
13.7: Motores de Inducción Polifásicos Tesla
- Page ID
- 153251

La mayoría de los motores AC son motores de inducción. Los motores de inducción se ven favorecidos por su robustez y simplicidad. De hecho, el 90% de los motores industriales son motores de inducción.
Nikola Tesla concibió los principios básicos del motor de inducción polifásico en 1883, y tenía un modelo de medio caballo de fuerza (400 vatios) para 1888. Tesla vendió los derechos de fabricación a George Westinghouse por 65,000 dólares.
La mayoría de los motores industriales grandes (> 1 hp o 1 kW) son motores de inducción polifásicos. Por polifase, queremos decir que el estator contiene múltiples devanados distintos por polo del motor, impulsados por las correspondientes ondas sinusoidales cambiadas en el tiempo. En la práctica, se trata de dos o tres fases. Los grandes motores industriales son trifásicos. Si bien incluimos numerosas ilustraciones de motores bifásicos para mayor simplicidad, debemos enfatizar que casi todos los motores polifásicos son trifásicos. Por motor de inducción, queremos decir que los devanados del estator inducen un flujo de corriente en los conductores del rotor, como un transformador, a diferencia de un motor de colector de CC cepillado.
Construcción del motor de inducción de CA
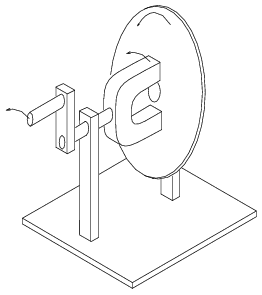
Un motor de inducción está compuesto por un rotor, conocido como armadura, y un estator que contiene devanados conectados a una fuente de energía polifásica como se muestra en la siguiente figura. El simple motor de inducción bifásico a continuación es similar al motor de 1/2 caballos de fuerza que Nikola Tesla introdujo en 1888.
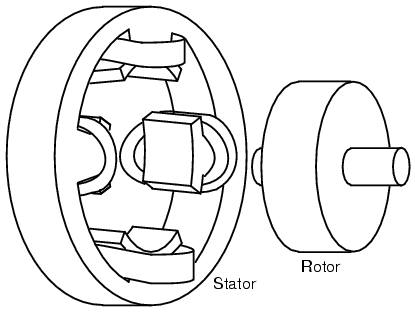
Motor de inducción polifásico Tesla.
El estator en la figura anterior se enrolla con pares de bobinas correspondientes a las fases de energía eléctrica disponible. El estator del motor de inducción bifásico anterior tiene 2 pares de bobinas, un par para cada una de las dos fases de CA. Las bobinas individuales de un par están conectadas en serie y corresponden a los polos opuestos de un electroimán. Es decir, una bobina corresponde a un polo N, la otra a un polo S hasta que la fase de CA cambia de polaridad. El otro par de bobinas está orientado 90 o en el espacio al primer par. Este par de bobinas se conecta a CA desplazada en el tiempo por 90 o en el caso de un motor bifásico. En la época de Tesla, la fuente de las dos fases de CA era un alternador bifásico.
El estator en la figura anterior tiene polos sobresalientes y obvios sobresalientes, tal como se usa en el motor de inducción temprana de Tesla. Este diseño se utiliza hasta el día de hoy para motores subfraccionarios de caballos de fuerza (<50 vatios). Sin embargo, para motores más grandes, se obtiene menos pulsación de par y mayor eficiencia si las bobinas están incrustadas en ranuras cortadas en las laminaciones del estator. (Figura abajo)
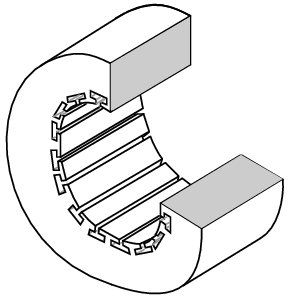
Bastidor del estator que muestra ranuras para devanados.
Las laminaciones del estator son anillos aislados delgados con ranuras perforadas a partir de láminas de acero de grado eléctrico. Una pila de estos está asegurada por tornillos de extremo, que también pueden sujetar las carcasas de extremo.
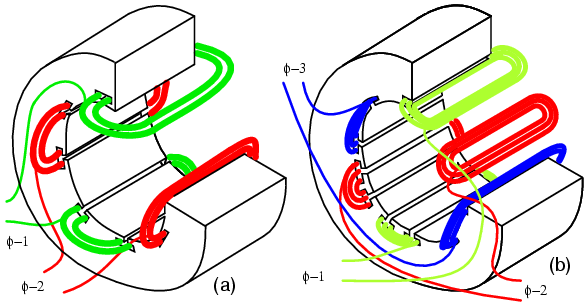
Estator con devanados (a) 2-φ y (b) 3-φ.
En la figura anterior, los devanados tanto para un motor bifásico como para un motor trifásico se han instalado en las ranuras del estator. Las bobinas se enrollan en un accesorio externo, luego se trabajan en las ranuras. El aislamiento encajado entre la periferia de la bobina y la ranura protege contra la abrasión.
