Considere un sistema amortiguador de masa con una función de forzamiento coseno aplicada repentinamente que comienza en\(t\) = 0, y deje que la masa tenga una velocidad inicial conocida. El problema completo para la velocidad\(v(t)\) es descrito por el primer orden, LTI ODE\(m \dot{v}+c v=F \cos \omega t\),\(t\) > 0, y el IC\(v(0)=v_{0}\). Utilice la solución general Ecuación 6.2.4 para escribir una ecuación algebraica para la solución completa\(v(t)\) de este problema. Será necesario evaluar la integral de convolución. Se puede utilizar la integración por partes y/o tablas publicadas de integrales, las cuales son muy recomendables. El software simbólico (Mathematica, MATLAB, etc.) también es una fuente potencial de asistencia con integrales difíciles. \[\text {Answer: } v(t)=\left[v_{0}-\frac{F}{c} \frac{1}{1+\left(\omega \tau_{1}\right)^{2}}\right] e^{-t / \tau_{1}}+\frac{F}{c} \frac{1}{1+\left(\omega \tau_{1}\right)^{2}}\left(\cos \omega t+\omega \tau_{1} \sin \omega t\right), t \geq 0 \nonumber \]
Considere la ODE LTI estándar de primer orden (de un sistema físico estable) para la variable dependiente\(x(t): \quad \dot{x}+\left(1 / \tau_{1}\right) x=b u(t)\), con IC\(x(0)\) = 0. Deje que la función de entrada sea el siguiente pulso plano de duración\(t_d\):\ [u (t) =\ left\ {\ begin {array} {ll}
0, & t<0\\
U, & 0<t<t<t_ {d},\ text {en el que amplitud} U\ text {es constante}\\
0, & t_ {d} <t
\ end {array}\ derecho. \ nonumber\]
Utilice las soluciones Ecuaciones 6.3.2 y 6.3.3 para escribir dos ecuaciones algebraicas para\(x(t)\) la respuesta completa a este problema. Una ecuación debe aplicarse para el tiempo durante el cual el pulso está activo (incluyendo los tiempos inicial y final)\(0 \leq t \leq t_{d}\), y la otra ecuación debe aplicarse para el tiempo posterior al cese del pulso,\(t_{d} \leq t\). Será necesario evaluar la integral de convolución. \ [\ text {Respuesta:} x (t) =\ left\ {\ begin {array} {l}
b U\ tau_ {1}\ left (1-e^ {-t/\ tau_ {1}}\ right),\ quad 0\ leq t\ leq t_ {d}\\
b U\ tau_ {1}\ left (e^ {-\ left (t-t_ d {}\ derecha)/\ tau_ {1}} -e^ {-t/\ tau_ {1}}\ derecha),\ cuádruple t_ {d}\ leq t
\ end {array}\ derecho. \ nonumber\] Tenga en cuenta que el resultado para se\(t_{d} \leq t\) puede escribir también como\[x(t)=b U \tau_{1}\left(1-e^{-t_{d} / \tau_{1}}\right) e^{-\left(t-t_{d}\right) / \tau_{1}}, \quad t_{d} \leq t \nonumber \]
Supongamos que\(t_{d}=\tau_{1}\). Esboce a mano (no por computadora) una gráfica de historial de tiempo razonablemente precisa de la salida no dimensionalizada\(\frac{x(t)}{b U \tau_{1}}\) versus el tiempo durante el intervalo de tiempo\(0 \leq t \leq 5 \tau_{1}\).
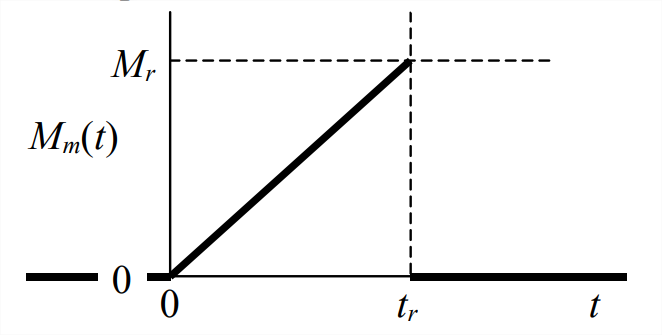
Considere la ecuación de movimiento para la velocidad\(p(t)\) de giro de una rueda de reacción (del Ejemplo 6.3 en la Sección 6.3):\(\dot{p}+\left(c_{\theta} / J\right) p=(1 / J) M_{m}(t)\), con IC\(p(0)=0\). Deje que el par motor aplicado sea el siguiente pulso de diente de sierra:\ [M_ {m} (t) =\ left\ {\ begin {array} {cc}
0, & t<0
\\\ frac {M_ {r}} {t_ {r}} t, & 0\ leq t<t_ {r}\
0, & t_ {r} <t
\ end {array}\ right. \ nonumber\]
Figura\(\PageIndex{1}\)
Utilice las soluciones Ecuaciones 6.3.2 y 6.3.3 para escribir dos ecuaciones algebraicas para la solución completa\(p(t)\) de este problema. Una ecuación debe aplicarse para el tiempo durante el cual el pulso está activo (incluyendo los tiempos inicial y final)\(0 \leq t \leq t_{r}\), y la otra ecuación debe aplicarse para el tiempo posterior al cese del pulso,\(t_{r} \leq t\). Puede y debe utilizar sin re-derivación los resultados apropiados del Ejemplo 6.3 en la Sección 6.3, en el que el momento aplicado es una rampa permanentemente creciente.
