
13.3: Longitud y curvatura del arco
- Page ID
- 116163

- Determine la longitud de la trayectoria de una partícula en el espacio usando la función de longitud de arco.
- Explicar el significado de la curvatura de una curva en el espacio y exponer su fórmula.
- Describir el significado de los vectores normales y binormales de una curva en el espacio.
En esta sección, estudiamos fórmulas relacionadas con curvas tanto en dos como en tres dimensiones, y vemos cómo se relacionan con diversas propiedades de una misma curva. Por ejemplo, supongamos que una función de valor vectorial describe el movimiento de una partícula en el espacio. Nos gustaría determinar qué tan lejos ha viajado la partícula en un intervalo de tiempo determinado, lo que puede describirse por la longitud del arco de la trayectoria que sigue. O bien, supongamos que la función vectorizada describe una carretera que estamos construyendo y queremos determinar qué tan bruscamente se curva la carretera en un punto dado. Esto se describe por la curvatura de la función en ese punto. Exploramos cada uno de estos conceptos en esta sección.
Longitud de arco para funciones vectoriales
Hemos visto cómo una función vectorizada describe una curva en dos o tres dimensiones. Recordemos que la fórmula para la longitud del arco de una curva definida por las funciones paramétricas\(x=x(t),y=y(t),t_1≤t≤t_2\) viene dada por
\[s=\int^{t_2}_{t_1} \sqrt{(x′(t))^2+(y′(t))^2}dt. \nonumber \]
De manera similar, si definimos una curva suave usando una función de valor vectorial\(\vecs r(t)=f(t) \,\hat{\mathbf{i}}+g(t) \,\hat{\mathbf{j}}\), donde\(a≤t≤b\), la longitud del arco viene dada por la fórmula
\[s=\int^{b}_{a} \sqrt{(f′(t))^2+(g′(t))^2}dt. \nonumber \]
En tres dimensiones, si la función de valor vectorial se describe por\(\vecs r(t)=f(t) \,\hat{\mathbf{i}}+g(t) \,\hat{\mathbf{j}}+h(t) \,\hat{\mathbf{k}}\) sobre el mismo intervalo\(a≤t≤b\), la longitud del arco viene dada por
\[s=\int^{b}_{a} \sqrt{(f′(t))^2+(g′(t))^2+(h′(t))^2}dt. \nonumber \]
Curva plana: Dada una curva suave\(C\) definida por la función\(\vecs r(t)=f(t) \,\hat{\mathbf{i}}+g(t) \, \hat{\mathbf{j}}\), donde\(t\) se encuentra dentro del intervalo\([a,b]\), la longitud del arco de\(C\) sobre el intervalo es
\[\begin{align} s &=\int^{b}_{a} \sqrt{[f′(t)]^2+[g′(t)]^2}dt \\[4pt] &=\int^{b}_{a} \|\vecs r′(t)\|dt . \label{Arc2D}\end{align} \]
Curva de espacio: Dada una curva suave\(C\) definida por la función\(\vecs r(t)=f(t) \,\hat{\mathbf{i}}+g(t) \,\hat{\mathbf{j}}+h(t) \,\hat{\mathbf{k}}\), donde\(t\) se encuentra dentro del intervalo\([a,b]\), la longitud del arco de\(C\) sobre el intervalo es
\[\begin{align} s &=\int^{b}_{a} \sqrt{[f′(t)]^2+[g′(t)]^2+[h′(t)]^2}dt \\[4pt] &=\int^{b}_{a} \|\vecs r′(t)\|dt . \label{Arc3D} \end{align} \]
Las dos fórmulas son muy similares; difieren sólo en el hecho de que una curva espacial tiene tres funciones componentes en lugar de dos. Tenga en cuenta que las fórmulas se definen para curvas suaves: curvas donde la función de valor vectorial\(\vecs r(t)\) es diferenciable con una derivada distinta de cero. La condición de suavidad garantiza que la curva no tenga cúspides (o esquinas) que puedan hacer que la fórmula sea problemática.
Calcular la longitud del arco para cada una de las siguientes funciones vectoriales:
- \(\vecs r(t)=(3t−2) \,\hat{\mathbf{i}}+(4t+5) \,\hat{\mathbf{j}},\quad 1≤t≤5\)
- \(\vecs r(t)=⟨t\cos t,t\sin t,2t⟩,0≤t≤2 \pi \)
Solución
- Usando la ecuación\ ref {Arc2D},\(\vecs r′(t)=3 \,\hat{\mathbf{i}}+4 \,\hat{\mathbf{j}}\), entonces
\[\begin{align*} s &=\int^{b}_{a} \|\vecs r′(t)\|dt \\[4pt] &=\int^{5}_{1} \sqrt{3^2 + 4^2} dt \\[4pt] &=\int^{5}_{1} 5 dt = 5t\big|^{5}_{1} = 20. \end{align*}\]
- Usando la ecuación\ ref {Arc3D},\(\vecs r′(t)=⟨ \cos t−t \sin t, \sin t+t \cos t,2⟩ \), entonces
\[\begin{align*} s &=\int^{b}_{a} ∥\vecs r′(t)∥dt \\[4pt] &=\int^{2 \pi}_{0} \sqrt{(\cos t−t \sin t)^2+( \sin t+t \cos t)^2+2^2} dt \\[4pt] &=\int^{2 \pi}_{0} \sqrt{( \cos ^2 t−2t \sin t \cos t+t^2 \sin ^2 t)+( \sin^2 t+2t \sin t \cos t+t^2 \cos ^2 t)+4} dt \\[4pt] &=\int^{2 \pi}_{0} \sqrt{\cos ^2 t+ \sin^2 t+t^2( \cos ^2 t+ \sin ^2 t)+4} dt \\[4pt] &=\int^{2 \pi}_{0} \sqrt{t^2+5} dt\end{align*}\]
Aquí podemos usar una fórmula de integración de tablas
\[\int \sqrt{u^2+a^2}du = \dfrac{u}{2}\sqrt{u^2+a^2} + \dfrac{a^2}{2} \ln \,\left|\, u + \sqrt{u^2+a^2} \,\right| + C, \nonumber \]
por lo que obtenemos
\[\begin{align*} \int^{2 \pi}_{0} \sqrt{t^2+5} dt \; &= \frac{1}{2} \bigg( t \sqrt{t^2+5}+5 \ln \,\left|t+\sqrt{t^2+5}\right| \bigg) _0^{2π} \\[4pt] &= \frac{1}{2} \bigg( 2π \sqrt{4π^2+5}+5 \ln \bigg( 2π+ \sqrt{4π^2+5} \bigg) \bigg)−\frac{5}{2} \ln \sqrt{5} \\[4pt] &≈25.343 \,\text{units}. \end{align*}\]
Calcular la longitud del arco de la curva parametrizada
\[\vecs r(t)=⟨2t^2+1,2t^2−1,t^3⟩,\quad 0≤t≤3. \nonumber \]
- Pista
-
Utilice la ecuación\ ref {Arc3D}.
