
4.2: Respuesta de un sistema de primer orden a un coseno aplicado repentinamente
- Page ID
- 84719

Primero, derivamos una solución completa de la manera convencional para el estándar original ODE de 1 er orden\(\dot{x}-a x=b u(t)\) [Ecuación 1.2.1], con IC\(x(0)=x_{0}\), y con la entrada coseno aplicada repentinamente (at\(t\) = 0)\(u(t)=U \cos \omega t\),\(t\) > 0, donde\(U\) es una amplitud constante [Problema 2.12.2].
Transformación Laplace de ODE + IC:\(s X(s)-x_{0}-a X(s)=\frac{b U}{2}\left(\frac{1}{s-j \omega}+\frac{1}{s+j \omega}\right)\)
Resolver para\(X(s)\):
\[X(s)=\frac{x_{0}}{s-a}+\frac{b U}{2} \frac{1}{(s-a)}\left(\frac{1}{s-j \omega}+\frac{1}{s+j \omega}\right) \nonumber \]
Expansión de fracción parcial completada (Problema 2.8):
\[X(s)=\frac{x_{0}}{s-a}+\frac{b U}{2} \frac{1}{a^{2}+\omega^{2}}\left(\frac{2 a}{s-a}+\frac{-a-j \omega}{s-j \omega}+\frac{-a+j \omega}{s+j \omega}\right) \nonumber \]
Transformación inversa:
A continuación, adaptamos la solución Ecuación\(\ref{eqn:4.2}\) del problema general de primer orden Ecuación\(\ref{eqn:4.1}\) al sistema amortiguador-resorte (puntal de choque ideal) de la Figura 3.7.1 con entrada de fuerza coseno aplicada repentinamente\(f_{x}(t)=F \cos \omega t\), para lo cual el problema comparable de ODE + IC es
Comparando Ecuación\(\ref{eqn:4.3}\) con Ecuación\(\ref{eqn:4.1}\), definimos\(U\)\(\equiv\)\(F\), luego las otras constantes de la ecuación estándar se convierten en
\[a=-\frac{k}{c} \equiv-\frac{1}{\tau_{1}} \Rightarrow \text { time constant } \tau_{1} \equiv \frac{1}{-a}=\frac{c}{k} \quad \text { and } \quad b=\frac{1}{c} \text { and } \frac{b}{-a}=\frac{1}{k} \nonumber \]
Es instructivo estudiar la naturaleza física de la ecuación de respuesta\(\ref{eqn:4.4}\) en el contexto de un ejemplo numérico específico. Considerar un puntal de choque ideal con la condición inicial\(x_0\) = -2 m, y con los parámetros del sistema\(c=1 / \pi\) N/ (m/s) = 0.3183 N-S/m y\(k\) = 1 N/m, de manera que la constante de tiempo\(\tau_{1}=1 / \pi\) s = 0.3183 s. Deje que la magnitud de la fuerza coseno sea\(F\) = 1.5 N, y deje que el periodo de el coseno sea\(T_p\) = 1 s/ciclo. Por lo tanto, la frecuencia cíclica es\(f\) = 1 Hz (ciclo/s), y la frecuencia circular es\(\omega = 2\pi\) radianes/s. (Periodo, frecuencia y fase de las señales periódicas se discuten de manera más general en la Sección 4.4.) La solución numérica de Ecuación\(\ref{eqn:4.4}\) con estos parámetros para el tiempo 0\(\leq\)\(t\)\(\leq\) 3 s se calcula y grafica en las siguientes operaciones de MATLAB.
Script de archivo M de MATLAB:
%Matlabdemo41.m
% amortiguador-resorte respuesta de puntal de choque ideal al forzamiento de coseno IC +
c=1/pi; k=1; %constantes viscosas de amortiguación y rigidez del sistema, unidades SI
F=1.5; Tp=1; %forzamiento coseno: amplitud (N), periodo (seg)
xo=-2; %desplazamiento inicial (m)
W=2*pi/tp;% de frecuencia circular de forzamiento de coseno (rad/seg)
t1=c/k; denom=1+ (w*t1) ^2;
t= 0:0. 01:3 *Tp;% instantes de tiempo para respuesta forzada
FX=F*cos (w*t);
x = (xo- (f/K) /denom) *exp (-t/t1) + (f/K) /denom* (cos (w*t) +w*t1*sin (w*t));
parcela (t, fx, 'k', t, x, 'k.') , grid, xlabel ('Tiempo t (seg) '),... ylabel ('Entrada de fuerza f_x (t) (N) y salida de desplazamiento x (t) (m)'),... title ('Respuesta de tiempo de un puntal de choque ideal a IC + entrada de coseno')
Comando/respuestas de MATLAB:
>> MatlabDemo41
El gráfico de entrada\(f_x(t)\) y respuesta\(x(t)\) se encuentra a continuación (después de la edición de figuras en MATLAB, Versión 6 o posterior, para aplanar la relación de aspecto y distinguir las dos curvas).
