
6.4: Respuesta de frecuencia y ruido
- Page ID
- 83430

Al igual que el cumplimiento y la distorsión, otros dos límites prácticos en el rendimiento del amplificador son su respuesta de frecuencia y ruido de salida. Primero, hablemos de la respuesta de frecuencia.
Aunque describimos un amplificador como que tiene una ganancia o factor de amplificación específico, esto es cierto solo para un cierto rango de frecuencias. Todos los amplificadores están limitados en cuanto al rango de frecuencias sobre las cuales pueden operar. Si examinamos el rendimiento de un amplificador a frecuencias extremas, la ganancia puede ser mucho menor que el valor nominal. De hecho, si vamos lo suficientemente lejos, la ganancia puede incluso ser fraccionaria, lo que significa que el “amplificador” en realidad está reduciendo el nivel de la señal.
La región donde la ganancia nominal es precisa se conoce como la banda media. Este rango se define por una o dos frecuencias de esquina o ruptura. El límite inferior se conoce como\(f_1\) mientras que el límite superior se conoce como\(f_2\). En estas frecuencias, el nivel de salida ha caído a la mitad de la potencia exhibida por una frecuencia de banda media del mismo nivel de entrada. En la Figura se muestra una gráfica de ganancia versus respuesta de frecuencia que encapsula este concepto\(\PageIndex{1}\).
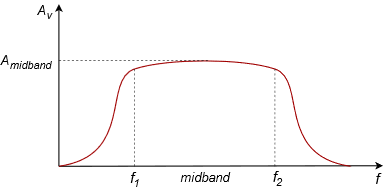
Figura\(\PageIndex{1}\): Gráfica genérica de ganancia versus frecuencia.
En esta gráfica representativa es evidente que solo las señales de entrada cuyas frecuencias se encuentran entre\(f_1\) y\(f_2\) recibirán amplificación completa. A medida que la frecuencia de entrada se mueve a ambos lados de la banda media, la ganancia comienza a disminuir. La caída aumenta a medida que la frecuencia de la señal se mueve cada vez más lejos. Eventualmente la ganancia caerá prácticamente a cero y prácticamente no aparecerá rastro de la señal de entrada en la salida.
Los valores precisos de las frecuencias de esquina dependerán de la aplicación. Por ejemplo, lo más probable es que un amplificador de audio de alta fidelidad tenga una frecuencia\(f_1\) inferior a 20 Hz y una\(f_2\) superior a 20 kHz21, mientras que un amplificador utilizado para sistemas telefónicos podría oscilar entre 300 Hz y 4 kHz22. Por el contrario, un amplificador de radiofrecuencia puede estar operando a frecuencias órdenes de magnitud superiores a estas.
Sin excepción, todos los amplificadores tienen una frecuencia límite superior\(f_2\),, pero no todos tienen un límite de frecuencia inferior,\(f_1\). Los amplificadores sin límite inferior pueden amplificar señales con frecuencias hasta CC. Se les conoce como amplificadores de acoplamiento directo o de CC. El límite de frecuencia inferior suele ser causado por capacitores de acoplamiento en línea y, en algunos casos, transformadores. Entre otros usos, estos componentes se agregan para bloquear intencionadamente DC. Hay buenas razones para hacer esto, como veremos en los próximos trabajos, sin embargo, es posible diseñar amplificadores sin ellos. El amplificador resultante no tendrá entonces límite sobre qué tan baja frecuencia puede amplificar.
La frecuencia límite superior es otra historia. Si bien a menudo se agregan componentes para adaptar la respuesta de frecuencia superior de un amplificador, incluso si no se desea ninguna confección, el amplificador aún tendría una frecuencia límite superior. Esto se debiría a las pequeñas e inevitables capacitancias e inductancias que existen en el circuito, por ejemplo la capacitancia de cableado parásito. En última instancia, las reactancias correspondientes provocarán una reducción del nivel de señal que empeora a medida que aumenta la frecuencia. Como puede adivinar, estas reactancias también causan cambios de fase variables entre la señal de entrada y la señal de salida.
El rendimiento del amplificador también está limitado por su ruido interno. El ruido es una señal no deseada que aparece en la salida de un amplificador. A diferencia de la distorsión, el ruido generalmente no se correlaciona con el nivel de señal de entrada Generalmente, el ruido es de banda ancha, lo que significa que contiene un rango muy amplio de frecuencias. Como tal, no tiene un tono discernible. Ejemplos en la naturaleza incluyen el sonido de las hojas susurrando en el viento o el sonido de una cascada. El ruido se considera mejor como una señal verdaderamente aleatoria. Como tal, no se puede predecir con precisión y por lo tanto no hay una manera fácil de eliminarlo una vez que se ha agregado a una señal deseada. Hay muchas fuentes potenciales de ruido en un amplificador. Van desde cuestiones de proceso en semiconductores hasta efectos térmicos en elementos resistivos. En general, el ruido empeora a medida que aumentan la temperatura, la resistencia y el rango de frecuencia. El ruido es inevitable en términos absolutos pero en última instancia lo que nos importa es si es o no lo suficientemente bajo para una aplicación determinada. En otras palabras, ¿el nivel de ruido es significativamente menor que el nivel de señal, hasta el punto en que ya no es un problema? Esto se cuantifica simplemente creando una relación entre el nivel de señal de salida nominal y el nivel de ruido de salida. A esta relación se le da el nombre muy creativo relación señal-ruido, o\(S/N\) para abreviar. Siendo iguales todos los demás factores, cuanto más alto sea\(S/N\), mejor.
Referencias
1 20 Hz — 20 kHz es el rango de frecuencias que escucha un humano joven sano típico.
2 Decididamente no de alta fidelidad, pero ¿realmente necesitamos alta fidelidad para llamar a una orden de comida para llevar?