- Contestar
-
\(\vecs r′(t)=⟨4t,4t,3t^2⟩,\)así\(s= \frac{1}{27}(113^{3/2}−32^{3/2})≈37.785\) unidades
Ahora volvemos a la hélice introducida anteriormente en este capítulo. Una función de valor vectorial que describe una hélice se puede escribir en la forma
\[\vecs r(t)=R \cos \left(\dfrac{2πNt}{h}\right) \,\hat{\mathbf{i}} +R \sin \left(\dfrac{2πNt}{h}\right) \,\hat{\mathbf{j}}+t \,\hat{\mathbf{k}},0≤t≤h, \nonumber \]
donde\(R\) representa el radio de la hélice,\(h\) representa la altura (distancia entre dos vueltas consecutivas), y la hélice completa\(N\) giros. Derivamos una fórmula para la longitud del arco de esta hélice usando la ecuación\ ref {Arc3D}. En primer lugar,
\[\vecs r′(t)=−\dfrac{2πNR}{h} \sin \left(\dfrac{2πNt}{h}\right) \,\hat{\mathbf{i}}+ \dfrac{2πNR}{h} \cos \left(\dfrac{2πNt}{h} \right) \,\hat{\mathbf{j}}+\,\hat{\mathbf{k}}. \nonumber \]
Por lo tanto,
\[\begin{align*} s & =\int_a^b ‖\vecs r′(t)‖dt \\[4pt] &=\int_0^h\sqrt{ \bigg(−\dfrac{2πNR}{h} \sin \bigg(\dfrac{2πNt}{h} \bigg) \bigg)^2+ \bigg( \dfrac{2πNR}{h} \cos \bigg( \dfrac{2πNt}{h} \bigg) \bigg)^2+1^2}dt \\[4pt] &=\int_0^h\sqrt{ \dfrac{4π^2N^2R^2}{h^2} \bigg( \sin ^2 \bigg(\dfrac{2πNt}{h} \bigg) + \cos ^2 \bigg( \dfrac{2πNt}{h} \bigg) \bigg)+1}dt \\[4pt] &=\int_0^h\sqrt{ \dfrac{4π^2N^2R^2}{h^2} +1}dt \\[4pt] &=\bigg[ t\sqrt{ \dfrac{4π^2N^2R^2}{h^2} +1}\bigg]^h_0 \\[4pt] &=h \sqrt{ \dfrac{4π^2N^2R^2 + h^2}{h^2}} \\[4pt] &=\sqrt{ 4π^2N^2R^2 + h^2}.\end{align*}\]
Esto da una fórmula para la longitud de un cable necesaria para formar una hélice con\(N\) giros que tienen radio\(R\) y altura\(h\).
Parametrización de longitud de arco
Ahora tenemos una fórmula para la longitud del arco de una curva definida por una función de valor vectorial. Llevemos esto un paso más allá y examinemos qué es una función de longitud de arco.
Si una función de valor vectorial representa la posición de una partícula en el espacio como una función del tiempo, entonces la función de longitud de arco mide hasta qué punto viaja esa partícula en función del tiempo. La fórmula para la función de longitud de arco se deriva directamente de la fórmula para la longitud del arco:
\[s=\int^{t}_{a} \sqrt{(f′(u))^2+(g′(u))^2+(h′(u))^2}du. \label{arclength2} \]
Si la curva está en dos dimensiones, entonces solo aparecen dos términos debajo de la raíz cuadrada dentro de la integral. La razón para utilizar la variable independiente u es distinguir entre el tiempo y la variable de integración. Ya que\(s(t)\) mide la distancia recorrida en función del tiempo,\(s′(t)\) mide la velocidad de la partícula en cualquier momento dado. Como tenemos una fórmula para\(s(t)\) en la Ecuación\ ref {arclength2}, podemos diferenciar ambos lados de la ecuación:
\[ \begin{align*} s′(t) &=\dfrac{d}{dt} \bigg[ \int^{t}_{a} \sqrt{(f′(u))^2+(g′(u))^2+(h′(u))^2}du \bigg] \\[4pt] &=\dfrac{d}{dt} \bigg[ \int^{t}_{a} ‖\vecs r′(u)‖du \bigg] \\[4pt] &=\|\vecs r′(t)\|.\end{align*}\]
Si asumimos que\(\vecs r(t)\) define una curva suave, entonces la longitud del arco siempre va en aumento, así que\(s′(t)>0\) para\(t>a\). Por último, si\(\vecs r(t)\) es una curva en la que\(\|\vecs r′(t)\|=1 \) para todos\(t\), entonces
\[s(t)=\int^{t}_{a} ‖\vecs r′(u)‖\,du=\int^{t}_{a} 1\,du=t−a, \nonumber \]
lo que significa que\(t\) representa la longitud del arco siempre y cuando\(a=0\).
Vamos a\(\vecs r(t)\) describir una curva suave para\(t≥a\). A continuación, la función de longitud de arco viene dada por
\[s(t)=\int^{t}_{a} ‖\vecs r′(u)‖\,du \nonumber \]
Además,
\[\dfrac{ds}{dt}=‖\vecs r′(t)‖>0. \nonumber \]
Si es\(‖\vecs r′(t)‖=1\) para todos\(t≥a\), entonces el parámetro\(t\) representa la longitud del arco desde el punto de partida en\(t=a\).
Una aplicación útil de este teorema es encontrar una parametrización alternativa de una curva dada, llamada parametrización de longitud de arco. Recordemos que cualquier función vectorizada puede ser reparameterizada a través de un cambio de variables. Por ejemplo, si tenemos una función\(\vecs r(t)=⟨3 \cos t,3 \sin t⟩,0≤t≤2π\) que parametriza un círculo de radio 3, podemos cambiar el parámetro de\(t\) a\(4t\), obteniendo una nueva parametrización\(\vecs r(t)=⟨3 \cos 4t,3 \sin 4t⟩\). La nueva parametrización todavía define un círculo de radio 3, pero ahora solo necesitamos usar los valores\(0≤t≤π/2\) para atravesar el círculo una vez.
Supongamos que encontramos la función de longitud de arco\(s(t)\) y somos capaces de resolver esta función para\(t\) como una función de\(s\). Entonces podemos reparameterizar la función original\(\vecs r(t)\) sustituyendo la expresión por\(t\) back into\(\vecs r(t)\). La función vectorizada ahora se escribe en términos del parámetro\(s\). Dado que la variable\(s\) representa la longitud del arco, llamamos a esto una parametrización de longitud de arco de la función original\(\vecs r(t)\). Una ventaja de encontrar la parametrización de longitud de arco es que la distancia recorrida a lo largo de la curva a partir de ahora\(s=0\) es igual al parámetro\(s\). La parametrización de longitud de arco también aparece en el contexto de curvatura (que examinamos más adelante en esta sección) e integrales de línea.
