
4.3: Calibración
- Page ID
- 80864

Los componentes de un sistema de medición por microondas introducen errores sustanciales. Afortunadamente un analizador de redes es un instrumento muy estable y los errores se reproducen fielmente. Esto significa que se puede usar un procedimiento de calibración para determinar los errores y luego los errores se pueden eliminar de las mediciones sin procesar del dispositivo que se está midiendo, lo que, por convención, se llama

Figura\(\PageIndex{1}\): Red de error de dos puertos con tres cargas de calibración diferentes.
el dispositivo bajo prueba (DUT). Todo lo que se necesita para determinar los parámetros de un puerto de dos puertos son tres cargas conocidas con precisión.
La calibración del sistema de medición es crítica, ya que el efecto del cableado y los conectores puede ser más significativo que el del dispositivo que se está midiendo. El proceso de eliminación del efecto del cableado y los conectores se llama desincrustación. Idealmente, estarían disponibles cargas perfectas cortas, abiertas y coincidentes, pero estas solo se pueden aproximar, y se han desarrollado numerosos esquemas para formas alternativas de calibrar un sistema de medición de RF. En algunos casos, por ejemplo, en la medición de circuitos integrados utilizando lo que se llama sondeo en oblea, es muy difícil realizar una buena coincidencia. Una solución es utilizar estándares de calibración que consisten en combinaciones de longitudes de línea de transmisión y reflexiones repetibles. Estos procedimientos de calibración se conocen principalmente por combinaciones de las letras T, R y L, como TRL de línea de reflexión pasante [3] (que se basa en una línea de transmisión de impedancia característica conocida para reemplazar la coincidencia); o a través de línea (TL), [4, 5] (que se basa en simetría para reemplazar el tercer estándar).
4.3.1 Calibración de un puerto
En las mediciones de un puerto no se puede obtener directamente el coeficiente de reflexión deseado. En cambio, existe efectivamente una red de errores entre el plano de medición en la carga y el puerto interno ideal del analizador de red. El modelo de red [6] del sistema de medición se muestra en la Figura\(\PageIndex{1}\) junto con tres estándares de calibración ideales. La calibración, aquí, se ocupa de determinar los\(S\) parámetros del error de dos puertos.
Se han desarrollado diversos esquemas de calibración, algunos de los cuales son mejores en entornos de medición particulares, como cuando se miden estructuras en chip. Los esquemas de calibración comparten ciertos puntos en común. Una de ellas es que los errores pueden representarse como dos puertos (o varios dos puertos) que existe entre un plano de referencia efectivo interno al equipo de medición y el plano de referencia en el dispositivo a medir. Este dispositivo se llama comúnmente el dispositivo bajo prueba (DUT). Los estándares conocidos se colocan en el plano de referencia del dispositivo y se realizan las mediciones. El concepto se ilustra considerando la determinación de los\(S\) parámetros de los dos puertos mostrados en la Figura\(\PageIndex{1}\). \(Z_{1}\)Al ser una carga coincidente, el coeficiente de reflexión de entrada\(\Gamma_{1}\) es\(S_{11}\):
\[\label{eq:1}S_{11}=\Gamma_{1} \]
Las otras cargas de calibración comúnmente utilizadas son\(Z_{2} = 0\) (un cortocircuito) y\(Z_{3} =\infty\) (un circuito abierto). En los cortocircuitos de precisión de calibración y se abren
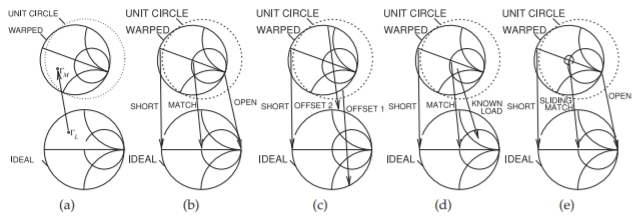
Figura\(\PageIndex{2}\): Calibraciones como operaciones de mapeo con cada mapeo de calibración que tiene una gráfica Smith deformada y una gráfica Smith ideal. La medición en bruto de un coeficiente de reflexión de una carga no es el coeficiente de reflexión real\(\Gamma_{L}\), sino la medida en bruto\(\Gamma_{M}\), que aparece en un gráfico de Smith que está deformado (ver (a)). En la calibración, las mediciones en bruto de los estándares también aparecen en el gráfico de Smith deformado aunque se conocen sus valores reales: (b) calibración como mapeo establecido usando estándares de calibración cortos, coincidentes y abiertos; (c) mapeo usando estándares de calibración cortos y dos compensados cortos; (d) mapeo usando un corto , una coincidencia y una carga conocida como estándares de calibración; y (e) mapeo usando una carga corta, una abierta y una carga coincidente deslizante como estándares de calibración.
y los errores involucrados son conocidos e incorporados en el procedimiento de calibración más detallado. A partir de estos,\(S_{12} = S_{21}\) y se\(S_{22}\) pueden derivar:
\[\label{eq:2}S_{22}=\frac{2S_{11}-\Gamma_{2}-\Gamma_{3}}{\Gamma_{2}-\Gamma_{3}} \]
y
\[\label{eq:3}S_{21}=S_{12}=[(\Gamma_{3}-S_{11})(1-S_{22})]^{\frac{1}{2}} \]
El error de dos puertos modifica el coeficiente de reflexión real de un DUT a un coeficiente de reflexión deformado (pero calibrado) de acuerdo con la Ecuación (3.2.12). En la Ecuación (3.2.12), el coeficiente de reflexión de carga\(\Gamma_{L}\), es un número complejo que se escala, gira y desplaza antes de ser presentado en\(\Gamma_{\text{in}}\). Además, los círculos del coeficiente de reflexión se mapean a círculos en el plano complejo deformado; es decir, el gráfico Smith ideal se mapea a un gráfico Smith deformado. Aquí el coeficiente de reflexión de carga real\(\Gamma_{L}\),, es deformado para presentar un coeficiente de reflexión medido,\(\Gamma_{M}\) al analizador de red interno. La calibración se puede ver como una operación de mapeo desde el plano complejo de mediciones en bruto hasta el plano complejo de mediciones ideales, como se muestra en la Figura\(\PageIndex{2}\) (a). Es decir, la calibración desarrolla el mapeo requerido. La Figura\(\PageIndex{2}\) (b—e) muestra cómo se desarrolla el mapeo corregido utilizando diferentes conjuntos de estándares de calibración. La operación de mapeo que se muestra en la Figura\(\PageIndex{2}\) (b) utiliza las cargas cortas, abiertas y coincidentes. Este procedimiento de calibración de un puerto se denomina calibración de carga corta abierta o SOL y está disponible como algoritmo de calibración en todos los analizadores de red. Los tres estándares están bien distribuidos sobre el gráfico Smith y así el mapeo se puede extraer con buena precisión. Si bien las cargas ideales cortas, abiertas y coincidentes no están disponibles, si las terminaciones están bien caracterizadas, se pueden hacer las correcciones apropiadas. El mapeo en el caso de un puerto se materializa en el\(S\)

Figura\(\PageIndex{3}\): Estándares de calibración de precisión.
