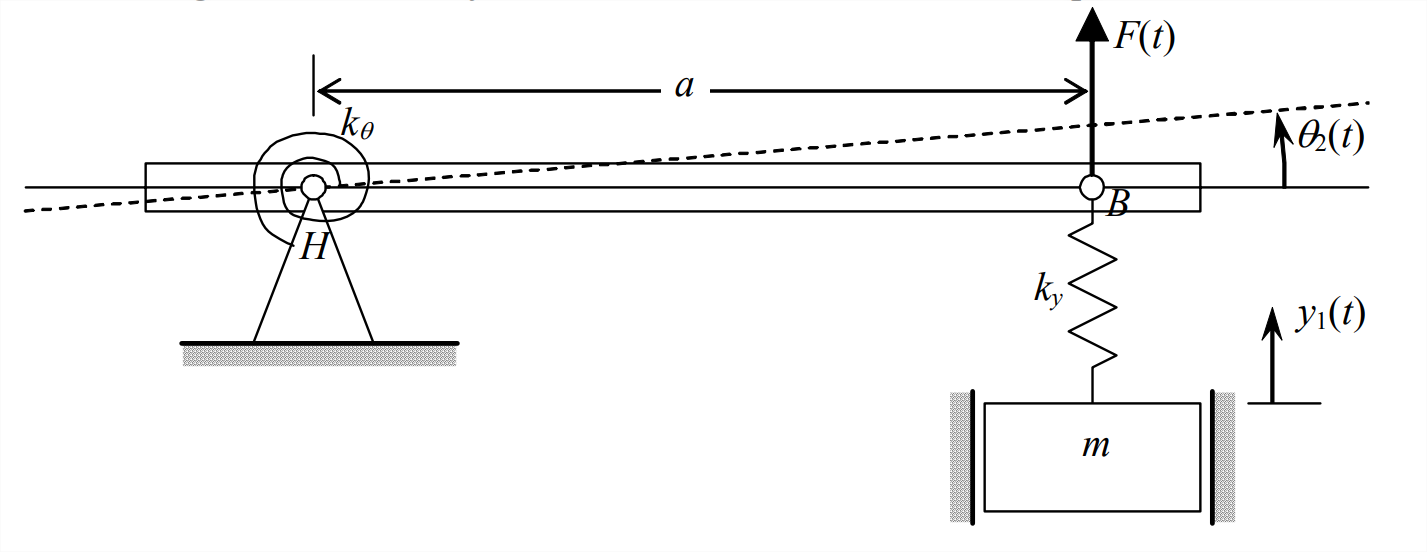
Consideremos nuevamente el sistema 2-DOF de tarea Problema 11.2, representado a continuación.
Figura\(\PageIndex{1}\)
Las dos ecuaciones diferenciales acopladas de movimiento para este sistema, derivadas para la tarea Problema 11.2 y ahora expresadas en forma de matriz, son\ [\ left [\ begin {array} {cc}
m & 0\\
0 & J_ {H}
\ end {array}\ right]\ left [\ begin {array} {c}
\ ddot {y} _ {1}\
\ ddot {\ theta} _ {2}
\ end {array}\ derecha] +\ izquierda [\ begin {array} {cc}
k_ {y} & -a k_ {y}\\
-a k_ {y} & k_ {\ theta} +a^ {2} k_ {y}
\ end {array}\ derecha]\ izquierda [\ comenzar {matriz} {c}
y_ {1}\\
\ theta_ {2}
\ end {array}\ right] =\ left [\ begin {array} {c}
0\\
a F (t)
\ end {array}\ right]\ nonumber\] Todos los parámetros en estas ecuaciones se definen en la figura excepto\(J_H\), que es la inercia rotacional de la barra sobre la bisagra sin fricción\(H\). Considere el problema de vibración libre, con\(F(t)=0\). Primero, mostrar que la ecuación característica en general es\[m J_{H}\left(\omega^{2}\right)^{2}+\left[-m\left(k_{\theta}+a^{2} k_{y}\right)-J_{H} k_{y}\right] \omega^{2}+k_{y} k_{\theta}=0 \nonumber \] Ahora, considere la siguiente situación. Supongamos que usted es un ingeniero de diseño que trabaja en un nuevo proyecto satelital para una compañía aeroespacial. Ha diseñado un paquete de sensores que incluye un pequeño dispositivo mecánico en forma del sistema 2-DOF sujeto. El satélite ha sido fabricado, y ahora está siendo sometido a pruebas funcionales en tierra. El actuador primario de control de actitud para el satélite es un giroscopio de momento de control (CMG), cuyo rotor gira a 11,400 rpm en funcionamiento normal. El tiempo de spin-up para este CMG es de aproximadamente cuatro horas. Durante la primera prueba funcional, al final del spin-up de CMG, los ingenieros de pruebas observan un corto período de zumbidos fuertes provenientes de las proximidades de su paquete de sensores. El zumbido se detiene repentinamente, y nadie piensa nada más al respecto hasta que comiencen las pruebas funcionales en tu sensor. Desafortunadamente, las lecturas de tu sensor son galimatías. El paquete de sensores se retira y se abre, y el examen muestra que el dispositivo 2-DOF está completamente destruido: ambos resortes están fracturados, la barra está muy doblada, la masa se separa y la barra y la masa han golpeado contra placas de circuito cercanas dentro del paquete. Ahora es su responsabilidad determinar qué salió mal. Un ingeniero de pruebas experimentado especula que el dispositivo 2-DOF podría haber resonado debido a la excitación de la base causada por el