
13.4: Motor de reluctancia
- Page ID
- 153246

El motor de reluctancia variable se basa en el principio de que una pieza de hierro sin restricciones se moverá para completar una trayectoria de flujo magnético con mínima reluctancia, el análogo magnético de la resistencia eléctrica. (Figura abajo)
Renuencia sincrónica
Si el campo giratorio de un motor síncrono grande con polos salientes está desenergizado, aún desarrollará 10 o 15% de par síncrono. Esto se debe a la reluctancia variable a lo largo de una revolución del rotor. No hay una aplicación práctica para un motor de reluctancia sincrónica grande. Sin embargo, es práctico en tamaños pequeños.
Si se cortan ranuras en el rotor sin conductor de un motor de inducción, correspondientes a las ranuras del estator, se obtiene un motor de reluctancia síncrona. Arranca como un motor de inducción pero funciona con una pequeña cantidad de par síncrono. El par síncrono se debe a cambios en la reluctancia de la trayectoria magnética desde el estator a través del rotor a medida que las ranuras se alinean. Este motor es un medio económico para desarrollar un par síncrono moderado. El bajo factor de potencia, el bajo par de extracción y la baja eficiencia son características del motor de reluctancia variable accionado por línea eléctrica directa. Tal fue el estado del motor de reluctancia variable durante un siglo antes del desarrollo del control de potencia de semiconductores.
Rreluctancia conmutada
Si un rotor de hierro con polos, pero sin ningún conductor, se ajusta a un estator multifásico, se obtiene un motor de reluctancia conmutado, capaz de sincronizarse con el campo del estator. Cuando se activa un par de polos de bobina de estator, el rotor se moverá a la ruta de reluctancia magnética más baja. (Figura abajo) Un motor de reluctancia conmutado también se conoce como motor de reluctancia variable. La reluctancia del rotor a la trayectoria del flujo del estator varía con la posición del rotor.
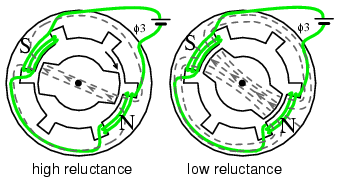
La reluctancia es una función de la posición del rotor en un motor de reluctancia variable.
La conmutación secuencial (Figura a continuación) de las fases del estator mueve el rotor de una posición a la siguiente. El flujo mangético busca el camino de menor reluctancia, el análogo magnético de la resistencia eléctrica. Este es un rotor y formas de onda simplificados para ilustrar el funcionamiento.
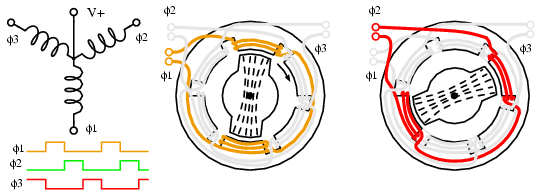
Motor de reluctancia variable, operación sobresimplificada.
Si un extremo de cada devanado trifásico del motor de reluctancia conmutado se saca a través de un cable conductor común, podemos explicar el funcionamiento como si se tratara de un motor paso a paso. (Figura anterior) Las otras conexiones de bobina se tiran sucesivamente a tierra, una a la vez, en un patrón de accionamiento de onda. Esto atrae al rotor al campo magnético giratorio en sentido horario en incrementos de 60 o.
Varias formas de onda pueden accionar motores de reluctancia variable. (Figura a continuación) La unidad de onda (a) es simple, requiriendo solo un interruptor unipolar de un solo extremo. Es decir, uno que sólo cambia en una dirección. El accionamiento bipolar (b) proporciona más par, pero requiere un interruptor bipolar. El controlador de potencia debe tirar alternativamente alto y bajo. Las formas de onda (a y b) son aplicables a la versión del motor paso a paso del motor de reluctancia variable. Para un funcionamiento suave y sin vibraciones, la aproximación de 6 pasos de una onda sinusoidal (c) es deseable y fácil de generar. La unidad de onda sinusoidal (d) puede generarse mediante un modulador de ancho de pulso (PWM) o extraerse de la línea eléctrica.
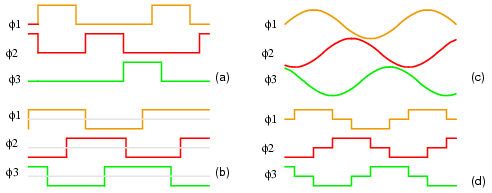
Formas de onda del motor de reluctancia variable: (a) unidad de onda unipolar, (b) paso completo bipolar (c) onda sinusoidal (d) bipolar de 6 pasos.