parámetros de los dos puertos.
La figura\(\PageIndex{3}\) (a) muestra la sección longitudinal de una apertura coaxial de precisión. La característica clave es que el conductor coaxial externo se extiende y la capacitancia de flecos en el extremo del conductor central se puede calcular analíticamente. Así, la apertura de precisión no es una apertura perfecta, sino más bien una apertura que puede modelarse como un pequeño condensador cuya variación de frecuencia se conoce. La figura\(\PageIndex{2}\) (c) utiliza cortocircuitos compensados (es decir, líneas de transmisión cortocircuitadas de varias longitudes). Esto elude el problema de las cargas abiertas y coincidentes difíciles de producir. Se requiere cuidado en la elección de las compensaciones para garantizar que el mapeo se pueda determinar con precisión. El esquema de calibración mostrado en la Figura\(\PageIndex{2}\) (d) introduce una carga conocida. El mapeo no se puede extraer fácilmente aquí, pero en algunas situaciones esta es la única opción. La Figura\(\PageIndex{2}\) (e) introduce un nuevo concepto en calibración con el uso de una carga deslizante adaptada como la mostrada en la Figura\(\PageIndex{3}\) (b). No se puede producir una carga perfecta y siempre hay, en el mejor de los casos, un pequeño error de resistencia y quizás capacitancia parásita. Cuando se mide, la reflexión tendrá un pequeño desplazamiento con respecto al origen. Si se mueve la carga emparejada, como con una carga coincidente deslizante, se trazará un pequeño círculo centrado en el origen y el centro de este círculo es la carga emparejada ideal.
4.3.2 Desincrustación
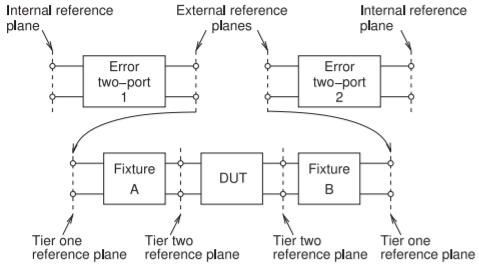
La calibración de un puerto descrita anteriormente puede repetirse para dos puertos, dando como resultado el modelo de error de dos puertos de la Figura\(\PageIndex{4}\) (a), el modelo de error para corregir mediciones de dos puertos. Usando la matriz de dispersión de cadena (o\(\mathbf{T}\) matriz\(^{1}\)) introducida en la Sección 2.6, la matriz de\(\mathbf{T}\) parámetros medida en los planos de referencia internos del analizador de red es
\[\label{eq:4}\mathbf{T}_{\text{MEAS}}=\mathbf{T}_{A}\mathbf{T}_{\text{DUT}}\mathbf{T}_{B} \]
donde\(\mathbf{T}_{A}\) está la\(\mathbf{T}\) matriz del primer error de dos puertos,\(\mathbf{T}_{\text{DUT}}\) es la\(\mathbf{T}\) matriz del dispositivo bajo prueba, y\(\mathbf{T}_{B}\) es la\(\mathbf{T}\) matriz del error de la derecha de dos puertos. La manipulación de la ecuación\(\eqref{eq:4}\) conduce a\(\mathbf{T}_{\text{DUT}}\):
\[\begin{align}\label{eq:5}\mathbf{T}_{A}^{-1}\mathbf{T}_{\text{MEAS}}\mathbf{T}_{B}^{-1}&=\mathbf{T}_{A}^{-1}\mathbf{T}_{A}\mathbf{T}_{\text{DUT}}\mathbf{T}_{B}\mathbf{T}_{B}^{-1}\\ \label{eq:6}\mathbf{T}_{\text{DUT}}&=\mathbf{T}_{A}^{-1}\mathbf{T}_{\text{MEAS}}\mathbf{T}_{B}^{-1}\end{align} \]
a partir del cual se pueden obtener los\(S\) parámetros del DUT.
4.3.3 Calibración de dos puertos
En la Figura 4.2.1 se muestra la arquitectura VNA introducida en 1968 y que todavía se usa comúnmente en la actualidad. Un componente clave del sistema es el conjunto de prueba que comprende interruptores mecánicos de microondas y acopladores direccionales que acoplan selectivamente energía en las ondas que viajan hacia adelante o hacia atrás. Muchos VNA modernos utilizan múltiples mezcladores e interruptores electrónicos para
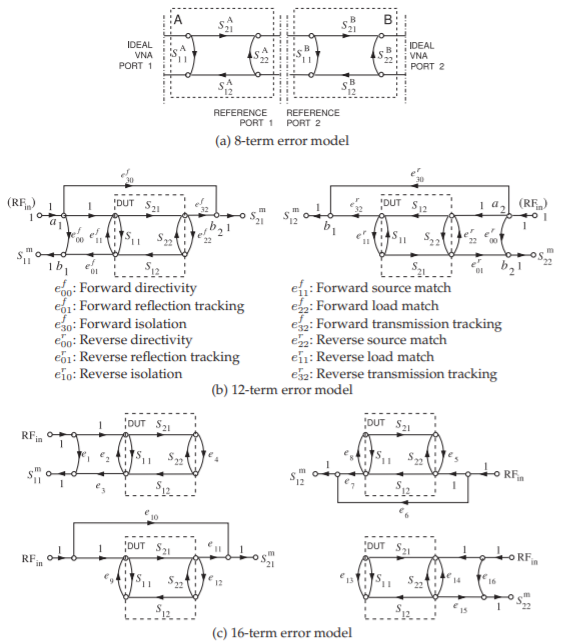
Figura\(\PageIndex{4}\): Modelos de error de dos puertos: (a) representación SFG del modelo de error de dos puertos de 8 términos (1968) [1]); (b) SFG del modelo de error de dos puertos de 12 términos (1978) [7]; y (c) SFG del modelo de error de dos puertos de 16 términos (circa 1979) [8]. \(S_{ij}^{m}\)son las mediciones de\(S\) parámetros brutos,\(S_{ij}\) son los\(S\) parámetros del DUT y,\(e_{ij}\)\(e_{ij}^{r}\), y\(e_{ij}^{f}\) son\(S\) parámetros de error determinados durante la calibración.