CMG. Aunque los rotores de los CMG calificados para el espacio siempre están cuidadosamente equilibrados, es imposible eliminar todo desequilibrio. En consecuencia, el desequilibrio rotor-espín impone pequeñas fuerzas periódicas a la velocidad de giro sobre los soportes CMG, y estas fuerzas producen vibraciones que se transmiten en ondas a lo largo de la estructura de la nave espacial. Con la ayuda de técnicos de calibración, usted determina que los parámetros numéricos del dispositivo 2-DOF son:\(m\) = 19.2 g = 0.0192 kg,\(J_{H}\) = 37.3e−6 kg-m 2,\(k_{y}\) = 16.9 N/mm = 16.9 kN/m,\(k_{\theta}\) = 12.8 N-m/Rad, y\(a\) = 30.0 mm = 0.0300 m. Calcular los modos de vibración de este sistema (frecuencias naturales, formas de modo y bocetos de las formas de modo), y discutir en unas pocas frases la causa probable de la falla estructural dentro de su paquete de sensores satelitales.
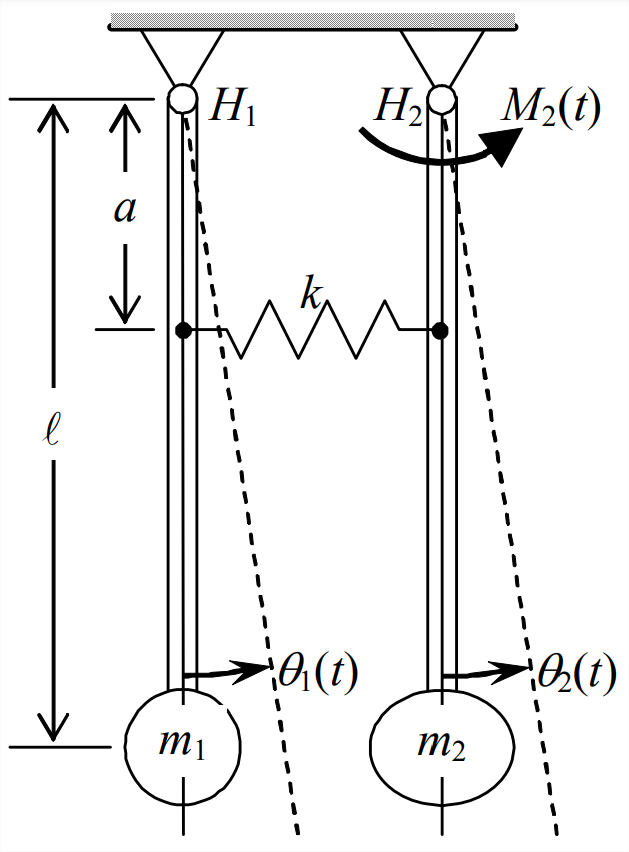
Consideremos nuevamente el sistema de péndulo-resorte de 2-DOF de la tarea Problema 11.5, representado a continuación. Las dos ecuaciones diferenciales acopladas de movimiento para este sistema, derivadas para la tarea Problema 11.5 y ahora expresadas en forma de matriz, son\ [\ left [\ begin {array} {cc}
m_ {1}\ ell^ {2} & 0\\
0 & m_ {2}\ ell^ {2}
\ end {array}\ right]\ left [\ begin {array} {c}
\ ddot {\ theta} _ {1}\
\ ddot {\ theta} _ {2}
\ end {array}\ derecha] +\ izquierda [\ begin {array} {cc}
m_ {1} g\ ell+k a^ {2} & -k a^ {2}\\
-k a^ {2} & m_ {2} g\ ell+k a^ {2}
\ end {array}\ derecha]\ izquierda [\ begin {array} {c}
\ theta_ {1}\
\ theta_ {2}
\ end {array}\ right] =\ left [\ begin {array} {c}
0\\
M_ {2} (t)
\ end {array}\ right]\ nonumber\] Considere el problema de vibración libre, con\(M_{2}(t)=0\). Simplificará la escritura si, inicialmente, utilizará las siguientes abreviaturas notacionales:\(J_{1}=m_{1} \ell^{2}\),,\(J_{2}=m_{2} \ell^{2}\),\(k_{1}=m_{1} g \ell+k a^{2}\)\(k_{2}=m_{2} g \ell+k a^{2}\), y\(k_c=k a^{2}\) (el coeficiente de “acoplamiento”). Primero, mostrar que la ecuación característica en general es\[J_{1} J_{2}\left(\omega^{2}\right)^{2}+\left(-J_{2} k_{1}-J_{1} k_{2}\right) \omega^{2}+k_{1} k_{2}-k_{c}^{2}=0 \nonumber \] Ahora considere el caso especial con\(m_{1}=\frac{1}{2} m_{2}\) y\(k_c=k a^{2}=m_{2} g \ell\). Expresar todos los coeficientes de la ecuación característica en términos de\(m_2\),\(g\), y\(\ell\), y luego mostrar que esta ecuación cuadrática se puede poner en la forma\(\left(\omega^{2}\right)^{2}-5(g / \ell) \omega^{2}+4(g / \ell)^{2}=0\). Para este caso especial, resuelva las frecuencias naturales y las formas de modo, y dibuje las formas de modo.
