
12.3: El Producto Dot
- Page ID
- 116120

- Calcular el producto puntual de dos vectores dados.
- Determinar si dos vectores dados son perpendiculares.
- Encuentra los cosenos de dirección de un vector dado.
- Explique qué se entiende por la proyección vectorial de un vector sobre otro vector, y describa cómo calcularlo.
- Calcular el trabajo realizado por una fuerza determinada.
Si aplicamos una fuerza a un objeto para que el objeto se mueva, decimos que el trabajo lo realiza la fuerza. Anteriormente, miramos una fuerza constante y asumimos que la fuerza se aplicaba en la dirección del movimiento del objeto. Bajo esas condiciones, el trabajo puede expresarse como el producto de la fuerza que actúa sobre un objeto y la distancia que mueve el objeto. En este capítulo, sin embargo, hemos visto que tanto la fuerza como el movimiento de un objeto pueden ser representados por vectores.
En esta sección, desarrollamos una operación llamada el producto punto, que nos permite calcular el trabajo en el caso en que el vector de fuerza y el vector de movimiento tengan diferentes direcciones. El producto punto esencialmente nos dice cuánto del vector de fuerza se aplica en la dirección del vector de movimiento. El producto punto también puede ayudarnos a medir el ángulo formado por un par de vectores y la posición de un vector con respecto a los ejes de coordenadas. Incluso proporciona una prueba simple para determinar si dos vectores se encuentran en ángulo recto.
El producto Dot y sus propiedades
Ya hemos aprendido a sumar y restar vectores. En este capítulo, investigamos dos tipos de multiplicación vectorial. El primer tipo de multiplicación vectorial se llama producto punto, basado en la notación que usamos para ello, y se define de la siguiente manera:
El punto producto de vectores\(\vecs{ u}=⟨u_1,u_2,u_3⟩\) y\(\vecs{ v}=⟨v_1,v_2,v_3⟩\) viene dado por la suma de los productos de los componentes
\[\vecs{ u}⋅\vecs{ v}=u_1v_1+u_2v_2+u_3v_3. \nonumber \]
Tenga en cuenta que si\(u\) y\(v\) son vectores bidimensionales, calculamos el producto de punto de manera similar. Por lo tanto, si\(\vecs{ u}=⟨u_1,u_2⟩\) y\(\vecs{ v}=⟨v_1,v_2⟩,\) entonces
\[\vecs{ u}⋅\vecs{ v}=u_1v_1+u_2v_2. \nonumber \]
Cuando se combinan dos vectores bajo suma o resta, el resultado es un vector. Cuando se combinan dos vectores usando el producto punto, el resultado es un escalar. Por esta razón, el producto punto a menudo se llama el producto escalar. También se le puede llamar el producto interno.
- Encuentra el producto punto de\(\vecs{ u}=⟨3,5,2⟩\) y\(\vecs{ v}=⟨−1,3,0⟩\).
- Encuentre el producto escalar de\(\vecs{ p}=10\hat{\textbf i}−4 \hat{\textbf j}+7 \hat{\textbf k}\) y\(\vecs{ q}=−2\hat{\textbf i}+\hat{\textbf j}+6\hat{\textbf k}.\)
Solución:
a. Sustituir los componentes del vector en la fórmula para el producto punto:
\[ \begin{align*} \vecs{ u}⋅\vecs{ v} &=u_1v_1+u_2v_2+u_3v_3 \\[4pt] &=3(−1)+5(3)+2(0) \\[4pt] &=−3+15+0 \\[4pt] &=12. \end{align*}\]
b. El cálculo es el mismo si los vectores se escriben usando vectores unitarios estándar. Todavía tenemos tres componentes para cada vector para sustituir en la fórmula para el producto punto:
\[ \begin{align*} \vecs{ p}⋅\vecs{ q} &=p_1q_1+p_2q_2+p_3q_3 \\[4pt] &=10(−2)+(−4)(1)+(7)(6) \\[4pt] &=−20−4+42 \\[4pt] &=18.\end{align*}\]
Buscar\(\vecs{ u}⋅\vecs{ v}\), dónde\(\vecs{ u}=⟨2,9,−1⟩\) y\(\vecs{ v}=⟨−3,1,−4⟩.\)
- Pista
-
Multiplique los componentes correspondientes y luego agregue sus productos.
- Contestar
-
\(7\)
Al igual que la suma y resta de vectores, el producto de punto tiene varias propiedades algebraicas. Demostramos tres de estas propiedades y dejamos el resto como ejercicios.
Dejar\(\vecs{ u}\),\(\vecs{ v}\), y\(\vecs{ w}\) ser vectores, y dejar\(c\) ser un escalar.
- Propiedad conmutativa\[\vecs{ u}⋅\vecs{ v}=\vecs{ v}⋅\vecs{ u} \nonumber \]
- Propiedad distributiva\[\vecs{ u}⋅(\vecs{ v}+\vecs{ w})=\vecs{ u}⋅\vecs{ v}+\vecs{ u}⋅\vecs{ w} \nonumber \]
- Propiedad asociativa\[c(\vecs{ u}⋅\vecs{ v})=(c\vecs{ u})⋅\vecs{ v}=\vecs{ u}⋅(c\vecs{ v}) \nonumber \]
- Propiedad de magnitud\[\vecs{ v}⋅\vecs{ v}=\|\vecs{ v}\|^2 \nonumber \]
Deja\(\vecs{ u}=⟨u_1,u_2,u_3⟩\) y\(\vecs{ v}=⟨v_1,v_2,v_3⟩.\) luego
\[ \begin{align*} \vecs{ u}⋅\vecs{ v} &=⟨u_1,u_2,u_3⟩⋅⟨v_1,v_2,v_3⟩ \\[4pt] &=u_1v_1+u_2v_2+u_3v_3 \\[4pt] &= v_1u_1+v_2u_2+v_3u_3 \\[4pt] &= ⟨v_1,v_2,v_3⟩⋅⟨u_1,u_2,u_3⟩ \\[4pt] &=\vecs{ v}⋅\vecs{ u}.\end{align*}\]
La propiedad asociativa se parece a la propiedad asociativa para la multiplicación de números reales, pero preste mucha atención a la diferencia entre objetos escalar y vectoriales:
\[ \begin{align*} c(\vecs{ u}⋅\vecs{ v}) &=c(u_1v_1+u_2v_2+u_3v_3) \\[4pt] &=c(u_1v_1)+c(u_2v_2)+c(u_3v_3) \\[4pt] &=(cu_1)v_1+(cu_2)v_2+(cu_3)v_3 \\[4pt] &=⟨cu_1,cu_2,cu_3⟩⋅⟨v_1,v_2,v_3⟩ \\[4pt] &=c⟨u_1,u_2,u_3⟩⋅⟨v_1,v_2,v_3⟩ \\[4pt] &=(c\vecs{ u})⋅\vecs{ v}.\end{align*}\]
La prueba que\(c(\vecs{ u}⋅\vecs{ v})=\vecs{ u}⋅(c\vecs{ v})\) es similar.
