El tema de este problema es la respuesta de frecuencia de un circuito\(RC\) de filtro de paso de banda. La función de transferencia apropiada es la Ecuación 13.1.5:\[T F_{B}(s)=\frac{L\left[e_{o}\right]}{L\left[e_{i}\right]}=\frac{\tau_{H} s}{\left(\tau_{H} s+1\right)\left(\tau_{L} s+1\right)}=\frac{\omega_{L} s}{\left(s+\omega_{H}\right)\left(s+\omega_{L}\right)} \nonumber \] en la que\(\omega_{L} \equiv 1 / \tau_{L}\) se encuentra la frecuencia de interrupción de paso bajo y\(\omega_{H} \equiv 1 / \tau_{H}\) es la frecuencia de interrupción de paso alto, y para el funcionamiento de paso banda generalmente se especifica que\(\omega_{H}<<\omega_{L}\).
Esta función de transferencia tiene (en el\(s\) plano -plano) un cero en el origen y polos en\(-\omega_{H}\) y\(-\omega_{L}\). Considerar el caso de respuesta de frecuencia:\(s=j \omega\),\(\omega \geq 0\). Esboce una gráfica del\(s\) plano -que muestre el cero y los polos, y dibuje en la gráfica tres vectores complejos con colas en el cero y los polos, y cabezas en un punto arbitrario\(s=j \omega\) en el eje imaginario positivo. Utilice esta construcción gráfica para derivar la función frecuencia-respuesta en la forma polar\(F R F(\omega)=M R(\omega) e^{j \phi(\omega)}\), en la que se derivan fórmulas explícitas para relación de magnitud\(M R(\omega)\) y ángulo de fase\(\phi(\omega)\). [NOTA: Este método gráfico de derivar (o calcular) una función de frecuencia-respuesta es algo similar (pero más simple que) el método de locus raíz general de Evans descrito en la Sección 16.5, siendo el “locus” en este caso el eje imaginario positivo; véase, en particular, la figura no numerada que directamente sigue la Ecuación 16.5.7.] Respuesta parcial:\(\phi(\omega)=\pi / 2-\tan ^{-1}\left(\omega / \omega_{H}\right)-\tan ^{-1}\left(\omega / \omega_{L}\right)\) radianes
Deje\(\omega_{H}=5\) rad/s y\(\omega_{L}=500\) rad/s Adapte el código MATLAB que produjo la Figura 17.1.3 para calcular e imprimir un diagrama Bode modificado para este filtro de paso de banda en particular. Su diagrama debe mostrar que las señales a frecuencias entre aproximadamente 10 y 200 rad/s se pasan a través de este filtro con muy poca reducción de amplitud y relativamente poco cambio de fase, pero que las señales a frecuencias por debajo de aproximadamente 0.5 rad/s y por encima de aproximadamente 5,000 rad/s son efectivamente “filtradas”, eliminadas.
En estos ejercicios, utilizará la función MATLAB M-files y el comando MATLAB fzero para calcular algunos resultados que se indican pero no se derivan explícitamente en el Capítulo 17.
Calcular para al menos una de las ganancias\(\Lambda=4,000\) s-2 y\(400,000\) s -2 el valor más preciso de PM que se anota en la Figura 17.1.3. El procedimiento se basa en la definición de\(\operatorname{PM}(\Lambda)\) la Ecuación 17.1.10, que muestra que se necesita encontrar la frecuencia\(\omega_{\mathrm{PM}}\) a la que\(|O L F R F(\omega)|_{\Lambda} \mid=1\), es decir, la frecuencia de cruce de ganancia. En consecuencia, escriba una función M-file que utilice la Ecuación 17.1.7 para calcular la cantidad\(|O L F R F(\omega)|_{\Lambda} \mid-1\). Después calcula\(\omega_{\mathrm{PM}}\) llamando a esa función M-file con el comando fzero, en el que también incluyes una estimación para la\(\omega_{\mathrm{PM}}\) que lees de la Figura 17.1.3. Finalmente, use nuevamente la Ecuación 17.1.7\(\left.\angle O L F R F(\omega)\right|_{\Lambda}\) para calcular\(\omega=\omega_{\mathrm{PM}}\), y sustituya ese resultado en la Ecuación 17.1.10 para obtener el valor más preciso de\(\operatorname{PM}(\Lambda)\).
