
4.3: Leyes de conservación
- Page ID
- 129821

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\(\newcommand{\longvect}{\overrightarrow}\)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)Conceptos y principios
La relación impulso-impulso
Ya hemos utilizado la relación impulso-impulso para analizar situaciones que involucran fuerzas constantes. La relación se aplica típicamente en su forma de componente:
\ [\ comenzar {alineado}
&m v_ {x i} +\ Sigma\ izquierda (F_ {x} (\ Delta t)\ derecha) =m v_ {x f}\\
&m v_ {y_ {i}} +\ Sigma\ izquierda (F_ {y} (\ Delta t)\ derecha) =m v_ {y_ {f}}\\
&m v_ {z i} +\ Sigma\ izquierda (F_ {z} (\ Delta t)\ derecha) =m v_ {z f}
\ final {alineado}\ nonumber\]
Ojalá no sea demasiado exagerado argumentar que para fuerzas que varían en magnitud o dirección, la simple suma a lo largo de un intervalo de tiempo (\(\delta\)t) debe ser reemplazada por una integral sobre un tiempo infinitesimal (dt):
\ [\ begin {alineado}
&m v_ {x_ {i}} +\ int_ {t_ {i}} ^ {t_ {f}} F_ {x} d t=m v_ {x_ {f}}\\
&m v_ {y_ {i}} +\ int_ {t_ {i}} ^ {t_ {f}} F_ {y} d t=m v_ {y_ {f}}\\
&m v_ {z i} +\ int_ {t_ {i}} ^ {t_ {f}} F_ {z} d t=m v_ {z f}
\ final {alineado}\ nonumber\]
Independientemente de si las fuerzas que actúan sobre un objeto son constantes o no, el impulso que ejercen sobre el objeto es precisamente igual al cambio en el impulso del objeto.
La relación trabajo-energía
Nuestro encuentro previo con la relación trabajo-energía resultó en:
\[\frac{1}{2} m {v_{i}}^{2}+m g h_{i}+\Sigma(|F \| \Delta r| \cos \phi)=\frac{1}{2} m {v_{f}}^{2}+m g h_{f} \nonumber\]
donde las fuerzas que actuaban sobre el objeto de interés eran constantes tanto en magnitud como en dirección. Nuevamente, por fuerzas que varían, generalizaré este resultado para:
\[\frac{1}{2} m {v_{i}}^{2}+m g h_{i}+\int_{r_{i}}^{r_{f}}(F \cos \phi) d r=\frac{1}{2} m {v_{f}}^{2}+m g h_{f} \nonumber\]
donde el ángulo\(\phi\) es el ángulo entre la fuerza instantánea que actúa sobre el objeto y el desplazamiento instantáneo del objeto (dr). Así, este ángulo puede cambiar a medida que el objeto se mueve a lo largo de su trayectoria. Técnicamente, esta integral se denomina integral de línea y su evaluación puede ser bastante complicada.
También recordamos de nuestra anterior discusión sobre trabajo-energía que esta no es una ecuación vectorial, lo que significa que no se aplica de manera independiente en cada una de las direcciones de coordenadas.
Herramientas de análisis
Aplicación de la Relación Impulso-Momentum
Reexaminemos la misma situación que examinamos al inicio del capítulo anterior, un cohete lanzado directamente hacia arriba con un empuje dependiente del tiempo.
Un cohete de juguete de 2.0 kg está equipado con un motor que proporciona un empuje aproximadamente modelado por la función F (t) = (60 N/s) t - (15 N/s 2) t 2, para 0 < t < 4.0 s, y cero a partir de entonces. El cohete se lanza directamente hacia arriba.
Para el análisis, aplicaremos la relación impulso-impulso entre:
Evento 1: En el instante en que el cohete abandona la plataforma de lanzamiento.
Evento 2: El instante en que el empuje cae a cero.

\ [\ begin {alineado}
&m v_ {y_ {i}} +\ int_ {t_ {i}} ^ {t_ {f}} F_ {y} d t=m v_ {y_ {f}}\\
&2 (0) +\ int_ {t_ {i}} ^ {t_ {f}}\ left (F_ {\ text {empuje}} -F_ _ {\ texto {gravedad}}\ derecha) d t=2 v_ {y_ {f}}\\
&\ int_ {0.36} ^ {4}\ izquierda (60 t-15 t^ {2} -2 (9.8)\ derecha) d t=2 v_ {y_ {f}}
\ end {alineado}\ nonumber\]
Recuerda del último capítulo que el cohete no sale de la plataforma de lanzamiento hasta 0.36 s después de que se encienda el motor.