La cuarta propiedad muestra la relación entre la magnitud de un vector y su producto punto consigo mismo:
\[ \begin{align*} \vecs{ v}⋅\vecs{ v} &=⟨v_1,v_2,v_3⟩⋅⟨v_1,v_2,v_3⟩\\[4pt] &=(v_1)^2+(v_2)^2+(v_3)^2 \\[4pt] &=\left[\sqrt{(v_1)^2+(v_2)^2+(v_3)^2}\right]^2 \\[4pt] &=\|\vecs{ v}\|^2.\end{align*}\]
□
Tenga en cuenta que la definición del producto punto rinde\(\vecs{ 0}⋅\vecs{ v}=0.\) Por propiedad iv. si\(\vecs{ v}⋅\vecs{ v}=0,\) entonces\(\vecs{ v}=\vecs{ 0}.\)
Vamos\(\vecs{ a}=⟨1,2,−3⟩\),\(\vecs{ b}=⟨0,2,4⟩\), y\( \vecs{ c} =⟨5,−1,3⟩\).
Encuentra cada uno de los siguientes productos.
- \(( \vecs{ a} ⋅ \vecs{ b}) \vecs{ c} \)
- \(\vecs{ a}⋅(2\vecs{ c})\)
- \(\|\vecs{ b}\|^2\)
Solución
a. Tenga en cuenta que esta expresión pide el múltiplo escalar de\(\vecs{ c}\) by\(\vecs{ a}⋅\vecs{ b}\):
\[ \begin{align*} (\vecs{ a}⋅\vecs{ b})\vecs{ c} &=(⟨1,2,−3⟩⋅⟨0,2,4⟩)⟨5,−1,3⟩ \\[4pt] &=(1(0)+2(2)+(−3)(4))⟨5,−1,3⟩ \\[4pt] &=−8⟨5,−1,3⟩ \\[4pt] &= ⟨−40,8,−24⟩.\end{align*}\]
b. Esta expresión es un producto de punto de vector\(\vecs{ a}\) y múltiple escalar 2\(\vecs{ c}\):
\[ \begin{align*} \vecs{ a}⋅(2\vecs{ c}) &=2(\vecs{ a}⋅\vecs{ c}) \\[4pt] &=2(⟨1,2,−3⟩⋅⟨5,−1,3⟩) \\[4pt] &=2(1(5)+2(−1)+(−3)(3)) \\[4pt] &=2(−6)=−12.\end{align*}\]
c. Simplificar esta expresión es una aplicación directa del producto punto:
\[ \begin{align*} \|\vecs{ b}\|^2 &=\vecs{ b}⋅\vecs{ b} \\[4pt] &=⟨0,2,4⟩⋅⟨0,2,4⟩\\[4pt] &=0^2+2^2+4^2\\[4pt] &=0+4+16\\[4pt] &=20.\end{align*}\]
Encuentre los siguientes productos para\(\vecs{ p}=⟨7,0,2⟩\),\(\vecs{ q}=⟨−2,2,−2⟩\), y\(\vecs{ r}=⟨0,2,−3⟩\).
- \((\vecs{ r}⋅\vecs{ p})\vecs{ q}\)
- \(\|\vecs{ p}\|^2\)
- Pista
-
\(\vecs{ r}⋅\vecs{ p}\)es un escalar.
- Contestar
-
\(a. \quad (\vecs{ r}⋅\vecs{ p})\vecs{ q}=⟨12,−12,12⟩; \quad b. \quad \|\vecs{ p}\|^2=53\)
Uso del producto Dot para encontrar el ángulo entre dos vectores
Cuando dos vectores distintos de cero se colocan en posición estándar, ya sea en dos dimensiones o tres dimensiones, forman un ángulo entre ellos (Figura\(\PageIndex{1}\)). El producto de punto proporciona una manera de encontrar la medida de este ángulo. Esta propiedad es el resultado de que podemos expresar el producto punto en términos del coseno del ángulo formado por dos vectores.
El producto punto de dos vectores es el producto de la magnitud de cada vector y el coseno del ángulo entre ellos:
\[\vecs{ u}⋅\vecs{ v}=‖\vecs{ u}‖‖\vecs{ v}‖\cos θ. \label{evaldot} \]
Colocar vectores\(\vecs{ u}\) y\(\vecs{ v}\) en posición estándar y considerar el vector\(\vecs{ v}−\vecs{ u}\) (Figura\(\PageIndex{2}\)). Estos tres vectores forman un triángulo con longitudes laterales\(‖\vecs{ u}‖,‖\vecs{ v}‖\), y\(‖\vecs{ v}−\vecs{ u}‖\).
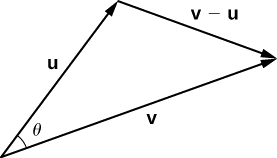
Recordemos de la trigonometría que la ley de los cosenos describe la relación entre las longitudes laterales del triángulo y el ángulo\(θ\). Aplicando la ley de cosenos aquí da
\[‖\vecs{ v}−\vecs{ u}‖^2=‖\vecs{ u}‖^2+‖\vecs{ v}‖^2−2‖\vecs{ u}‖‖\vecs{ v}‖\cos θ. \label{eq20} \]
El producto punto proporciona una manera de reescribir el lado izquierdo de la ecuación\ ref {eq20}:
\[ \begin{align*} ‖\vecs{ v}−\vecs{ u}‖^2 &=(\vecs{ v}−\vecs{ u})⋅(\vecs{ v}−\vecs{ u}) \\[4pt] &=(\vecs{ v}−\vecs{ u})⋅\vecs{ v}−(\vecs{ v}−\vecs{ u})⋅\vecs{ u} \\[4pt] &=\vecs{ v}⋅\vecs{ v}−\vecs{ u}⋅\vecs{ v}−\vecs{ v}⋅\vecs{ u}+\vecs{ u}⋅\vecs{ u} \\[4pt] &=\vecs{ v}⋅\vecs{ v}−\vecs{ u}⋅\vecs{ v}−\vecs{ u}⋅\vecs{ v}+\vecs{ u}⋅\vecs{ u} \\[4pt] &=‖\vecs{ v}‖^2−2\vecs{ u}⋅\vecs{ v}+‖\vecs{ u}‖^2.\end{align*}\]
Sustituir en la ley de los rendimientos de los cosenos
\[ \begin{align*} ‖\vecs{ v}−\vecs{ u}‖^2 &=‖\vecs{ u}‖^2+‖\vecs{ v}‖^2−2‖\vecs{ u}‖‖\vecs{ v}‖\cos θ \\[4pt] ‖\vecs{ v}‖^2−2\vecs{ u}⋅\vecs{ v}+‖\vecs{ u}‖^2 &= ‖\vecs{ u}‖^2+‖\vecs{ v}‖^2−2‖\vecs{ u}‖‖\vecs{ v}‖\cos θ \\[4pt] −2\vecs{ u}⋅\vecs{ v} &=−2‖\vecs{ u}‖‖\vecs{ v}‖\cos θ \\[4pt] \vecs{ u}⋅\vecs{ v} &=‖\vecs{ u}‖‖\vecs{ v}‖\cos θ. \end{align*}\]
□
Podemos usar la forma del producto punto en la Ecuación\ ref {evaldot} para encontrar la medida del ángulo entre dos vectores distintos de cero reordenando la Ecuación\ ref {evaldot} para resolver para el coseno del ángulo:
\[\cos θ=\dfrac{\vecs{ u}⋅\vecs{ v}}{‖\vecs{ u}‖‖\vecs{ v}‖}. \label{dot2} \]
Usando esta ecuación, podemos encontrar el coseno del ángulo entre dos vectores distintos de cero. Ya que estamos considerando el ángulo más pequeño entre los vectores, asumimos\(0°≤θ≤180°\) (o\(0≤θ≤π\) si estamos trabajando en radianes). El coseno inverso es único en este rango, por lo que entonces somos capaces de determinar la medida del ángulo\(θ\).