Calcular para al menos uno de los puntos de estabilidad neutra de la Figura 17.4.3 el valor más preciso de ganancia (\(\Lambda_{n s 1}\)y/o\(\Lambda_{n s 2}\)) que se establece en el texto de la Sección 17.4. El procedimiento se basa en establecer a cero la parte real de la raíz apropiada de la ecuación característica, Ecuación 17.4.4. En consecuencia, escriba una función M-file que primero determine con el comando root las tres raíces de la ecuación 17.4.4, luego use las características de control de flujo MATLAB (tal vez un bucle for que contenga un bucle if, o alguna alternativa de su elección) para seleccionar la raíz de las tres que tiene una parte imaginaria positiva, y finalmente calcula la parte real de esta raíz. Después calcula lo requerido\(\Lambda_{n s}\) llamando a esa función M-file con el comando fzero, en el que también incluyes una estimación para el\(\Lambda_{n s}\), que lees de la Figura 17.4.3. [Ver tarea Problema 16.8.2 para un método diferente de solución.]
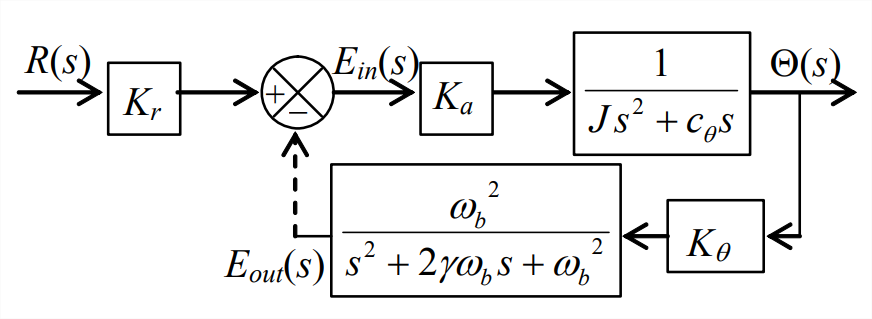
En este problema, vuelva a visitar el sistema de tarea Problema 16.5: se trata de un rotor amortiguado con retroalimentación de posición que es filtrado de paso bajo de segundo orden. Utilice los mismos valores de componentes:\(\omega_{b}=300\) rad/s,\(c_{\theta} / J=100\) s -1 y\(\gamma= 1 / \sqrt{2}\). También como antes, denotar el parámetro de ganancia variable del sistema de control como\(\Lambda \equiv K_{a} K_{\theta} / J\).
Figura\(\PageIndex{1}\) (Copyright; autor vía fuente)
Mostrar que la función de transferencia de bucle abierto es\[O L T F(s) \equiv \frac{E_{o u t}(s)}{E_{i n}(s)}=\Lambda \frac{\omega_{b}^{2}}{s\left(s+c_{\theta} / J\right)\left(s^{2}+2 \gamma \omega_{b} s+\omega_{b}^{2}\right)} \nonumber \]
Tarea Problema 16.5.2 mostró lo siguiente mediante análisis loci-de-raíces para el sistema de bucle cerrado: Su tarea es evaluar la estabilidad nuevamente para\(\Lambda=3,400\) s -2 y para\(\Lambda=\Lambda_{n s}\), pero ahora usando criterios de frecuencia-respuesta. Defina el rango de excitación-frecuencia de interés para que sea la banda\(10 \leq \omega \leq 1000\) rad/s Primero, use los comandos apropiados para calcular la función de frecuencia-respuesta de bucle abierto de línea base, es decir,\(\operatorname{OLFRF}(\omega)\) para\(\Lambda=1\) s -2. Ahora, utilice MATLAB para calcular y trazar en algún tipo (su elección) de diagrama Bode las curvas de relación de magnitud y ángulo de fase sobre la banda de frecuencia definida, tanto para\(\Lambda=3,400\) s -2 como para\(\Lambda=\Lambda_{n s}\). Estime a partir de su diagrama Bode el margen de ganancia GM (tanto en forma decimal como en dB) y el margen de fase PM (en grados) para ambos valores de\(\Lambda\).
\(\Lambda \equiv \Lambda_{n s}=22,000\)s -2 es la ganancia de estabilidad neutra, el límite superior de estabilidad; y
para\(\Lambda=3,400\) s -2, el sistema es estable, siendo el modo dominante oscilatorio y teniendo relación de amortiguación\(\zeta \approx 1 / \sqrt{2}\).
Utilice la función margin de MATLAB para validar la exactitud de sus márgenes de estabilidad estimados en la parte 17.3.2.