Encuentre la parametrización de longitud de arco para cada una de las siguientes curvas:
- \(\vecs r(t)=4 \cos t \,\hat{\mathbf{i}}+ 4 \sin t \,\hat{\mathbf{j}},\quad t≥0\)
- \(\vecs r(t)=⟨t+3,2t−4,2t⟩,\quad t≥3\)
Solución
- Primero encontramos la función de longitud de arco usando la ecuación\ ref {arclength2}:
\[\begin{align*} s(t) &= \int_a^t ‖\vecs r′(u)‖ \,du \\[4pt] &= \int_0^t ‖⟨−4 \sin u,4 \cos u⟩‖ \,du \\[4pt] &= \int_0^t \sqrt{(−4 \sin u)^2+(4 \cos u)^2} \,du \\[4pt] &= \int_0^t \sqrt{16 \sin ^2 u+16 \cos ^2 u} \,du \\[4pt] &= \int_0^t 4\,du = 4t, \end{align*}\]
- que da la relación entre la longitud del arco\(s\) y el parámetro\(t\) como\(s=4t;\) tal,\(t=s/4\). A continuación reemplazamos la variable\(t\) en la función original\(\vecs r(t)=4 \cos t \,\hat{\mathbf{i}}+4 \sin t \,\hat{\mathbf{j}}\) con la expresión\(s/4\) para obtener
\[\vecs r(s)=4 \cos \left(\frac{s}{4}\right) \,\hat{\mathbf{i}} + 4 \sin \left( \frac{s}{4}\right) \,\hat{\mathbf{j}}. \nonumber \]
Esta es la parametrización de longitud de arco de\(\vecs r(t)\). Dado que la restricción original sobre\(t\) fue dada por\(t≥0\), la restricción sobre s se convierte\(s/4≥0\), o\(s≥0\). - La función de longitud de arco viene dada por la ecuación\ ref {arclength2}:
\[\begin{align*} s(t) & = \int_a^t ‖\vecs r′(u)‖ \,du \\[4pt] &= \int_3^t ‖⟨1,2,2⟩‖ \,du \\[4pt] &= \int_3^t \sqrt{1^2+2^2+2^2} \,du \\[4pt] &= \int_3^t 3 \,du \\[4pt] &= 3t - 9. \end{align*}\]
Por lo tanto, la relación entre la longitud del arco\(s\) y el parámetro\(t\) es\(s=3t−9\), así\(t= \frac{s}{3}+3\). Sustituyendo esto en la función original\(\vecs r(t)=⟨t+3,2t−4,2t⟩ \) produce\[\vecs r(s)=⟨\left(\frac{s}{3}+3\right)+3,\,2\left(\frac{s}{3}+3\right)−4,\,2\left(\frac{s}{3}+3\right)⟩=⟨\frac{s}{3}+6, \frac{2s}{3}+2,\frac{2s}{3}+6⟩.\nonumber \]
Esta es una parametrización de longitud de arco de\(\vecs r(t)\). La restricción original sobre el parámetro\(t\) fue\(t≥3\), por lo que la restricción sobre\(s\) es\((s/3)+3≥3\), o\(s≥0\).
Encuentra la función de longitud de arco para la hélice
\[\vecs r(t)=⟨3 \cos t, 3 \sin t,4t⟩,\quad t≥0. \nonumber \]
Luego, use la relación entre la longitud del arco y el parámetro\(t\) para encontrar una parametrización de longitud de arco de\(\vecs r(t)\).
- Pista
-
Comience por encontrar la función de longitud de arco.
- Contestar
-
\(s=5t\), o\(t=s/5\). Sustituyendo esto en\(\vecs r(t)=⟨3 \cos t,3 \sin t,4t⟩\) da
\[\vecs r(s)=⟨3 \cos \left(\frac{s}{5}\right),3 \sin \left(\frac{s}{5}\right),\frac{4s}{5}⟩,\quad s≥0 \nonumber \]
Curvatura
Un tema importante relacionado con la longitud del arco es la curvatura. El concepto de curvatura proporciona una manera de medir cuán bruscamente gira una curva suave. Un círculo tiene curvatura constante. Cuanto menor sea el radio del círculo, mayor será la curvatura.
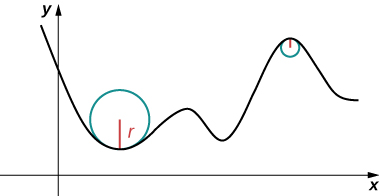
Piensa en conducir por una carretera. Supongamos que el camino yace sobre un arco de un círculo grande. En este caso apenas tendrías que girar el volante para permanecer en la carretera. Ahora supongamos que el radio es menor. En este caso habría que girar más bruscamente para mantenerse en la carretera. En el caso de una curva distinta de un círculo, a menudo es útil primero inscribir un círculo a la curva en un punto dado para que sea tangente a la curva en ese punto y “abraza” la curva lo más cerca posible en un vecindario del punto (Figura\(\PageIndex{1}\)). La curvatura de la gráfica en ese punto se define entonces para que sea la misma que la curvatura del círculo inscrito.
Definición: Curvatura
Dejar\(C\) ser una curva suave en el plano o en el espacio dado por\(\vecs r(s)\), donde\(s\) está el parámetro de longitud de arco. La curvatura\(κ\) en\(s\) es
\[κ =\bigg{\|}\dfrac{d\vecs{T}}{ds}\bigg{\|}=‖\vecs T′(s)‖. \nonumber \]
Visita este video para obtener más información sobre la curvatura de una curva espacial.
La fórmula en la definición de curvatura no es muy útil en términos de cálculo. En particular, recuerde que\(\vecs T(t)\) representa el vector tangente unitario a una función de valor vectorial dada\(\vecs r(t)\), y la fórmula para\(\vecs T(t)\) es
\[\vecs T(t)=\frac{\vecs r′(t)}{∥\vecs r′(t)∥}. \nonumber \]
Para usar la fórmula para curvatura, primero es necesario expresar\(\vecs r(t)\) en términos del parámetro de longitud de arco\(s\), luego encontrar el vector tangente unitario\(\vecs T(s)\) para la función\(\vecs r(s)\), luego tomar la derivada de\(\vecs T(s)\) con respecto a\(s\). Este es un proceso tedioso. Afortunadamente, existen fórmulas equivalentes para la curvatura.
