7.3: Respuesta de CI simple y respuesta escalonada de sistemas de segundo orden sin amortiguar
- Page ID
- 84669

Encontramos en esta sección dos importantes soluciones de casos especiales de las Ecuaciones 7.2.4 y 7.2.5:
- respuesta de condición inicial pura para entrada cero,\(u(t) = 0\) y
- respuesta pura de paso con ambas condiciones iniciales siendo cero.
Para el caso de la respuesta de condición inicial pura (también llamada vibración libre), con\(u(t) = 0\), las ecuaciones 7.2.4 y 7.2.5 se convierten en
Usemos una identidad trigonométrica [ver Ecuaciones 4.3.2, 4.3.4 y 4.3.5] para combinar las dos sinusoides de Ecuaciones\(\ref{eqn:7.10}\) en un solo término. La siguiente definición reducirá la escritura requerida y además resultará ser físicamente significativa:
\[x_{\max } \equiv \sqrt{x_{0}^{2}+\left(\dot{x}_{0} / \omega_{n}\right)^{2}}\label{eqn:7.11} \]
\[\Rightarrow \quad x(t)=x_{\max }\left[\cos \omega_{n} t \times\left(\frac{x_{0}}{x_{\max }}\right)-\sin \omega_{n} t \times\left(\frac{-\dot{x}_{0} / \omega_{n}}{x_{\max }}\right)\right] \nonumber \]
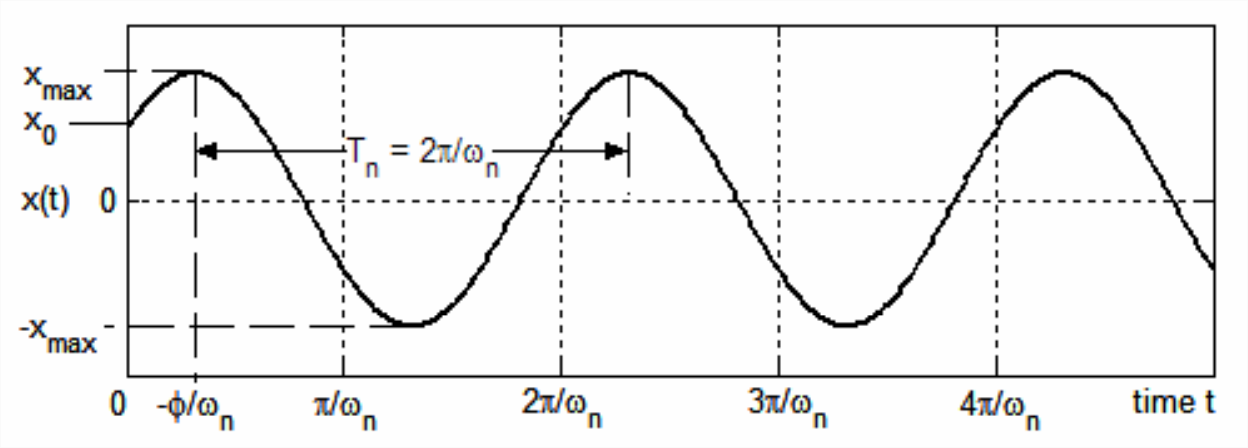
La Figura\(\PageIndex{1}\) es una gráfica anotada de la Ecuación de respuesta\(\ref{eqn:7.11}\) -Ecuación\(\ref{eqn:7.12}\) para los valores positivos de los CI,\(x_{0}>0\) y\(\dot{x}_{0}>0\). Claramente, la salida es una sinusoide pura de amplitud\(x_{\max }\) y ángulo de fase\(\phi\). Esta forma de respuesta se llama vibración libre, porque ocurre sin ninguna entrada forzada,\(u(t)\) = 0. La frecuencia circular de vibración es\(\omega_n\) rad/s, la frecuencia natural definida en la Ecuación 7.1.3. La frecuencia natural cíclica es\(f_{n}=\omega_{n} / 2 \pi\) ciclo/s (Hz), y el periodo natural anotado en la Figura\(\PageIndex{1}\) es\(T_{n}=1 / f_{n}=2 \pi / \omega_{n}\) s/ciclo. La vibración libre a la frecuencia natural es una de las características más importantes de los sistemas sin amortiguar y, de manera más realista, de los sistemas ligeramente amortiguados. Los sistemas amortiguados de segundo orden se discuten en el Capítulo 9.