eliminar la necesidad de interruptores mecánicos. La operación es similar. Volviendo a la arquitectura de la Figura 4.2.1, esta arquitectura soporta una única fuente de señal y un solo puerto de prueba en el que la señal de RF a medir se mezcla a baja frecuencia\(100\text{ kHz}\), típicamente, donde es capturada por un ADC. El componente de mezcla se llama convertidor de frecuencia, y mezcla la señal de RF con una versión de la señal de RF original offset en frecuencia para producir una versión de baja frecuencia de la señal de RF. Esta tiene la misma fase que la señal de RF y una amplitud que es linealmente proporcional a la señal de RF. Cuando Hackborn introdujo este sistema en 1968 [1], también introdujo el modelo de error de 8 términos que se muestra en la Figura\(\PageIndex{4}\) (a). Esta es una extensión del modelo de error de un puerto discutido en la Sección 4.3.1, con dos puertos que captura los errores de medición a cada puerto.
Un examen más detallado del sistema VNA de la Figura 4.2.1 indica que la trayectoria de la señal varía para cada uno de los cuatro parámetros de dispersión para un DUT. Otra imperfección que no es inmediatamente obvia es que hay fuga en el sistema para que los Puertos\(\mathsf{1}\) y\(\mathsf{2}\) estén acoplados por una serie de mecanismos que no implican la transmisión de la señal a través del DUT. La fuga se debe al aislamiento finito en los mezcladores y al acoplamiento directo entre las sondas utilizadas para hacer contacto en los Puertos\(\mathsf{1}\) y\(\mathsf{2}\), entre otras posibles causas. La primera persona en identificar esto fue Shurmer [9] en 1973, conduciendo finalmente al modelo de error de 12 términos [7, 10] que se muestra en la Figura\(\PageIndex{4}\) (b). La calibración produce los parámetros de error, y los\(S\) parámetros del DUT se encuentran de la siguiente manera:
\[\begin{align}\label{eq:7}S_{11}&=\frac{1}{\delta}\left\{\left[\frac{S_{11}^{m}-e_{00}^{f}}{e_{01}^{f}}\right]\left[1+\frac{S_{22}^{m}-e_{00}^{r}}{e_{01}^{r}}e_{22}^{r}\right]-e_{22}^{f}\left[\frac{S_{21}^{m}-e_{30}^{f}}{e_{32}^{f}}\right]\left[\frac{S_{12}^{m}-e_{10}^{r}}{e_{32}^{r}}\right]\right\} \\ \label{eq:8}S_{21}&=\frac{1}{\delta}\left\{\left[\frac{S_{21}^{m}-e_{30}^{f}}{e_{32}^{f}}\right]\left[1+\frac{S_{22}^{m}-e_{00}^{r}}{e_{01}^{r}}\left(e_{22}^{r}-e_{22}^{f}\right)\right]\right\} \\ \label{eq:9}S_{12}&=\frac{1}{\delta}\left\{\left[\frac{S_{12}^{m}-e_{10}^{r}}{e_{32}^{r}}\right]\left[1+\frac{S_{11}^{m}-e_{00}^{f}}{e_{01}^{f}}\left(e_{11}^{f}-e_{11}^{r}\right)\right]\right\} \\ \label{eq:10}S_{22}&=\frac{1}{\delta}\left\{\left[\frac{S_{22}^{m}-e_{00}^{r}}{e_{01}^{r}}\right]\left[1+\frac{S_{11}^{m}-e_{00}^{f}}{e_{01}^{f}}e_{11}^{f}\right]-e_{11}^{r}\left[\frac{S_{21}^{m}-e_{30}^{f}}{e_{32}^{f}}\right]\left[\frac{S_{12}^{m}-e_{10}^{r}}{e_{32}^{r}}\right]\right\} \\ \delta&=\left[1+\frac{S_{11}^{m}-e_{00}^{f}}{e_{01}^{f}}e_{11}^{f}\right]\left[1+\frac{S_{22}^{m}-e_{00}^{r}}{e_{01}^{r}}e_{22}^{r}\right] \\ \label{eq:11}&\quad -e_{22}^{f}e_{11}^{r}\left[\frac{S_{21}^{m}-e_{30}^{f}}{e_{32}^{f}}\right]\left[\frac{S_{12}^{m}-e_{10}^{r}}{e_{32}^{r}}\right]\end{align} \]
El modelo más completo es el modelo de error de 16 términos introducido en 1979 y mostrado en la Figura\(\PageIndex{4}\) (c), que incorpora un modelo diferente para cada parámetro y captura completamente las diversas trayectorias de señal resultantes de las diferentes posiciones de conmutación [8]. Sin embargo, el modelo de error de 12 términos es el más utilizado en las mediciones de microondas y es suficiente para extraer de manera confiable\(S\) los parámetros deseados del DUT de las mediciones de VNA en bruto. Este proceso de extracción de los parámetros desincrustados se llama desincrustación, o menos comúnmente, no terminación.
