8.7: Respuesta de impulso ideal de un sistema de segundo orden sin amortiguar
- Page ID
- 84548

El ODE para un sistema estándar de orden 2 nd no amortiguado es\(\ddot{x}+\omega_{n}^{2} x=\omega_{n}^{2} u(t)\). Deje que la función de entrada sea el impulso ideal\(u(t)=I_{U} \delta(t)\),, y que las condiciones iniciales previas al impulso sean\(x\left(0^{-}\right) \equiv x_{0}\),\(\dot{x}\left(0^{-}\right) \equiv \dot{x}_{0}\). Al igual que para el sistema de primer orden con excitación ideal-impulso en la Sección 8.5, resolveremos el problema actual mediante el enfoque convencional de transformación Laplace. Tenga en cuenta que usaremos la segunda forma derivada de la Ecuación 8.6.4:\(L[\ddot{f}]=s^{2} F(s)-s f\left(0^{-}\right)-\dot{f}\left(0^{-}\right)\). Con\(L[\delta(t)]=1\) la ecuación 8.4.6, los pasos de la solución son:
\[L[\mathrm{ODE}]: \quad s^{2} X(s)-s x_{0}-\dot{x}_{0}+\omega_{n}^{2} X(s)=b U(s)=\omega_{n}^{2} I_{U} \times 1 \nonumber \]
A riesgo de ser excesivamente repetitivo, enfatizamos que las discusiones en las Secciones 8.5 y 8.6 muestran que la Ecuación de respuesta\(\ref{eqn:8.26}\) es la solución post-impulso, ciertamente válida matemáticamente para\(t \geq 0^{+}\), pero no necesariamente correcta, en particular, para la inicial pre-impulso condiciones en\(t=0^-\).
La ecuación de solución se\(\ref{eqn:8.26}\) mantiene para un sistema general no amortiguado de segundo orden; adaptémoslo específicamente a un sistema masa-resorte, con cero condiciones iniciales, que es golpeado por un impulso ideal de fuerza que tiene magnitud\(I_{F}\), con unidades, por ejemplo, de N-s o lb-s. De la Ecuación 7.1.4, encontramos
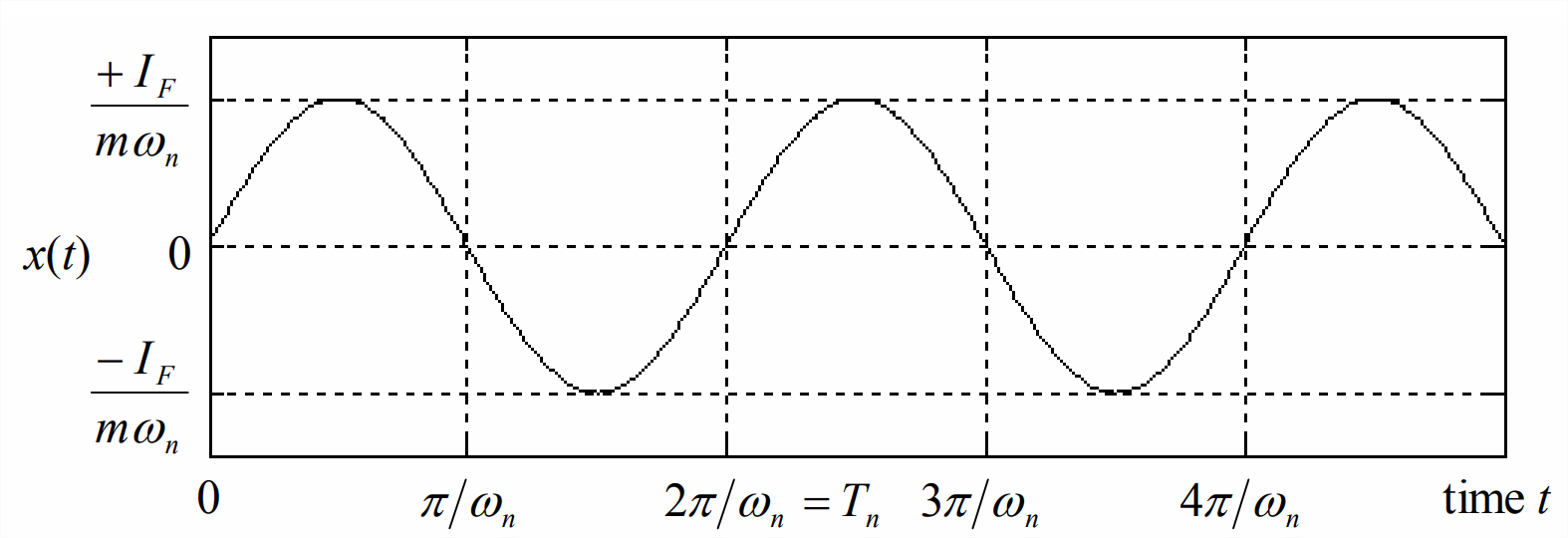
Entonces, para el movimiento traslacional\(x(t)\) de la masa, Ecuación\(\ref{eqn:8.26}\) con cero condiciones iniciales se convierte en (recordar\(k=m \omega_{n}^{2}\))
La figura\(\PageIndex{1}\) muestra algunos ciclos de ecuación de respuesta\(\ref{eqn:8.28}\).