Encuentra la medida del ángulo entre cada par de vectores.
- \(\mathbf{\hat i} + \mathbf{\hat j} + \mathbf{\hat k}\)y\(2\mathbf{\hat i} – \mathbf{\hat j} – 3\mathbf{\hat k}\)
- \(⟨2,5,6⟩\)y\(⟨−2,−4,4⟩\)
Solución
a. Para encontrar el coseno del ángulo formado por los dos vectores, sustituya los componentes de los vectores en Ecuación\ ref {dot2}:
\[ \begin{align*} \cos θ &=\dfrac{(\mathbf{\hat i}+\mathbf{\hat j}+\mathbf{\hat k})⋅(2\mathbf{\hat i}−\mathbf{\hat j}−3\mathbf{\hat k})}{∥\mathbf{\hat i}+\mathbf{\hat j}+\mathbf{\hat k}∥⋅∥2\mathbf{\hat i}−\mathbf{\hat j}−3\mathbf{\hat k}∥} \\[4pt] &=\dfrac{1(2)+(1)(−1)+(1)(−3)}{\sqrt{1^2+1^2+1^2}\sqrt{2^2+(−1)^2+(−3)^2}} \\[4pt] &=\dfrac{−2}{\sqrt{3}\sqrt{14}} =\dfrac{−2}{\sqrt{42}}. \end{align*}\]
Por lo tanto,\(θ=\arccos\dfrac{−2}{\sqrt{42}}\) rad.
b. Comience por encontrar el valor del coseno del ángulo entre los vectores:
\[ \begin{align*} \cos θ &=\dfrac{⟨2,5,6⟩⋅⟨−2,−4,4⟩}{∥⟨2,5,6⟩∥⋅∥⟨−2,−4,4⟩∥} \\[4pt] &=\dfrac{2(−2)+(5)(−4)+(6)(4)}{\sqrt{2^2+5^2+6^2}\sqrt{(−2)^2+(−4)^2+4^2}} \\[4pt] &=\dfrac{0}{\sqrt{65}\sqrt{36}}=0.\end{align*}\]
Ahora,\(\cos θ=0\) y\(0≤θ≤π\), entonces\(θ=π/2\).
Encuentra la medida del ángulo, en radianes, formado por vectores\(\vecs{ a}=⟨1,2,0⟩\) y\(\vecs{ b}=⟨2,4,1⟩\). Redondear a la centésima más cercana.
- Pista
-
Usa la Ecuación\ ref {dot2}.
- Contestar
-
\(θ≈0.22\)rad
El ángulo entre dos vectores puede ser agudo\((0<\cos θ<1),\) obtuso\((−1<\cos θ<0)\) o recto\((\cos θ=−1)\). Si\(\cos θ=1\), entonces ambos vectores tienen la misma dirección. Si\(\cos θ=0\), entonces los vectores, cuando se colocan en posición estándar, forman un ángulo recto (Figura\(\PageIndex{3}\)). Podemos formalizar este resultado en un teorema respecto a los vectores ortogonales (perpendiculares).
Los vectores distintos de cero\(\vecs{u}\) y\(\vecs{v}\) son vectores ortogonales si y solo si\(\vecs{u}⋅\vecs{v}=0.\)
Dejar\(\vecs{u}\) y\(\vecs{v}\) ser vectores distintos de cero, y dejar\(θ\) denotar el ángulo entre ellos. Primero, supongamos\(\vecs{u}⋅\vecs{v}=0.\) Entonces
\[‖\vecs{u}‖‖\vecs{v}‖\cos θ=0. \nonumber \]
Sin embargo,\(‖\vecs{u}‖≠0\) y\(‖\vecs{v}‖≠0,\) así debemos tener\(\cos θ=0\). De ahí,\(θ=90°\), y los vectores son ortogonales.
Ahora asumamos\(\vecs{u}\) y\(\vecs{v}\) son ortogonales. Entonces\(θ=90°\) y tenemos
\[ \begin{align*} \vecs{u}⋅\vecs{v} &=‖\vecs{ u}‖‖\vecs{ v}‖\cos θ \\[4pt] &=‖\vecs{ u}‖‖\vecs{ v}‖\cos 90° \\[4pt] &=‖\vecs{ u}‖‖\vecs{ v}‖(0) \\[4pt] &=0. \end{align*}\]
□
Los términos ortogonal, perpendicular y normal indican cada uno que los objetos matemáticos se cruzan en ángulo recto. El uso de cada término está determinado principalmente por su contexto. Decimos que los vectores son ortogonales y las líneas son perpendiculares. El término normal se usa con mayor frecuencia cuando se mide el ángulo realizado con un plano u otra superficie.
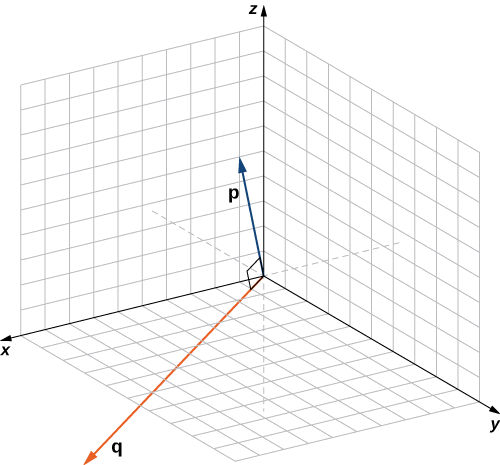
Determinar si\(\vecs{p}=⟨1,0,5⟩\) y\(\vecs{q}=⟨10,3,−2⟩\) son vectores ortogonales.
Solución
Usando la definición, solo necesitamos verificar el producto punto de los vectores:
\[ \vecs{ p}⋅\vecs{ q}=1(10)+(0)(3)+(5)(−2)=10+0−10=0. \nonumber \]
Porque\(\vecs{p}⋅\vecs{q}=0,\) los vectores son ortogonales (Figura\(\PageIndex{4}\)).