El modelo de error de 12 términos modela el error introducido por fuga o diafonía interna al analizador de red. El modelo de error de 16 términos captura la fuga o diafonía del modelo de error de 12 términos, pero además incluye fugas de conmutación que dan como resultado señales de error que se reflejan desde el DUT y fugas al puerto de transmisión, así como fugas en modo común [11]. Este método se denomina calibración de descomposición de valor singular (SVD) de 16 términos de dos puertos, ya que las ecuaciones se resuelven en un sentido de mínimos cuadrados utilizando el método de descomposición de valores singulares [11]. En un entorno coaxial, los términos de fugas adicionales son pequeños, siempre que los interruptores tengan un alto aislamiento. Sin embargo, en el sondeo de obleas donde el acoplamiento directo entre las sondas puede ser apreciable, la fuga relacionada con la transmisión puede ser importante y el modelo de error de 16 términos captura errores que el modelo de error de 12 términos no produce. Estos modelos de error y la secuencia de mediciones para extraerlos se incluyen en el software de control VNA. El usuario deberá seleccionar cuál utilizar.
Calibración coaxial de dos puertos
Si el DUT tiene conectores coaxiales, entonces hay disponibles cargas de precisión abiertas, cortas y coincidentes. Si bien estos no son componentes ideales, el abierto tiene capacitancia de flecos; por ejemplo, están bien caracterizados sobre frecuencia. El conjunto completo de estándares requeridos para desarrollar el modelo de error de 12 términos incluye mediciones de un puerto para cada puerto con conexiones abiertas, cortas y coincidentes, una medición de dos puertos con una conexión pasante y una medición de dos puertos con aperturas en cada puerto. La última medición determina el aislamiento interno del sistema. La mayoría de los conectores vienen en homólogos macho y hembra. Como tal, no es posible crear un paso perfecto uniendo los conectores y se introduce un pequeño retardo. Sin embargo, hay conectores sexless, como el conector de precisión Amphenol (APC-7) con un diámetro\(7\text{ mm}\) exterior ya que tiene una cara al ras que se puede conectar para un paso casi perfecto. El conector APC-7 ya no se usa comúnmente, con la mayoría de los sistemas coaxiales ahora usando conectores SMA o los conectores APC 3.5 de mayor tolerancia que vienen en conectores macho y hembra. La mayoría de las medidas deseadas en estos días son de CI y otras estructuras planas para las cuales no hay conector transparente. El problema del conector, o accesorio, ha resultado en una variedad de estándares que se utilizan.
Calibración de circuito plano
Se requieren estándares de calibración en las mediciones de microondas. Para las mediciones de sistemas de microcinta y CPW, están disponibles sustratos de alúmina de calibración estándar, ver Figura 4.2.5 (d y e). Estos sustratos de calibración incluyen varias longitudes de líneas de transmisión que se pueden usar como estándares, así como una carga adaptada abierta, corta y recortada con láser.
4.3.4 Esquemas de calibración basados en líneas de transmisión
Un inconveniente de todas las técnicas de desincrustación que utilizan mediciones repetidas del accesorio durante el proceso de desincrustación es la generación de errores causados por la falta de reproducibilidad del accesorio durante las mediciones de cada uno de los estándares requeridos. Estos errores pueden amplificarse durante el transcurso de la desincrustación.
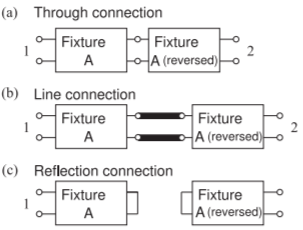
La técnica TRL [3] es un procedimiento de calibración utilizado para mediciones de microondas cuando no se pueden realizar estándares clásicos como terminaciones abiertas, cortas y coincidentes. Ahora hay una familia de técnicas relacionadas, aquí denotadas como métodos TxL, siendo la comunalidad la medición de dos puertos de una conexión pasante y de la misma estructura con una línea de transmisión insertada. Las conexiones de dos puertos requeridas en el procedimiento TRL se muestran en la Figura\(\PageIndex{5}\). El concepto detrás de la representación es que hay un error de medición que es capturado por
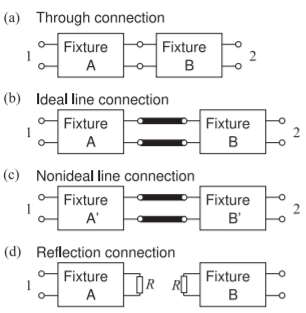
Figura\(\PageIndex{5}\): Conexiones de medición en calibración de dos puertos mediante el procedimiento TRL: (a) a través de la conexión; (b) conexión de línea ideal; (c) configuración realista con accesorios no idénticos; y (d) con reflexión arbitraria.
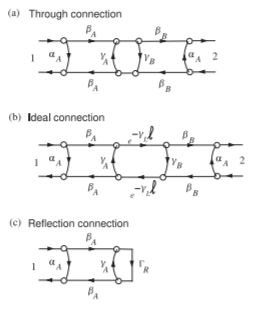
Figura\(\PageIndex{6}\): Representaciones SFG de las conexiones de dos puertos mostradas en la Figura\(\PageIndex{5}\): (a) a través de la conexión; (b) conexión de línea ideal; y (c) conexión de reflexión arbitraria.
el accesorio de dos puertos. El procedimiento TRL permite que los accesorios en ambos lados, los Fijaciones A y B aquí, tengan diferentes parámetros de dos puertos. Las representaciones SFG de las conexiones se muestran en la Figura\(\PageIndex{6}\). Suponiendo que los accesorios se reproducen fielmente cuando van de una conexión a otra, entonces los SFG mostrados en\(\PageIndex{6}\) (a—c) necesitan ser considerados. Con cada configuración, se realizan mediciones de dos puertos, y como el número de mediciones de\(S\) parámetros independientes supera el número de incógnitas, parecería que puede ser posible resolver los SFG para obtener los parámetros desconocidos de los accesorios. Esto es todo lo que se requiere para desincrustar mediciones realizadas con un DUT entre los accesorios. Desafortunadamente esto no es posible. Sin embargo, Engen y Hoer [3] desarrollaron un procedimiento que permitió extraer la compleja constante de propagación de la línea de las mediciones de\(S\) parámetros externos de las conexiones a través y línea. Este procedimiento se considera en la siguiente sección.