Figura\(\PageIndex{2}\)
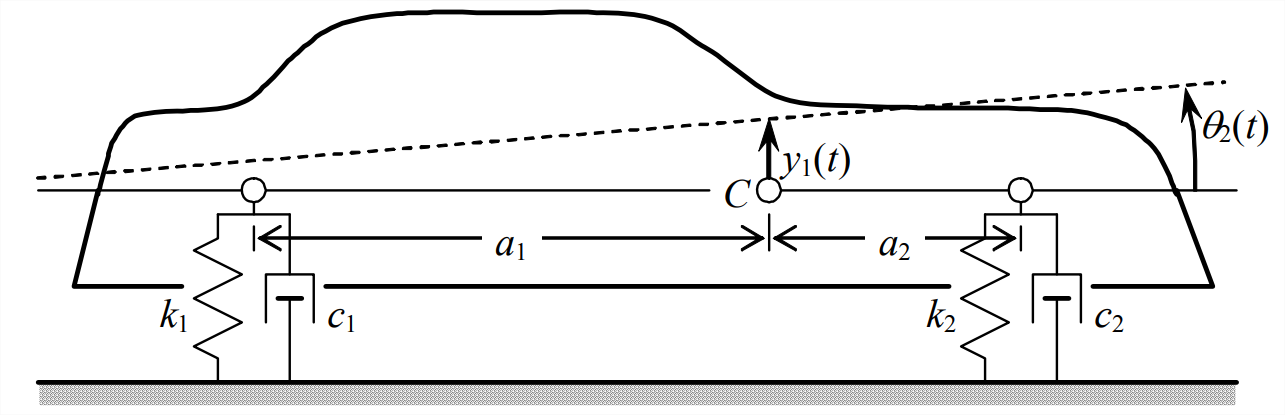
Considerar de nuevo desde la tarea Problema 11.6 el modelo simplificado para la dinámica de lanzamiento-traducción de un vehículo automotriz, representado a continuación. El bastidor rígido tiene masa\(m\) e inercia rotacional\(J_c\) alrededor del centro de masa\(C\).
Figura\(\PageIndex{3}\)
Las dos ecuaciones diferenciales acopladas de movimiento para este sistema, derivadas para la tarea Problema 11.6 y ahora expresadas en forma de matriz, son\ [\ left [\ begin {array} {cc}
m & 0\\
0 & J_ {C}
\ end {array}\ right]\ left [\ begin {array} {c}
\ ddot {y} _ {1}\
\ ddot {\ theta} _ {2}
\ end {array}\ derecha] +\ izquierda [\ begin {array} {cc}
c_ {1} +c_ {2} & c_ {2} a_ {2} a_ {2} -c_ {1}
a_ {1} a_ {1}\ c_ {2} a_ {1} & c_ {1} a_ {1} ^ {2} +c_ {2} a_ {2} ^ {2}
\ end {array}\ right]\ left [\ begin {array } {c}
\ punto {y} _ {1}\
\ punto {\ theta} _ {2}
\ end {array}\ derecha] +\ izquierda [\ begin {array} {c}
k_ {1} +k_ {2}\
k_ {2} a_ {2} a_ {2} -k_ {1} a_ {1}
\ end {array}\ quad\ begin {array} c}
k_ {2} a_ {2} -k_ {1} a_ { 1}\\
k_ {1} a_ {1} ^ {2} +k_ {2} a_ {2} ^ {2}
\ end {array}\ right]\ left [\ begin {array} {c}
y_ {1}
\\ theta_ {2}
\ end {array}\ right] =\ left [\ begin {array} {c}
0\
0
\ end array}\ right]\ nonumber\] Para obtener los modos de vibración del sistema no amortiguado, establecemos\(c_{1}=c_{2}=0\), que borra todo el segundo término de la ecuación matricial. Los siguientes datos son representativos para un sedán compacto de cuatro puertas:\(mg\) = 2,150 lb,\(J_cg\) = 5.47e6 lb-pulgada 2,\(k_{1}=k_{2}=\) 155 lb/pulgada,\(a_{1}=82.7\) pulgadas y\(a_{2}=35.4\) pulgadas. Calcule las frecuencias naturales, las formas de modo y las ubicaciones de los puntos nodales, y dibuje las formas de modo.