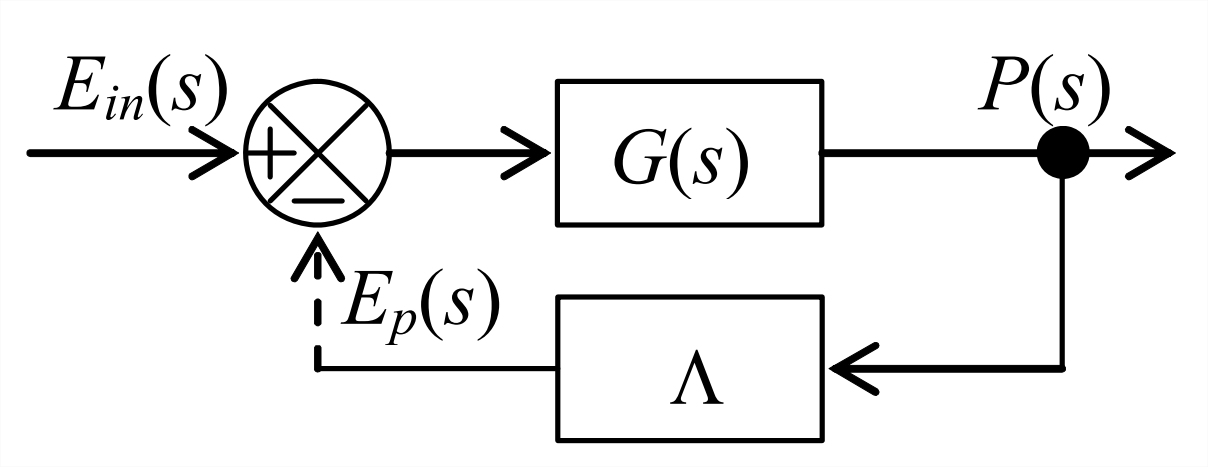
Supongamos que tiene un motor rotativo LTI con función de transferencia desconocida\(G(s)\). La entrada es una señal de voltaje\(e_{i n}(t)\), y la salida es la velocidad del eje\(\dot{\theta}(t) \equiv p(t)\). Desea controlar la velocidad del eje detectándola con un tacómetro, que tiene ganancia variable\(\Lambda\), y alimentando la señal\(e_{p}(t)\) de voltaje del tacómetro a la entrada en la forma estándar que se muestra en el diagrama de bloques de Laplace.
Figura\(\PageIndex{2}\) (Copyright; autor vía fuente)
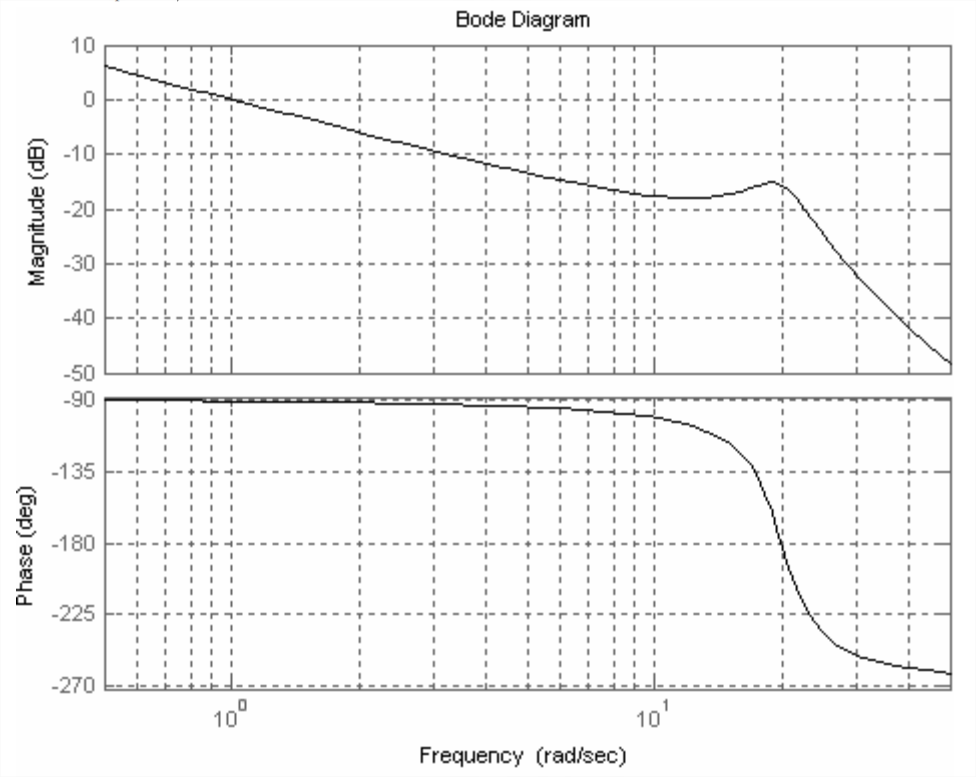
Para evaluar la estabilidad del sistema de circuito cerrado, se realiza una prueba de frecuencia-respuesta de barrido senoidal escalonado en el sistema estable de bucle abierto, que consiste en el motor y el tacómetro en serie, con la ganancia establecida en\(\Lambda=0.4\) voltios por rad/s. sistema de bucle con voltaje de entrada sinusoidal\(e_{i n}(t)=V_{i n} \sin \omega t\) con la frecuencia que aumenta en pequeños incrementos a través del rango\(0.5 \leq \omega \leq 50\) rad/s, mide en cada frecuencia de permanencia sinusoidal el voltaje de salida sinusoidal de estado estacionario\(e_{p}(t)=V_{p}(\omega) \sin [\omega t+\phi(\omega)]\), y luego traza los resultados para\(V_{p}(\omega) / V_{i n}\) y\ phi (\ omega), lo que lleva a el siguiente diagrama:
Figura\(\PageIndex{3}\) (Copyright; autor vía fuente)
¿El sistema de bucle cerrado sería estable con la ganancia del tacómetro para la que se aplican los datos anteriores,\(\Lambda=0.4\) volt/ (rad/s)? Si es así, calcule a partir del diagrama anterior, con tanta precisión como lo permitan las parcelas, el margen de fase PM y el margen de ganancia GM de estabilidad. Indique las representaciones gráficas de su PM y GM en un boceto o fotocopia del diagrama.
¿El sistema de circuito cerrado sería impulsado inestable por algún valor positivo de ganancia del tacómetro\(\Lambda>0\)? Si es así, estime esos valores. Explica tu razonamiento con claridad.