Los devanados reales del estator son más complejos que los devanados individuales por polo en la figura anterior. Al comparar el motor 2-φ con el motor 2-φ de Tesla con polos salientes, el número de bobinas es el mismo. En motores grandes reales, un devanado de polo, se divide en bobinas idénticas insertadas en muchas ranuras más pequeñas que las anteriores. A este grupo se le llama correa de fase. Consulte la figura a continuación. Las bobinas distribuidas de la correa de fase cancelan algunos de los armónicos impares, produciendo una distribución de campo magnético más sinusoidal a través del polo. Esto se muestra en la sección del motor síncrono. Las ranuras en el borde del poste pueden tener menos vueltas que las otras ranuras. Las ranuras de borde pueden contener devanados de dos fases. Es decir, las correas de fase se superponen.
.png)
La clave de la popularidad del motor de inducción de CA es la simplicidad como lo demuestra el simple rotor (ver la figura a continuación). El rotor consiste en un eje, un rotor laminado de acero y una jaula de ardilla incrustada de cobre o aluminio, mostrada en (b) retirada del rotor. En comparación con una armadura de motor de CC, no hay colector. Esto elimina las escobillas, el arco, las chispas, el polvo de grafito, el ajuste y reemplazo de las escobillas, y el re-mecanizado del conmutador.
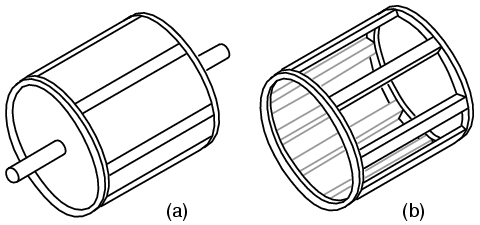
Rotor laminado con (a) jaula de ardilla incrustada, (b) jaula conductora retirada del rotor.
Los conductores de la jaula de ardilla pueden estar sesgados, retorcidos, con respecto al eje. La desalineación con las ranuras del estator reduce las pulsaciones de par.
Tanto el núcleo del rotor como el estator están compuestos por una pila de laminaciones aisladas. Las laminaciones están recubiertas con óxido aislante o barniz para minimizar las pérdidas por corrientes parásitas. La aleación utilizada en las laminaciones se selecciona para bajas pérdidas por histéresis.
Teoría de Operación de Motores de Inducción
Una breve explicación de la operación es que el estator crea un campo magnético giratorio que arrastra el rotor alrededor.
La teoría del funcionamiento de los motores de inducción se basa en un campo magnético giratorio. Un medio para crear un campo magnético giratorio es rotar un imán permanente como se muestra en la siguiente figura. Si las líneas magnéticas de flujo en movimiento cortan un disco conductor, seguirá el movimiento del imán. Las líneas de flujo que cortan el conductor inducirán un voltaje, y el consiguiente flujo de corriente, en el disco conductor. Este flujo de corriente crea un electroimán cuya polaridad se opone al movimiento del imán permanente: la Ley de Lenz. La polaridad del electroimán es tal que tira contra el imán permanente. El disco sigue con un poco menos de velocidad que el imán permanente.
El campo magnético giratorio produce torque en el disco conductor.
El par desarrollado por el disco es proporcional al número de líneas de flujo que cortan el disco y la velocidad a la que corta el disco. Si el disco girara a la misma velocidad que el imán permanente, no habría flujo cortando el disco, sin flujo de corriente inducido, sin campo electromagnético, sin torque. Así, la velocidad del disco siempre caerá por detrás de la del imán permanente giratorio, de manera que las líneas de flujo cortan el disco inducen una corriente, crean un campo electromagnético en el disco, que sigue al imán permanente. Si se aplica una carga al disco, ralentizándolo, se desarrollará más torque a medida que más líneas de flujo corten el disco. El par es proporcional al deslizamiento, el grado en que el disco cae detrás del imán giratorio. Más deslizamiento corresponde a más flujo cortando el disco conductor, desarrollando más torque.
Un velocímetro de corriente parásita automotriz analógico se basa en el principio ilustrado anteriormente. Con el disco restringido por un resorte, la deflexión del disco y la aguja es proporcional a la velocidad de rotación del imán.
Un campo magnético giratorio es creado por dos bobinas colocadas en ángulo recto entre sí, impulsadas por corrientes que están 90 o fuera de fase. Esto no debería sorprenderte si estás familiarizado con los patrones del osciloscopio Lissajous.
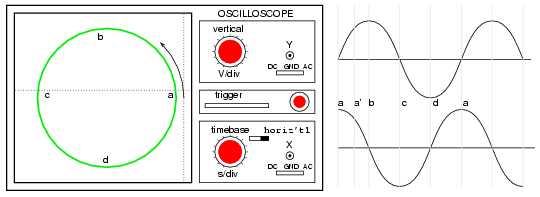
Las ondas sinusoidales desfasadas (90 o) producen un patrón circular de Lissajous.
En la figura anterior, se produce un Lissajous circular impulsando las entradas de osciloscopio horizontal y vertical con 90 o ondas sinusoidales desfasadas. Comenzando en (a) con desviación máxima “X” y mínima “Y”, la traza se mueve hacia arriba y hacia la izquierda hacia (b). Entre (a) y (b) las dos formas de onda son iguales a 0.707 V pk a 45 o. Este punto (0.707, 0.707) cae sobre el radio del círculo entre (a) y (b) La traza se mueve a (b) con deflexión mínima “X” y máxima “Y”. Con máxima desviación negativa “X” y mínima “Y”, la traza se mueve a (c). Después con mínima “X” y máxima negativa “Y”, se mueve a (d), y al volver a (a), completando un ciclo.