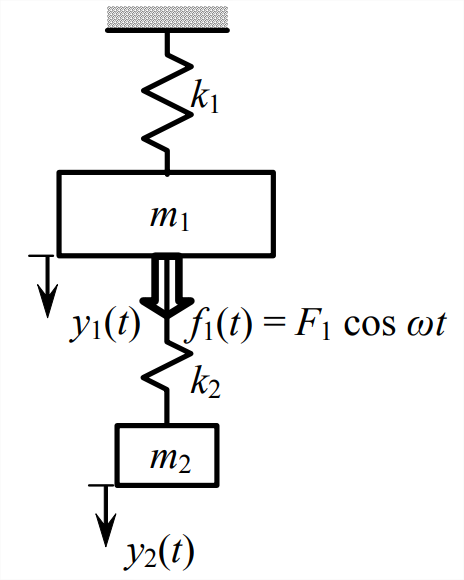
Consideremos nuevamente la Figura 12.2.1, pero ahora supongamos que todo el sistema masa-resorte no amortiguado consiste en un subsistema primario, con masa\(m_1\) y resorte\(k_1\), más un subsistema auxiliar más pequeño, con masa\(m_2\) y resorte\(k_2\); también, que una fuerza sinusoidal constante \(f_{1}(t)=F_{1} \cos \omega t\)actúa sobre\(m_1\), pero ninguna fuerza aplicada externamente actúa sobre\(m_2\),\(f_2(t) = 0\). Su tarea es resolver y evaluar las respuestas sinusoidales forzadas en estado estacionario\(y_{1}(t)=Y_{1}(\omega) \cos \omega t\) y\(y_{2}(t)=Y_{2}(\omega) \cos \omega t\). Para resolverlo, utilice la teoría desarrollada en la Sección 12.2, no el procedimiento más general descrito en la Sección 4.7 para encontrar funciones de frecuencia-respuesta.
Figura\(\PageIndex{4}\)
Determinar ecuaciones algebraicas para\(Y_{1}(\omega)\) y\(Y_{2}(\omega)\) en términos de\(m_1\)\(k_1\),\(m_2\),\(k_2\),\(F_1\), y\(\omega\). Además, escriba la ecuación característica del problema de la vibración libre, y explique qué sucede si sus raíces se sustituyen en las ecuaciones para\(Y_{1}(\omega)\) y\(Y_{2}(\omega)\).
Supongamos que se trata de un sistema para el que se requiere aislamiento de vibraciones: la masa primaria\(m_1\) incluye un motor o máquina reciprocante desequilibrada que oscila con frecuencia específica\(\omega=\Omega\), lo que tiende\(m_1\) a provocar que vibre verticalmente a la frecuencia\(\omega\); pero es deseable proteger de esa vibración la estructura de soporte a la que\(k_1\) está unido el resorte primario. (Ver tarea Problema 10.13 para una discusión adicional sobre el aislamiento de vibraciones.) De acuerdo con su solución en la parte 12.4.1, ¿qué sucede con las amplitudes\(Y_{1}(\Omega)\) de movimiento\(Y_{2}(\Omega)\) de\(m_1\) y de\(m_2\) si sintoniza la frecuencia de DOF único de la masa auxiliar y el resorte,\(m_2\) y\(k_2\), a la frecuencia de excitación, es decir, si diseña el sub-sistema auxiliar para que\(k_{2} / m_{2} \equiv \Omega^{2}\)? Con\(k_{2} / m_{2} \equiv \Omega^{2}\), ¿cuál es la fuerza sinusoidal\(k_{2}\left[y_{2}(t)-y_{1}(t)\right]\) que el resorte\(k_2\) impone sobre la masa primaria\(m_1\)? Con las respuestas correctas a estas preguntas, habrás explicado el funcionamiento de un amortiguador dinámico de vibraciones ideal sin amortiguar.