La Figura 17.2.1 está en el formato bidimensional tradicional de una gráfica Nyquist, es decir,\(\operatorname{Im}[F R F(\omega)]\) versus\(\operatorname{Re}[F R F(\omega)]\), en la que la frecuencia de excitación\(\omega\) es la variable independiente implícita. Pero este formato podría considerarse insatisfactorio para muchos propósitos porque carece de una escala graduada para\(\omega\). Una gráfica Nyquist de formato mejorado, una gráfica tridimensional, puede mostrar dicha escala graduada de frecuencia además de las escalas de los componentes rectangulares,\(\operatorname{Re}[F R F(\omega)]\) y\(\operatorname{Im}[F R F(\omega)]\). Para explorar ese formato, ejecute en MATLAB la siguiente versión alternativa de los comandos que produjeron la Figura 17.2.1, que aplica, en particular, el comando plot3 para trazar tridimensionalmente:
>> wn=2*pi; zt=0.2;
>> w=wn* (0:0. 05:2 .5);
>> frf=wn^2. /(wn^2-w.^2+j*2*zt*wn*w);
>> plot3 (real (frf), imag (frf), w/wn), rejilla
>> eje igual
Estos comandos deben producir una gráfica tridimensional en la que el\(\operatorname{Re}[F R F(\omega)]\) eje (el\(x\) eje -eje) se extiende desde\(\approx-1\) hasta\(\approx+1.5\), el\(\operatorname{Im}[F R F(\omega)]\) eje (el\(y\) eje -eje) se extiende de 0 a −2.5, y el\(\omega / \omega_{n}\) eje (el\(z\) eje -eje) se extiende de 0 a 2.5. Hacer una impresión de la gráfica inicial, que probablemente será de la “Vista 3D por defecto” (acimut =\(-37.5^{\circ}\), elevación =\(-30^{\circ}\); Ortográfica, no Perspectiva). La Vista 3-D de Referencia, acimut =\(0^{\circ}\) y elevación=\(0^{\circ}\), es de\(y=-\infty\) mirar exactamente en la\(+ y\) dirección, por lo que es una proyección bidimensional del\(z\) plano\(x\) -. El ángulo acimutal es la rotación positiva (en el sentido de la regla de la derecha) del punto de vista alrededor del\(z\) eje, con relación a la Vista 3-D de Referencia; así, por ejemplo, la vista acimut =\(90^{\circ}\) y elevación=\(0^{\circ}\) es de\(x=+\infty\) mirar exactamente en la\(− x\) dirección, una de dos- proyección dimensional del\(z\) plano\(y\) -.