Para el caso de respuesta de paso puro, establecemos los CI en cero, y definimos la entrada para que sea una función de paso en el tiempo\(t\) = 0, con magnitud de paso\(U\):
\[u(t)=U H(t)\label{eqn:7.13} \]
La forma apropiada de la solución general a utilizar en este caso es la Ecuación 7.2.4,
\[x(t)=\omega_{n} \int_{\tau=0}^{\tau=t} \sin \omega_{n} \tau \times u(t-\tau) d \tau=\omega_{n} \int_{\tau=0}^{\tau=t} \sin \omega_{n} \tau \times U H(t-\tau) d \tau=\omega_{n} U \int_{\tau=0}^{\tau=t} \sin \omega_{n} \tau d \tau \nonumber \]
Aquí se utilizó la propiedad de la función unidad-paso que\(H(t-\tau)=1\) para\(t-\tau>0\) (de la Ecuación 2.4.2 y Figura 2.4.2); esta desigualdad obviamente se satisface por\(\tau\) encima de los límites de la integral definida. Para la mayoría de las aplicaciones de las integrales de convolución en las Ecuaciones 7.2.4 y 7.2.5, la forma en la Ecuación 7.2.5 es preferible porque el término integral\(u(t-\tau)\) en la Ecuación 7.2.4 suele ser difícil de interpretar y/o incómodo de manejar en la integración. Este caso, sin embargo, es una excepción ya que\(u(t-\tau)\) es fácil de interpretar y es extremadamente simple. Completar la integración da
\[x(t)=\omega_{n} U \int_{t=0}^{r=t} \sin \omega_{n} \tau d \tau=\omega_{n} U \int_{t=0}^{r=t}\left(\frac{-1}{\omega_{n}}\right) d\left(\cos \omega_{n} \tau\right)=-U\left[\cos \omega_{n} \tau\right]_{0}=-U\left(\cos \omega_{n} t-1\right) \nonumber \]
\[\Rightarrow \quad x(t)=U\left(1-\cos \omega_{n} t\right), 0 \leq t\label{eqn:7.14} \]
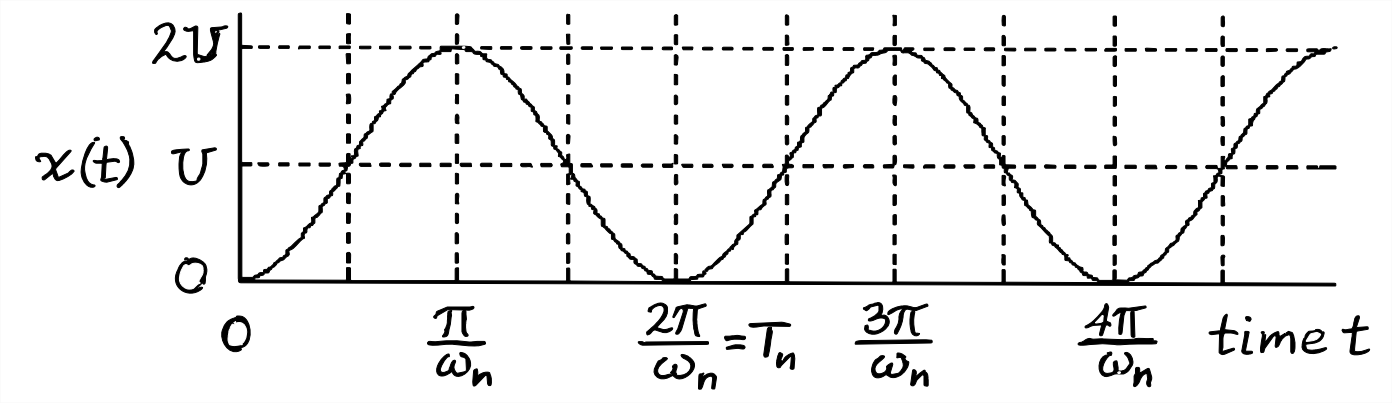
\(\ref{eqn:7.14}\)La ecuación se grafica para algunos ciclos de respuesta en la Figura\(\PageIndex{2}\). La respuesta es sinusoidal y periódica con el periodo natural del sistema\(T_{n}\), al igual que la respuesta IC de vibración libre. Sin embargo, Ecuación\(\ref{eqn:7.14}\) es respuesta forzada, y la entrada no\(u(t)\) es cero y constante para\(t > 0\), por lo que esta respuesta escalonada vibra alrededor de un valor medio distinto de cero (el valor de salida pseudo-estático\(x_{p s}=U\)), oscilando entre 0 y 2\(U\). En contraste, la respuesta IC de vibración libre de Ecuación\(\ref{eqn:7.12}\) y Figura\(\PageIndex{1}\) vibra alrededor del valor medio cero, oscilando entre\(-x_{\max }\) y\(+x_{\max }\).