¿Para qué valor de\(x\) es\(\vecs{ p}=⟨2,8,−1⟩\) ortogonal a\(\vecs{ q}=⟨x,−1,2⟩\)?
- Pista
-
Los vectores\(\vecs{ p}\) y\(\vecs{ q}\) son ortogonales si y solo si\(\vecs{ p}⋅\vecs{ q}=0\).
- Contestar
-
\(x=5\)
Vamos\(\vecs{ v}=⟨2,3,3⟩.\) Encuentra las medidas de los ángulos formados por los siguientes vectores.
- \(\vecs{ v}\)y\(\mathbf{\hat i}\)
- \(\vecs{ v}\)y\(\mathbf{\hat j}\)
- \(\vecs{ v}\)y\(\mathbf{\hat k}\)
Solución
a.Que α sea el ángulo formado por\(\vecs{ v}\) y\(\mathbf{\hat i}\):
\[ \begin{align*} \cos{α} &=\dfrac{\vecs{ v}⋅\mathbf{\hat i}}{‖\vecs{ v}‖⋅\|\mathbf{\hat i}\|}=\dfrac{⟨2,3,3⟩⋅⟨1,0,0⟩}{\sqrt{2^2+3^2+3^2}\sqrt{1}}=\dfrac{2}{\sqrt{22}} \\[4pt] α &=\arccos\dfrac{2}{\sqrt{22}}≈1.130\,\text{rad.} \end{align*}\]
b. Que β represente el ángulo formado por\(\vecs{ v}\) y\(\mathbf{\hat j}\):
\[ \begin{align*} \cos{β} &=\dfrac{\vecs{ v}⋅\mathbf{\hat j}}{‖\vecs{ v}‖⋅\|\mathbf{\hat j}\|}=\dfrac{⟨2,3,3⟩⋅⟨0,1,0⟩}{\sqrt{2^2+3^2+3^2}\sqrt{1}}=\dfrac{3}{\sqrt{22}} \\[4pt] β &=\arccos\dfrac{3}{\sqrt{22}}≈0.877\,\text{rad.} \end{align*}\]
c. Que γ represente el ángulo formado por\(\vecs{ v}\) y\(\mathbf{\hat k}\):
\[ \begin{align*} \cos{γ} &=\dfrac{\vecs{ v}⋅\mathbf{\hat k}}{‖\vecs{ v}‖⋅\|\mathbf{\hat k}\|}=\dfrac{⟨2,3,3⟩⋅⟨0,0,1⟩}{\sqrt{2^2+3^2+3^2}\sqrt{1}}=\dfrac{3}{\sqrt{22}} \\[4pt]γ &=\arccos\dfrac{3}{\sqrt{22}}≈0.877\,\text{rad.} \end{align*}\]
Vamos\(\vecs{ v}=⟨3,−5,1⟩.\) Encuentra la medida de los ángulos formados por cada par de vectores.
- \(\vecs{ v}\)y\(\mathbf{\hat i}\)
- \(\vecs{ v}\)y\(\mathbf{\hat j}\)
- \(\vecs{ v}\)y\(\mathbf{\hat k}\)
- Pista
-
\(\mathbf{\hat i}=⟨1,0,0⟩, \mathbf{\hat j}=⟨0,1,0⟩,\)y\(\mathbf{\hat k}=⟨0,0,1⟩\)
- Contestar
-
\(a. α≈1.04\)rad; b.\(β≈2.58\) rad; c.\(γ≈1.40\) rad
El ángulo que hace un vector con cada uno de los ejes de coordenadas, llamado ángulo de dirección, es muy importante en cálculos prácticos, especialmente en un campo como la ingeniería. Por ejemplo, en la ingeniería astronáutica, se debe determinar con mucha precisión el ángulo en el que se lanza un cohete. Un error muy pequeño en el ángulo puede llevar a que el cohete vaya a cientos de kilómetros fuera de rumbo. Los ángulos de dirección a menudo se calculan usando el producto de punto y los cosenos de los ángulos, llamados cosenos de dirección. Por lo tanto, definimos tanto estos ángulos como sus cosenos.
Los ángulos formados por un vector distinto de cero y los ejes de coordenadas se denominan ángulos de dirección para el vector (Figura\(\PageIndex{5}\)). Los cosenos para estos ángulos se denominan cosenos de dirección.
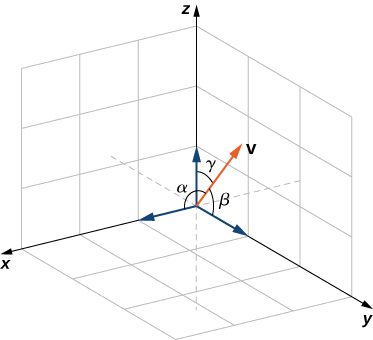
En Ejemplo\(\PageIndex{5}\), la dirección cosenos de\(\vecs{ v}=⟨2,3,3⟩\) son\(\cos α=\dfrac{2}{\sqrt{22}}, \cos β=\dfrac{3}{\sqrt{22}},\) y\(\cos γ=\dfrac{3}{\sqrt{22}}\). Los ángulos de dirección de\(\vecs{ v}\) son\(α=1.130\)\(β=0.877\) rad, rad y\(γ=0.877\) rad.
Hasta el momento, nos hemos centrado principalmente en vectores relacionados con la fuerza, el movimiento y la posición en el espacio físico tridimensional. Sin embargo, los vectores se utilizan a menudo de formas más abstractas. Por ejemplo, supongamos que un vendedor de frutas vende manzanas, plátanos y naranjas. En un día dado, vende 30 manzanas, 12 plátanos y 18 naranjas. Podría usar un vector de cantidad,\(\vecs{ q}=⟨30,12,18⟩,\) para representar la cantidad de fruta que vendió ese día. De igual manera, podría querer usar un vector de precio,\(\vecs{ p}=⟨0.50,0.25,1⟩,\) para indicar que vende sus manzanas por 50¢ cada una, plátanos por 25¢ cada una y naranjas por $1 cada una. En este ejemplo, aunque todavía podríamos graficar estos vectores, no los interpretamos como representaciones literales de posición en el mundo físico. Simplemente estamos usando vectores para realizar un seguimiento de piezas particulares de información sobre manzanas, plátanos y naranjas.
Esta idea puede parecer un poco extraña, pero si simplemente consideramos a los vectores como una forma de ordenar y almacenar datos, encontramos que pueden ser una herramienta bastante poderosa. Volviendo al vendedor de frutas, pensemos en el producto punto,\(\vecs{ q}⋅\vecs{ p}\). Lo calculamos multiplicando el número de manzanas vendidas (30) por el precio por manzana (50¢), el número de plátanos vendidos por el precio por plátano y el número de naranjas vendidas por el precio por naranja. Después sumamos todos estos valores juntos. Entonces, en este ejemplo, el producto punto nos dice cuánto dinero tenía el vendedor de frutas en ventas ese día en particular.