Considere dos frecuencias de excitación consecutivas en un experimento de frecuencia-respuesta, denotadas como\(\omega_{i}\) y\(\omega_{j}\), con\(\omega_{j}>\omega_{i}\) [por ejemplo, dos valores consecutivos en la serie representada por el comando MATLAB w=wn* (0:0. 05:2 .5)], y denotan\(\Delta \omega_{i j}=\omega_{j}-\omega_{i}\); denotan el cambiar de\(\omega_{i}\) y\(\omega_{j}\) del componente en fase\(\operatorname{Re}[F R F(\omega)]\) como\(\Delta x_{i j}\), y el del componente de cuadratura\(\operatorname{Im}[F R F(\omega)]\) como\(\Delta y_{i j}\); luego el segmento de línea entre esos dos puntos en el\(\operatorname{Re}[F R F(\omega)]\) plano\(\operatorname{Im}[F R F(\omega)]\) -versus- (por ejemplo, Figura 17.2.1, el\(x\) - \(y\)plano) es\(\Delta s_{i j} =\sqrt{\Delta x_{i j}^{2}+\Delta y_{i j}^{2}}\). Los ingenieros que realizan pruebas de vibración de frecuencia-respuesta de barrido senoidal escalonado en sistemas resonantes (como el de este problema) consideran que la tasa de cambio\(\Delta s_{i j} / \Delta \omega_{i j}\) es una cantidad físicamente significativa que conduce a la determinación experimental de la frecuencia natural de un sistema,\(\omega_{n}\). Describa cómo sus gráficas Nyquist tridimensionales (desde cualquier punto de vista que se requiera) demuestran que\(\Delta s_{i j} / \Delta \omega_{i j}\) es máximo en frecuencias de excitación cercanas\(\omega_{n}\), pero está por debajo del máximo en frecuencias tanto por encima como por debajo\(\omega_{n}\).
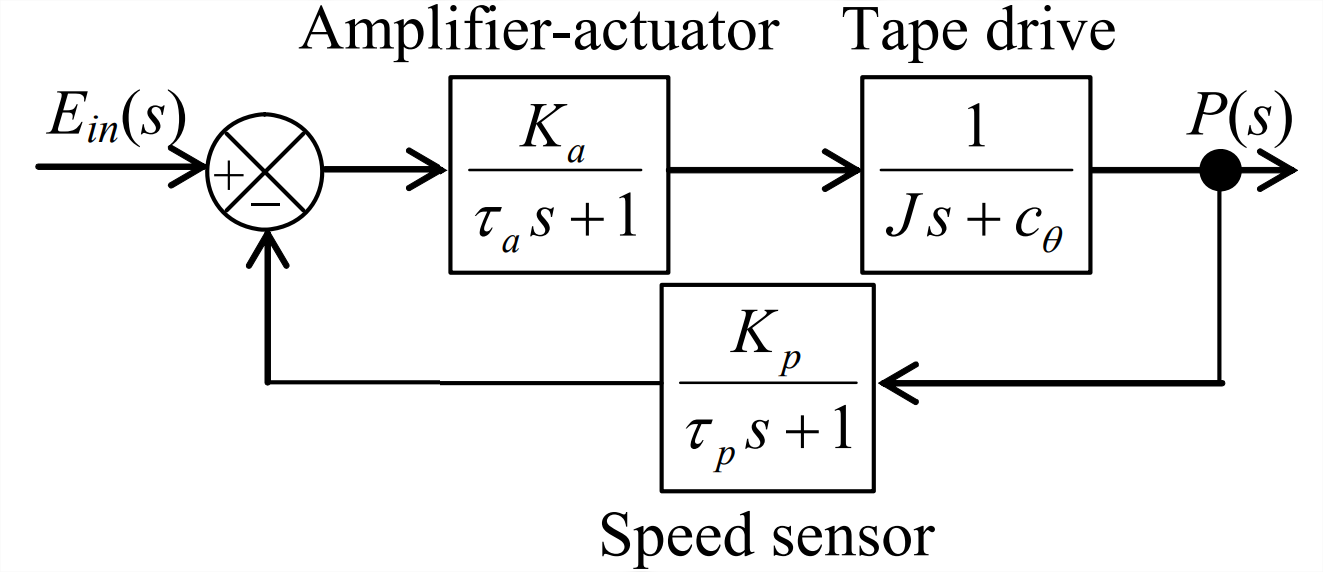
En este problema, vuelva a visitar el sistema de tarea Problema 16.7: el diagrama de bloques de Laplace del sistema de control de velocidad de una unidad de cinta magnética se muestra en la figura de la página siguiente. La configuración del operador es la señal de voltaje de entrada\(e_{i n}(t)\), cuya transformada de Laplace es\(E_{i n}(s)\). Cada subsistema principal del sistema de control funciona como un sistema de primer orden. El subsistema que consiste en un amplificador de potencia y un actuador de par tiene sensibilidad variable\(K_{a}\) (N-m/V) y constante de tiempo\(\tau_{a}=1.0\) s. el accionamiento de cinta tiene inercia rotacional\(J=4.0\) N-m por rad/s 2 y constante de amortiguación viscosa de eje lubricado\(c_{\theta}=1.0\) N-m por rad/s; la salida de la unidad de cinta en esta aplicación es velocidad de rotación\(p(t)\) en rad/s [con transformada Laplace\(P(s)\)], no posición rotacional\(\theta(t)\). El sensor de velocidad de rotación en la rama de retroalimentación tiene sensibilidad\(K_p = 1.250\) V por rad/s; este sensor es suficientemente lento en relación con los otros subsistemas que debemos dar cuenta de su constante de tiempo,\(\tau_{p}=0.50\) s.