Si\(C\) es una curva suave dada por\(\vecs r(t)\), entonces la curvatura\(κ\) de\(C\) at\(t\) viene dada por
\[κ =\dfrac{‖\vecs T′(t)‖}{‖\vecs r′(t)‖}. \label{EqK2} \]
Si\(C\) es una curva tridimensional, entonces la curvatura puede ser dada por la fórmula
\[κ =\dfrac{‖\vecs r′(t)×\vecs r′′(t)‖}{‖\vecs r′(t)‖^3}.\label{EqK3} \]
Si\(C\) es el gráfico de una función\(y=f(x)\) y ambos\(y′\) y\(y''\) existen, entonces la curvatura\(κ\) en el punto\((x,y)\) viene dada por
\[κ =\dfrac{|y''|}{[1+(y′)^2]^{3/2}}.\label{EqK4} \]
La primera fórmula sigue directamente de la regla de la cadena:
\[\dfrac{d\vecs{T}}{dt} = \dfrac{d\vecs{T}}{ds} \dfrac{ds}{dt}, \nonumber \]
donde\(s\) es la longitud del arco a lo largo de la curva\(C\). Dividir ambos lados por\(ds/dt\), y tomar la magnitud de ambos lados da
\[\bigg{\|}\dfrac{d\vecs{T}}{ds}\bigg{\|}= \left\lVert\frac{\vecs T′(t)}{\dfrac{ds}{dt}}\right\rVert.\nonumber \]
Ya que\(ds/dt=‖\vecs r′(t)‖\), esto da la fórmula para la curvatura\(κ\) de una curva\(C\) en términos de cualquier parametrización de\(C\):
\[κ =\dfrac{‖\vecs T′(t)‖}{‖\vecs r′(t)‖}.\nonumber \]
En el caso de una curva tridimensional, partimos con las fórmulas\(\vecs T(t)=(\vecs r′(t))/‖\vecs r′(t)‖\) y\(ds/dt=‖\vecs r′(t)‖\). Por lo tanto,\(\vecs r′(t)=(ds/dt)\vecs T(t)\). Podemos tomar la derivada de esta función usando la fórmula escalar del producto:
\[\vecs r″(t)=\dfrac{d^2s}{dt^2}\vecs T(t)+\dfrac{ds}{dt}\vecs T′(t).\nonumber \]
Usando estas dos últimas ecuaciones obtenemos
\[\begin{align*} \vecs r′(t)×\vecs r″(t) &=\dfrac{ds}{dt}\vecs T(t)× \bigg( \dfrac{d^2s}{dt^2}\vecs T(t)+\dfrac{ds}{dt}\vecs T′(t) \bigg) \\[4pt] &=\dfrac{ds}{dt} \dfrac{d^2s}{dt^2}\vecs T(t)×\vecs T(t)+(\dfrac{ds}{dt})^2\vecs T(t)×\vecs T′(t). \end{align*}\]
Ya que\(\vecs T(t)×\vecs T(t)=0\), esto se reduce a
\[\vecs r′(t)×\vecs r′′(t)=\left(\dfrac{ds}{dt}\right)^2\vecs T(t)×\vecs T′(t).\nonumber \]
Dado que\(\vecs T′\) es paralelo a\(\vecs N\), y\(\vecs T\) es ortogonal a\(\vecs N\), se deduce eso\(\vecs T\) y\(\vecs T′\) son ortogonales. Esto quiere decir que\(‖\vecs T×\vecs T′‖=‖\vecs T‖‖\vecs T′‖ \sin (π/2)=‖\vecs T′‖\), entonces
\[\|\vecs r′(t)×\vecs r″(t)\|=\left(\dfrac{ds}{dt}\right)^2‖\vecs T′(t)‖.\nonumber \]
Ahora resolvemos esta ecuación\(‖\vecs T′(t)‖\) y usamos el hecho de que\(ds/dt=‖\vecs r′(t)‖\):
\[‖\vecs T′(t)‖=\dfrac{‖\vecs r′(t)×\vecs r″(t)‖}{‖\vecs r′(t)‖^2}.\nonumber \]
Entonces, dividimos ambos lados por\(‖\vecs r′(t)‖\). Esto da
\[κ =\dfrac{‖\vecs T′(t)‖}{‖\vecs r′(t)‖}=\dfrac{‖\vecs r′(t)×\vecs r″(t)‖}{‖\vecs r′(t)‖^3}.\nonumber \]
Esto prueba\(\ref{EqK3}\). Para probar\(\ref{EqK4}\), partimos del supuesto de que la curva\(C\) está definida por la función\(y=f(x)\). Entonces, podemos definir\(\vecs r(t)=x \,\hat{\mathbf{i}}+f(x) \,\hat{\mathbf{j}}+0 \,\hat{\mathbf{k}}\). Usando la fórmula anterior para la curvatura:
\[\begin{align*} \vecs r′(t) &=\,\hat{\mathbf{i}}+f′(x)\,\hat{\mathbf{j}} \\[4pt] \vecs r″(t) &=f″(x)\,\hat{\mathbf{j}} \\[4pt] \vecs r′(t)×\vecs r″(t) &= \begin{vmatrix} \hat{\mathbf{i}} & \hat{\mathbf{j}} & \hat{\mathbf{k}} \\ 1 & f′(x) & 0 \\ 0 & f″(x) & 0 \end{vmatrix} =f″(x)\,\hat{\mathbf{k}}. \end{align*}\]
Por lo tanto,
\[κ= \dfrac{‖\vecs r′(t)×\vecs r″(t)‖}{‖\vecs r′(t)‖^3}=\dfrac{|f″(x)|}{(1+[f′(x)]^2)^{3/2}} \nonumber \]
Encuentre la curvatura para cada una de las siguientes curvas en el punto dado:
- \(\vecs r(t)=4 \cos t\,\hat{\mathbf{i}}+4 \sin t\,\hat{\mathbf{j}}+3t\,\hat{\mathbf{k}},\quad t=\dfrac{4π}{3}\)
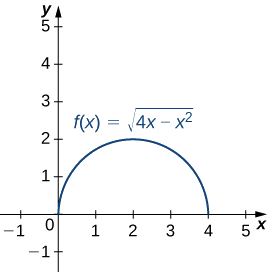
- \(\mathrm{f(x)= \sqrt{4x−x^2},x=2}\)
Solución
- Esta función describe una hélice.
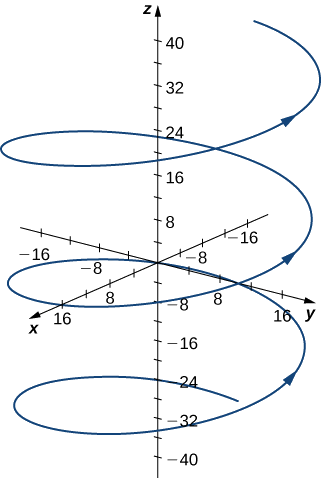
La curvatura de la hélice en se\(t=(4π)/3\) puede encontrar usando\(\ref{EqK2}\). Primero, calcule\(\vecs T(t)\):
\[\begin{align*} \vecs T(t) &=\dfrac{\vecs r′(t)}{‖\vecs r′(t)‖} \\[4pt] &=\dfrac{⟨−4 \sin t,4 \cos t,3⟩}{\sqrt{(−4 \sin t)^2+(4 \cos t)^2+3^2}}\\[4pt] &=⟨−\dfrac{4}{5} \sin t,\dfrac{4}{5} \cos t, \dfrac{3}{5}⟩. \end{align*}\]
A continuación, calcule\(\vecs T′(t):\)
\[\vecs T′(t)=⟨−\dfrac{4}{5} \cos t,− \dfrac{4}{5} \sin t,0⟩. \nonumber \]
Por último, aplicar\(\ref{EqK2}\):
\[ \begin{align*} κ &=\dfrac{‖\vecs T′(t)‖}{‖\vecs r′(t)‖} = \dfrac{‖⟨−\dfrac{4}{5} \cos t,−\dfrac{4}{5} \sin t,0⟩‖}{‖⟨−4 \sin t,4 \cos t,3⟩‖} \\[4pt] &=\dfrac{\sqrt{(−\dfrac{4}{5} \cos t)^2+(−\dfrac{4}{5} \sin t)^2+0^2}}{\sqrt{(−4 \sin t)^2+(4 \cos t)^2+ 3^2}} \\[4pt] &=\dfrac{4/5}{5}=\dfrac{4}{25}. \end{align*}\]
La curvatura de esta hélice es constante en todos los puntos de la hélice.
- Esta función describe un semicírculo.
