carga útil, velocidad de ascenso, distancias de despegue y aterrizaje, velocidad máxima, techo, etc. El primer paso en el proceso suele ser buscar lo que se llama avión “comparador”, existente o pasado aviones que puedan cumplir la mayoría o todos nuestros objetivos de diseño. Estos datos pueden darnos un lugar para comenzar sugiriendo valores iniciales de cosas como peso de despegue, área del ala, relación de aspecto, etc. que se pueden usar en las ecuaciones de análisis de restricciones anteriores. Estos son luego trazados para encontrar valores “óptimos” de carga de ala y relación empuje/peso.
El análisis de restricciones se puede realizar varias veces, observando los efectos de cosas variables como la relación de aspecto del ala en el resultado. El análisis puede sugerir que algunas de las “restricciones” (es decir, los objetivos de desempeño) necesitan ser relajadas. Qué se puede ganar aceptando una velocidad de crucero más baja o una distancia de despegue más larga. Podríamos encontrar, por ejemplo, que al aceptar 500 pies adicionales en nuestra carrera en tierra de despegue podemos arreglárselas con un motor significativamente más pequeño.
El diseño es un proceso de compromiso y ningún diseño es el mejor en todo. Pero a través del buen uso de cosas como los métodos de análisis de restricciones podemos convertir esos compromisos en soluciones óptimas.
Agradecimiento: Gracias a Dustin Grissom por revisar lo anterior y desarrollar ejemplos para acompañarlo.
Tareas 9
Volviendo a mirar el avión en la tarea 8 con alguna información adicional:
| Cessna 182 | Cita Cessna III |
|---|---|
| b = 35.8 ft | b = 53.3 ft |
| S = 174 pies^2 | S = 318 pies^2 |
| W_máx = 2950 lb | W_max = 19,815 lb |
| Combustible = 65 gal (@ 6 lb/gal) | Combustible = 1119 gal (@ 6.67 lb/gal) |
| Motor único 230 hp en SL | 2 motores con empuje de 3650 lb cada uno en SL |
| eta_p = 0.8 | |
| gamma_p = 0.45 lb/hp-hr | Gamma_t = 0.6 lb/lb_esfuerzo-hora |
| C_D0 = 0.025 | C_Do = 0.02 |
| e = 0.8 | e = 0.81 |
1. Encuentra el alcance máximo y la máxima resistencia para ambos aviones.
a. ¿Qué altitud da el mejor alcance para el C-182? ¿Crees que esta es una velocidad razonable para el vuelo?
b. ¿Qué altitud da la mejor resistencia para el C-182? ¿Es esta una velocidad de vuelo razonable?
c. La resistencia para el C-182 se puede encontrar de dos maneras (altitud constante o velocidad constante). ¿Cuál da la mejor resistencia?
2. Encuentra el alcance para el C-182 asumiendo que el vuelo comienza a 150 mph y una altitud de 7500 pies y se mantiene en ángulo de ataque constante.
3. ¿Qué tan sensible es el rango máximo para la relación de aspecto de Cessna 182 y el factor de eficiencia de Oswald, es decir, a la forma plana del ala? Para responder a esto, rango de gráfico versus relación de aspecto usando e.= 0.8 y variando AR de 4 a 10, y rango de gráfico versus e para una relación de aspecto de 7.366 con e variando de 0.6 a 1.0.
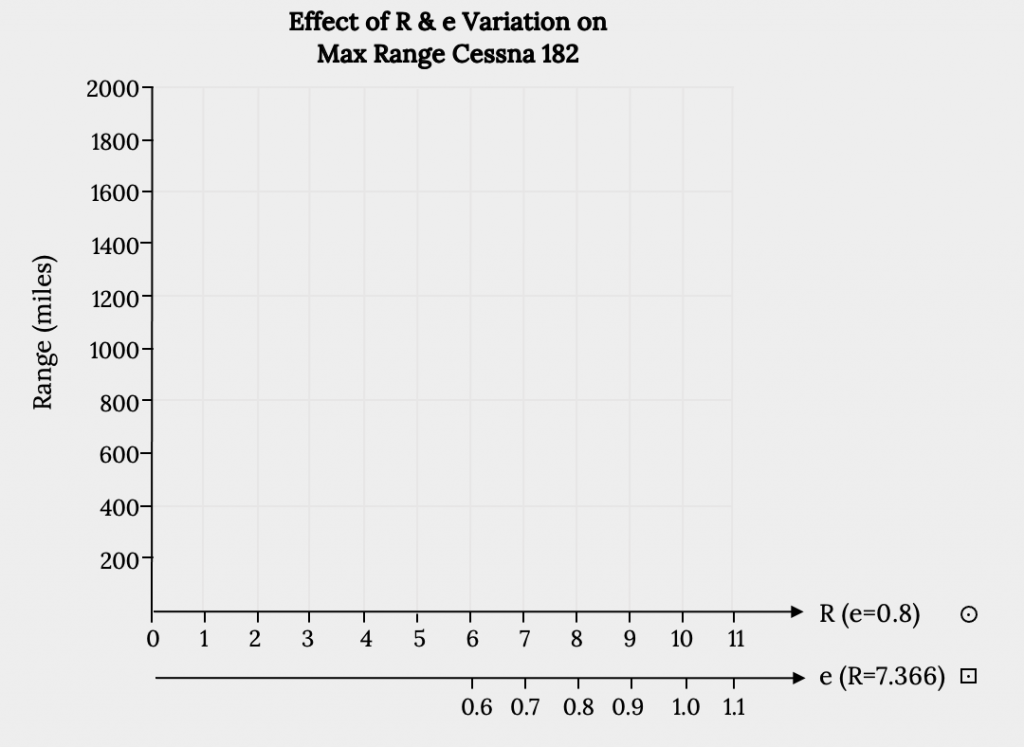
Figura 9.7: Efecto de la variación R & e sobre el rango máximo Cessna 182
Referencias
Raymer, Daniel P. (1992). Diseño de Aeronaves: Un Enfoque Conceptual, AIAA, Washington, DC.
Figura 9.1: James F. Marchman (2004). “Relación Inversa entre la Relación de Empuje/Peso y la Relación de Peso a Superficie”. CC BY 4.0.
Figura 9.2: James F. Marchman (2004). “Corte de calado para valores de tapa W sobre tapa S”. CC BY 4.0.
Figura 9.3: James F. Marchman (2004). “Efectos de una tasa de ascenso deseada en el espacio de diseño de aeronaves”. CC BY 4.0.
Figura 9.4: Gris Kindred (2021). “Efecto de los parámetros de la aeronave en la distancia de despegue”. CC BY 4.0. Adaptado de Raymer, Daniel P. (1992). Diseño de Aeronaves: Un Enfoque Conceptual, AIAA, Washington, DC. Disponible en https://archive.org/details/9.4_20210805
Figura 9.5: James F. Marchman (2004). “Efecto de las características de despegue deseadas en el espacio de diseño de aeronaves”. CC BY 4.0.
Figura 9.6: James F. Marchman (2004). “Efecto de las características de aterrizaje deseadas en el espacio de diseño de aeronaves”. CC BY 4.0.
Figura 9.7: Gris Kindred (2021). “Efecto de la variación de R & e sobre el rango máximo Cessna 182.” CC BY 4.0. Adaptado de James F. Marchman (2004). CC BY 4.0. Disponible en https://archive.org/details/hw-9_20210805
<! — pb_fixme —><! — pb_fixme —>