4.3.5 Calibración a través de línea
Las estructuras de medición de paso y línea incluyen accesorios, así como la conexión directa (para el paso) y la línea insertada (para la línea) (ver Figura\(\PageIndex{5}\)). Las mediciones de dos puertos de estas dos estructuras producen la constante\(\Gamma_{L} = \alpha +\jmath\beta\) de propagación de la línea [3]. Trabajos similares pero anteriores fueron presentados por Bianco et al. [12]. Para la estructura pasante, las redes de error entre el puerto interno ideal de un analizador de red y el plano de referencia de medición deseado se designan como Fixture\(\mathsf{A}\) at Port\(\mathsf{1}\) y Fixture\(\mathsf{B}\) at Port\(\mathsf{2}\). Para la medición de la línea, se restablece la fijación (siguiendo la medición pasante) con la línea insertada. En general, la fijación no se puede reproducir fielmente y por lo tanto se convierte en Fijaciones\(\mathsf{A}′\) y\(\mathsf{B}′\), respectivamente (ver Figura\(\PageIndex{5}\)).
Lo siguiente se basa en la derivación de Engen y Hoer [3]. Además de presentar un resultado importante que indica fuentes de error en la medición por microondas, el desarrollo demuestra una técnica para resolver problemas de medición que involucran líneas de transmisión.
El desarrollo comienza usando matrices en cascada, R, definidas como
\[\label{eq:12}\left[\begin{array}{c}{b_{1}}\\{a_{1}}\end{array}\right]=\mathbf{R}\left[\begin{array}{c}{a_{2}}\\{b_{2}}\end{array}\right] \]
que está relacionado con los parámetros de dispersión S por
\[\label{eq:13}\mathbf{R}=\left[\begin{array}{cc}{R_{11}}&{R_{12}}\\{R_{21}}&{R_{22}}\end{array}\right]=\left[\begin{array}{cc}{\frac{S_{12}S_{21}-S_{11}S_{22}}{S_{21}}}&{\frac{S_{11}}{S_{21}}} \\ {-\frac{S_{22}}{S_{21}}}&{\frac{1}{S_{21}}}\end{array}\right] \]
Así, los parámetros que describen los\(\mathsf{B}\) accesorios\(\mathsf{A}\) y son\(\mathbf{S}_{A},\: \mathbf{S}_{B}\) y\(\mathbf{R}_{A},\: \mathbf{R}_{B}\), respectivamente. La matriz en cascada del through es simplemente una matriz de unidad y la línea de longitud,\(\ell_{L}\), se describe por
\[\label{eq:14}\mathbf{R}_{L}=\left[\begin{array}{cc}{e^{-\gamma_{L}\ell_{L}}}&{0}\\{0}&{e^{\gamma_{L}\ell_{L}}}\end{array}\right] \]
La impedancia característica de la línea se toma como la impedancia de referencia,\(Z_{0}\), del sistema de medición y da como resultado los ceros fuera de diagonal en la definición anterior para el estándar de línea. Debido a esta suposición simplificadora, se\(\gamma_{L}\) puede calcular utilizando las ecuaciones que siguen.
La matriz en cascada de la estructura pasante (es decir, la cascada de fijación-accesorio) es
\[\label{eq:15}\mathbf{R}_{t}=\mathbf{R}_{A}\mathbf{R}_{B}\quad\text{(the through)} \]
Para la estructura de líneas,\(\Delta\) se introduce un error de fijación. \(\Delta\)corresponde a una pequeña longitud eléctrica adicional del\(\mathsf{A}\) accesorio (es decir,\(\mathbf{R}_{A}′ = \mathbf{R}_{A}\mathbf{R}_{e}\)), entonces la matriz en cascada de la cascada de fijación-línea-accesorio es
\[\label{eq:16}\mathbf{R}_{d} = \mathbf{R}'_{A}\mathbf{R}_{L}\mathbf{R}_{B} = \mathbf{R}_{A}\mathbf{R}_{e}\mathbf{R}_{L}\mathbf{R}_{B}\quad\text{(the line)}\quad\text{with}\quad\mathbf{R}_{e}=\left[\begin{array}{cc}{\text{e}^{-\Delta}}&{0}\\{0}&{\text{e}^{\Delta}}\end{array}\right] \]
Ahora introduce la matriz
\[\label{eq:17}\mathbf{T}=\left[\begin{array}{cc}{t_{11}}&{t_{12}}\\{t_{21}}&{t_{22}}\end{array}\right]=\mathbf{R}_{d}\mathbf{R}_{t}^{-1} \]
Así\(\mathbf{T}\) combina las mediciones de línea y paso y elimina aproximadamente la medición pasante de la medición de línea. Lo más importante es que todos los elementos de la\(\mathbf{T}\) matriz son cantidades medidas. Continuando (tenga en cuenta que si\(\mathbf{A}\) y\(\mathbf{B}\) son matrices,\((\mathbf{AB})^{−1} = \mathbf{B}^{−1}\mathbf{A}^{−1}\)), y usando Ecuaciones\(\eqref{eq:15}\) —\(\eqref{eq:17}\),
\[\begin{align}\mathbf{TR}_{A}&=\mathbf{R}_{d}\mathbf{R}_{t}^{−1}\mathbf{R}_{A} = \mathbf{R}'_{A} \mathbf{R}_{L}\mathbf{R}_{B}(\mathbf{R}_{A}\mathbf{R}_{B})^{−1}\mathbf{R}_{A}\nonumber \\ \label{eq:18}&=\mathbf{R}_{A}\mathbf{R}_{e}\mathbf{R}_{L}\mathbf{R}_{B}\mathbf{R}_{B}^{−1}\mathbf{R}_{A}^{−1}\mathbf{R}_{A}\end{align} \]
y así
\[\label{eq:19}\mathbf{TR}_{A}=\mathbf{R}_{A}\mathbf{R}_{e}\mathbf{R}_{L} \]
que se conoce como la ecuación TL (para línea pasante). La ampliación de la ecuación\(\eqref{eq:19}\) conduce a un sistema de ecuaciones:
\[\begin{align} \label{eq:20} t_{11}R_{A11} + t_{12}R_{A21} &= R_{A11}\text{e}^{−\Delta}\text{e}^{−\gamma_{L}\ell_{L}} \\ \label{eq:21} t_{21}R_{A11} + t_{22}R_{A21} &= R_{A21}\text{e}^{−\Delta}\text{e}^{−\gamma_{L}\ell_{L}} \\ \label{eq:22} t_{11}R_{A12} + t_{12}R_{A22} &= R_{A12}\text{e}^{\Delta}\text{e}^{\gamma_{L}\ell_{L}} \\ \label{eq:23} t_{21}R_{A12} + t_{22}R_{A22} &= R_{A22}\text{e}^{\Delta}e^{\gamma_{L}\ell_{L}} \end{align} \]
que tras la solución produce la constante de propagación del patrón de línea [3],
\[\begin{align}\label{eq:24}\gamma_{L}&=\frac{1}{2\ell_{L}}\left[\ln\left(\frac{t_{11}+t_{22}\pm\zeta}{t_{11}+t_{22}\mp\zeta}\right)-2\Delta\right] \\ \label{eq:25}\zeta&=(t_{11}^{2}-2t_{11} t_{22}+t_{22}^{2}+4t_{21}t_{12})^{1/2}\end{align} \]
Si los accesorios se reproducen fielmente, entonces las redes\(\mathsf{A}\) y\(\mathsf{A}'\) son idénticas, al igual que las redes\(\mathsf{B}\) y\(\mathsf{B}'\), y así\(\Delta=0\), y\(\gamma_{L}\) es
\[\label{eq:26}\gamma_{L}=\frac{1}{2\ell_{L}}\ln\left(\frac{t_{11}+t_{22}\pm\zeta}{t_{11}+t_{22}\mp\zeta}\right) \]
El signo a usar\(\zeta\) se elige correspondiente a la selección de raíz [3].