Para encontrar la curvatura de esta gráfica, debemos usar\(\ref{EqK4}\). Primero, calculamos\(y′\) y\(y″:\)
\[\begin{align*}y &=\sqrt{4x−x^2}=(4x−x^2)^{1/2} \\[4pt] y′ &=\dfrac{1}{2}(4x−x^2)^{−1/2}(4−2x)=(2−x)(4x−x^2)^{−1/2} \\[4pt] y″ &=−(4x−x^2)^{−1/2}+(2−x)(−\dfrac{1}{2})(4x−x^2)^{−3/2}(4−2x) \\[4pt] & =−\dfrac{4x−x^2}{(4x−x^2)^{3/2}}− \dfrac{(2−x)^2}{(4x−x^2)^{3/2}} \\[4pt] &=\dfrac{x^2−4x−(4−4x+x^2)}{(4x−x^2)^{3/2}} \\[4pt] &=−\dfrac{4}{(4x−x^2)^{3/2}}. \end{align*} \nonumber \]
Luego, aplicamos\(\ref{EqK4}\):
\[ \begin{align*} κ &=\dfrac{|y''|}{[1+(y′)^2]^{3/2}} \\[4pt] &= \dfrac{\bigg| −\dfrac{4}{(4x−x^2)^{3/2}}\bigg|}{\bigg[1+((2−x)(4x−x^2)^{−1/2})^2 \bigg]^{3/2}} = \dfrac{\bigg| \dfrac{4}{(4x−x^2)^{3/2}} \bigg|}{\bigg[ 1+\dfrac{(2−x)^2}{4x−x^2} \bigg]^ {3/2}} \\[4pt] &= \dfrac{\bigg| \dfrac{4}{(4x−x^2)^{3/2}} \bigg|}{ \bigg[ \dfrac{4x−x^2+x^2−4x+4}{4x−x^2} \bigg]^{3/2}}=\bigg| \dfrac{4}{(4x−x^2)^{3/2}} \bigg| ⋅\dfrac{(4x−x^2)^{3/2}}{8} \\[4pt] &=\dfrac{1}{2}. \end{align*}\]
La curvatura de este círculo es igual al recíproco de su radio. Hay un problema menor con el valor absoluto en\(\ref{EqK4}\); sin embargo, una mirada más cercana al cálculo revela que el denominador es positivo para cualquier valor de\(x\).
Encuentra la curvatura de la curva definida por la función
\[y=3x^2−2x+4 \nonumber \]
en el punto\(x=2\).
- Pista
-
Uso\(\ref{EqK4}\).
- Contestar
-
\(κ \; =\frac{6}{101^{3/2}}≈0.0059\)
Los vectores normales y binormales
Hemos visto que la derivada\(\vecs r′(t)\) de una función de valor vectorial es un vector tangente a la curva definida por\(\vecs r(t)\), y el vector tangente unitario se\(\vecs T(t)\) puede calcular dividiendo\(\vecs r′(t)\) por su magnitud. Al estudiar el movimiento en tres dimensiones, otros dos vectores son útiles para describir el movimiento de una partícula a lo largo de una trayectoria en el espacio: el vector normal de la unidad principal y el vector binormal.
Definición: Vectores binormales
Let\(C\) Ser una curva lisa tridimensional representada por\(\vecs r\) sobre un intervalo abierto\(I\). Si\(\vecs T′(t)≠\vecs 0\), entonces el vector normal de la unidad principal at\(t\) se define como
\[\vecs N(t)=\dfrac{\vecs T′(t)}{‖\vecs T′(t)‖}. \label{EqNormal} \]
El vector binormal en\(t\) se define como
\[\vecs B(t)=\vecs T(t)×\vecs N(t),\label{EqBinormal} \]
donde\(\vecs T(t)\) está el vector tangente unitario.
Obsérvese que, por definición, el vector binormal es ortogonal tanto al vector tangente unitario como al vector normal. Además, siempre\(\vecs B(t)\) es un vector unitario. Esto se puede mostrar usando la fórmula para la magnitud de un producto cruzado.
\[‖\vecs B(t)‖=‖\vecs T(t)×\vecs N(t)‖=‖\vecs T(t)‖‖\vecs N(t)‖ \sin \theta, \nonumber \]
donde\(\theta\) esta el angulo entre\(\vecs T(t)\) y\(\vecs N(t)\). Dado que\(\vecs N(t)\) es la derivada de un vector unitario, la propiedad (vii) de la derivada de una función valorada por vector nos dice que\(\vecs T(t)\) y\(\vecs N(t)\) son ortogonales entre sí, así\(\theta=π/2\). Además, ambos son vectores unitarios, por lo que su magnitud es 1. Por lo tanto,\(‖\vecs T(t)‖‖\vecs N(t)‖ \sin \theta=(1)(1) \sin (π/2)=1\) y\(\vecs B(t)\) es un vector unitario.
El vector normal de unidad principal puede ser difícil de calcular porque el vector tangente unitario implica un cociente, y este cociente a menudo tiene una raíz cuadrada en el denominador. En el caso tridimensional, encontrar el producto cruzado del vector tangente unitario y el vector normal unitario puede ser aún más engorroso. Afortunadamente, tenemos fórmulas alternativas para encontrar estos dos vectores, y se presentan en Movimiento en el Espacio.
Para cada una de las siguientes funciones vectorizadas, encuentre el vector normal de la unidad principal. Entonces, si es posible, encuentra el vector binormal.
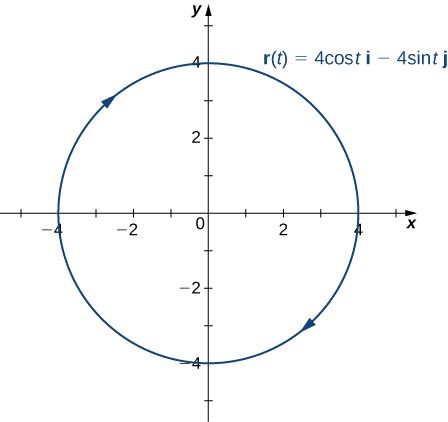
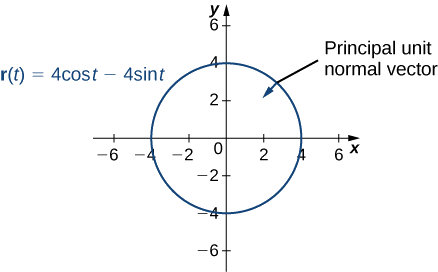
- \(\vecs r(t)=4 \cos t\,\hat{\mathbf{i}}− 4 \sin t\,\hat{\mathbf{j}}\)
- \(\vecs r(t)=(6t+2)\,\hat{\mathbf{i}}+5t^2\,\hat{\mathbf{j}}−8t\,\hat{\mathbf{k}}\)
Solución
- Esta función describe un círculo.