Cuando usamos vectores de esta manera más general, no hay razón para limitar el número de componentes a tres. ¿Y si el vendedor de frutas decide comenzar a vender pomelo? En ese caso, querría utilizar vectores cuatridimensionales de cantidad y precio para representar el número de manzanas, plátanos, naranjas y pomelos vendidos, y sus precios unitarios. Como cabría esperar, para calcular el producto puntual de vectores de cuatro dimensiones, simplemente agregamos los productos de los componentes como antes, pero la suma tiene cuatro términos en lugar de tres.
Tienda de suministros para fiestas AAA vende invitaciones, favores de fiesta, decoraciones y artículos de servicio de alimentos como platos de papel y servilletas. Cuando AAA compra su inventario, paga 25¢ por paquete por invitaciones y favores de fiesta. Las decoraciones cuestan 50¢ AAA cada una y los artículos de servicio de alimentos cuestan 20¢ por paquete. AAA vende invitaciones por $2.50 por paquete y favores de fiesta por $1.50 por paquete. Las decoraciones se venden por $4.50 cada una y los artículos de servicio de alimentos por $1.25 por paquete.
Durante el mes de mayo, Tienda de Suministros para Fiestas AAA vende 1258 invitaciones, 342 favores de fiesta, 2426 decoraciones y 1354 artículos de servicio de comida. Usa vectores y productos punteados para calcular cuánto dinero hizo AAA en ventas durante el mes de mayo. ¿Cuánto obtuvo la tienda en ganancias?
Solución
Los vectores de costo, precio y cantidad son
\[ \begin{align*} \vecs{ c} &=⟨0.25,0.25,0.50,0.20⟩ \\[4pt] \vecs{ p} &=⟨2.50,1.50,4.50,1.25⟩ \\[4pt] \vecs{ q} &=⟨1258,342,2426,1354⟩. \end{align*}\]
Las ventas AAA para el mes de mayo se pueden calcular utilizando el producto dot\(\vecs{ p}⋅\vecs{ q}\). Tenemos
\[ \begin{align*} \vecs{ p}⋅\vecs{ q} &=⟨2.50,1.50,4.50,1.25⟩⋅⟨1258,342,2426,1354⟩ \\[4pt] &=3145+513+10917+1692.5 \\[4pt] &= 16267.5. \end{align*}\]
Entonces, AAA se llevó 16.267.50 dólares durante el mes de mayo. Para calcular el beneficio, primero debemos calcular cuánto pagó AAA por los artículos vendidos. Utilizamos el producto dot\(\vecs{c}⋅\vecs{q}\) para obtener
\[ \begin{align*} \vecs{ c}⋅\vecs{ q} &=⟨0.25,0.25,0.50,0.20⟩⋅⟨1258,342,2426,1354⟩ \\[4pt] &=314.5+85.5+1213+270.8 \\[4pt] &=1883.8. \end{align*}\]
Entonces, AAA pagó $1,883.80 por los artículos que vendieron. Su beneficio, entonces, viene dado por
\[\vecs{ p}⋅\vecs{ q}−\vecs{ c}⋅\vecs{ q}=16267.5−1883.8 =14383.7. \nonumber \]
Por lo tanto, AAA Party Supply Store hizo $14,383.70 en mayo.
El 1 de junio, Tienda de Suministros para Fiestas AAA decidió aumentar el precio que cobran por favores de fiesta a $2 por paquete. También cambiaron de proveedor para sus invitaciones, y ahora pueden comprar invitaciones por solo 10¢ por paquete. Todos sus demás costos y precios siguen siendo los mismos. Si AAA vende 1408 invitaciones, 147 favores de fiesta, 2112 decoraciones y 1894 artículos de servicio de alimentos en el mes de junio, utilice vectores y productos punteados para calcular sus ventas totales y ganancias para junio.
- Pista
-
Utilice vectores de cuatro dimensiones para el costo, el precio y la cantidad vendida.
- Contestar
-
Ventas = $15.685.50; ganancia = $14.073.15
Proyecciones
Como hemos visto, la adición combina dos vectores para crear un vector resultante. Pero, ¿y si nos dan un vector y necesitamos encontrar sus partes componentes? Utilizamos proyecciones vectoriales para realizar el proceso opuesto; pueden descomponer un vector en sus componentes. La magnitud de una proyección vectorial es una proyección escalar. Por ejemplo, si un niño está tirando del asa de un vagón en un ángulo de 55°, podemos usar proyecciones para determinar qué parte de la fuerza sobre el mango está moviendo realmente el vagón hacia adelante (\(\PageIndex{6}\)). Volvemos a este ejemplo y aprendemos a resolverlo después de ver cómo calcular proyecciones.
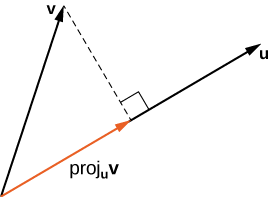
La proyección vectorial de\(\vecs{ v}\) sobre\(\vecs{ u}\) es el vector etiquetado\(\text{proj}_\vecs{ u}\vecs{ v}\) en la Figura\(\PageIndex{7}\). Tiene el mismo punto inicial que\(\vecs{ u}\) y\(\vecs{ v}\) y la misma dirección que\(\vecs{ u}\), y representa el componente de\(\vecs{ v}\) que actúa en la dirección de\(\vecs{ u}\). Si\(θ\) representa el ángulo entre\(\vecs{ u}\) y\(\vecs{ v}\), entonces, por las propiedades de los triángulos, sabemos la longitud de\(\text{proj}_\vecs{ u}\vecs{ v}\) es\(\|\text{proj}_\vecs{ u}\vecs{ v}\|=‖\vecs{ v}‖\cos θ.\) Cuando se expresa\(\cos θ\) en términos del producto punto, esto se convierte
\[ \|\text{proj}_\vecs{ u}\vecs{ v}\|=‖\vecs v‖\cos θ=‖\vecs{ v}‖\left(\dfrac{\vecs{ u}⋅\vecs{ v}}{‖\vecs{ u}‖‖\vecs{ v}‖}\right)=\dfrac{\vecs{ u}⋅\vecs{ v}}{‖\vecs{ u}‖.} \nonumber \]
Ahora multiplicamos por un vector unitario en la dirección de\(\vecs{ u}\) para obtener\(\text{proj}_\vecs{ u}\vecs{ v}\):
\[\text{proj}_\vecs{ u}\vecs{ v}=\dfrac{\vecs{ u}⋅\vecs{ v}}{‖\vecs{ u}‖}\left(\dfrac{1}{‖\vecs{ u}‖}\vecs{ u}\right)=\dfrac{\vecs{ u}⋅\vecs{ v}}{‖\vecs{ u}‖^2}\vecs{ u}. \nonumber \]
La longitud de este vector también se conoce como la proyección escalar de\(\vecs{ v}\) sobre\(\vecs{ u}\) y se denota por
\[\|\text{proj}_\vecs{ u}\vecs{ v}\|=\text{comp}_\vecs{ u}\vecs{ v}=\dfrac{\vecs{ u}⋅\vecs{ v}}{‖\vecs{ u}‖.} \nonumber \]
Encuentra la proyección de\(\vecs{ v}\) sobre\(\vecs{ u}\).