Es decir, las mediciones de\(S\) parámetros de dos puertos de la conexión pasante (mostrada en la Figura\(\PageIndex{5}\) (a)) y las mediciones de\(S\) parámetros de dos puertos de la conexión de línea\(\PageIndex{5}\) (mostradas en la Figura (b)) permiten determinar la constante de propagación de la línea. La impedancia característica del estándar de línea se puede determinar como se describe en la Sección 4.5.
La extracción de la constante de propagación del estándar de línea de transmisión es una propiedad común de las técnicas de calibración que utilizan mediciones a través y línea en lugar de mediciones de coincidencia. Dichas técnicas se denominan técnicas TxL, donde se\(\text{x}\) identifica una medición adicional utilizada en la calibración. Desafortunadamente, las técnicas de calibración TxL a menudo resultan en errores en la desincrustación en frecuencias donde la longitud del estándar de línea es un múltiplo de media longitud de onda (llamadas longitudes críticas [13, 14]). Estas son las longitudes donde la longitud eléctrica es un múltiplo de\(180^{\circ}\). Buff et al. [15, 16] mostraron que los pequeños errores de repetibilidad del aparato resultan en errores incorporados en\(\Delta\). Estos errores afectan a toda la calibración y las posteriores mediciones desincrustadas. Estos errores se minimizan mediante el uso de mediciones donde el estándar de línea tiene una longitud eléctrica no dentro\(20^{\circ}\) de una longitud crítica. Se han propuesto medias estadísticas y el uso de múltiples líneas para minimizar el error [17, 18], así como un esquema de optimización para determinar la longitud eléctrica adicional,\(\Delta\) [15, 16]. El esquema de optimización reduce significativamente la incertidumbre y se basa en la suposición de que un cambio de longitud de línea es la única fuente de error en la reproducibilidad del accesorio (el accesorio aquí incluye, por supuesto, la sonda y la almohadilla de sonda). Esto se ve en la Figura\(\PageIndex{7}\) donde los resultados de optimización se ven más claramente para la constante de atenuación en la Figura\(\PageIndex{7}\) (a), la curva etiquetada como error de accesorio desembebido. La curva sin error de fijación se seleccionó como los mejores resultados de un gran número de calibraciones (múltiples repeticiones de conexiones de almohadilla sonda sobre sonda). La curva de error del aparato es el resultado de una medición de calibración típica.
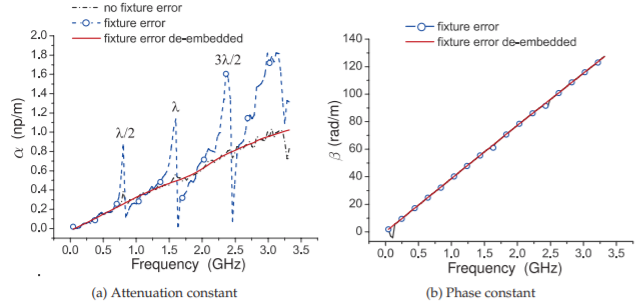
Figura\(\PageIndex{7}\): Constante de propagación extraída de los componentes de línea y pasante de TRL con error de fijación introducido durante la medición de línea.
A continuación, se describen varias de las técnicas de calibración TxL. Estas son técnicas incorporadas en la mayoría de los analizadores de redes vectoriales y son particularmente útiles en la caracterización de circuitos en chip. Un ejemplo de una medición de dos puertos en oblea se muestra en la Figura\(\PageIndex{8}\), que muestra los estándares de calibración en chip. El software VNA guía al usuario a través del conjunto requerido de mediciones de calibración y calcula los modelos de error que se utilizarán en la desincrustación.
A través de retardo corto
Las cargas emparejadas pueden ser difíciles de realizar, especialmente al sondear CI y circuitos planos usando sondas. El método de retardo corto (TSD) utiliza mediciones de reflexión y transmisión [19]. El retardo se realiza usando una línea con una impedancia\(50\:\Omega\) característica. TSD experimenta los\(180^{\circ}\) fallos comunes a los esquemas TxL. El paso podría ser otro retraso, pero luego ocurren problemas cuando la diferencia de retardo (la diferencia de longitud eléctrica) del paso y el retardo es un múltiplo entero de\(180^{\circ}\).