Utilice MatlabDemo61.m en la Sección 6.5 como plantilla (que debe revisarse y complementarse con etiquetas, rejillas, etc.) para calcular aproximadamente y graficar la respuesta de velocidad del mismo sistema de amortiguadores de masa con el mismo IC, pero ahora especificando menor (que en la Sección 6.5) pasos de tiempo de cálculo:\(\Delta t\) = 0.5 s y\(\Delta t\) = 0.25 s. Debe encontrar que la respuesta dinámica calculada se vuelve progresivamente más precisa a medida que reduce\(\Delta t\).
Derive una fórmula de recurrencia más precisa que la Ecuación 6.5.5 aproximando\(u(\tau)\) como variando linealmente con el tiempo en cada paso de tiempo. En otras palabras, utilice en la Ecuación 6.5.1 la aproximación lineal\[u(\tau) \approx u_{n-1}+\frac{\tau-t_{n-1}}{\Delta t}\left(u_{n}-u_{n-1}\right) \text { for } t_{n-1} \leq \tau \leq t_{n} \nonumber \] en lugar de la aproximación más simple Ecuación 6.5.2. Al completar la integración, mostrar (con todo detalle, como si no se diera la respuesta) que la versión refinada de la Ecuación 6.5.5 está\[x_{n}=\phi x_{n-1}+\gamma u_{n-1}+\beta\left(u_{n}-u_{n-1}\right) \nonumber \] en la que\(\phi\) y\(\gamma\) son las constantes definidas en la Ecuación 6.5.5, y\(\beta \equiv \frac{\gamma}{a \Delta t}-\frac{b}{a}\).
Revisar el archivo M MatlabDEMO61.m de la Sección 6.5 para implementar la fórmula de recurrencia refinada de la parte 6.5.1. Usando exactamente los mismos datos numéricos que en el programa original, ejecute el programa revisado y grafique el historial de tiempo aproximado\(v(t)\). El historial de tiempo aproximado calculado por la fórmula de recurrencia refinada debe ser sustancialmente más preciso que el calculado por la Ecuación 6.5.5.
Considere el LTI-ODE estándar de primer orden de un sistema estable, Ecuación 3.4.8, para la variable dependiente\(x(t): \quad \dot{x}+\left(1 / \tau_{1}\right) x=b u(t)\). Dejar que la condición inicial sea cero,\(x(0)=0\), y dejar que la función de entrada sea una rampa decreciente\(u(t)=c\left(t_{z}-t\right)\),\(c\), en la que, una constante dimensional, es la pendiente descendente de la rampa, y\(t_z\) es el tiempo en el que la entrada pasa por cero.
Evaluar con todo detalle la integral de convolución en la Ecuación 6.2.4 para mostrar que la solución de respuesta exacta es\(x(t)=b c \tau_{1}\left[\left(t_{z}+\tau_{1}\right)\left(1-e^{-t / \tau_{1}}\right)-t\right]=b c \tau_{1}\left[t_{z}+\tau_{1}-t-\left(t_{z}+\tau_{1}\right) e^{-t / \tau_{1}}\right]\).
Deje que los parámetros numéricos sean\(\tau_1\) = 2.5 s,\(t_z\) = 10 s,\(b\) = 3.5, y\(c\) = 1 (\(b\)y\(c\) en unidades consistentes). Escriba un programa MATLAB, o adapte el código en la Sección 6.5 que ejecuta la fórmula de recurrencia, para calcular y trazar una solución numérica aproximada\(x(t)\) durante el intervalo de tiempo\(0 \leq t \leq 10\) s. Ajuste el tamaño de paso de tiempo\(\Delta\) y el número de pasos de tiempo en el intervalo de 10-s en su código hasta la gráfica de su solución aproximada aparece muy similar a la de la solución exacta correspondiente de la parte 6.6.1. Envíe su código de MATLAB y su gráfica final de respuesta.