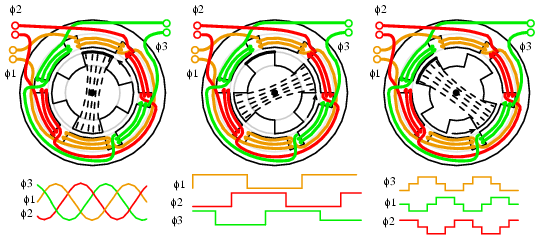
Duplicar el número de polos del estator disminuye la velocidad de rotación y aumenta el par. Esto podría eliminar una transmisión de reducción de engranajes. Un motor de reluctancia variable destinado a moverse en pasos discretos, detenerse y arrancar es un motor paso a paso de reluctancia variable, cubierto en otra sección. Si el objetivo es una rotación suave, existe una versión accionada electrónica del motor de reluctancia conmutado. Los motores de reluctancia variable o los steppers en realidad utilizan rotores como los de la Figura a continuación.
Motor de reluctancia variable accionado por electrónica
Los motores de reluctancia variable tienen un rendimiento deficiente cuando se accionan por línea eléctrica directa. Sin embargo, los microprocesadores y la unidad de alimentación de estado sólido hacen de este motor una solución económica de alto rendimiento en algunas aplicaciones de alto volumen.
Aunque difícil de controlar, este motor es fácil de girar. La conmutación secuencial de las bobinas de campo crea un campo magnético giratorio que arrastra el rotor de forma irregular alrededor con él mientras busca la ruta de reluctancia magnética más baja. La relación entre el par y la corriente del estator es altamente no lineal, difícil de controlar.
Motor de reluctancia variable accionado por electrónica.
Un motor de reluctancia variable accionado por electrónica (Figura a continuación) se asemeja a un motor de CC sin escobillas sin un rotor de imán permanente. Esto hace que el motor sea simple y económico. Sin embargo, esto se compensa con el costo del control electrónico, que no es tan simple como el de un motor de CC sin escobillas.
Si bien el motor de reluctancia variable es simple, incluso más que un motor de inducción, es difícil de controlar. El control electrónico resuelve este problema y hace que sea práctico accionar el motor muy por encima y por debajo de la frecuencia de la línea eléctrica. Un motor de reluctancia variable impulsado por un servo, un sistema de retroalimentación electrónica, controla el par y la velocidad, minimizando el par de ondulación. Figura a continuación
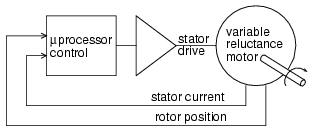
Motor de reluctancia variable accionado por electrónica.
Esto es lo opuesto al alto par de ondulación deseado en los motores paso a paso. En lugar de un paso a paso, un motor de reluctancia variable está optimizado para una rotación continua a alta velocidad con un par de ondulación mínimo. Es necesario medir la posición del rotor con un sensor de posición giratorio como un codificador óptico o magnético, o derivar esto del monitoreo de la FEM posterior del estator. Un microprocesador realiza cálculos complejos para conmutar los devanados en el momento adecuado con dispositivos de estado sólido. Esto debe hacerse con precisión para minimizar el ruido audible y el par de ondulación. Para el par de ondulación más bajo, se debe monitorear y controlar la corriente de bobinado. Los estrictos requisitos de accionamiento hacen que este motor solo sea práctico para aplicaciones de alto volumen como motores de aspiradoras de bajo consumo, motores de ventiladores o motores de bomba de bajo consumo. Una de esas aspiradoras utiliza un motor de ventilador compacto de 100,000 rpm accionado por electrónica de alta eficiencia. La simplicidad del motor compensa el costo de la electrónica de accionamiento. Sin escobillas, sin conmutador, sin devanados de rotor, sin imanes permanentes, simplifica la fabricación del motor. La eficiencia de este motor de accionamiento electrónico puede ser alta. Pero, requiere una optimización considerable, utilizando técnicas de diseño especializadas, lo que sólo se justifica para grandes volúmenes de fabricación.
Ventajas
- Construcción simple: sin escobillas, conmutador o imanes permanentes, sin Cu o Al en el rotor.
- Alta eficiencia y confiabilidad en comparación con los motores convencionales de CA o CC.
- Alto par de arranque.
- Rentable en comparación con el motor de CC sin casquillos en volúmenes altos.
- Adaptable a temperatura ambiente muy alta.
- Control de velocidad preciso de bajo costo posible si el volumen es lo suficientemente alto.
Desventajas
- La corriente frente al par es altamente no lineal
- La conmutación de fase debe ser precisa para minimizar el par de ondulación
- La corriente de fase debe controlarse para minimizar el par de ondulación
- Ruido acústico y eléctrico
- No aplicable a volúmenes bajos debido a problemas de control complejos