
2.6: Ecuaciones diferenciales y de diferencia de segundo orden
- Page ID
- 82152

Con nuestra comprensión de las funciones\(e^x\)\(e^{jΘ}\), y la ecuación cuadrática\(z^2 + \frac b a z + \frac c a =0\), podemos emprender un estudio rudimentario de ecuaciones diferenciales y de diferencia.
Ecuaciones diferenciales
En tu estudio de circuitos y sistemas te encontrarás con la ecuación diferencial homogénea
\[\frac {d^2} {dt^2} x(t)+a_1\frac d {dt} x(t)+a_2=0 \nonumber \]
Debido a que la función se\(e^{st}\) reproduce bajo diferenciación, es plausible suponer que x (t) =est es una solución a la ecuación diferencial. Vamos a probarlo:
\[\frac {d^2} {dt^2}(e^{st})+a_1\frac d {dt}(e^{st})+a_2(e^{st})=0 \nonumber \]
\[(s^2+a_1s+a_2)e^{st}=0 \nonumber \]
Si esta ecuación va a ser satisfecha para todos\(t\), entonces el polinomio in\(s\) debe ser cero. Por lo tanto requerimos
\[s^2+a_1s+a_2=0 \nonumber \]
Como sabemos por nuestro estudio de esta ecuación cuadrática, las soluciones son
\[s_{1,2}=−\frac {a_1} 2 ± \frac 1 2 \sqrt{a^2_1−4a_2} \nonumber \]
Esto significa que nuestra supuesta solución funciona, siempre\(s=s_1\) o\(s_2\). Es un resultado fundamental de la teoría de ecuaciones diferenciales que la solución más general para x (t) sea una combinación lineal de estas soluciones asumidas:
\[x(t)=A_1e^{s_1t}+A_2e^{s_2t} \nonumber \]
Si\(a^2_1−4a_2\) es menor que cero, entonces las raíces\(s_1\) y\(s_2\) son complejas:
\[s_{1,2}=−\frac {a_1} 2 ± j\frac 1 2 \sqrt{4a_2−a^2_1} \nonumber \]
Vamos a reescribir esta solución como
\[s_{1,2}=σ±jω \nonumber \]
donde σ y ω son las constantes
\[σ=−\frac {a_1} 2 \nonumber \]
\[ω=\frac 1 2 \sqrt{4a_2−a^2_1} \nonumber \]
Con esta notación, la solución para x (t) es
\[x(t)=A_1e^{σt}e^{jωt}+A_2e^{σt}e^{−jωt} \nonumber \]
Si esta solución va a ser real, entonces los dos términos del lado derecho deben ser conjugados complejos. Esto significa que\(A_2=A^∗_1\) y la solución para x (t) es
\[x(t)=A_1e^{σt}e^{jωt}+A^∗_1e^{σt}e^{−Jωt} = 2\mathrm{Re} \{A_1e^{σt} e^{jωt}\} \nonumber \]
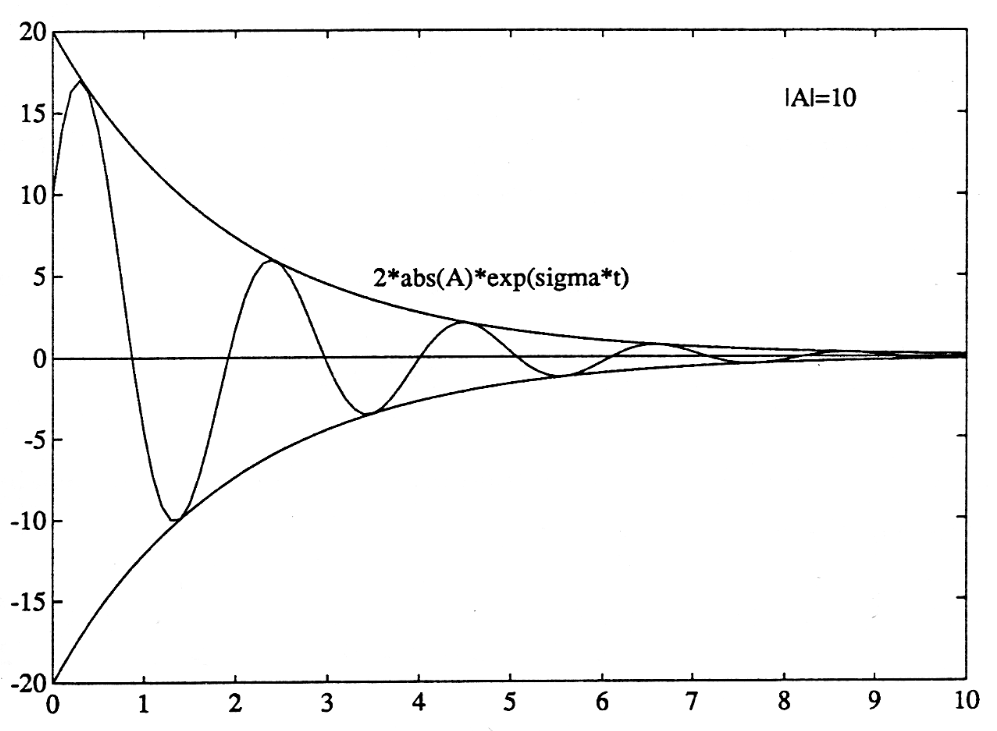
La constante\(A_1\) puede escribirse como\(A_1=|A|e^{jφ}\). Entonces la solución para x (t) es
\[x(t)=2|A|e^{σt}\cos(ωt+φ) \nonumber \]
Esta “solución cosinusoidal amortiguada” se ilustra en la Figura.