Un amortiguador dinámico de vibraciones ideal no amortiguado es inalcanzable en la realidad porque los sistemas siempre tienen alguna amortiguación. Además, incluso si pudiéramos eliminar mágicamente toda la amortiguación, el absorbedor ideal seguiría teniendo una grave deficiencia: si la frecuencia de excitación difiriera del valor nominal, lo que suele ocurrir en la práctica durante el arranque del motor o el funcionamiento fuera de lo nominal, entonces el sistema podría experimentar un 2-DOF falla de resonancia. Supongamos, por ejemplo, que tenemos los siguientes parámetros numéricos:\(m_1\) = 25.3 kg,\(k_1\) = 2.62 mN/m,\(\Omega / 2 / \pi\) = 50 Hz, y el subsistema auxiliar está sintonizado a 50 Hz con\(m_2\) = 5.066 kg y\(k_2\) = 0.5 mN/m Primero, resolver la ecuación característica para calcular los dos sistemas naturales frecuencias en Hz,\(f_{1}=\omega_{1} / 2 / \pi<f_{2}=\omega_{2} / 2 / \pi\); si lo desea, puede usar la función roots MATLAB para esta tarea. A continuación, calcular y trazar versus frecuencia de excitación (en Hz) la flexibilidad dinámica de frecuencia-respuesta\(Y_{1}(\omega) / F_{1}\),, del subsistema primario. El rango de frecuencias de excitación sobre el que se traza esta respuesta debe incluir al menos las tres frecuencias,,\(f_1\)\(\omega⁄ 2⁄ \pi\), y\(f_2\); probablemente incluso debería extenderse algo por debajo de la más baja de estas tres y algo por encima de la más alta. Asegúrese de incluir etiquetas de eje apropiadas en su gráfica. Su gráfica debe mostrar claramente tanto las fortalezas como las debilidades del amortiguador dinámico de vibraciones ideal sin amortiguar para estos parámetros numéricos particulares. 1
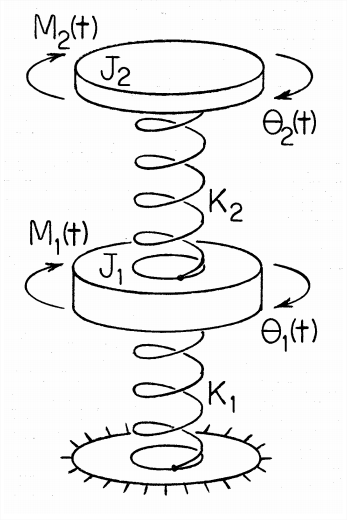
El dibujo a la derecha representa un sistema mecánico rotacional que es directamente análogo al sistema mecánico traslacional de la Figura 12.2.1. Las inercias rotacionales\(J_1\) y\(J_2\) son análogas, respectivamente, a las masas\(m_1\) y\(m_2\) en la Figura 12.2.1; los resortes rotacionales\(K_1\) y\(K_2\) son análogos a los resortes de traslación\(k_1\) y\(k_2\); los momentos aplicados\(M_1(t)\) y\(M_2(t)\) son análogos a fuerzas aplicadas\(f_1(t)\) y\(f_2(t)\); y rotaciones\(\theta_1(t)\) y\(\theta_2(t)\) son análogas a las traducciones\(y_1(t)\) y\(y_2(t)\). Por lo tanto, la ecuación matricial de movimiento para este sistema rotacional es directamente análoga a la Ecuación 12.2.3 para el sistema traslacional:
Figura\(\PageIndex{5}\)
\ [\ overbrackets {\ left [\ begin {array} {cc}
J_ {1} & 0\\
0 & J_ {2}
\ end {array}\ right]} ^ {\ text {matriz de inercia}}\ left [\ begin {array} {c}
\ ddot {\ theta} _ {1}\
\ ddot {\ theta} _ {2}
\ end {array}\ derecho] +\ overbrackets {\ left [\ begin {array} {cc}
K_ {1} +K_ {2} & -K_ {2}\
-K_ {2} & K_ {2} & K_ {2}
\ end {array}\ derecha]} ^ {\ text {matriz de rigidez estructural}}\ left [\ begin {array} {c}\ theta_ {1}
\\ theta_ {1}
\\ theta_ {2}
\ end {matriz }\ right] =\ left [\ begin {array} {c}
M_ {1} (t)\\
M_ {2} (t)
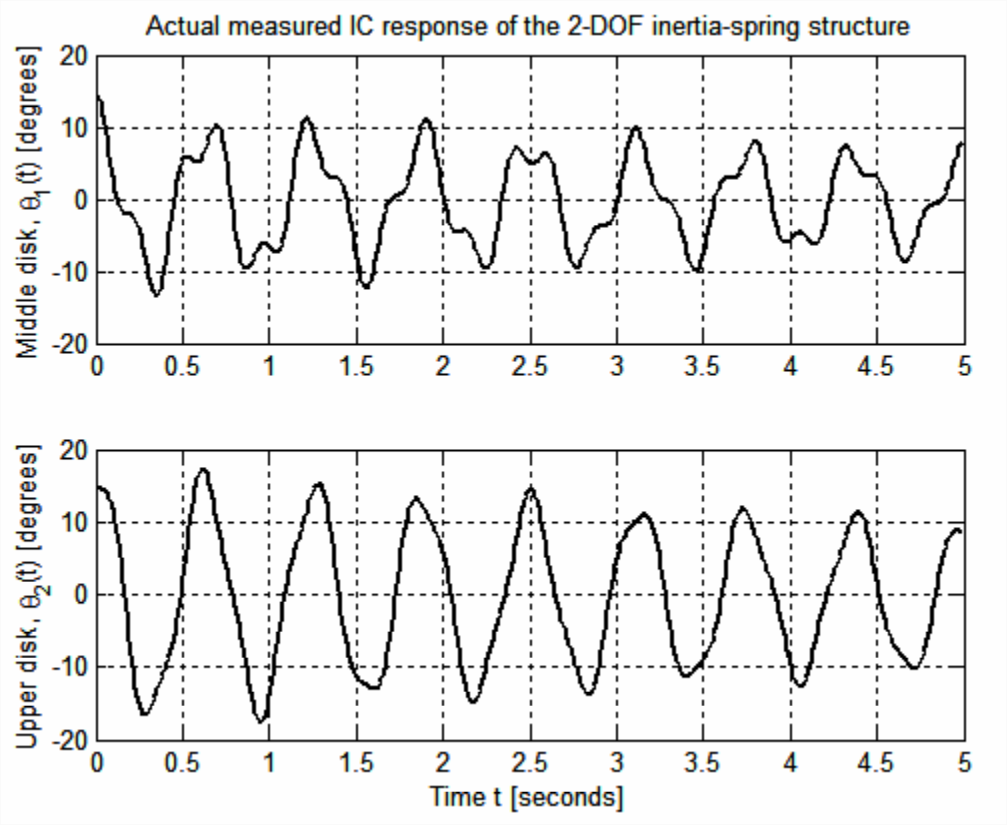
