
3.6: Muelle Traslacional y Amortiguador Viscoso (Dashpot)
- Page ID
- 84691

El resorte de traslación lineal se introdujo en la Sección 1.9 como el elemento mecánico que conecta una masa a una pared rígida; para ese simple caso, el extremo del resorte unido a la pared era estacionario. Ahora, consideremos el caso más general en el que ambos extremos del resorte pueden moverse, como se indica en la Figura\(\PageIndex{1}\). La fuerza\(f_{x}(t)\) requerida para deformar el resorte por la cantidad\(x_{b}(t)-x_{a}(t)\), relativa a la longitud no deformada del resorte, es proporcional a la deformación. Con la constante de proporcionalidad denotada como\(k\), la ley primaveral más general es
\[f_{x}(t)=k\left[x_{b}(t)-x_{a}(t)\right]\label{eqn:3.18} \]
La convención de signo estándar define el estiramiento del resorte como positivo,\(x_{b}-x_{a}\) > 0, correspondiente a la fuerza de tracción\(f_{x}(t)>0\); en consecuencia, la compresión es negativa en la convención estándar. La ecuación acomoda\(\ref{eqn:3.18}\) claramente tanto la tensión como la compresión del resorte. Ocasionalmente, sin embargo, es conveniente definir la compresión como positiva, como se ilustra en el Ejemplo 3-4 en la siguiente sección.
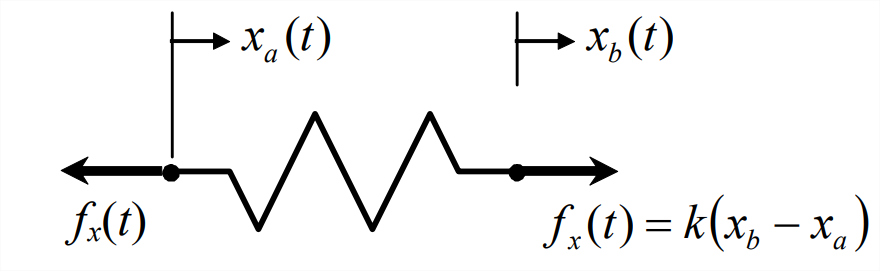
Con las fuerzas finales del resorte iguales y opuestas como se muestra en la Figura\(\PageIndex{1}\), hemos descuidado la fuerza inercial del resorte. Las fuerzas inerciales son términos como\(m \times a\), aceleración de masa por tiempos, en la 2ª ley de Newton. En este caso, la fuerza inercial del resorte es\(m_{s} \times \ddot{x}_{s}\), en la que\(m_s\) se encuentra la masa del resorte, y\(\ddot{x}_{s}\) es la aceleración del centro de masa del resorte. Así que descuidar las fuerzas inerciales significa que asumimos que son insignificantemente pequeñas en comparación con la fuerza de la Ecuación\(\ref{eqn:3.18}\). Observe que esto no significa estrictamente que estemos descuidando la masa, porque incluso una masa diminuta, cuando se multiplica por una gran aceleración, puede producir una fuerza inercial no despreciable. Es común descuidar las fuerzas inerciales de los resortes, pero debemos recordar al hacerlo que realmente estamos asumiendo que tanto las inercias son pequeñas como las aceleraciones son suficientemente lentas.
Un amortiguador viscoso mecánico es un componente discreto que resiste la velocidad de traslación. Un amortiguador viscoso lineal idealizado está representado gráficamente por un conjunto pistón-cilindro, Figura\(\PageIndex{1}\). Este dispositivo se opone a la velocidad relativa entre el pistón y el cilindro. Con las fuerzas sobre el amortiguador definidas como positivas en tensión, como se muestra en la Figura\(\PageIndex{1}\), la ley de amortiguación lineal es
\[f_{x}(t)=c\left[\dot{x}_{c}(t)-\dot{x}_{p}(t)\right]\label{eqn:3.19} \]
en la que\(c\) se encuentra la constante de amortiguación. La constante de amortiguación juega el mismo papel para un amortiguador aquí que juega en el Capítulo 1 [Figura 1.3.1 y Ecuación 1.3.4] para un bloque que se desliza sobre una película líquida viscosa. Si tuviéramos que definir las fuerzas para que fueran positivas en compresión, entonces tendríamos que revertir los signos en la ley de amortiguación, Ecuación\(\ref{eqn:3.19}\); a veces es apropiado hacerlo, como en el Ejemplo 3-4 en la siguiente sección.
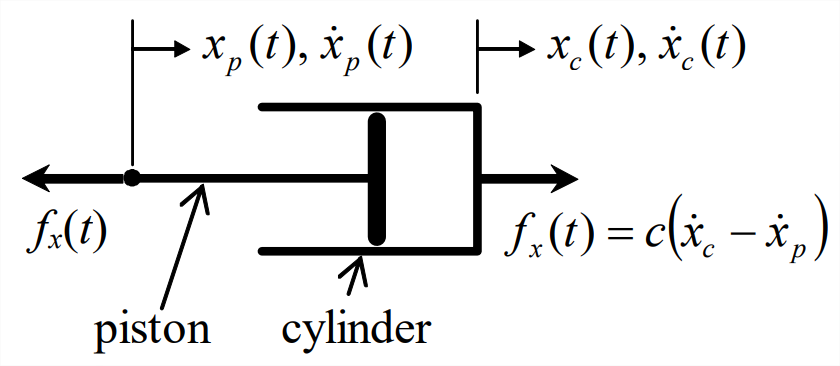
Con las fuerzas de cilindro y pistón iguales y opuestas como se muestra en la Figura\(\PageIndex{2}\), hemos descuidado las fuerzas inerciales del cilindro y el pistón. Es común descuidar las fuerzas inerciales de los dashpots, pero debemos recordar al hacerlo que realmente estamos asumiendo que tanto las inercias son pequeñas como las aceleraciones son suficientemente lentas. Por otro lado, en el Ejemplo 3-4 de la siguiente sección, no se descuidan las fuerzas inerciales de un conjunto pistón-cilindro.
El modelo idealizado de Dashpot de Figura\(\PageIndex{2}\) y Ecuación\(\ref{eqn:3.19}\) es conveniente para el análisis matemático lineal debido a su simplicidad. Se supone que resiste el movimiento entre el pistón y el cilindro por medio de la fuerza de arrastre producida por una capa límite de fluido viscoso entre los dos objetos sólidos. Podemos utilizar el amortiguador simple para modelar dispositivos aproximadamente reales como amortiguadores de puertas y amortiguadores. Sin embargo, no es un modelo preciso para la mayoría de los dispositivos de amortiguación reales. En la mayoría de los amortiguadores de traslación reales, un pistón fuerza el fluido a través de un orificio dentro de un cilindro, y esto genera una porción importante de la fuerza de resistencia. Desafortunadamente para fines de análisis matemático lineal, la fuerza de resistencia es una función compleja y altamente no lineal del movimiento relativo entre el pistón y el cilindro.