Encuentre las soluciones generales a las siguientes ecuaciones diferenciales:
a.\(\frac {d^2} {dt^2} X(t)+2\frac d {dt} x(t)+2=0\)
b.\(\frac {d^2} {dt^2} x(t)+2\frac d {dt} x(t)−2=0\)
c.\(\frac {d^2} {dt^2} x(t)+2=0\)
Ecuaciones de diferencia
En tu estudio de filtros digitales encontrarás ecuaciones de diferencia homogéneas de la forma
\[x_n+a_1x_n−1+a_2x_{n−2}=0 \nonumber \]
Lo que esto significa es que la secuencia\(\{x_n\}\) obedece a una recursión homogénea:
\[x_n=−a_1x_{n−1}−a_2x_{n−2} \nonumber \]
Una suposición plausible a una solución es la secuencia geométrica\(x_n=z^n\). Con esta suposición, la ecuación de diferencia produce el resultado
\[z^n+a_1z^n−1+a_2z^{n−2}=0 \nonumber \]
\[(1+a_1z^{−1}+a_2z^{−2})z^n=0 \nonumber \]
Si esta suposición va a funcionar, entonces el polinomio de segundo orden en el lado izquierdo debe ser igual a cero:
\[1+a_1z^{−1}+a_2z^{−2}=0 \nonumber \]
\[z^2+a_1z+a_2=0 \nonumber \]
Las soluciones son
\[z_{1,2}=−\frac {a_1} 2 ± j\frac 1 2 \sqrt{4a_2−a^2_1} = re^{jθ} \nonumber \]
La solución general a la ecuación de diferencia es una combinación lineal de las soluciones asumidas:
\[x_n=A_1z^n_1+A_2(z^∗_1)^n \nonumber \]
\[=A_1z^n_1+A^∗_1(z^∗_1) \nonumber \]
\[=2\mathrm{Re}{A_1z^n_1} \nonumber \]
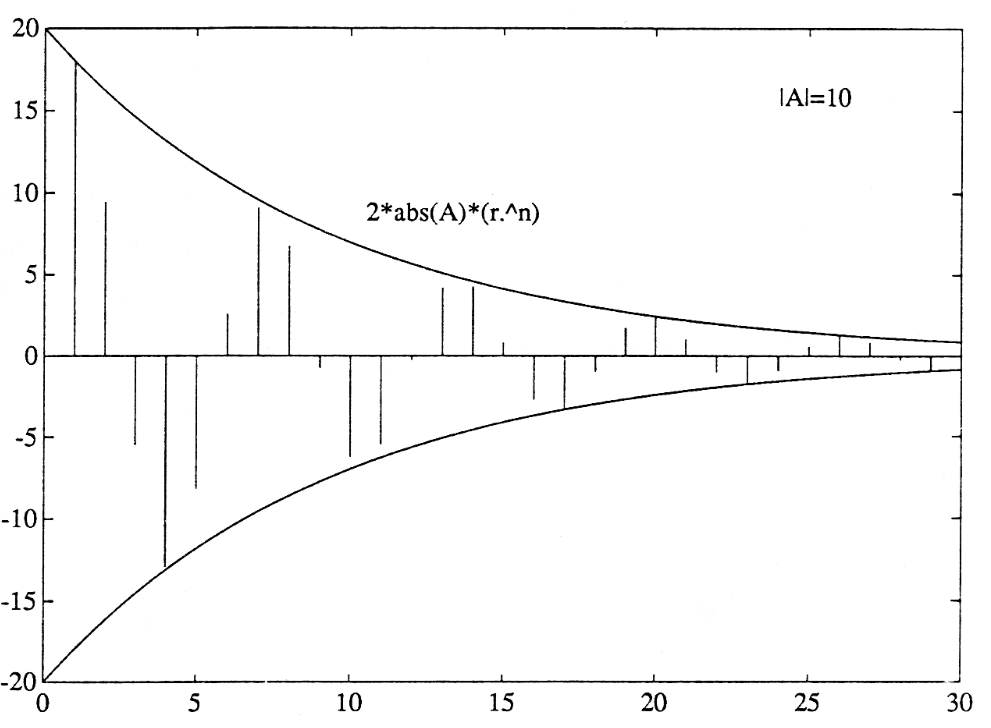
\[=2|A|r^n\cos(θn+φ) \nonumber \]
Esta solución general se ilustra en la Figura.
Encuentre las soluciones generales a las siguientes ecuaciones de diferencia:
a. x_n+2x_ {n−1} +2=0
b. x_n−2x_ {n−1} +2=0
c. x_n+2x_ {n−2} =0