Para encontrar el vector normal de la unidad principal, primero debemos encontrar el vector tangente unitario\(\vecs T(t):\)
\ [\ begin {align*}\ vecs T (t) &=\ dfrac {\ vecs r′ (t)} {≈\ vecs r′ (t) 993}\\ [4pt]
&=\ dfrac {−4\ sin t\,\ hat {\ mathbf {i}} −4\ cos t\,\ hat {\ mathbf {j}} {\ sqsql rt {(−4\ sin t) ^2+ (−4\ cos t) ^2}}\\ [4pt]
&=\ dfrac {−4\ sin t\,\ hat {\ mathbf {i}} −4\ cos t\,\ hat {\ mathbf {j}}} {\ sqrt {16\ sin ^2 t+16\ cos ^2 t}}\\ [4pt]
&=\ dfrac {−4\ sin t\,\ hat {\ mathbf {i}} −4\ cos t\,\ hat {\ mathbf {j}}} {\ sqrt {16 (\ sin ^2 t+\ cos ^2 t)}}\\ [4pt]
&=\ dfrac {−4\ sin t\,\ hat {\ mathbf {i}} −4\ cos t\,\ hat {\ mathbf {j}}} {4}\\[4pt] &=− \sin t\,\hat{\mathbf{i}}− \cos t\,\hat{\mathbf{j}}.\end{align*}\]
A continuación, utilizamos\(\ref{EqNormal}\):
\ [\ begin {align*}\ vecs N (t) &=\ dfrac {\ vecs T′ (t)} {”\ vecs T′ (t) 993}\\ [4pt] &=\ dfrac {−\ cos t\,\ hat {\ mathbf {i}} +\ sin t\,\ hat {\ mathbf {j}} {\ sqrt {(−\ cos t) ^2+ (\ sin t) ^2}}\\ [4pt]
&=\ dfrac {−\ cos t\,\ hat {\ mathbf {i}} +\ sin t\,\ hat {\ mathbf {j}}} {\ sqrt {\ cos ^2 t+\ sin ^2 t}}\\ [4pt]
&=−\ cos t\,\ hat {\ mathbf {i}} +\ sin t\,\ hat {\ mathbf {j}}. \ end {alinear*}\]
Observe que el vector tangente unitario y el vector normal de unidad principal son ortogonales entre sí para todos los valores de\(t\):
\[\begin{align*} \vecs T(t)·\vecs N(t) &=⟨− \sin t,− \cos t⟩·⟨− \cos t, \sin t⟩ \\[4pt] &= \sin t \cos t−\cos t \sin t \\[4pt] &=0. \end{align*}\]
Además, el vector normal de la unidad principal apunta hacia el centro del círculo desde cada punto del círculo. Ya que\(\vecs r(t)\) define una curva en dos dimensiones, no podemos calcular el vector binormal.
- Esta función se ve así:
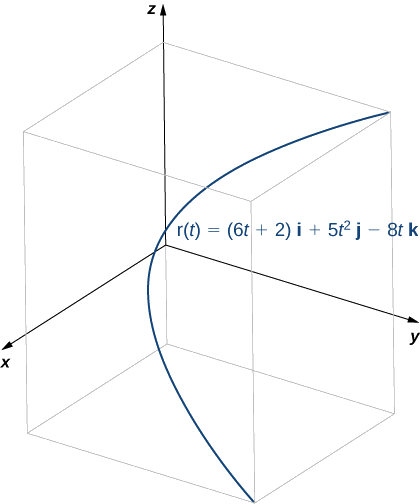
Para encontrar el vector normal de la unidad principal, primero encontramos el vector tangente unitario\(\vecs T(t):\)
\ [\ begin {align*}\ vecs T (t) &=\ dfrac {\ vecs r′ (t)} {≈\ vecs r′ (t) 993}\\ [4pt]
&=\ dfrac {6\,\ hat {\ mathbf {i}} +10t\,\ hat {\ mathbf {j}} −8\,\ hat {\ mathbf {k}}} {\ sqrt {6^2+ (10t) ^2+ (−8) ^2}}\\ [4pt]
&=\ dfrac {6\,\ hat {\ mathbf {i}} +10t\,\ hat {\ mathbf {j}} −8\,\ hat {\ mathbf {k}}} {\ sqrt {36+100t^2+^ 64 }}\\ [4pt]
&=\ dfrac {6\,\ hat {\ mathbf {i}} +10t\,\ hat {\ mathbf {j}} −8\,\ hat {\ mathbf {k}}} {\ sqrt {100 (t^2+1)}}\\ [4pt]
&=\ dfrac {3\,\ hat {\ mathbf {i}} −5t\,\ hat {\ mathbf {j}} −4\,\ hat {\ mathbf {k}}} {5\ sqrt {t^2+1}}\\ [4pt]
&=\ dfrac {3} {5} (t^2+1) ^ {−1/2}\,\ hat {\ mathbf {i}} −t (t^2 +1) ^ {−1/2}\,\ hat {\ mathbf {j}} −\ dfrac {4} {5} (t^2+1) ^ {−1/2}\,\ hat {\ mathbf {k}}. \ end {alinear*}\]
A continuación, calculamos\(\vecs T′(t)\) y\(‖\vecs T′(t)‖\):
\ [\ begin {align*}\ vecs T′ (t) &=\ dfrac {3} {5} (−\ dfrac {1} {2}) (t^2+1) ^ {−3/2} (2t)\,\ hat {\ mathbf {i}} − ((t^2+1) ^ {−1/2} −t (\ dfrac {1} {2}) (t^2+1) ^ {−3/2} (2t))\,\ hat {\ mathbf {j}} −\ dfrac {4} {5} (−\ dfrac {1} {2}) (t^2+1) ^ {−3/2} (2t)\,\ hat {\ mathbf {k}}\\ [4pt]
&=d− {3t} {5 (t^2+1) ^ {3/2}}\,\ hat {\ mathbf {i}} −\ dfrac { 1} {(t^2+1) ^ {3/2}}\,\ hat {\ mathbf {j}} +\ dfrac {4t} {5 (t^2+1) ^ {3/2}}\,\ hat {\ mathbf {k}}\\ [4pt] ≈\ vecs T′ (t) ≈&=\ sqrt {\ bigg (−\ dfrac {3t} {5 (t^2+1) ^ {3/2}}\ bigg) ^2+\ bigg (−\ dfrac {1} {(t^2+1) ^ {3/2}}\ bigg) ^2+\ bigg (\ dfrac {4t} {5 (t^2+1) ^ {3/2}}\ bigg) ^2}\\ [4pt]
=\ sqrt {\ dfrac {9t^2} {25 (t^2+1) ^3} +\ dfrac {1} {(t^2+1) ^3} +\ dfrac {16t^2} {25 (t^2+1) ^3}}\\ [4pt]
&=\ sqrt {\ dfrac {25t^2+25} {25 (t^2+1) ^3}}\\ [4pt]
&=\ sqrt {\ dfrac {\ dfrac {1} (t^2+1) ^2}}\\ [4pt]
&=\ dfrac {1} {t^2+1}. \ end {alinear*}\]
Por lo tanto, de acuerdo con\(\ref{EqNormal}\):
\ [\ begin {align*}\ vecs N (t) &=\ dfrac {\ vecs T′ (t)} {993\ vecs T′ (t) ≈}\\ [4pt]
&=\ bigg (−\ dfrac {3t} {5 (t^2+1) ^ {3/2}}\,\ hat {\ mathbf {i}} −\ dfrac {1} {(t^2+1) ^ {3/2}}\,\ hat {\ mathbf {j}} +\ dfrac {4t} {5 (t^2+1) ^ {3/2}}\,\ hat {\ mathbf {k}}\ bigg) (t^2+1)\\ [4pt]
&=−\ dfrac {3t} {5 (t^2+1) ^ {1/2}}\,\ hat {\ mathbf {i}} −\ dfrac {5} {5 (t^2+1) ^ {1/2}}\,\ hat {\ mathbf {j}} +\ dfrac {4t} {5 (t^2+1) ^ {1/2}}\,\ hat {\ mathbf {k}}\\ [4pt]