- \(\vecs{v}=⟨3,5,1⟩\)y\(\vecs{u}=⟨−1,4,3⟩\)
- \(\vecs{v}=3\mathbf{\hat i}−2\mathbf{\hat j}\)y\(\vecs{u}=\mathbf{\hat i}+6\mathbf{\hat j}\)
Solución
a. Sustituir los componentes de\(\vecs{ v}\) y\(\vecs{ u}\) en la fórmula para la proyección:
\[\begin{align*} \text{proj}_\vecs{ u}\vecs{ v} &=\dfrac{\vecs{ u}⋅\vecs{ v}}{‖\vecs{ u}‖^2}\vecs{ u} \\[4pt] &=\dfrac{⟨−1,4,3⟩⋅⟨3,5,1⟩}{∥⟨−1,4,3⟩∥^2}⟨−1,4,3⟩ \\[4pt] &=\dfrac{−3+20+3}{(−1)^2+4^2+3^2}⟨−1,4,3⟩ \\[4pt] &=\dfrac{20}{26}⟨−1,4,3⟩ \\[4pt] &=⟨−\dfrac{10}{13},\dfrac{40}{13},\dfrac{30}{13}⟩. \end{align*}\]
b. Para encontrar la proyección bidimensional, simplemente adapte la fórmula al caso bidimensional:
\[\begin{align*} \text{proj}_\vecs{ u}\vecs{ v} &=\dfrac{\vecs{ u}⋅\vecs{ v}}{‖\vecs{ u}‖^2}\vecs{ u} \\[4pt] &=\dfrac{(\mathbf{\hat i}+6\mathbf{\hat j})⋅(3\mathbf{\hat i}−2\mathbf{\hat j})}{∥\mathbf{\hat i}+6\mathbf{\hat j}∥^2}(\mathbf{\hat i}+6\mathbf{\hat j}) \\[4pt] &= \dfrac{1(3)+6(−2)}{1^2+6^2}(\mathbf{\hat i}+6\mathbf{\hat j}) \\[4pt] &= −\dfrac{9}{37}(\mathbf{\hat i}+6\mathbf{\hat j}) \\[4pt] &= −\dfrac{9}{37}\mathbf{\hat i}−\dfrac{54}{37}\mathbf{\hat j}.\end{align*}\]
A veces es útil descomponer vectores, es decir, romper un vector en una suma. Este proceso se llama la resolución de un vector en componentes. Las proyecciones nos permiten identificar dos vectores ortogonales que tienen una suma deseada. Por ejemplo, let\(\vecs{ v}=⟨6,−4⟩\) y let\(\vecs{ u}=⟨3,1⟩.\) Queremos descomponer el vector\(\vecs{ v}\) en componentes ortogonales de tal manera que uno de los vectores componentes tenga la misma dirección que\(\vecs{ u}\).
Primero encontramos el componente que tiene la misma dirección que\(\vecs{ u}\) proyectando\(\vecs{ v}\) sobre\(\vecs{ u}\). Vamos\(\vecs{ p}=\text{proj}_\vecs{ u}\vecs{ v}\). Entonces, tenemos
\[\begin{align*}\vecs{ p} =\dfrac{\vecs{ u}⋅\vecs{ v}}{‖\vecs{ u}‖^2}\vecs{ u} \\[4pt] = \dfrac{18−4}{9+1}\vecs{ u} \\[4pt] = \dfrac{7}{5}\vecs{ u}=\dfrac{7}{5}⟨3,1⟩=⟨\dfrac{21}{5},\dfrac{7}{5}⟩. \end{align*}\]
Ahora considera el vector\(\vecs{ q}=\vecs{ v}−\vecs{ p}.\) Tenemos
\[\begin{align*} \vecs{ q} =\vecs{ v}−\vecs{ p} \\[4pt] = ⟨6,−4⟩−⟨\dfrac{21}{5},\dfrac{7}{5}⟩ \\[4pt] = ⟨\dfrac{9}{5},−\dfrac{27}{5}⟩. \end{align*}\]
Claramente, por la forma en que definimos\(\vecs{ q}\), tenemos\(\vecs{ v}=\vecs{ q}+\vecs{ p},\) y
\[\begin{align*}\vecs{ q}⋅\vecs{ p} =⟨\dfrac{9}{5},−\dfrac{27}{5}⟩⋅⟨\dfrac{21}{5},\dfrac{7}{5}⟩ \\[4pt] = \dfrac{9(21)}{25}+−\dfrac{27(7)}{25} \\[4pt] = \dfrac{189}{25}−\dfrac{189}{25}=0. \end{align*}\]
Por lo tanto,\(\vecs{ q}\) y\(\vecs{ p}\) son ortogonales.
Expresar\(\vecs{ v}=⟨8,−3,−3⟩\) como una suma de vectores ortogonales de tal manera que uno de los vectores tenga la misma dirección que\(\vecs{ u}=⟨2,3,2⟩.\)
Solución
Dejar\(\vecs{ p}\) representar la proyección de\(\vecs{ v}\) sobre\(\vecs{ u}\):
\[ \begin{align*} \vecs{ p} &=\text{proj}_\vecs{ u}\vecs{ v} \\[4pt] &=\dfrac{\vecs{ u}⋅\vecs{ v}}{‖\vecs{ u}‖^2}\vecs{ u} \\[4pt] &=\dfrac{⟨2,3,2⟩⋅⟨8,−3,−3⟩}{∥⟨2,3,2⟩∥^2}⟨2,3,2⟩ \\[4pt] &=\dfrac{16−9−6}{2^2+3^2+2^2}⟨2,3,2⟩ \\[4pt] &=\dfrac{1}{17}⟨2,3,2⟩ \\[4pt] &=⟨\dfrac{2}{17},\dfrac{3}{17},\dfrac{2}{17}⟩. \end{align*} \nonumber \]
Entonces,
\[ \begin{align*} \vecs{ q} &=\vecs{ v}−\vecs{ p}=⟨8,−3,−3⟩−⟨\dfrac{2}{17},\dfrac{3}{17},\dfrac{2}{17}⟩\\[4pt] &=⟨\dfrac{134}{17},−\dfrac{54}{17},−\dfrac{53}{17}⟩. \end{align*} \nonumber \]
Para comprobar nuestro trabajo, podemos utilizar el producto punto para verificar que\(\vecs{ p}\) y\(\vecs{ q}\) son vectores ortogonales:
\[ \begin{align*}\vecs{ p}⋅\vecs{ q}&=⟨\dfrac{2}{17},\dfrac{3}{17},\dfrac{2}{17}⟩⋅⟨\dfrac{134}{17},−\dfrac{54}{17},−\dfrac{53}{17}⟩\\[4pt] &=\dfrac{268}{289}−\dfrac{162}{289}−\dfrac{106}{289}=0. \end{align*} \nonumber \]
Entonces,
\[\vecs{ v}=\vecs{ p}+\vecs{ q}=⟨\dfrac{2}{17},\dfrac{3}{17},\dfrac{2}{17}⟩+⟨\dfrac{134}{17},−\dfrac{54}{17},−\dfrac{53}{17}⟩. \nonumber \]
Expresar\(\vecs{ v}=5\mathbf{\hat i}−\mathbf{\hat j}\) como una suma de vectores ortogonales de tal manera que uno de los vectores tenga la misma dirección que\(\vecs{ u}=4\mathbf{\hat i}+2\mathbf{\hat j}\).