Figura\(\PageIndex{4}\) (Copyright; autor vía fuente)
Definir el parámetro de ganancia de control como\(\Lambda=K_{a} K_{p} /\left(J \tau_{a} \tau_{p}\right)\), con unidades de s-3, muestran que la función de transferencia de bucle cerrado es\(\frac{P(s)}{E_{i n}(s)}=\frac{K_{a}}{J \tau_{a}} \frac{s+\tau_{p}^{-1}}{\left(s+c_{\theta} / J\right)\left(s+\tau_{a}^{-1}\right)\left(s+\tau_{p}^{-1}\right)+\Lambda}\). Considere la respuesta a una entrada unidad-paso,\(e_{i n}(t)=(1.0 \mathrm{V}) H(t)\). Utilice el teorema del valor final (asumiendo la estabilidad del sistema) para encontrar una ecuación en términos de los parámetros del sistema para la respuesta de estado estacionario, después de que todos los transitorios hayan decaído,\(\lim _{t \rightarrow \infty} p(t)\). Seleccione el valor de sensibilidad\(K_a\) que hace que la sensibilidad general en estado estacionario del sistema de control sea de 0.750 rad/s por voltio, luego calcule la ganancia\(\Lambda\) correspondiente a ese valor de\(K_a\). (solución parcial:\(\Lambda=7.50\) s -3)
Mostrar que la función de frecuencia-respuesta de bucle abierto se puede escribir como\(O \operatorname{LFRF}(\omega)= \Lambda \times \frac{1}{\left(j \omega+c_{\theta} / J\right)\left(j \omega+\tau_{a}^{-1}\right)\left(j \omega+\tau_{p}^{-1}\right)}\). Calcular para los valores de parámetros dados la frecuencia de cruce de fase\(\omega_{n s}\), es decir, la frecuencia a la que\(\angle O L F R F(\omega)=-\pi\) los radianes\(= -180^{\circ}\); esta tarea requerirá la solución numérica de una ecuación trascendental, que es posible que desee lograr aplicando la función MATLAB fzero de la manera descrita en la tarea Problema 17.2. A continuación, calcular para el caso basal,\(\Lambda=1\) s -3, la relación de magnitud en el cruce de fase\(M R_{1}\left(\omega_{n s}\right)\), y el margen de ganancia correspondiente, GM 1. (solución parcial: GM 1 = 8.4375)
Consideremos ahora la ganancia determinada en la parte (a),\(\Lambda=7.50\) s -3. Calcular la relación de magnitud en el cruce de fase\(M R_{7.50}\left(\omega_{n s}\right)\), y el margen de ganancia correspondiente,\(\mathrm{GM}_{7.50}\). Calcule el margen de fase\(\mathrm{PM}_{7.50}\),, usando la ecuación para\(O L F R F(\omega)\) de part (b) —para hacer esto, primero necesitará encontrar la frecuencia de cruce de ganancia\(\omega_{1}\) [\(M R_{7.50}\left(\omega_{1}\right)=1\)], que podría querer lograr aplicando nuevamente la función MATLAB fzero de la manera descrita en homework Problema 17.2; entonces necesitará calcular el ángulo de fase\(\angle O L F R F\left(\omega_{1}\right)\) para usar en la definición de margen de fase.
Para validar su trabajo en las partes anteriores, produzca un diagrama que muestre las gráficas de Nyquist para ambos valores de ganancia,\(\Lambda=1\) y 7.50 s -3; tal vez desee adaptar para este caso el código de MATLAB que produjo la Figura 17.4.4. ¿Cuál es su valoración, basada en los márgenes de ganancia y fase, del sistema de control con ganancia\(\Lambda=7.50\) s -3?