&=−\ dfrac {3t\,\ hat {\ mathbf {i}} +5\,\ hat {\ mathbf {j}} −4t\,\ hat {\ mathbf {k}}} {5\ sqrt {t^2+1}}. \ end {alinear*}\]
Una vez más, el vector tangente unitario y el vector normal de unidad principal son ortogonales entre sí para todos los valores de\(t\):
\ [\ begin {align*}\ vecs T (t) ·\ vecs N (t) &=\ bigg (\ dfrac {3\,\ hat {\ mathbf {i}} −5t\,\ hat {\ mathbf {j}} −4\,\ hat {\ mathbf {k}}} {5\ sqrt {t^2+1}}\ bigg) ·\ bigg (−\ dfrac {3t\,\ hat {\ mathbf {i}} +5\,\ hat {\ mathbf {j}} −4t\,\ hat {\ mathbf {k}}} {5\ sqrt {t^2+1}}\ bigg)\\ [4pt]
&=\ dfrac {3 (−3t) −5t (−5) −4 (4t)} {25 (t^2+1)} \\ [4pt]
&=\ dfrac {−9t+25t−16t} {25 (t^2+1)}\\ [4pt]
&=0. \ end {align*}\ nonumber\]
Por último, dado que\(\vecs r(t)\) representa una curva tridimensional, podemos calcular el vector binormal usando\(\ref{EqBinormal}\):
\ [\ begin {align*}\ vecs B (t) &=\;\ vecs T (t) ×\ vecs N (t)\\ [4pt]
&=\ begin {vmatrix}\ hat {\ mathbf {i}} &\ hat {\ mathbf {j}} &\ hat {\ mathbf {k}}\\ dfrac {3} {5\ sqrt {t^2+1}} & −\ dfrac {5t} {5\ sqrt {t^2+1}} & −\ dfrac {4} {5\ sqrt {t^2+1}}\\ −\ dfrac {3t} {5\ sqrt {t^2+1}} & −\ dfrac {5} {5\ sqrt {t^2+1}} &\ dfrac {4t} {5\ sqrt {t^2+1}}\ end {vmatrix}\\ [4pt]
&=\ bigg (\ bigg (−\ dfrac {5t} {5\ sqrt {t^2+1}}\ bigg)\ bigg (\ dfrac {4t} {5\ sqrt {t^2+1}}\ bigg) −\ bigg (−\ dfrac {4} {5\ sqrt {t^2+1}}\ bigg)\ bigg (−\ dfrac {5} {5\ sqrt {t^2+1}}\ bigg)\ bigg)\,\ hat {\ mathbf {i}}\\
& -\ bigg (\ bigg (\ dfrac {3} {5\ sqrt {t^2+1}}\ bigg)\ bigg (\ dfrac {4t} {5\ sqrt {t^2+1}}\ bigg) −\ bigg (−\ dfrac {4} {5\ sqrt {t^2+1}}\ bigg)\ bigg (−\ dfrac {3t} {5\ sqrt {t^2+1}}\ bigg)\ bigg)\,\ hat {\ mathbf {j}}\\
& +\ bigg (\ bigg (\ dfrac {3} {5\ sqrt {t^2+1}}\ bigg)\ bigg (-\ dfrac {5} {5\ sqrt {t^2+1}}\ bigg) −\ bigg (−\ dfrac {5t} {5\ sqrt {t^2+1}}\ bigg)\ bigg (−\ dfrac {3t} {5\ sqrt {t^2+1}}\ bigg)\ bigg)\,\ hat {\ mathbf {k}}\\ [4pt]
&=\ bigg (\ dfrac {−20t^2−20} {25 (t^2+1)}\ bigg)\,\ hat {\ mathbf {i}} +\ bigg (\ dfrac {−15−15t^2} {25 (t^2+1)}\ bigg)\,\ hat {\ mathbf {k}}\\ [4pt]
&= −20\ bigg (\ dfrac {t^2+1} {25 (t^2+1)}\ bigg)\,\ hat {\ mathbf {i}} −15\ bigg (\ dfrac {t^2+1} {25 (t^2+1)}\ bigg)\,\ hat {\ mathbf {k}}\\ [4pt]
&= −\ dfrac {4} {5}\,\ hat {\ mathbf {i}} −\ dfrac {3} {5}\,\ hat {\ mathbf {k}}. \ end {align*}\ nonumber\]
Encuentre el vector normal unitario para la función valorada por vector\(\vecs r(t)=(t^2−3t)\,\hat{\mathbf{i}}+(4t+1)\,\hat{\mathbf{j}}\) y evalúelo en\(t=2\).
- Pista
-
Primero, encuentra\(\vecs T(t)\), luego usa\(\ref{EqNormal}\).
- Contestar
-
\(\vecs N(2)=\dfrac{\sqrt{2}}{2}(\,\hat{\mathbf{i}}−\,\hat{\mathbf{j}})\)
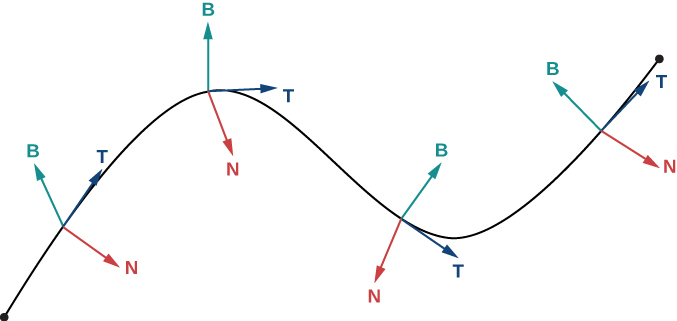
Para cualquier curva suave en tres dimensiones que esté definida por una función de valor vectorial, ahora tenemos fórmulas para el vector tangente unitario\(\vecs T\), el vector\(\vecs N\) normal unitario y el vector binormal\(\vecs B\). El vector normal unitario y el vector binormal forman un plano que es perpendicular a la curva en cualquier punto de la curva, llamado plano normal. Además, estos tres vectores forman un marco de referencia en el espacio tridimensional denominado marco de referencia Frenet (también llamado marco TNB) (Figura\(\PageIndex{2}\)). Por último, el plano determinado por los vectores\(\vecs T\) y\(\vecs N\) forma el plano osculante de\(C\) en cualquier punto\(P\) de la curva.
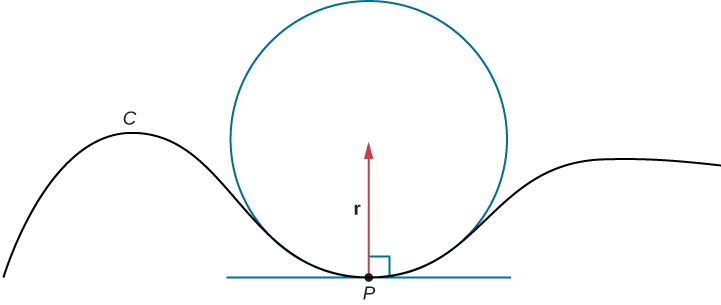
Supongamos que formamos un círculo en el plano osculante de\(C\) en punto\(P\) en la curva. Supongamos que el círculo tiene la misma curvatura que la curva en el punto\(P\) y deja que el círculo tenga radio\(r\). Entonces, la curvatura del círculo viene dada por\(\frac{1}{r}\). Llamamos\(r\) al radio de curvatura de la curva, y es igual al recíproco de la curvatura. Si este círculo se encuentra en el lado cóncavo de la curva y es tangente a la curva en el punto\(P\), entonces este círculo se denomina círculo osculante de\(C\) at\(P\), como se muestra en la Figura\(\PageIndex{3}\).
Para obtener más información sobre los círculos osculantes, consulte esta demostración sobre curvatura y torsión, este artículo sobre círculos osculantes y esta discusión de las fórmulas de Serret.