\ end {array}\ right]\ nonumber\] Considere un sistema de inercia-resorte 2-DOF con inercias rotacionales\(J_{1}=J_{2}=0.01042\) kg-m 2 y constantes de rigidez rotacional\(K_{1}=K_{2}=2.77\) N-m/rad. Tu tarea es calcular y trazar, a lo largo del intervalo de tiempo\(0 \leq t \leq 5\) segundos, las respuestas no forzadas de condición inicial (IC), rotaciones\(\theta_{1}(t)\) y\(\theta_{2}(t)\), de este sistema si las rotaciones iniciales son\(\theta_{1}(0)=\theta_{2}(0)=14.58\) grados, y las velocidades rotacionales iniciales son cero. Utilice la teoría (e incluso los cálculos apropiados, si lo desea) de la Sección 12.2. Las inercias y constantes de rigidez dadas son las de un sistema estructural real, el cual se describe en las dos páginas siguientes, y las condiciones iniciales dadas se impusieron a ese sistema, produciendo las respuestas medidas que se muestran en la gráfica siguiente a este párrafo. Sus respuestas teóricas deben parecer algo similares a las respuestas medidas, pero las respuestas teóricas y medidas deben diferir en un aspecto significativo. Lea la descripción a continuación del sistema estructural real, luego identifique la propiedad de todos los sistemas dinámicos mecánicos reales que no estén modelados por la teoría del Capítulo 12, y explique cómo se ilustra esta deficiencia de modelado en las diferencias entre las respuestas teóricas y medidas que se muestran en las gráficas.
Figura\(\PageIndex{6}\)
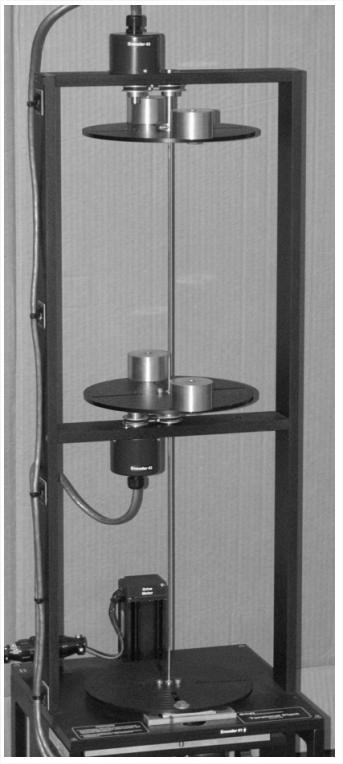
La fotografía de la página siguiente muestra la porción estructural relevante del sistema de laboratorio real 2 que está representado por el dibujo de la página anterior, y a partir del cual se midió la gráfica de respuesta CI anterior. Tres discos de acero están unidos a un eje continuo de acero de aproximadamente 3.2 mm de diámetro. Cada disco tiene 20 cm de diámetro y 0.5 cm de grosor, con cuatro ranuras radiales para acomodar masas agregadas. La longitud total del eje entre los discos inferior y superior es de aproximadamente 68 cm. El eje está soportado cerca de los discos medio y superior por cojinetes, que imponen cierta amortiguación en la estructura. El disco inferior está sujeto al bastidor, por lo que el eje se fija en la parte inferior pero es libre de torcerse en cualquier otro lugar a lo largo de su longitud. Dos cilindros metálicos, cada uno de masa nominal de 0.5 kg, están atornillados simétricamente a radios de 9 cm a cada uno de los discos medio y superior. Las inercias rotacionales de los dos discos abultados son órdenes de magnitud mayores que las del eje, por lo que este sistema es efectivamente una estructura rotacional de 2-DOF, siendo esas DOF rotaciones\(\theta_{1}(t)\) y\(\theta_{2}(t)\) de los discos medio y superior, respectivamente. \(\theta_{1}(t)\)y\(\theta_{2}(t)\) son detectadas por los codificadores ópticos mostrados en la fotografía; cada eje del codificador está conectado al eje estructural por una correa ligera y poleas, que agregan al sistema cierta amortiguación pero inercia insignificante.