A través de Reflect
Lo que se conoce como la técnica de calibración de línea de reflexión pasante (TRL) fue desarrollada por Bianco et al. [12] y Engen y Hoer [3], quienes utilizaron una conexión pasante, un estándar de reflexión arbitraria y un estándar de retardo o línea. El estándar de línea puede ser de longitud arbitraria con su constante de propagación desconocida, pero se supone que no es reflectante. El resultado de esta suposición es que la impedancia característica de la línea se convierte en la impedancia de referencia del sistema. Además, el estándar de reflexión, puede ser cualquier carga de reflexión repetible, prefiriéndose una abierta o corta. Una vez más la línea de transmisión introduce incertidumbres de calibración cuando la eléctrica
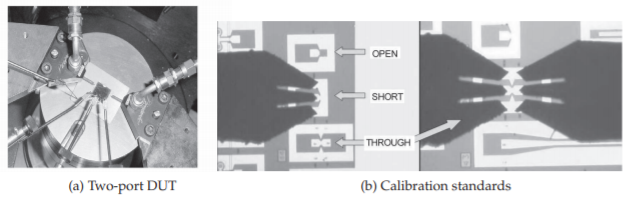
Figura\(\PageIndex{8}\): Mediciones de dos puertos: (a) dispositivo de dos puertos bajo prueba con sondas de aguja de CC en la parte inferior y sondas GSG a izquierda y derecha; y (b) estándares de calibración abiertos, cortos y pasantes con sondas GSG.
longitud es un múltiplo de media longitud de onda [3].
A través de Reflect
Through reflect match (TRM) es una variación de TRL que reemplaza el through por una carga coincidente y es útil solo cuando se puede realizar una carga coincidente. Conserva el estándar de reflexión arbitraria, lo cual es particularmente útil ya que puede ser difícil producir un corto o abierto con circuitos planos. Por ejemplo, una vía utilizada para realizar un cortocircuito de microcinta tiene resistencia e inductancia finitas y por lo tanto no crea un buen paso, sino que crea una reflexión arbitraria repetible útil. La técnica no tiene los fallos críticos de longitud, pero la fijación repetible siempre es importante.
Otras técnicas de calibración distribuida
TRL y TRM son los estándares más comúnmente aceptados utilizados en la calibración de mediciones de estructuras de circuitos planos. Hay varias otras técnicas relacionadas que también utilizan líneas de transmisión y son útiles en ciertas circunstancias.
En 1982 Benet [20] desarrolló la técnica de calibración abierta-corta-cinco líneas de compensación. El concepto clave es que el desplazamiento múltiple a través de líneas traza un círculo en el gráfico de Smith y el centro del círculo proporciona la carga coincidente. Mediante el ajuste de mínimos cuadrados Benet derivó la constante de propagación de las líneas pasantes y los términos de error restantes para desarrollar el modelo de error de 12 términos.
Pennock et al. [21] introdujeron el sistema de calibración de doble vía (DTL) en 1987. Esto es útil para caracterizar transiciones entre diferentes medios. Hay suficiente información para desarrollar el modelo de error de 6 términos. La calibración SOLT (carga de apertura corta) requiere estándares caracterizados con precisión y es robusta para\(20\text{ GHz}\).
La calibración SOLR (corto-abierto-carga-reciprocal-through) es similar a SOLT usando estándares de reflexión definidos con precisión como estándar.
LMRM, (línea-reflect-reflect-coincidencia) calibración utiliza una línea en lugar de un paso, uno de los estándares de reflexión es un corto y el otro es un abierto. Esto es
Figura\(\PageIndex{9}\): Procedimiento de calibración de dos niveles.
generalmente la mejor técnica de calibración para usar con sondas, ya que estos estándares son sencillos de incorporar en sustratos de calibración. Los estándares de calibración son los mismos que los utilizados en SOLT, pero LRM no requiere estándares cortos y abiertos de precisión. Lo esencial de lo que se debe conocer son las características del paso y la resistencia de CC de uno de los estándares de carga. La inductancia de la carga se determina automáticamente.
La calibración LRM (carga-reflect-coincidencia) es similar a la calibración LRRM pero no utiliza un estándar de reflexión de precisión. Una modificación es LRM+, para lo cual se requieren las resistencias de CC de las cargas.
4.3.6 Calibración de dos niveles
Con las mediciones en sistemas no coaxiales, es difícil producir estándares de precisión como cortocircuitos, aperturas y cargas resistivas. En estas situaciones, a veces se utiliza la calibración de dos niveles. En un procedimiento de calibración de dos niveles, se utilizan dos conjuntos de estándares para establecer planos de referencia de primer y segundo nivel (ver Figura\(\PageIndex{9}\)). Es preferible usar un conjunto de estándares altamente repetibles en Tier\(\mathsf{1}\) (como una técnica no TXL), y uno que produzca una caracterización más precisa en un entorno particular (como una técnica TxL para la medición en oblea).
En la calibración de primer nivel, normalmente se utiliza un conjunto de estándares de precisión. Esto se puede lograr usando estándares coaxiales o quizás un sustrato de calibración estándar usado con sondas. Haciendo referencia a la Figura\(\PageIndex{9}\), se establece cada uno de los\(\mathsf{2}\) dos puertos desde los planos de referencia internos del analizador de red hasta los planos de referencia externos. Generalmente con el segundo nivel, se utilizan estándares de calibración insitu, y la fijación adicional (por ejemplo, en chip) es idéntica para los dos puertos. La calibración de precisión debe realizarse utilizando estándares fabricados en el medio del DUT.
La calibración de dos niveles generalmente da como resultado que los accesorios en el segundo nivel sean idénticos. Esto permite realizar comprobaciones de la integridad de la conexión de la sonda. Las conexiones a las almohadillas IC pueden ser problemáticas debido a la acumulación de óxido, especialmente con almohadillas de aluminio. Por lo tanto, asegurar la simetría de las calibraciones de segundo nivel comparando las mediciones de dos puertos de estructuras simétricas como las líneas de transmisión puede reducir en gran medida el impacto de los errores inducidos por el accesorio discutidos en la Sección 4.3.5 Recordemos que pequeños errores de fijación, como bajar las sondas en posiciones ligeramente diferentes,
Figura\(\PageIndex{10}\): Conexiones de medición en calibración de segundo nivel de dos puertos mediante el procedimiento de calibración TL: (a) a través de la conexión; (b) conexión de línea ideal; (c) configuración realista que muestra que los accesorios no se reproducen con precisión; y (d) configuración de reflexión arbitraria.
da como resultado errores de medición en las frecuencias de media longitud de onda (\(\lambda/2,\:\lambda,\: 3\lambda /2,\)etc.). Por ejemplo, si el DUT es un dispositivo sobre una oblea de silicio, la técnica de medición óptima es realizar los estándares de calibración en la oblea de silicio procesada de la misma manera que para el DUT. El procedimiento de calibración de dos niveles elimina los errores de fijación asociados con los efectos de flecos en las sondas y con otras no dealidades involucradas en la creación de las plataformas de aterrizaje para las sondas.