Para encontrar la ecuación de un círculo osculante en dos dimensiones, necesitamos encontrar solo el centro y el radio del círculo.
Encuentra la ecuación del círculo osculante de la curva definida por la función\(y=x^3−3x+1\) en\(x=1\).
Solución
En la figura se\(\PageIndex{4}\) muestra la gráfica de\(y=x^3−3x+1\).
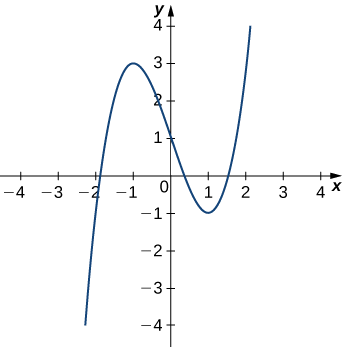
Primero, calculemos la curvatura en\(x=1\):
\[κ =\dfrac{|f″(x)|}{\bigg( 1+[f′(x)]^2 \bigg) ^{3/2}} = \dfrac{|6x|}{(1+[3x^2−3]^2)^{3/2}}. \nonumber \]
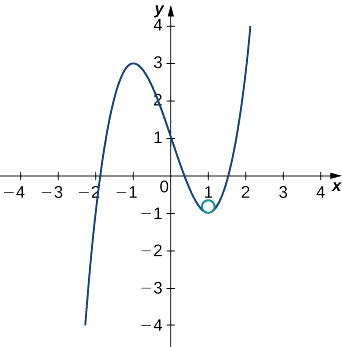
Esto da\(κ=6\). Por lo tanto, el radio del círculo osculante viene dado por\(R=\frac{1}{κ}=\dfrac{1}{6}\). A continuación, calculamos las coordenadas del centro del círculo. Cuando\(x=1\), la pendiente de la línea tangente es cero. Por lo tanto, el centro del círculo osculante se encuentra directamente por encima del punto de la gráfica con coordenadas\((1,−1)\). El centro se encuentra en\((1,−\frac{5}{6})\). La fórmula para un círculo con radio\(r\) y centro\((h,k)\) viene dada por\((x−h)^2+(y−k)^2=r^2\). Por lo tanto, la ecuación del círculo osculante es\((x−1)^2+(y+\frac{5}{6})^2=\frac{1}{36}\). La gráfica y su círculo osculante aparecen en la siguiente gráfica.
Encuentra la ecuación del círculo osculante de la curva definida por la función vector-valuada\(y=2x^2−4x+5\) en\(x=1\).
- Pista
-
Se usa\(\ref{EqK4}\) para encontrar la curvatura de la gráfica, luego dibuja una gráfica de la función alrededor\(x=1\) para ayudar a visualizar el círculo en relación con la gráfica.
- Contestar
-
\(κ =\frac{4}{[1+(4x−4)^2]^{3/2}}\)
En el punto\(x=1\), la curvatura es igual a\(4\). Por lo tanto, el radio del círculo osculante es\(\frac{1}{4}\).
A continuación aparece una gráfica de esta función:
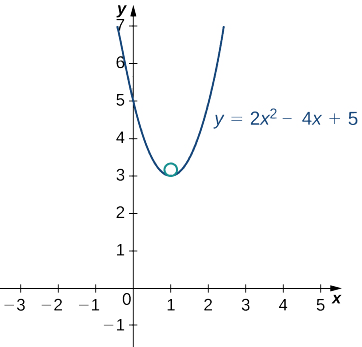
El vértice de esta parábola se ubica en el punto\((1,3)\). Además, el centro del círculo osculante está directamente por encima del vértice. Por lo tanto, las coordenadas del centro son\((1,\frac{13}{4})\). La ecuación del círculo osculante es
\((x−1)^2+(y−\frac{13}{4})^2=\frac{1}{16}\).
Conceptos clave
- La función de longitud de arco para una función de valor vectorial se calcula usando la fórmula integral\(\displaystyle s(t)=\int_a^b ‖\vecs r′(t)‖\,dt \). Esta fórmula es válida tanto en dos como en tres dimensiones.
- La curvatura de una curva en un punto en dos o tres dimensiones se define como la curvatura del círculo inscrito en ese punto. La parametrización de longitud de arco se utiliza en la definición de curvatura.
- Existen varias fórmulas diferentes para la curvatura. La curvatura de un círculo es igual al recíproco de su radio.
- El vector normal de la unidad principal en\(t\) se define como
\[\vecs N(t)=\dfrac{\vecs T′(t)}{‖\vecs T′(t)‖}. \nonumber \]
- El vector binormal at\(t\) se define como\(\vecs B(t)=\vecs T(t)×\vecs N(t)\), donde\(\vecs T(t)\) está el vector tangente unitario.
- El marco de referencia de Frenet está formado por el vector tangente unitario, el vector normal unitario principal y el vector binormal.
- El círculo osculante es tangente a una curva en un punto y tiene la misma curvatura que la curva tangente en ese punto.
Ecuaciones Clave
- Longitud del arco de la curva espacial
\(s= {\displaystyle \int _a^b} \sqrt{[f′(t)]^2+[g′(t)]^2+[h′(t)]^2} \,dt= {\displaystyle \int _a^b} ‖\vecs r′(t)‖\,dt\) - Función de longitud de arco
\(s(t)={\displaystyle \int _a^t} \sqrt{f′(u))^2+(g′(u))^2+(h′(u))^2} \,du \; or \; s(t)={\displaystyle \int _a^t}‖\vecs r′(u)‖\,du\) - \(κ=\frac{‖\vecs T′(t)‖}{‖\vecs r′(t)‖} \; or \; κ=\frac{‖\vecs r′(t)×\vecs r″(t)‖}{‖\vecs r′(t)‖^3} \; or \; κ=\frac{|y″|}{[1+(y′)^2]^{3/2}}\)
- Unidad principal vector normal
\(\vecs N(t)=\frac{\vecs T′(t)}{‖\vecs T′(t)‖}\) - Vector binormal
\(\vecs B(t)=\vecs T(t)×\vecs N(t)\)
Glosario
- función de longitud de arco
- una función\(s(t)\) que describe la longitud del arco de\(C\) la curva en función de\(t\)
- parametrización de longitud de arco
- una reparametrización de una función de valor vectorial en la que el parámetro es igual a la longitud del arco
- vector binormal
- un vector unitario ortogonal al vector tangente unitario y al vector normal unitario
- curvatura
- la derivada del vector tangente unitario con respecto al parámetro de longitud de arco
- Marco de referencia Frenet
- (marco TNB) un marco de referencia en el espacio tridimensional formado por el vector tangente unitario, el vector normal unitario y el vector binormal
- plano normal
- un plano que es perpendicular a una curva en cualquier punto de la curva
- círculo osculante
- un círculo que es tangente a una curva\(C\) en un punto\(P\) y que comparte la misma curvatura
- plano de osculación
- el plano determinado por la tangente unitaria y el vector normal unitario
- vector normal de la unidad principal
- un vector ortogonal al vector tangente unitario, dado por la fórmula\(\frac{\vecs T′(t)}{‖\vecs T′(t)‖}\)
- radio de curvatura
- el recíproco de la curvatura
- liso
- curvas donde la función de valor vectorial\(\vecs r(t)\) es diferenciable con una derivada distinta de cero