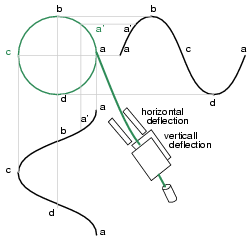
Seno del eje X y círculo de trazo coseno del eje Y.
La figura anterior muestra las dos ondas sinusoidales con desplazamiento de fase de 90 o aplicadas a placas de desviación de osciloscopio que están en ángulo recto en el espacio. Si este no fuera el caso, se mostraría una línea unidimensional. La combinación de ondas sinusoidales en fase de 90 o y deflexión en ángulo recto, da como resultado un patrón bidimensional: un círculo. Este círculo es trazado por un haz de electrones que gira en sentido contrario a las agujas del reloj.
Como referencia, la siguiente figura muestra por qué las ondas sinusoidales en fase no producirán un patrón circular. La desviación igual de “X” e “Y” mueve el punto iluminado desde el origen en (a) hasta la derecha (1,1) en (b), de vuelta a la izquierda hasta el origen en (c), hacia abajo a la izquierda hasta (-1.-1) en (d), y retrocede de derecha a origen. La línea es producida por deflexiones iguales a lo largo de ambos ejes; y=x es una línea recta.
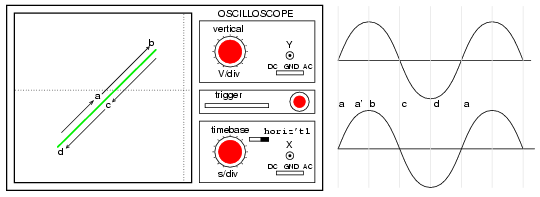
No hay movimiento circular de formas de onda en fase.
Si un par de ondas sinusoidales desfasadas de 90 o produce un Lissajous circular, un par similar de corrientes debería ser capaz de producir un campo magnético giratorio circular. Tal es el caso de un motor bifásico. Por analogía, tres devanados colocados 120 o separados en el espacio, y alimentados con las correspondientes corrientes en fase de 120 o también producirán un campo magnético giratorio.
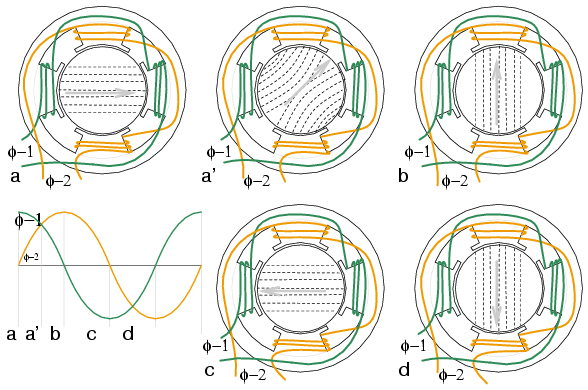
Campo magnético giratorio a partir de ondas sinusoidales en fase de 90 o.
A medida que las ondas sinusoidales en fase de 90 o, Figura anterior, avanzan desde los puntos (a) hasta (d), el campo magnético gira en sentido antihorario (figuras a-d) de la siguiente manera:
(a) φ-1 máximo, φ-2 cero
(a') φ-1 70%, φ-2 70%
(b) φ-1 cero, φ-2 máximo
(c) φ-1 máximo negativo, φ-2 cero
(d) φ-1 cero, φ-2 máximo negativo
Velocidad completa del motor y velocidad del motor síncrono
La velocidad de rotación de un campo magnético giratorio del estator está relacionada con el número de pares de polos por fase del estator. La figura de “velocidad completa” a continuación tiene un total de seis polos o tres pares de polos y tres fases. Sin embargo, no hay más que un par de polos por fase, el número que necesitamos. El campo magnético girará una vez por ciclo de onda sinusoidal. En el caso de la potencia de 60 Hz, el campo gira a 60 veces por segundo o 3600 revoluciones por minuto (rpm). Para una potencia de 50 Hz, gira a 50 rotaciones por segundo, o 3000 rpm. Las 3600 y 3000 rpm, son la velocidad sincrónica del motor. Aunque el rotor de un motor de inducción nunca alcanza esta velocidad, ciertamente es un límite superior. Si duplicamos el número de polos del motor, la velocidad síncrona se corta a la mitad porque el campo magnético gira 180 o en el espacio para 360 o de onda sinusoidal eléctrica.
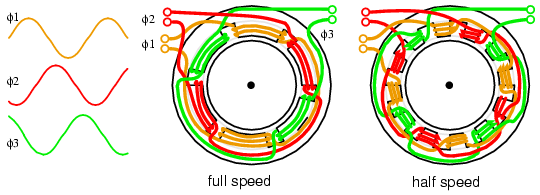
Al duplicar los polos del estator, se reduce a la mitad la velocidad
La velocidad sincrónica viene dada por:

La breve explicación del motor de inducción es que el campo magnético giratorio producido por el estator arrastra el rotor alrededor con él.
La explicación más larga es que el campo magnético del estator induce una corriente alterna en los conductores de jaula de ardilla del rotor que constituye un transformador secundario. Esta corriente inducida del rotor a su vez crea un campo magnético. El campo magnético del estator giratorio interactúa con este campo de rotor. El campo del rotor intenta alinearse con el campo del estator giratorio. El resultado es la rotación del rotor de jaula de ardilla. Si no hubiera carga de par motor mecánico, sin rodamiento, viento u otras pérdidas, el rotor giraría a la velocidad sincrónica. Sin embargo, el deslizamiento entre el rotor y el campo del estator de velocidad síncrona desarrolla par. Es el flujo magnético cortando los conductores del rotor a medida que se desliza lo que desarrolla torque. Así, un motor cargado se deslizará en proporción a la carga mecánica. Si el rotor funcionara a velocidad sincrónica, no habría flujo del estator cortando el rotor, ninguna corriente inducida en el rotor, sin par.
