
1.3: El Sistema de Amortiguador de Masa I - ejemplo de sistema lineal, invariable en el tiempo (LTI) de primer orden y ecuación diferencial ordinaria (ODE)
- Page ID
- 84646

Considere un cuerpo rígido de masa\(m\) que está restringido a la traslación deslizante\(x(t)\) en una sola dirección, Figura\(\PageIndex{1}\). La masa se somete a una fuerza arbitraria aplicada externamente\(f_x(t)\), y puede deslizarse sobre una fina capa líquida viscosa como agua o aceite. La fuerza viscosa que actúa sobre la masa debido al deslizamiento sobre la capa líquida es opuesta a la dirección de la velocidad\(v(t)\equiv\dot{x}(t)\), y asumimos que la magnitud de la fuerza viscosa es proporcional a la velocidad con constante de proporcionalidad\(c\), llamada constante de amortiguación viscosa. La masa\(m\) y la constante de amortiguación viscosa\(c\) son cantidades físicas positivas. Todas las fuerzas que actúan sobre la masa son como se muestra en el diagrama de cuerpo libre (FBD) de la Figura\(\PageIndex{1}\).
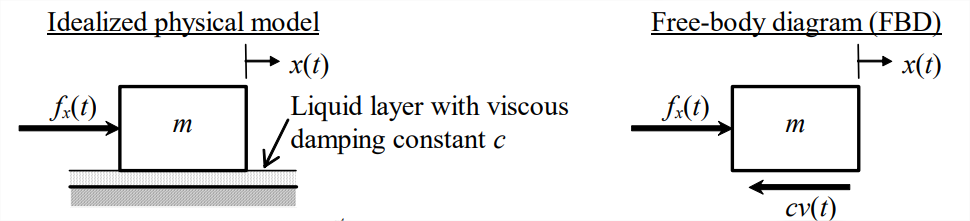
A continuación, utilizamos (de su curso de dinámica de ingeniería) el diagrama de cuerpo libre (FBD) de Figura\(\PageIndex{1}\) y la 2ª ley del movimiento de Newton (después del físico y matemático inglés Isaac Newton, 1642-1727) para la traducción en una sola dirección, para escribir la ecuación de movimiento para la masa:
\[\sum(\text { Forces })_{x}=\text { mass } \times(\text { acceleration })_{x} \nonumber \]
donde
\[(acceleration)_{x}=\frac{d v}{d t}=\dot{v} \nonumber \]
\[f_{x}(t)-c v=m \dot{v}. \nonumber \]
Como es habitual al escribir ODEs, recogemos todos los términos que involucran a la variable dependiente y sus derivadas en el lado izquierdo, y colocamos todas las funciones de entrada independientes en el lado derecho:
\[m \dot{v}+c v=f_{x}(t)\label{eqn:1.2} \]
\(\ref{eqn:1.2}\)La ecuación ODE es claramente lineal en la variable dependiente única\(v(t)\), velocidad e invariante de tiempo, asumiendo que\(m\) y\(c\) son constantes. La derivada más alta de\(v(t)\) en la ODE es la primera derivada, por lo que esta se denomina ODE de primer orden, y el sistema amortiguador de masa se denomina sistema de primer orden. Si\(f_x(t)\) se define explícitamente, y si también conocemos alguna condición inicial (IC) de la velocidad,\( v_0\equiv v(t_0) \) en el tiempo\(t\) =\(t_0\), entonces podemos, al menos en principio, resolver Ecuación ODE\(\ref{eqn:1.2}\) para velocidad\(v(t)\) en todo momento\(t\) >\(t_0\). (En este libro, generalmente definiremos el tiempo inicial como\(t_0\) = 0 segundos).
Ecuación\(\ref{eqn:1.2}\) expresada en la forma del estándar de 1 st orden LTI ODE Ecuación 1.2.1 se convierte\(\dot{v} -av=bf_x(t)\), donde\(a=-c/m\) y\(b=1/m\). Dado que\(m\) y\(c\) son constantes físicas positivas,\(a\) es claramente negativo. Esta polaridad negativa es característica de la mayoría de los sistemas físicos que estudiaremos; veremos que tiene una influencia importante en la naturaleza general de la respuesta transitoria de los sistemas.
Tenga en cuenta que después de resolver por velocidad\(v(t)\), podemos resolver por integración directa otra ODE para posición\(x(t)\), siempre que sepamos la posición inicial\(x_0\equiv x(t_0)\) en el tiempo\(t\) =\(t_0\). Un método sistemático para encontrar\(x(t)\) se basa en la definición derivada:
\[\text { ODE: } \quad \dot{x}(t) \equiv \frac{d x(t)}{d t}=v(t) \nonumber \]
A continuación se muestra una cuidadosa integración definida de ambos lados de la ODE, utilizando\(\tau\) como la variable “ficticio” de integración para distinguirla del límite superior, tiempo\(t\):
\ [\ begin {ecuación}\ begin {alineado}
\ int_ {t=1} ^ {t=t}\ frac {d x (\ tau)} {d\ tau} d\ tau &=\ int_ {t=t_ {0}} ^ {\ tenso=t} v (\ tau) d\ tau\ quad\ fila derecha\ quad x (t) -x\ izquierda (t_ {0}\ derecha) =\ int_ {\ tau=t_ {0}} ^ {\ tenso=t} v (\ tau) d\ tau\\
&\ Rightarrow\ quad x (t) =x_ {0} +\ int_ {\ tau=t_ {0}} ^ {t=t} v (\ tau) d\ tau
\ final {alineado}\ etiqueta {eqn:1.3}\ final {ecuación}\]
Otro método popular de solución es encontrar la antiderivada (integral indefinida) de la ODE y agregar una constante de integración\(C\), que luego debe determinarse en términos de la condición inicial:
\ [\ begin {align}
x (t) =\ int v (t) d t+C &\ Derechax\ izquierda (t_ {0}\ derecha) =\ izquierda [\ int v (t) d t\ derecha] _ {t=t_ {0}} +C\ Rightarrow C=x_ {0} -\ izquierda [\ int v (t) d t\ derecha] _ t-t_ {0}}\\
&\ Derecha x (t) =x_ {0} +\ int v (t) d t-\ izquierda [\ int v (t) d t\ derecha] _ {t-t_ {0}}
\ end {align}\ label {eqn:1.4}\]