\ [\ begin {alineado}
&\ int_ {0.36} ^ {4}\ izquierda (60 t-15 t^ {2} -19.6\ derecha) d t=2 v_ {y_ {f}}\\
& {\ izquierda [30 t^ {2} -5 t^ {3} -19.6 t\ derecha] _ {0.36} ^ {4} =2 v_ {y_ {f}}}\\
&\ izquierda (30 (4) ^ {2} -5 (4) ^ {3} -19.6 (4)\ derecha) -\ izquierda (30 (0.36) ^ {2} -5 (0.36) ^ {3} -19.6 (0.36)\ derecha) =2 v_ {y_ {f}}\\
&v_ {y_ {f}} =42.5\ mathrm {~m}/\ mathrm {s}
\ end {alineado}\ nonumber\]
Cuando el motor se apaga, el cohete viaja a 42.5 m/s hacia arriba.
También podríamos aplicar la relación impulso-impulso entre:
Evento 1: El instante en que el empuje cae a cero.
Evento 2: El instante en que el cohete alcanza su altura máxima.
Durante este intervalo, la única fuerza que actúa sobre el cohete es la fuerza de la gravedad, y la relación impulso-momento es:
\ [\ begin {alineado}
&m v_ {y_ {i}} +\ int_ {t_ {i}} ^ {t_ {f}} F_ {y} d t=m v_ {y_ {f}}\\
&2 (42.5) +\ int_ {4} ^ {t_ {f}}\ izquierda (-F_ {\ texto {gravedad}}\ derecha) t=2 (0)\\
&85+\ int_ {4} ^ {t_ {f}} (-19.6) d t=0\\
&85-19.6\ izquierda (t_ {f}\ derecha) +19.6 (4) =0\\
&t_ {f} =8.34 s
\ end {alineado}\ nonumber\]
De esta manera, el cohete alcanza su mayor altitud 8.34 s después del lanzamiento.
Es importante señalar que cuando una fuerza es una función del tiempo, es relativamente fácil integrar la función y determinar el impulso. No obstante, debe quedar claro que no sería fácil determinar el trabajo realizado por una fuerza de este tipo. Dado que el trabajo se expresa como una integral de una fuerza con respecto a un desplazamiento (dr), la función de fuerza tiene que expresarse en términos de posición, r. En general, no es una tarea fácil (o a veces posible) “convertir” una función del tiempo en una función de posición, por lo que la energía-trabajo no es particularmente útil manera de analizar sistemas cuando las fuerzas que actúan dependen del tiempo. Sin embargo, si las fuerzas dependen de la posición del objeto, la energía de trabajo es una poderosa herramienta de análisis.
Aplicación de la relación trabajo-energía
Una bola de 0.15 kg se lanza verticalmente hacia arriba por medio de un émbolo accionado por resorte, se tira hacia atrás 8.0 cm y se libera. Se requiere una fuerza de aproximadamente 10 N para empujar el émbolo hacia atrás 8.0 cm.
La fuerza ejercida por un resorte
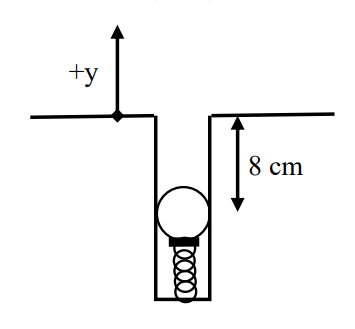
La fuerza que ejerce el resorte sobre la bola depende de la cantidad en la que se comprima el resorte. Cuanto más se comprime el resorte, mayor es la fuerza que ejerce sobre la pelota. Un modelo común es que la fuerza ejercida por un resorte es directamente proporcional a la cantidad de deformación del resorte, en este caso la compresión. La deformación (es) se define como la diferencia entre la longitud actual del resorte (L) y la longitud de equilibrio (L 0):
\[s=L-L_{0} \nonumber\]
Si definimos la dirección de la coordenada positiva para apuntar en la misma dirección que la deformación positiva (estiramiento), entonces
\[F_{\text {spring }}=-k s \nonumber\]
con la constante de proporcionalidad, k, referida como la constante de resorte.
Para el émbolo, ya que se necesitan 10 N para comprimir el resorte 8.0 cm,
\ [\ begin {alineado}
&F_ {\ text {spring}} =-k s\\
&10=-k (-0.08)\\
&k=125\ frac {N} {m}
\ end {alineado}\ nonumber\]
Para el análisis, aplicaremos la relación trabajo-energía entre:
Evento 1: El instante en que se libera el émbolo.