Torque en Motores de Inducción
Cuando se aplica energía por primera vez al motor, el rotor está en reposo, mientras que el campo magnético del estator gira a la velocidad síncrona N s. El campo del estator está cortando el rotor a la velocidad sincrónica N s. La corriente inducida en las vueltas cortocircuitadas del rotor es máxima, al igual que la frecuencia de la corriente, la frecuencia de la línea. A medida que el rotor acelera, la velocidad a la que el flujo del estator corta el rotor es la diferencia entre la velocidad síncrona N s y la velocidad real del rotor N, o (N s - N). La relación entre el flujo real que corta el rotor y la velocidad síncrona se define como deslizamiento:

La frecuencia de la corriente inducida en los conductores del rotor es tan alta como la frecuencia de línea en el arranque del motor, disminuyendo a medida que el rotor se acerca a la velocidad sincrónica. La frecuencia del rotor viene dada por:

El deslizamiento a un par del 100% es típicamente del 5% o menos en los motores de inducción. Así, para f = frecuencia de línea de 50 Hz, la frecuencia de la corriente inducida en el rotor f r = 0.05·50 = 2.5 Hz. ¿Por qué es tan bajo? El campo magnético del estator gira a 50 Hz. La velocidad del rotor es 5% menos. El campo magnético giratorio sólo está cortando el rotor a 2.5 Hz. El 2.5 Hz es la diferencia entre la velocidad sincrónica y la velocidad real del rotor. Si el rotor gira un poco más rápido, a la velocidad síncrona, ningún flujo cortará el rotor en absoluto, f r = 0.
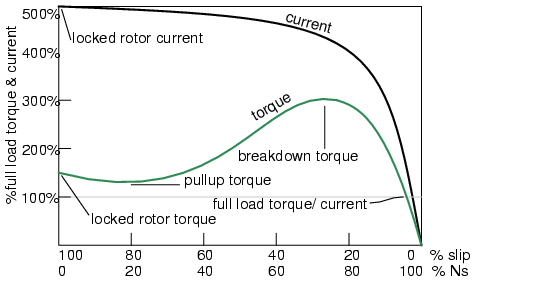
Torque y velocidad vs% de deslizamiento. %N s =%Velocidad Sincrónica.
El gráfico de la Figura anterior muestra que el par de arranque conocido como par de rotor bloqueado (LRT) es superior al 100% del par de carga completa (FLT), la clasificación de par continuo seguro. El par del rotor bloqueado es de aproximadamente 175% del FLT para el motor de ejemplo representado anteriormente. La corriente de arranque conocida como corriente de rotor bloqueada (LRC) es 500% de la corriente a plena carga (FLC), la corriente de funcionamiento segura. La corriente es alta porque esto es análogo a un secundario cortocircuitado en un transformador. A medida que el rotor comienza a girar, el par puede disminuir un poco para ciertas clases de motores a un valor conocido como el par de tracción hacia arriba. Este es el valor de par más bajo jamás encontrado por el motor de arranque. A medida que el rotor gana el 80% de la velocidad sincrónica, el par aumenta de 175% hasta 300% del par de carga completa. Este par de ruptura se debe al deslizamiento del 20% mayor de lo normal. La corriente ha disminuido sólo ligeramente en este punto, pero disminuirá rápidamente más allá de este punto. A medida que el rotor acelera a unos pocos por ciento de la velocidad sincrónica, tanto el par como la corriente disminuirán sustancialmente. El deslizamiento será solo de unos pocos por ciento durante la operación normal. Para un motor en marcha, cualquier porción de la curva de par por debajo del par nominal del 100% es normal. La carga del motor determina el punto de operación en la curva de par. Si bien el par y la corriente del motor pueden superar el 100% durante unos segundos durante el arranque, la operación continua por encima del 100% puede dañar el motor. Cualquier carga de par motor por encima del par de ruptura detendrá el motor. El par, el deslizamiento y la corriente se acercarán a cero para una condición de carga de “sin par mecánico”. Esta condición es análoga a un transformador secundario abierto.
Hay varios diseños básicos de motores de inducción (Figura a continuación) que muestran una variación consideable de la curva de par anterior. Los diferentes diseños están optimizados para iniciar y ejecutar diferentes tipos de cargas. El par de rotor bloqueado (LRT) para varios diseños y tamaños de motores varía de 60% a 350% del par de carga completa (FLT). La corriente de arranque o la corriente de rotor bloqueado (LRC) pueden variar de 500% a 1400% de la corriente de carga completa (FLC). Este consumo de corriente puede presentar un problema de arranque para motores de inducción grandes.
Clases de motor NEMA e IEC
Se han desarrollado diversas clases estándar (o diseños) para motores, correspondientes a las curvas de par (Figura a continuación) para impulsar mejor diversos tipos de cargas. La Asociación Nacional de Fabricantes Eléctricos (NEMA) ha especificado las clases de motor A, B, C y D para cumplir con estos requisitos de accionamiento. Las clases N y H similares de la Comisión Electrotécnica Internacional (IEC) corresponden a los diseños NEMA B y C respectivamente.
