
2.3: Ejemplo
- Page ID
- 115153

Supongamos que tenemos tres objetos en una viga balanceada. También supongamos que sabemos que uno tiene una masa de 2 kg, y queremos encontrar las dos masas desconocidas. La experimentación con una barra medidora (supongamos que no tiene peso) produce estas dos balanzas. (diagrama no a escala)
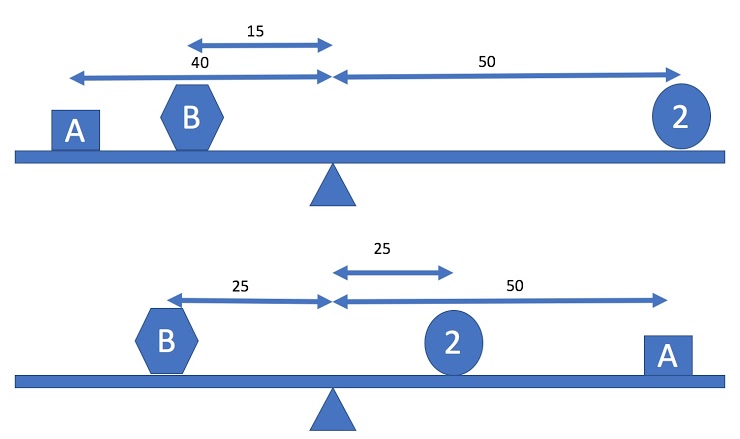
Para que las masas se equilibren debemos tener la suma de los momentos a la izquierda igual a la suma de los momentos de la derecha, donde el momento de un objeto es su masa multiplicada por su distancia del punto de equilibrio. Eso da un sistema de dos ecuaciones:
\[ 40A + 15B = 50 \times 2 \nonumber \]
\[ 25B = 25 \times 2 + 50A \nonumber \]
Encuentre una solución para los sistemas de ecuaciones anteriores y coloque su solución en la siguiente celda. Asegúrese de eliminar primero el texto instructivo en la celda.
Usando Python como calculadora, verifica que la solución que has encontrado es correcta.
Ahora consideremos un sistema donde tenemos tres masas desconocidas en lugar de dos. La experimentación con una varilla medidora produce los dos estados equilibrados que se muestran a continuación (diagrama no a escala). Escribe las ecuaciones para este sistema.
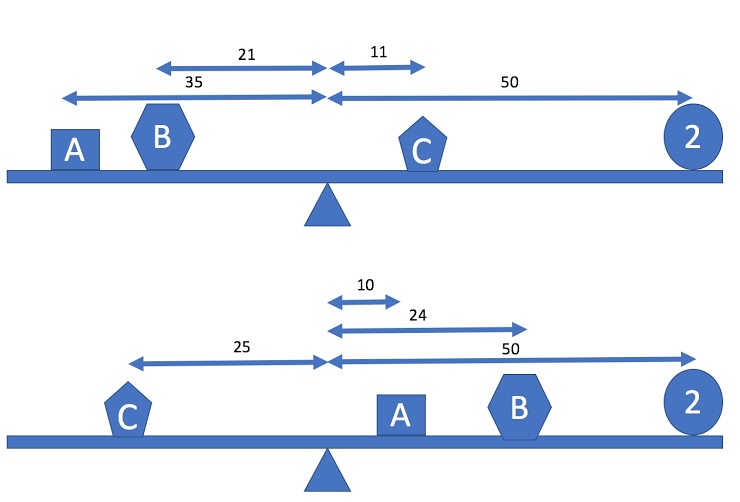
Encuentre una solución al segundo conjunto de ecuaciones y reporte la masa de los objetos A, B y C.
Usando Python como calculadora, verifica que la solución que has encontrado es correcta.