- Pista
-
Comience por encontrar la proyección de\(\vecs{ v}\) sobre\(\vecs{ u}\).
- Contestar
-
\(\vecs{ v}=\vecs{ p}+\vecs{ q},\)dónde\(\vecs{ p}=\dfrac{18}{5}\mathbf{\hat i}+\dfrac{9}{5}\mathbf{\hat j}\) y\(\vecs{ q}=\dfrac{7}{5}\mathbf{\hat i}−\dfrac{14}{5}\mathbf{\hat j}\)
Un buque portacontenedores sale del puerto viajando\(15°\) al norte del este. Su motor genera una velocidad de 20 nudos a lo largo de esa trayectoria (ver la siguiente figura). Además, la corriente oceánica mueve el barco hacia el noreste a una velocidad de 2 nudos. Considerando tanto el motor como la corriente, ¿qué tan rápido se mueve la nave en dirección\(15°\) norte de oriente? Redondear la respuesta a dos decimales.
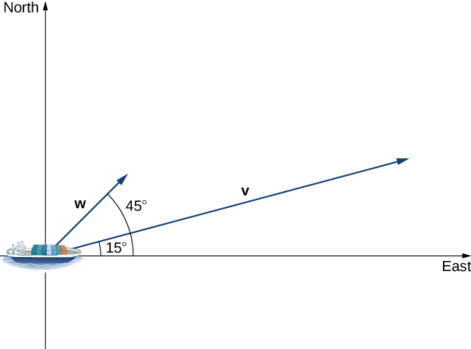
Solución
Dejar\(\vecs{ v}\) ser el vector de velocidad generado por el motor, y dejar\(\vecs{w}\) ser el vector de velocidad de la corriente. Ya sabemos\(‖\vecs{ v}‖=20\) a lo largo de la ruta deseada. Solo necesitamos agregar en la proyección escalar de\(\vecs{ w}\) onto\(\vecs{ v}\). Obtenemos
\[ \begin{align*} \text{comp}_\vecs{ v}\vecs{ w}=\dfrac{\vecs{ v}⋅\vecs{ w}}{‖\vecs{ v}‖} \\[4pt] =\dfrac{‖\vecs{ v}‖‖\vecs{ w}‖\cos(30°)}{‖\vecs{ v}‖} =‖\vecs{ w}‖\cos(30°) =2\dfrac{\sqrt{3}}{2}=\sqrt{3}≈1.73\,\text{knots.}\end{align*}\]
El buque se mueve a 21.73 nudos en dirección\(15°\) norte de oriente.
Repita el ejemplo anterior, pero supongamos que la corriente oceánica se mueve hacia el sureste en lugar de noreste, como se muestra en la siguiente figura.
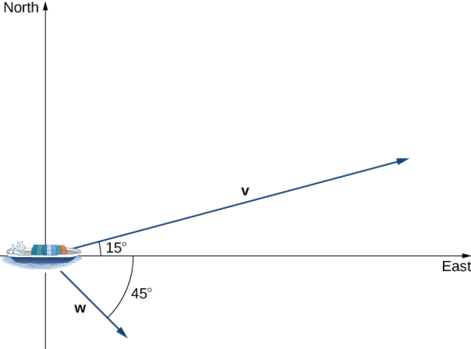
- Pista
-
Calcular la proyección escalar de\(\vecs{ w}\) sobre\(\vecs{ v}\).
- Contestar
-
21 nudos
Trabajo
Ahora que entendemos los productos punto, podemos ver cómo aplicarlos a situaciones de la vida real. La aplicación más común del producto punto de dos vectores está en el cálculo del trabajo.
Desde la física, sabemos que el trabajo se realiza cuando un objeto es movido por una fuerza. Cuando la fuerza es constante y se aplica en la misma dirección que el objeto se mueve, entonces definimos el trabajo realizado como producto de la fuerza y la distancia que recorre el objeto:\(W=Fd\). Vimos varios ejemplos de este tipo en capítulos anteriores. Ahora imagina que la dirección de la fuerza es diferente a la dirección del movimiento, como ocurre con el ejemplo de un niño tirando de un vagón. Para encontrar el trabajo realizado, necesitamos multiplicar el componente de la fuerza que actúa en la dirección del movimiento por la magnitud del desplazamiento. El producto dot nos permite hacer precisamente eso. Si representamos una fuerza aplicada por un vector\(\vecs{ F}\) y el desplazamiento de un objeto por un vector\(\vecs{ s}\), entonces el trabajo realizado por la fuerza es el punto producto de\(\vecs{ F}\) y\(\vecs{ s}\).
Cuando se aplica una fuerza constante a un objeto para que el objeto se mueva en línea recta de punto\(P\) a punto\(Q\), el trabajo\(W\) realizado por la fuerza\(\vecs{ F}\), actuando en un ángulo θ desde la línea de movimiento, viene dado por
\[W=\vecs{ F}⋅\vecd{PQ}=∥\vecs{ F}∥∥\vecd{PQ}∥\cos θ. \nonumber \]
Revisemos el problema de la carreta del niño introducida anteriormente. Supongamos que un niño está tirando de un vagón con una fuerza que tiene una magnitud de 8 lb en el mango en un ángulo de 55°. Si el niño tira del vagón 50 pies, encuentre el trabajo realizado por la fuerza (Figura\(\PageIndex{8}\)).
Tenemos
\[W=∥\vecs{ F}∥∥\vecd{PQ}∥\cos θ=8(50)(\cos(55°))≈229\,\text{ft⋅lb.} \nonumber \]
En unidades estándar de Estados Unidos, medimos la magnitud de la fuerza\(∥\vecs{ F}∥\) en libras. La magnitud del vector de desplazamiento nos\(∥\vecd{PQ}∥\) dice hasta qué punto se movió el objeto, y se mide en pies. La unidad de medida habitual para el trabajo, entonces, es el pie-libra. Un pie de libra es la cantidad de trabajo requerida para mover un objeto que pesa 1 lb a una distancia de 1 pie en línea recta hacia arriba. En el sistema métrico, la unidad de medida para la fuerza es el newton (N), y la unidad de medida de magnitud para el trabajo es un newton-metro (N·m), o un joule (J).
Una cinta transportadora genera una fuerza\(\vecs{ F}=5\mathbf{\hat i}−3\mathbf{\hat j}+\mathbf{\hat k}\) que mueve una maleta de punto\((1,1,1)\) a punto a\((9,4,7)\) lo largo de una línea recta. Encuentra el trabajo realizado por la cinta transportadora. La distancia se mide en metros y la fuerza se mide en newtons.