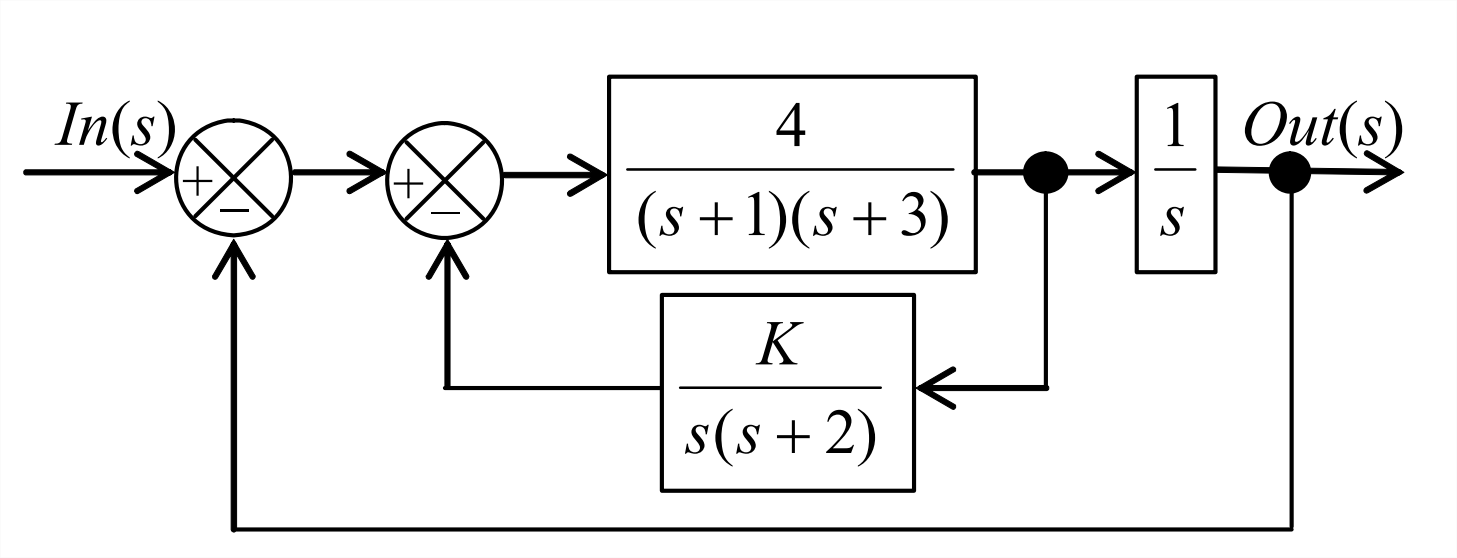
Considere el sistema de control de retroalimentación representado en el diagrama de bloques de Laplace a la derecha. Supongamos que las unidades de todas las constantes son consistentes, y no se moleste en etiquetar unidades.
Figura\(\PageIndex{5}\) (Copyright; autor vía fuente)
Combine los dos bucles de retroalimentación con álgebra de diagrama de bloques para mostrar que las funciones de transferencia forward branch y feedback-branch se pueden escribir, respectivamente, como:\(G(s)=\frac{4}{s(s+1)(s+3)}\) y\(H(s)=\frac{s+(2+K)}{s+2}\). Aplicar los criterios de Routh, como se describe en la tarea Problema 16.9.3, para determinar el rango de la constante de sensibilidad\(K\) sobre la cual el sistema de control es estable.
Utilice cualquier método de su elección para determinar el valor\(K\) para el cual el margen de fase PM es aproximadamente\(35^{\circ}\). Obsérvese que la ecuación característica de este sistema no tiene la forma de ninguna de las Ecuaciones 16.6.3: ésta\(K\) no juega el papel de\(\Lambda\) en las Ecuaciones 16.6.3. Por lo tanto, muchas de las ecuaciones desarrolladas en el Capítulo 17, como las Ecuaciones 17.1.11-17.1.16, no son aplicables en este problema.
Para validar su trabajo en las partes (a) y (b), produzca un diagrama que muestre los gráficos de Nyquist para dos valores de\(K\): tanto para la estabilidad neutra (el límite superior\(K\) para la estabilidad del sistema), como para\(\mathrm{PM} \approx 35^{\circ}\); es posible que desee adaptar para este caso el código MATLAB que produjo la Figura 17.4. 4. Explique las características de las gráficas Nyquist que confirman la exactitud de sus resultados en las partes (a) y (b), utilizando anotaciones en el diagrama y/o discusión escrita.