Un estudiante inteligente determinó experimentalmente las inercias y las constantes de rigidez de este sistema, en lugar de basarse en cálculos puramente teóricos, principalmente utilizando el método de inercia añadida (de la tarea Problema 7.9). Para determinar\(J_2\) y\(K_2\), el alumno sujetó el disco medio al marco, y luego midió las frecuencias de vibración libre del disco superior [\(\theta_2(t)\)con\(\theta_1(t) = 0\)], tanto desnudo como con combinaciones añadidas simétricamente de los cilindros metálicos. El alumno determinó\(J_1\) y\(K_1 + K_2\) sujetando el disco superior, y luego midiendo las frecuencias de vibración libre del disco medio [\(\theta_1(t)\)con\(\theta_2(t) = 0\)]. Los valores de los parámetros determinados por este proceso son\(J_{1}=J_{2}=0.01042\) (\(\pm 0.00003\)) kg-m 2 y\(K_{1}=K_{2}=2.77\) (\(\pm 0.04\)) n-m/rad.
Las rotaciones iniciales,\(\theta_{1}(0)=\theta_{2}(0)= 14.58^{\circ}\), se impusieron a los discos medio y superior por twang, también conocido como snapback, excitación: se ató un hilo fino alrededor del cilindro delantero del disco medio, el hilo se tiró lateralmente y se ancló el extremo opuesto, imponiendo así en el disco medio la inicial estática rotación, luego el hilo se cortó con tijeras, liberando abruptamente los discos medio y superior para liberar la vibración. El eje estructural se fijó solo en la parte inferior, por lo que la rotación inicial del disco superior fue la misma que la del disco medio.
Figura\(\PageIndex{7}\)
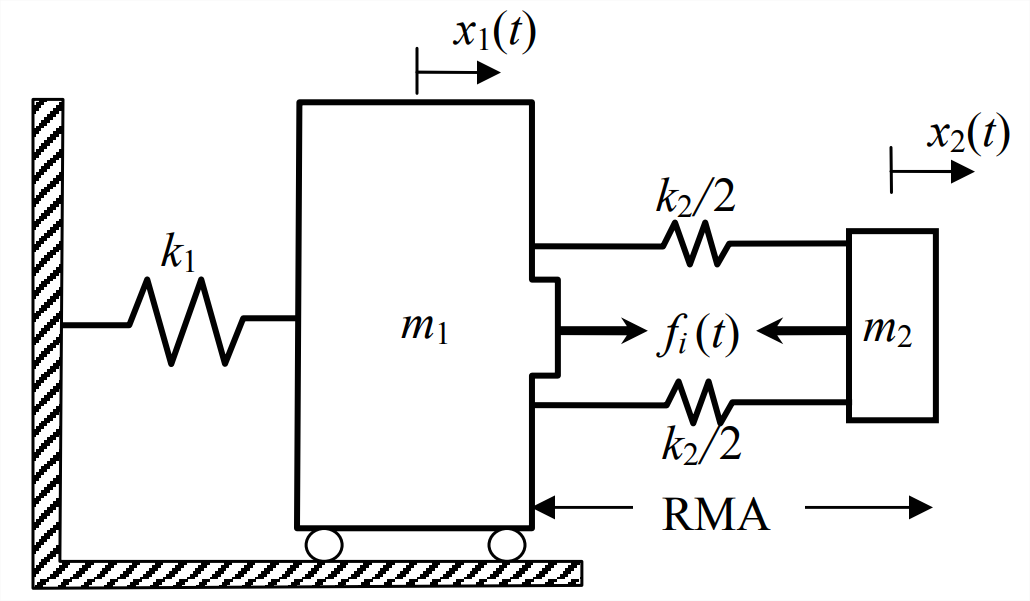
El modo fundamental de vibración de una estructura se representa en el dibujo siguiente por masa\(m_1\) y resorte\(k_1\), con la traslación de\(m_1\) denotada como\(x_1(t)\). Supongamos que deseamos ejercer un control activo sobre esa vibración mediante el uso de un accesorio a la estructura: un actuador de masa de reacción (RMA), representado en el diagrama por la masa de reacción\(m_2\), el resorte\(k_2\) y la fuerza generada internamente\(f_i(t)\) que actúa igual y opuestamente sobre\(m_2\) y \(m_1\), con la traducción de\(m_2\) denotado como\(x_2(t)\). (Para simplificar las ecuaciones aquí, descuidamos la amortiguación pasiva natural normalmente pequeña inherente tanto a las estructuras como a las RMA). Utilice la Ecuación 12.2.3 para escribir la ecuación matricial de movimiento para esta combinación de estructura y RMA. A continuación, revise esta ecuación para incluir el tipo particular de control de vibración por retroalimentación que se describe a continuación. Supongamos que la masa de reacción\(m_2\) lleva un transductor que detecta la velocidad de traslación de\(m_2\)relativa a la de\(m_1\) y genera una señal de voltaje eléctrico proporcional a esa velocidad relativa\(e_{v}(t)=V\left(\dot{x}_{2}-\dot{x}_{1}\right)\), donde\(V\) es una