Solución
El vector de desplazamiento\(\vecd{PQ}\) tiene punto inicial\((1,1,1)\) y punto terminal\((9,4,7)\):
\[\vecd{PQ}=⟨9−1,4−1,7−1⟩=⟨8,3,6⟩=8\mathbf{\hat i}+3\mathbf{\hat j}+6\mathbf{\hat k}. \nonumber \]
El trabajo es el punto producto de la fuerza y el desplazamiento:
\[\begin{align*} W &=\vecs{ F}⋅\vecd{PQ} \\[4pt] &= (5\mathbf{\hat i}−3\mathbf{\hat j}+\mathbf{\hat k})⋅(8\mathbf{\hat i}+3\mathbf{\hat j}+6\mathbf{\hat k}) \\[4pt] = 5(8)+(−3)(3)+1(6) \\[4pt] &=37\,\text{N⋅m} \\[4pt] &= 37\,\text{J} \end{align*}\]
Se aplica una fuerza constante de 30 lb en un ángulo de 60° para tirar de un carro de mano de 10 pies a través del suelo. ¿Cuál es el trabajo que realiza esta fuerza?
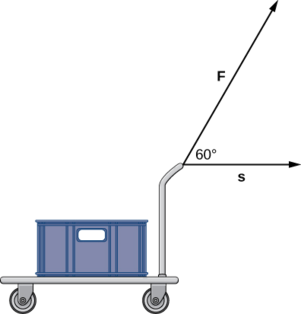
- Pista
-
Utilice la definición de trabajo como el punto producto de la fuerza y la distancia.
- Contestar
-
150 ft-lb
Conceptos clave
- El producto punto, o producto escalar, de dos vectores\(\vecs{ u}=⟨u_1,u_2,u_3⟩\) y\(\vecs{ v}=⟨v_1,v_2,v_3⟩\) es\(\vecs{ u}⋅\vecs{ v}=u_1v_1+u_2v_2+u_3v_3\).
- El producto dot satisface las siguientes propiedades:
- \(\vecs{ u}⋅\vecs{ v}=\vecs{ v}⋅\vecs{ u}\)
- \(\vecs{ u}⋅(\vecs{ v}+\vecs{ w})=\vecs{ u}⋅\vecs{ v}+\vecs{ u}⋅\vecs{ w}\)
- \(c(\vecs{ u}⋅\vecs{ v})=(c\vecs{ u})⋅\vecs{ v}=\vecs{ u}⋅(c\vecs{ v})\)
- \(\vecs{ v}⋅\vecs{ v}=‖\vecs{ v}‖^2\)
- El producto punto de dos vectores se puede expresar, alternativamente, como\(\vecs{ u}⋅\vecs{ v}=‖\vecs{ u}‖‖\vecs{ v}‖\cos θ.\) Esta forma del producto punto es útil para encontrar la medida del ángulo formado por dos vectores.
- Vectores\(\vecs{ u}\) y\(\vecs{ v}\) son ortogonales si\(\vecs{ u}⋅\vecs{ v}=0\).
- Los ángulos formados por un vector distinto de cero y los ejes de coordenadas se denominan ángulos de dirección para el vector. Los cosenos de estos ángulos se conocen como los cosenos de dirección.
- La proyección vectorial de\(\vecs{ v}\) on\(\vecs{ u}\) es el vector\(\text{proj}_\vecs{ u}\vecs{ v}=\dfrac{\vecs{ u}⋅\vecs{ v}}{‖\vecs{ u}‖^2}\vecs{ u}\). La magnitud de este vector se conoce como la proyección escalar de\(\vecs{ v}\) sobre\(\vecs{ u}\), dada por\(\text{comp}_\vecs{ u}\vecs{ v}=\dfrac{\vecs{ u}⋅\vecs{ v}}{‖\vecs{ u}‖}\).
- El trabajo se realiza cuando se aplica una fuerza a un objeto, provocando desplazamiento. Cuando la fuerza está representada por el vector\(\vecs{ F}\) y el desplazamiento está representado por el vector\(\vecs{ s}\), entonces el trabajo realizado\(W\) viene dado por la fórmula\(W=\vecs{ F}⋅\vecs{ s}=∥\vecs{ F}∥‖\vecs{ s}‖\cos θ.\)
Ecuaciones Clave
- Producto punteado de\(\vecs{ u}\) y\(\vecs{ v}\)
\(\vecs{ u}⋅\vecs{ v}=u_1v_1+u_2v_2+u_3v_3=‖\vecs{ u}‖‖\vecs{ v}‖\cos θ\)
- Coseno del ángulo formado por\(\vecs{ u}\) y\(\vecs{ v}\)
\(\cos θ=\dfrac{\vecs{ u}⋅\vecs{ v}}{‖\vecs{ u}‖‖\vecs{ v}‖}\)
- Proyección vectorial\(\vecs{ v}\) de\(\vecs{ u}\)
\(\text{proj}_\vecs{ u}\vecs{ v}=\dfrac{\vecs{ u}⋅\vecs{ v}}{‖\vecs{ u}‖^2}\vecs{ u}\)
- Proyección escalar\(\vecs{ v}\) de\(\vecs{ u}\)
\(\text{comp}_\vecs{ u}\vecs{ v}=\dfrac{\vecs{ u}⋅\vecs{ v}}{‖\vecs{ u}‖}\)
- Trabajo realizado por una fuerza\(\vecs{ F}\) para mover un objeto a través del vector de desplazamiento\(\vecd{PQ}\)
\(W=\vecs{ F}⋅\vecd{PQ}=∥\vecs{ F}∥∥\vecd{PQ}∥\cos θ\)
Glosario
- ángulos de dirección
- los ángulos formados por un vector distinto de cero y los ejes de coordenadas
- cosenos de dirección
- los cosenos de los ángulos formados por un vector distinto de cero y los ejes de coordenadas
- producto punto o producto escalar
- \(\vecs{ u}⋅\vecs{ v}=u_1v_1+u_2v_2+u_3v_3\)dónde\(\vecs{ u}=⟨u_1,u_2,u_3⟩\) y\(\vecs{ v}=⟨v_1,v_2,v_3⟩\)
- proyección escalar
- la magnitud de la proyección vectorial de un vector
- vectores ortogonales
- vectores que forman un ángulo recto cuando se colocan en posición estándar
- proyección vectorial
- el componente de un vector que sigue una dirección dada
- trabajo realizado por una fuerza
- generalmente se piensa en el trabajo como la cantidad de energía que se necesita para mover un objeto; si representamos una fuerza aplicada por un vector\(\vecs{ F}\) y el desplazamiento de un objeto por un vector\(\vecs{ s}\), entonces el trabajo realizado por la fuerza es el producto puntual de\(\vecs{ F}\) y\(\vecs{ s}\).
Colaboradores y Atribuciones
- Template:ContribOpenStaxCalc
- edited for vector notation by Paul Seeburger