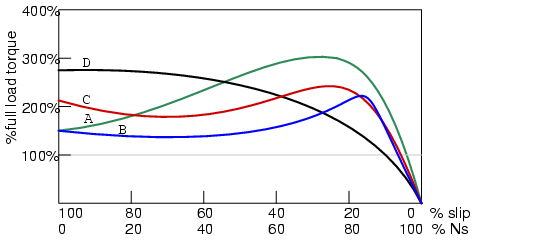
Características para diseños NEMA.
Todos los motores, excepto la clase D, operan al% 5 de deslizamiento o menos a plena carga.
- Los motores Clase B (IEC Clase N) son los motores predeterminados para usar en la mayoría de las aplicaciones. Con un par de arranque de LRT = 150% a 170% de FLT, puede iniciar la mayoría de las cargas, sin excesiva corriente de arranque (LRT). La eficiencia y el factor de potencia son altos. Por lo general, impulsa bombas, ventiladores y máquinas herramientas.
- El par de arranque de clase A es el mismo que el de clase B. El par de caída y la corriente de arranque (LRT) son mayores. Este motor maneja sobrecargas transitorias que se encuentran en las máquinas de moldeo por inyección.
- La Clase C (IEC Clase H) tiene un par de arranque más alto que la clase A y B en LRT = 200% de FLT. Este motor se aplica a cargas de arranque duro que necesitan ser accionadas a velocidad constante como transportadores, trituradoras y bombas y compresores alternativos.
- Los motores de clase D tienen el par de arranque más alto (LRT) junto con una corriente de arranque baja debido al alto deslizamiento (5% a 13% en FLT). El alto deslizamiento resulta en menor velocidad. La regulación de velocidad es pobre. Sin embargo, el motor sobresale en la conducción de cargas de velocidad altamente variables como las que requieren un volante de almacenamiento de energía. Las aplicaciones incluyen punzonadoras, cizallas y elevadores.
- Los motores de clase E son una versión de mayor eficiencia de la clase B.
- Los motores de clase F tienen un LRC, LRT y un par de ruptura mucho más bajos que la clase B. Impulsan cargas constantes de arranque fácil.
Factor de potencia en motores de inducción
Los motores de inducción presentan un factor de potencia rezagado (inductivo) a la línea de energía.El factor de potencia en grandes motores de alta velocidad completamente cargados puede ser tan favorable como 90% para motores grandes de alta velocidad. Con 3/4 de carga completa, el factor de potencia del motor de alta velocidad más grande puede ser de 92%. El factor de potencia para motores pequeños de baja velocidad puede ser tan bajo como 50%. Al arrancar, el factor de potencia puede estar en el rango de 10% a 25%, aumentando a medida que el rotor alcanza la velocidad.
El factor de potencia (PF) varía considerablemente con la carga mecánica del motor (Figura a continuación). Un motor descargado es análogo a un transformador sin carga resistiva en el secundario. Poca resistencia se refleja desde el secundario (rotor) hasta el primario (estator). Así, la línea eléctrica ve una carga reactiva, tan baja como 10% PF. A medida que el rotor se carga, un componente resistivo creciente se refleja de rotor a estator, aumentando el factor de potencia.
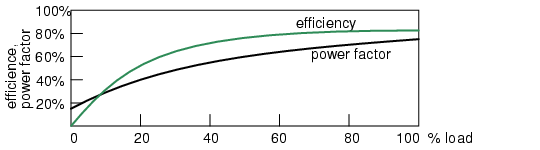
Factor de potencia y eficiencia del motor de inducción.
Eficiencia en Motores de Inducción
Los motores trifásicos grandes son más eficientes que los motores trifásicos más pequeños y la mayoría de los motores monofásicos. La gran eficiencia del motor de inducción puede ser tan alta como 95% a plena carga, aunque 90% es más común. La eficiencia para un motor de inducción de carga ligera o sin carga es pobre porque la mayor parte de la corriente está involucrada con el mantenimiento del flujo de magnetización. A medida que aumenta la carga de par, se consume más corriente en la generación de par, mientras que la corriente asociada con la magnetización permanece fija. La eficiencia al 75% de FLT puede ser ligeramente superior a la del 100% de FLT. La eficiencia disminuye un poco por ciento al 50% de FLT, y disminuyó un poco más por ciento al 25% de FLT. La eficiencia solo se vuelve pobre por debajo del 25% de FLT. La variación de la eficiencia con la carga se muestra en la Figura anterior
Los motores de inducción suelen estar sobredimensionados para garantizar que su carga mecánica pueda iniciarse y accionarse en todas las condiciones de funcionamiento. Si un motor polifásico se carga a menos del 75% del par nominal donde la eficiencia alcanza los picos, la eficiencia solo sufre ligeramente por debajo del 25% de FLT.
Corrector de factor de potencia Nola
Frank Nola de la NASA propuso un corrector de factor de potencia (PFC) como un dispositivo de ahorro de energía para motores de inducción monofásicos a fines de la década de 1970. Se basa en la premisa de que un motor de inducción menos que completamente cargado es menos eficiente y tiene un factor de potencia menor que un motor completamente cargado. Por lo tanto, hay energía para ser ahorrada en motores parcialmente cargados, motores 1-φ en particular. La energía consumida en el mantenimiento del campo magnético del estator es relativamente fija con respecto a los cambios de carga. Si bien no hay nada que guardar en un motor completamente cargado, el voltaje a un motor parcialmente cargado puede reducirse para disminuir la energía requerida para mantener el campo magnético. Esto aumentará el factor de potencia y la eficiencia. Este fue un buen concepto para los notoriamente ineficientes motores monofásicos para los que estaba destinado.