constante de calibración con unidades como voltio por metro/s. tarea Problema 10.15 explica que una señal de voltaje externa\(e_i(t)\) [no mostrada en este dibujo] comanda fuerza interna de\(f_i(t)\) acuerdo a la relación lineal\(f_{i}(t)=G e_{i}(t)\),\(G\) siendo una constante con unidades como newton por voltio. Supongamos que multiplicamos la señal de velocidad relativa\(e_v(t)\) por un factor de ganancia variable\(F\) (usando, por ejemplo, un amplificador no inversor, tarea Problema 5.8) y luego retroalimentamos la señal multiplicada para que sirva como señal de comando de fuerza,\(e_{i}(t)=F e_{v}(t)=F V\left(\dot{x}_{2}-\dot{x}_{1}\right)\). Por lo tanto, la fuerza interna generada es\(f_{i}(t)=G e_{i}(t)=G F V\left(\dot{x}_{2}-\dot{x}_{1}\right) \equiv C\left(\dot{x}_{2}-\dot{x}_{1}\right)\), donde definimos la constante de retroalimentación global\(C ≡ GFV\) con unidades como newton por metro/segundo. Revisar su ecuación matricial de movimiento para reflejar el control de vibración de retroalimentación descrito aquí; en particular, mostrar que la retroalimentación produce una matriz de amortiguación viscosa artificial,\ (C\ left [\ begin {array} {cc}
1 & -1\\
-1 & 1
\ end { array}\ derecho]\). Con un factor de ganancia de retroalimentación suficientemente grande\(F\) y suficiente autoridad del generador de fuerza interna del RMA, esta forma de control puede imponer una amortiguación positiva significativa sobre la vibración de una estructura.
Figura\(\PageIndex{8}\)
NOTA: No se requiere en este problema, pero podría ser de su interés que reemplazar la variable dependiente\(x_2(t)\) con la traducción relativa de la masa de reacción\(m_2\),\(z(t) = x_2(t) − x_1(t)\) pueda transformar la ecuación matricial del movimiento en la siguiente forma, en la que la matriz de inercia se vuelve completo y simétrico, pero las matrices artificiales de amortiguación y rigidez se vuelven más simples y diagonales:\ [\ left [\ begin {array}
{cc} m_ {1} +m_ {2} & m_ {2}\
m_ {2} & m_ {2}
\ end {array}\ right]\ left [\ begin {array} {c}
\ ddot {x} _ {1}\\
\ ddot {z}
\ end {array}\ right] +\ left [\ begin {array} {cc}
0 & 0\\
0 & C
\ end {array}\ right]\ left [\ begin {array} {c}
\ dot {x} _ {1}\\ punto {z}
\\ punto {z}
\ end {array}\ derecha] +\ izquierda [\ begin {array} {cc}
k_ {1} & 0\\
0 & k_ {2}
\ end {array}\ right]\ left [\ begin {array} {c}
x_ {1}\\
z
\ end {array}\ right] =\ left [\ begin {array} {l}
0\\
0
\ end {array}\ derecha]\ nonumber\]
1 Tarea Problema 12.4 es solo una introducción al tema de los amortiguadores dinámicos de vibraciones. Ver Den Hartog, 1956, Secciones 3.2 y 3.3, para un tratamiento más avanzado y extenso de esta materia.
2 Esta es una Planta Torsional Modelo 205a diseñada y fabricada por Educational Control Products de Bell Canyon, California, USA.