
14.2: Transformaciones afín
- Page ID
- 115233

En esta sección, vamos a explorar diferentes tipos de matrices de transformación. El siguiente código está diseñado para demostrar las propiedades de algunas matrices de transformación diferentes.
Revisa el siguiente código.
# Define some points
x = [0.0, 0.0, 2.0, 8.0, 10.0, 10.0, 8.0, 4.0, 3.0, 3.0, 4.0, 6.0, 7.0, 7.0, 10.0,
10.0, 8.0, 2.0, 0.0, 0.0, 2.0, 6.0, 7.0, 7.0, 6.0, 4.0, 3.0, 3.0, 0.0]
y = [0.0, -2.0, -4.0, -4.0, -2.0, 2.0, 4.0, 4.0, 5.0, 7.0, 8.0, 8.0, 7.0, 6.0, 6.0,
8.0, 10.0, 10.0, 8.0, 4.0, 2.0, 2.0, 1.0, -1.0, -2.0, -2.0, -1.0, 0.0, 0.0]
con = [ 1.0 for i in range(len(x))]
p = np.matrix([x,y,con])
mp = p.copy()
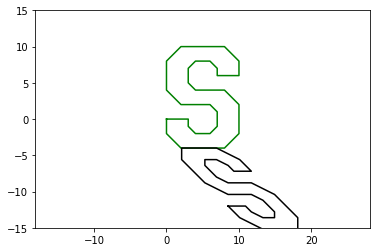
#Plot Points
plt.plot(mp[0,:].tolist()[0],mp[1,:].tolist()[0], color='green');
plt.axis('scaled');
plt.axis([-10,20,-15,15]);
plt.title('Start Location');

Ejemplo de matriz de escalado
Ejemplo de Matriz de Traducción
Ejemplo de matriz de reflexión
Ejemplo de matriz de rotación
Ejemplo de matriz de cizallamiento
Combinar Transformas
Tenemos cinco transformaciones\(R\),\(S\)\(T\),\(Re\), y\(SH\)
Construir una (\(3 \times 3\)) Matriz de transformación (llamada\(M\)) que combina estas cinco transformaciones en una sola matriz. Puedes elegir diferentes órdenes para estas cinco matrices, luego comparar tu resultado con otros alumnos.
¿Se pudo obtener el mismo resultado con otros? Se puede comparar la matriz\(M\) para ver la diferencia. Si no, ¿puedes explicar por qué sucede?
Ejemplo Interactivo
También se puede usar el siguiente comando pero puede ser lento en las computadoras de algunas personas.
Usando el ambiente interactivo anterior para ver si puedes averiguar la matriz de transformación para hacer la siguiente imagen:
¿Cuáles son los valores de entrada?