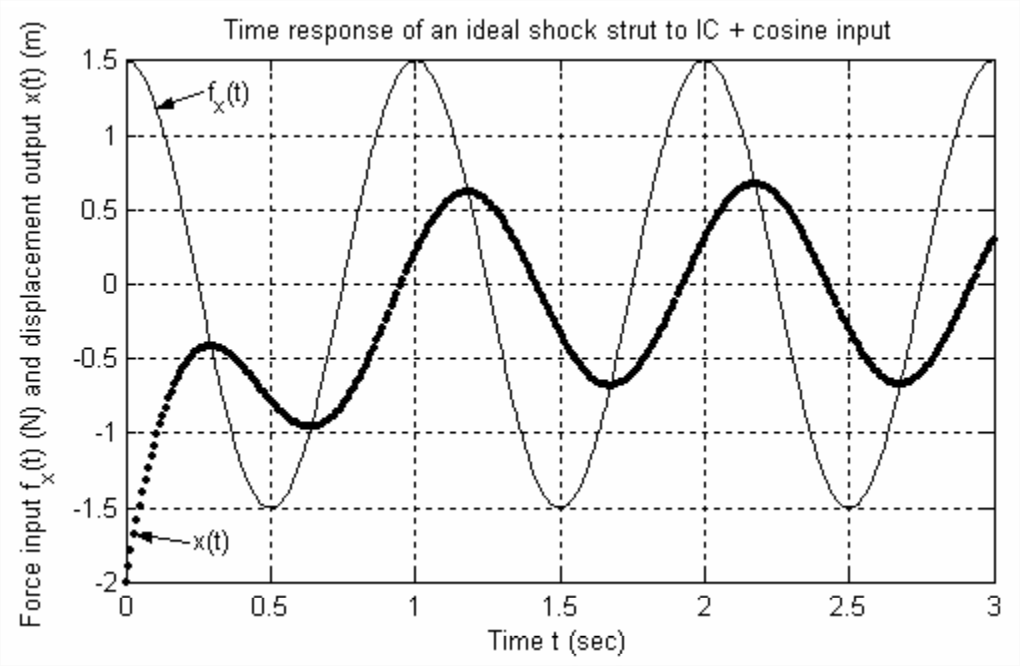
Observemos desde la gráfica algunas características importantes de la respuesta:
- Como se calculó anteriormente, la constante de tiempo de los términos de decaimiento exponencial en la Ecuación\(\ref{eqn:4.4}\) [los dos términos que implican\(\exp \left(-t / \tau_{1}\right)\)] es\(\tau_{1}\) = 0.3183 s, por lo que el tiempo de asentamiento para esos términos es\(4 \tau_{1}\) = 1.273 s. En otras palabras, los términos de decaimiento exponencial en esencialmente\(x(t)\) han desaparecido después de alrededor de 1.3 s de respuesta, y esto queda claro a partir de la gráfica. Debido a que los términos de decaimiento exponencial son relativamente efímeros, a menudo nos referimos a ellos como la parte “transitoria” de la solución total.
- Después de que los términos de decaimiento exponencial hayan desaparecido, solo\(\ref{eqn:4.4}\) quedan los\(\sin \omega t\) términos\(\cos \omega t\) y de Ecuación. De la gráfica se desprende que esos dos términos se combinan para hacer una sola sinusoide a frecuencia \(\omega\), y que la\(x(t)\) sinusoide de estado estacionario restante se desplaza en el tiempo por un retardo de tiempo constante desde la\(F_x(t)\) sinusoide. Esta respuesta sinusoidal en estado estacionario es lo que llamamos la respuesta de frecuencia, y derivaremos ecuaciones que la describen explícitamente en el resto del capítulo.