Este concepto no es muy aplicable a grandes motores trifásicos. Debido a su alta eficiencia (90% +), no hay mucha energía para ahorrar. Además, un motor 95% de eficiencia sigue siendo 94% eficiente con 50% de torque a plena carga (FLT) y 90% eficiente a 25% FLT. El potencial de ahorro energético al pasar de 100% FLT a 25% FLT es la diferencia en eficiencia 95% - 90% = 5%. Esto no es el 5% de la potencia a plena carga sino el 5% de la potencia a la carga reducida. El corrector de factor de potencia Nola podría ser aplicable a un motor trifásico que permanece inactivo la mayor parte del tiempo (por debajo del 25% FLT), como una punzonadora. Se ha estimado que el período de reembolso para el costoso controlador electrónico no es atractivo para la mayoría de las aplicaciones. Sin embargo, podría ser económico como parte de un arrancador electrónico de motor o control de velocidad. [7]
Motores de Inducción como Alternadores
Un motor de inducción puede funcionar como alternador si es accionado por un par a más del 100% de la velocidad síncrona. (Figura abajo) Esto corresponde a unos pocos% de deslizamiento “negativo”, digamos -1% deslizamiento. Esto significa que a medida que estamos rotando el motor más rápido que la velocidad sincrónica, el rotor avanza 1% más rápido que el campo magnético giratorio del estator. Normalmente se queda 1% en un motor. Dado que el rotor está cortando el campo magnético del estator en la dirección opuesta (principal), el rotor induce una tensión en el estator alimentando energía eléctrica de nuevo a la línea eléctrica.
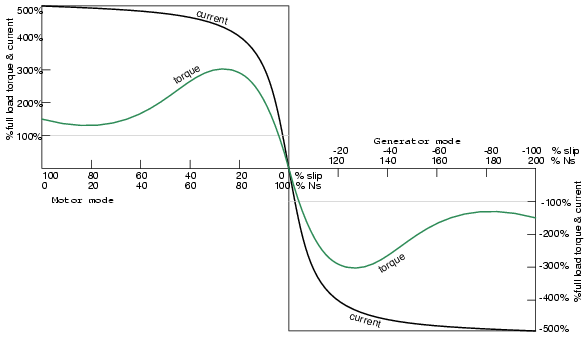
El par negativo convierte el motor de inducción en generador.
Dicho generador de inducción debe ser excitado por una fuente “viva” de 50 o 60 Hz de potencia. No se puede generar energía en caso de falla eléctrica de una compañía eléctrica. Este tipo de alternador parece no ser adecuado como fuente de alimentación de reserva. Como generador de turbina eólica de potencia auxiliar, tiene la ventaja de no requerir un interruptor automático de desconexión por falla de energía para proteger a los equipos de reparación. Es a prueba de fallas.
Pequeñas instalaciones remotas (desde la red eléctrica) pueden ser autoexcitantes colocando condensadores en paralelo con las fases del estator. Si se elimina la carga, el magnetismo residual puede generar una pequeña cantidad de flujo de corriente. Esta corriente es permitida para fluir por los condensadores sin disipar la energía. A medida que el generador se lleva a toda velocidad, el flujo de corriente aumenta para suministrar una corriente de magnetización al estator. La carga puede ser aplicada en este punto. La regulación de voltaje es pobre. Un motor de inducción se puede convertir en un generador autoexcitado mediante la adición de condensadores. [6]
El procedimiento de puesta en marcha es poner la turbina eólica al día en modo motor mediante la aplicación de voltaje normal de la línea eléctrica al estator. Cualquier velocidad de turbina inducida por el viento que supere la velocidad sincrónica desarrollará un par negativo, alimentando la energía de nuevo a la línea eléctrica, invirtiendo la dirección normal del medidor de kilovatios-hora eléctrico. Mientras que un motor de inducción presenta un factor de potencia rezagado a la línea eléctrica, un alternador de inducción presenta un factor de potencia principal. Los generadores de inducción no son ampliamente utilizados en las centrales eléctricas convencionales. La velocidad del accionamiento de la turbina de vapor es constante y controlable según lo requieran los alternadores síncronos. Los alternadores síncronos también son más eficientes.
La velocidad de una turbina eólica es difícil de controlar y está sujeta a la variación de la velocidad del viento por ráfagas. Un alternador de inducción es más capaz de hacer frente a estas variaciones debido al deslizamiento inherente. Esto tensa el tren de engranajes y los componentes mecánicos menos que un generador síncrono. Sin embargo, esta variación de velocidad permisible solo asciende a aproximadamente 1%. Por lo tanto, un generador de inducción conectado por línea directa se considera de velocidad fija en una turbina eólica. Consulte Generador de inducción de doble alimentación para un verdadero alternador de velocidad variable. Se pueden cambiar múltiples generadores o múltiples devanados en un eje común para proporcionar una velocidad alta y baja para adaptarse a las condiciones variables del viento.
