
14.1: Definiciones iniciales y terminología
- Page ID
- 84618

Como introducción al control de retroalimentación y asuntos relacionados, este capítulo considera una tarea común para muchos sistemas de ingeniería: el control remoto (indirecto) de la posición rotacional de algún cuerpo sólido; vamos a referirnos a este cuerpo sólido genéricamente como el rotor. La entrada a un sistema de control de rotación es típicamente una orden emitida por un operador humano usando un dispositivo como un volante, columna de control, dial, teclado de computadora, etc.; la entrada también puede ser una señal generada por computadora que lleva instrucciones previamente programadas. La salida es la posición rotacional del rotor. Los modificadores “remoto” e “indirecto” de “control” significan que no existe un enlace directo, rígido y mecánico entre el dispositivo de entrada y el rotor; en cambio, para un sistema de control remoto, podría existir entre el dispositivo de entrada y el rotor equipos de ingeniería tales como sensores, circuitos eléctricos, señal procesadores (analógicos y/o digitales), enlaces o cables flexibles, transmisores y receptores electromagnéticos o acústicos, y actuadores de muchos tipos (motores, propulsores, etc.).
Los siguientes son algunos de los muchos “rotores” en la práctica moderna de la ingeniería con los que probablemente esté familiarizado: superficies de control aerodinámicas e hidrodinámicas, como timones, elevadores y alerones; los mecanismos de dirección que guían vehículos terrestres y aviones de rodaje; boquillas de motores de cohetes o vectores- motores de chorro de empuje; cualquier vehículo completo en sí, cuya orientación rotacional tridimensional (balanceo, cabeceo, guiñada) generalmente se denomina actitud del vehículo. Probablemente puedas agregar otros rotores a esta lista desde tu propia experiencia.
En general, el centro de masa de un cuerpo sólido puede tener tres grados de libertad de rotación. Sin embargo, para mantener la dinámica rotacional simple aquí y enfocarnos en el control de retroalimentación, limitaremos nuestra atención a rotores rígidos que rotan en un plano alrededor de un punto fijo, de manera que solo haya un grado de libertad rotacional.
Considere el rotor genérico simple que se muestra en la Figura\(\PageIndex{1}\). Especificemos que se restringe a girar alrededor del eje del eje, que su ángulo de rotación relativo a alguna posición de referencia es\(\theta(t)\), y que su velocidad angular es\(p(t) \equiv \dot{\theta}\). La inercia rotacional del rotor alrededor del eje de rotación se denota como\(J\), y el momento total aplicado sobre el rotor por todas las fuentes se denota como\(M(t)\). Este es el objeto físico que deseamos controlar; en la terminología de control, el objeto o proceso a controlar a menudo se llama planta.
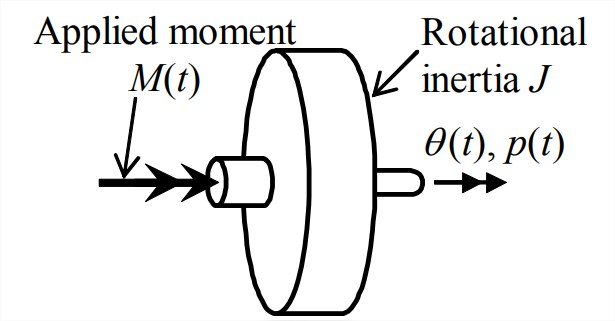
Siempre que no exista un momento de amortiguación proporcional al\(p(t)\) impuesto sobre el rotor, la ecuación de movimiento para la planta de la Figura\(\PageIndex{1}\) es una versión simplificada de la Ecuación 3.3.2:
\[J \dot{p}=J \ddot{\theta}=M(t)\label{eqn:14.1} \]
Derivamos la función de transferencia de la planta\(PTF(s)\), tomando la transformada de Laplace de Ecuación\(\ref{eqn:14.1}\) con cero condiciones iniciales:
En nuestro trabajo anterior, solíamos suponer que\(M(t)\) se conoce, y luego resolvimos para el resultante\(p(t)\) y/o\(\theta (t)\). Ahora, nuestro objetivo es diferente: para el control, queremos comandar un historial de tiempo de posición de rotor deseado. El comando suele ser algo así como una posición del volante o un ajuste de dial, o una señal que lleva instrucciones generadas por computadora. Para distinguir el comando de entrada del ángulo del rotor de salida, introducimos un símbolo diferente para el comando:
La configuración del operador\(r(t)\) es la cantidad de entrada de referencia, que se transmite al sistema por circuitos eléctricos, enlaces o cables mecánicos, ondas electromagnéticas o acústicas, etc.