En un ejemplo de esquema de calibración de dos niveles, se utiliza un primer nivel para establecer el modelo de error de 12 términos. Después se utiliza una segunda calibración para desarrollar un modelo de error secundario de seis términos, como en la Figura\(\PageIndex{4}\) (a) con\(S_{12} = S_{21}\). En tal situación, los estándares utilizados en el desarrollo del modelo de error de 12 términos normalmente incluirían una carga abierta, una corta y una carga coincidente. Estos no necesitan ser estándares precisos. Por lo tanto, el modelo de error de 12 términos no necesita ser preciso, y este modelo no sufre los errores de media longitud de onda de las técnicas TxL.
Simetría de línea a través
Para mediciones planas usando sondas, la calibración de primer nivel usando un sustrato de calibración estándar es hasta el final de las puntas de la sonda, y los errores con el uso de otros sustratos (por ejemplo, las almohadillas de sonda son de diferente tamaño o la permitividad del sustrato es diferente) serán comunes a ambas sondas (accesorios) en un puerto de dos puertos medición. Con un diseño cuidadoso, los accesorios empleados en el segundo nivel serán idénticos y tendrán los mismos\(S\) parámetros. En la calibración de segundo nivel, las mediciones de un paso y una línea serán simétricas con\(S_{11} = S_{22}\) y\(S_{12} = S_{21}\). Esta simetría se explota en la técnica de línea pasante (TL) que explota la simetría y hace que los errores de media longitud de onda de TxL sean insignificantes [4, 5]. Las conexiones de calibración TL en la calibración de segundo nivel se muestran en la Figura\(\PageIndex{10}\). En el primer nivel de calibración, se desarrolla un modelo de error de 12 términos usando abierto, corto, carga y retardo. En consecuencia, no hay fallas de media longitud de onda que ocurren cuando se usan estándares de línea de transmisión. En el segundo nivel de calibración, las sondas se utilizan con dos longitudes de línea de transmisión fabricadas en el mismo sustrato que el DUT. Una de las líneas se convierte en un paso.
El procedimiento procede calculando la constante de propagación de la línea utilizando la técnica desarrollada para el procedimiento TRL (Ecuación\(\eqref{eq:26}\)). Hay simetría de fijación en las conexiones TL (ver Figura\(\PageIndex{10}\)) y esto se refleja en las representaciones SFG de las conexiones como se muestra en la Figura\(\PageIndex{11}\). Como se mostrará, esta simetría permite la reflexión arbitraria utilizada

Figura\(\PageIndex{11}\): Representaciones SFG de las conexiones de dos puertos mostradas en la Figura\(\PageIndex{10}\).
en el procedimiento TRL para ser reemplazado por un cortocircuito virtual preciso o circuito abierto. Deje que los\(S\) parámetros de Fixture\(\mathsf{A}\) sean\(\alpha = S_{11},\:\beta = S_{12} = S_{21}\), y\(\gamma = S_{22}\). Usando estos parámetros con la inversión de puerto requerida para modelar el Fixture at Port\(\mathsf{2}\), el SFG mostrado en la Figura\(\PageIndex{11}\) (a) relaciona los\(S\) parámetros medidos con los parámetros de los accesorios. El coeficiente de reflexión de entrada de Fixture\(\mathsf{A}\) con un cortocircuito colocado en el puerto\(\mathsf{2}\) de\(\mathsf{A}\) es
\[\label{eq:27}\rho_{\text{sc}}=\alpha-\frac{\beta^{2}}{1+\gamma} \]
Deje que los\(S\) parámetros medidos de la conexión pasante sean designados por un superíndice inicial\(T\). El uso de la regla de bucle automático (o de Mason) con el SFG en la Figura\(\PageIndex{11}\) (a) relaciona los\(S\) parámetros medidos con los parámetros de fijación:
\[\label{eq:28}^{T}S_{11}=\alpha+\frac{\beta^{2}\gamma}{1-\gamma^{2}}\quad\text{and}\quad\:^{T}S_{21}=\frac{\beta^{2}}{1-\gamma^{2}} \]
Restar estas expresiones rinde
\[\begin{align}^{T}S_{11}-\:^{T}S_{21}&=\alpha+\frac{\beta^{2}\gamma}{1-\gamma^{2}}-\frac{\beta^{2}}{1-\gamma^{2}}=\alpha+\frac{\beta^{2}\gamma-\beta^{2}}{(1-\gamma)(1+\gamma)}\nonumber \\ \label{eq:29}&=\alpha-\frac{\beta^{2}(1-\gamma)}{(1-\gamma)(1+\gamma)}=\alpha-\frac{\beta^{2}}{1+\gamma}=\rho_{\text{sc}}\end{align} \]
Es decir, el coeficiente de reflexión de entrada de un dispositivo terminado en un cortocircuito ideal virtual se puede obtener a partir de la medición pasante de los accesorios consecutivos en la configuración pasante:
\[\label{eq:30}\rho_{\text{sc}}=\:^{T}S_{11}-\:^{T}S_{21} \]
Se obtienen resultados similares para un circuito abierto ideal virtual colocado en el Puerto\(\mathsf{2}\) de Fixture\(\mathsf{A}\):
\[\label{eq:31}\rho_{\text{oc}}=\:^{T}S_{11}+\:^{T}S_{21} \]
Por lo tanto, es posible insertar eficazmente circuitos abiertos y cortocircuitos ideales dentro de un medio no insertable.
Notas al pie
[1] Obsérvese que existen varias\(\mathbf{T}\) matrices, por lo que es necesario ser específicas.