Arranque del Motor y Control de Velocidad
Algunos motores de inducción pueden extraer más del 1000% de la corriente a plena carga durante el arranque; sin embargo, unos pocos cientos por ciento es más común. Los motores pequeños de unos pocos kilovatios o más pequeños se pueden arrancar por conexión directa a la línea eléctrica. Arrancar motores más grandes puede causar un hundimiento de voltaje de línea, afectando otras cargas. Los disyuntores nominales de arranque del motor (análogos a los fusibles de soplado lento) deben reemplazar los disyuntores estándar para arrancar motores de unos pocos kilovatios. Este disyuntor acepta sobrecorriente alta durante la duración del arranque.
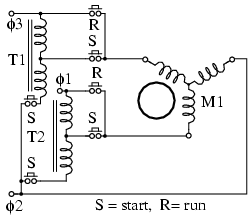
Arrancador de motor de inducción autotransformador.
Los motores de más de 50 kW utilizan arrancadores de motor para reducir la corriente de línea de varios cientos a unos pocos cientos por ciento de la corriente de carga completa. Un autotransformador de servicio intermitente puede reducir el voltaje del estator por una fracción de minuto durante el intervalo de inicio, seguido de la aplicación de voltaje de línea completa como en la figura anterior. El cierre de los contactos S aplica voltaje reducido durante el intervalo de arranque. Los contactos S se abren y los contactos R se cierran después del arranque. Esto reduce la corriente de arranque a, digamos, 200% de la corriente a plena carga. Dado que el autotransformador solo se usa para el intervalo de arranque corto, puede tener un tamaño considerablemente más pequeño que una unidad de servicio continuo.
Funcionamiento de motores trifásicos en provisiones monofásicas
Los motores trifásicos funcionarán con una sola fase tan fácilmente como los motores monofásicos. El único problema para cualquiera de los motores es el arranque. A veces, los motores trifásicos se compran para su uso en monofásico si se anticipa el aprovisionamiento trifásico. La potencia nominal debe ser 50% mayor que para un motor monofásico comparable para compensar un devanado no utilizado. La monofásico se aplica a un par de devanados simultáneos con un condensador de arranque en serie con el tercer devanado. El interruptor de arranque se abre en la figura siguiente al arrancar el motor. A veces se retiene un condensador más pequeño que el condensador de arranque mientras se ejecuta.
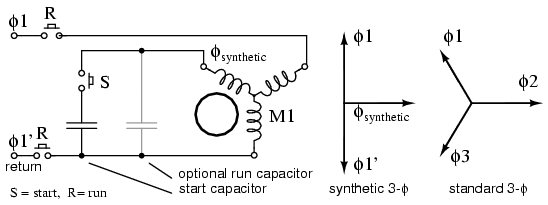
Arrancar un motor trifásico en monofásico.
El circuito en la figura anterior para hacer funcionar un motor trifásico en una sola fase se conoce como convertidor de fase estática si el eje del motor no está cargado. Además, el motor actúa como un generador trifásico. La energía trifásica se puede extraer de los tres devanados del estator para alimentar otros equipos trifásicos. El condensador suministra una fase sintética aproximadamente a mitad de camino 90 o entre los terminales monofásicos de la fuente de alimentación de 180° o para el arranque. Mientras está funcionando, el motor genera aproximadamente 3-φ estándar, como se muestra en la figura anterior. Matt Isserstedt muestra un diseño completo para alimentar un taller de máquinas para el hogar. [8]
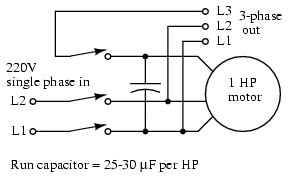
Convertidor de fase estática de arranque automático. Condensador de funcionamiento = 25-30µF por HP. Adaptado de la Figura 7, Hanrahan [9]
Dado que un convertidor de fase estático no tiene carga de par, puede iniciarse con un condensador considerablemente más pequeño que un condensador de arranque normal. Si es lo suficientemente pequeño, puede dejarse en circuito como condensador de funcionamiento. Ver la figura anterior. Sin embargo, los condensadores de funcionamiento más pequeños dan como resultado una mejor salida de potencia trifásica como en la figura a continuación. Además, el ajuste de estos condensadores para igualar las corrientes medidas en las tres fases da como resultado la máquina más eficiente. [9] Sin embargo, se requiere un condensador de arranque grande durante aproximadamente un segundo para iniciar rápidamente el convertidor. Hanrahan proporciona detalles de construcción. [9]
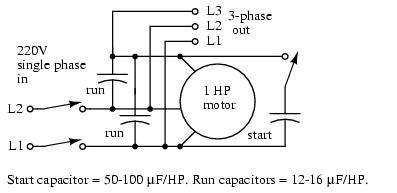
Convertidor de fase estático más eficiente. Capacitor de arranque = 50-100µF/HP. Capacitores de funcionamiento = 12-16 µF/HP. Adaptado de la Figura 1, Hanrahan [9]
Motores de inducción con múltiples campos
Los motores de inducción pueden contener múltiples devanados de campo, por ejemplo, un devanado de 4 polos y uno de 8 polos correspondientes a velocidades síncronas de 1800 y 900 rpm. Energizar un campo u otro es menos complejo que volver a cablear las bobinas del estator en la figura siguiente.
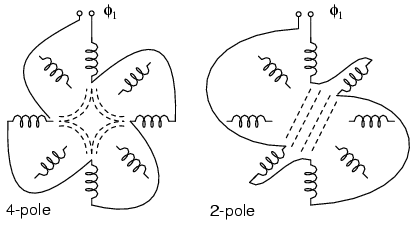
Múltiples campos permiten el cambio de velocidad.