Su tarea en este problema es derivar, con la ayuda de las capacidades simbólicas de MATLAB, la ecuación 17.3.2 de respuesta de “estado estacionario”, que incluye la deriva lineal inestable debido al polo de la función de transferencia de bucle abierto en\(s=0+j 0\). Debido a que las ecuaciones que produce MATLAB son largas y complicadas, será ventajoso separar la función de entrada de voltaje Ecuación 17.3.1 en las dos partes siguientes:\[e_{i n_{1}}(t)=E_{i n} \sin \omega t \quad \text { and } \quad e_{i n 2}(t)=E_{o f f} H(t) \nonumber \] Para cada una de estas partes individualmente buscará la solución de salida de voltaje, respectivamente,\(e_{\text {outl}}(t)\) y\(e_{\text {out} 2}(t)\), entonces sumarás los dos para obtener la respuesta total.
La transformada de Laplace de\(e_{\text {outl}}(t)\), con el uso de la Ecuación 17.1.2 y la Ecuación 2.4.7, es\[L\left[e_{\text {out } 1}(t)\right]=L\left[e_{i n 1}(t)\right] \times O L T F(s)=E_{\text {in}} \frac{\omega}{s^{2}+\omega^{2}} \times \Lambda \frac{\omega_{b}}{s\left(s+c_{\theta} / J\right)\left(s+\omega_{b}\right)} \nonumber \] Usted podría ser capaz de encontrar la transformación inversa de esta ecuación en alguna referencia, pero es probable que un proceso más eficiente sea definir la ecuación simbólicamente en MATLAB y luego usar el comando ilaplace para encontrar la transformada inversa. El aspecto menos atractivo de este enfoque es que la solución inicial de MATLAB probablemente será larga y difícil de interpretar. Para convertir la ecuación de solución inicial en una forma más transparente, usa los comandos simples y bonitos. Se busca la respuesta de “estado estacionario”, así que descarta (de la ecuación que se muestra después del uso de pretty) los términos transitorios que involucran las funciones de tiempo\(e^{-\left(c_{\theta} / J\right) t}\) y\(e^{-\omega_{b} t}\). En este punto, deberías poder expresar la solución en la forma:\[\frac{e_{o u t 1}(t)}{E_{i n}}=\frac{\Lambda}{\omega\left(c_{\theta} / J\right)}+\Lambda \omega_{b} \frac{-\left(c_{\theta} / J+\omega_{b}\right) \sin \omega t+\left[\omega-\left(c_{\theta} / J\right) \omega_{b} / \omega\right] \cos \omega t}{\left[\omega^{2}+\left(c_{\theta} / J\right)^{2}\right]\left(\omega^{2}+\omega_{b}^{2}\right)} \nonumber \] El segundo término del lado derecho anterior es claramente un término de frecuencia-respuesta; pero aún no se expresa en la forma a partir de la cual se pueden escribir ecuaciones para relación de magnitud y ángulo de fase, por lo que es necesario convertirlo en esa forma. Utilizar la identidad trigonométrica general\(\sin \theta \times \cos \phi+\cos \theta \times \sin \phi=\sin (\theta+\phi)\), y seguir el procedimiento descrito en las Ecuaciones 4.3.2-4.3.5, para mostrar que\(C \sin \omega t+S \cos \omega t=\sqrt{C^{2}+S^{2}} \sin (\omega t+\phi)\), dónde\(\phi = \tan ^{-1}(S / C)\). Utilice este resultado para escribir ecuaciones explícitas, en términos de\(c_{\theta} / J\) y\(\omega_b\) y\(\omega\), para relación de magnitud\(M R(\omega)\) y ángulo de fase\(\phi(\omega)\). En el resto de este problema, no vuelvas a escribir esas ecuaciones un tanto largas; en cambio, solo usa los símbolos\(M R(\omega)\) y\(\phi(\omega)\).
Utilice nuevamente la Ecuación 17.1.2 y el comando ilaplace de MATLAB para resolver el voltaje de salida\(e_{\text {out } 2}(t)\) en respuesta a\(e_{i n 2}(t)=E_{o f f} H(t)\).
Combine las ecuaciones de respuesta de las partes (a) y (b) para escribir la solución completa\(e_{\text {out}}(t)=e_{\text {out} 1}(t)+e_{\text {out} 2}(t)\), la respuesta de “estado estacionario” Ecuación 17.3.2:\[e_{o u t}(t)=E_{i n}\left(M R(\omega) \times \sin (\omega t+\phi(\omega))+\frac{\Lambda}{\omega\left(c_{\theta} / J\right)}\right)+E_{o f f} \frac{\Lambda J}{c_{\theta}}\left[t-\frac{\left(c_{\theta} / J+\omega_{b}\right)}{\left(c_{\theta} / J\right) \omega_{b}}\right] \nonumber \]