Si el campo está segmentado con cables sacados, se puede volver a cablear (o cambiar) de 4 polos a 2 polos como se muestra arriba para un motor bifásico. Los segmentos de 22.5 o son conmutables a 45 o segmentos. Solo el cableado para una fase se muestra arriba para mayor claridad. Por lo tanto, nuestro motor de inducción puede funcionar a múltiples velocidades. Al cambiar el motor anterior de 60 Hz de 4 polos a 2 polos, la velocidad síncrona aumenta de 1800 rpm a 3600 rpm. Si el motor es accionado por 50 Hz, ¿cuáles serían las velocidades síncronas correspondientes de 4 polos y 2 polos?

Motores de Inducción con Voltaje Variable
La velocidad de los pequeños motores de inducción de jaula de ardilla para aplicaciones tales como ventiladores de accionamiento puede cambiarse reduciendo el voltaje de la línea. Esto reduce el par disponible para la carga, lo que reduce la velocidad (ver figura a continuación).
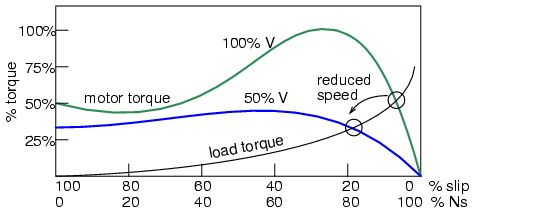
El voltaje variable controla la velocidad del motor de inducción.
Control Electrónico de Velocidad en Motores de Inducción
La electrónica moderna de estado sólido aumenta las opciones para el control de velocidad. Al cambiar la frecuencia de línea de 50 o 60 Hz a valores superiores o inferiores, se puede cambiar la velocidad sincrónica del motor. Sin embargo, la disminución de la frecuencia de la corriente alimentada al motor también disminuye la reactancia X L, lo que aumenta la corriente del estator. Esto puede hacer que el circuito magnético del estator se sature con resultados desastrosos. En la práctica, el voltaje al motor necesita ser disminuido cuando se disminuye la frecuencia.
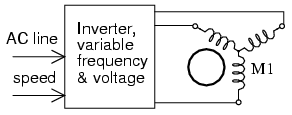
Accionamiento electrónico de velocidad variable.
Por el contrario, la frecuencia de accionamiento puede aumentarse para aumentar la velocidad síncrona del motor. Sin embargo, es necesario aumentar el voltaje para superar la reactancia creciente para mantener la corriente hasta un valor normal y mantener el par. El inversor (Figura) aproxima las ondas senoidales al motor con salidas de modulación de ancho de pulso. Esta es una forma de onda cortada que está encendida o apagada, alta o baja, el porcentaje de tiempo de “encendido” corresponde al voltaje de onda sinusoidal instantánea.
Una vez que se aplica la electrónica al control del motor de inducción, hay muchos métodos de control disponibles, que varían de lo simple a lo complejo:
- Control de Escalador Método de bajo costo descrito anteriormente para controlar solo voltaje y frecuencia, sin retroalimentación.
- Control de vectores También conocido como control de fase vectorial. Los componentes productores de flujo y par de la corriente del estator se miden o estiman en tiempo real para mejorar la curva de par-velocidad del motor. Esto es intensivo en cómputos.
- Control de par directo Un elaborado modelo de motor adaptativo permite un control más directo del flujo y el par sin retroalimentación. Este método responde rápidamente a los cambios de carga.
Resumen de motores de inducción polifásicos Tesla
- Un motor de inducción polifásico consiste en un devanado polifásico incrustado en un estator laminado y una jaula de ardilla conductora incrustada en un rotor laminado.
- Las corrientes trifásicas que fluyen dentro del estator crean un campo magnético giratorio que induce una corriente, y el consiguiente campo magnético en el rotor. El par del rotor se desarrolla a medida que el rotor se desliza un poco detrás del campo del estator giratorio.
- A diferencia de los motores monofásicos, los motores de inducción polifásicos se inician
- Los arrancadores de motor minimizan la carga de la línea eléctrica al tiempo que proporcionan un par de arranque más grande que el requerido durante Los arrancadores reductores de corriente de línea solo se requieren para motores grandes.
- Los motores trifásicos funcionarán en monofásico, si se arrancan.
- Un convertidor de fase estática es un motor trifásico que funciona en una sola fase sin carga de eje, generando una salida trifásica.
- Se pueden volver a cablear múltiples devanados de campo para múltiples velocidades de motor discretas cambiando el número de polos.
Motores Lineales de Inducción
El estator enrollado y el rotor de jaula de ardilla de un motor de inducción pueden cortarse en la circunferencia y desenrollarse en un motor de inducción lineal. La dirección del recorrido lineal es controlada por la secuencia del accionamiento a las fases del estator.
El motor de inducción lineal ha sido propuesto como un accionamiento para trenes de pasajeros de alta velocidad. Hasta este punto, el motor de inducción lineal con el sistema de levitación por repulsión magnética que lo acompaña requerido para una conducción suave ha sido demasiado costoso para todas las instalaciones menos experimentales. Sin embargo, el motor de inducción lineal está programado para reemplazar los sistemas de lanzamiento de aviones catapultas impulsados por vapor en la próxima generación de portaaviones navales, CVNX-1, en 2013. Esto aumentará la eficiencia y reducirá el mantenimiento. [4] [5]