Evento 2: El instante en que la pelota alcanza su altura máxima.
Para estos dos eventos, trabajo-energía se ve así:
\ [\ begin {alineado}
&\ frac {1} {2} m {v_ {i}} ^ {2} +m g h_ {i} +\ int_ {r_ {i}} ^ {r_ {f}} (F\ cos\ phi) d r=\ frac {1} {2} m {v_ {f}} ^ {2} +m g h_ {f}}\\
&0+0.15 (9.8) (-0.08) +\ int_ {y_ {i}} ^ {y_ {f}}\ left (F_ {\ text {spring}}\ cos\ phi\ derecha) d y=0+0.15 (9.8) h_ {f}
\ end {alineado}\ nonumber\ ]
Para hacer la integral, debemos expresar F spring en términos de la variable de integración, y. para el sistema de coordenadas elegido, s e y son idénticos. También tenga en cuenta que la fuerza del resorte y la dirección de movimiento de la bola apuntan en la misma dirección. Por lo tanto,\(\phi=0 \).
\ [\ begin {alineado}
&-0.118+\ int_ {-0.08} ^ {0} (-125 s) (\ cos 0) d s=1.47 h_ {f}\\
&-0.118+\ izquierda [-62.5 s^ {2}\ derecha] _ {-0.08} ^ {0} =1.47 h_ {f}\\
&-0.118+\ izquierda [0+62.5 (-0.08) ^ {2}\ derecha] =1.47 h_ {f}\\
&-0.118+0.40=1.47 h_ {f}\\
&h_ {f} =0.19 m
\ final {alineado}\ nonumber\]
La bola alcanza una altura máxima de 19 cm por encima de la parte superior del émbolo.
Energía Potencial Elástica
Cuando un objeto interactúa con un resorte, u otro material elástico, un modelo común es que el material reacciona linealmente, es decir, con una fuerza directamente proporcional a la deformación del material. Es posible calcular el trabajo realizado por el material lineal en general, y reescribir la relación trabajo-energía de tal manera que se incorporen los efectos de este trabajo desde el inicio. Esto se conoce como construir una función de energía potencial para el trabajo realizado por el material elástico. Hicimos exactamente lo mismo antes por la fuerza de gravedad.
Imagínese un resorte de constante elástica k, inicialmente deformado por una distancia s i. Cambia su deformación, resultando en última instancia en deformación s f. Para calcular el trabajo realizado por el resorte sobre el objeto causando la deformación:
\ [\ begin {alineado}
&\ text {Trabajo} =\ int_ {r_ {i}} ^ {r_ {f}} (F\ cos\ phi) d r\\
&\ text {Trabajo} =\ int_ {r_ {i}} ^ {r_ {f}} (-k s) (\ cos\ phi) d r
\ end {alineado}\ nonumber\]
Elegir un sistema de coordenadas en el que s y r sean intercambiables (el origen se ubica en el punto donde el resorte está en su longitud natural y la dirección de elongación es positiva) y permitir que la fuerza y el desplazamiento estén en la misma dirección (\(\phi=0\)) da como resultado,
\ [\ begin {alineado}
&\ text {Trabajo} =\ int_ {s_ {i}} ^ {s_ {f}} (-k s) (\ cos 0) d s\\
&\ text {Trabajo} =-\ frac {1} {2} k s_ {f} {} {} ^ {2} +\ frac {1} {2} k s_ {i} {^ ^ {2}
\ final {alineado}\ nonumber\]
Los términos\(\frac{1}{2} \mathrm{ks}^{2}\),, se denominan energía potencial elástica.
La inserción de este resultado en la relación trabajo-energía da como resultado
\[\frac{1}{2} m {v_{i}}^{2}+\frac{1}{2} k {s_{i}}^{2}+m g h_{i}+\int_{r_{i}}^{r_{f}}(F \cos \phi) d r=\frac{1}{2} m {v_{f}}^{2}+\frac{1}{2} k {s_{f}}^{2}+m g h_{f} \nonumber \]
en el entendimiento de que las fuerzas que quedan en la ecuación, que pueden hacer funcionar en el sistema, no incluyen la fuerza de gravedad ni la fuerza del resorte. El trabajo realizado por la fuerza de gravedad y la fuerza del resorte ya están incluidos en la relación a través de la inclusión de los términos energéticos potenciales.
Aplicación de la relación trabajo-energía con energía potencial elástica
Una bola de 0.15 kg se lanza verticalmente hacia arriba por medio de un émbolo accionado por resorte, se tira hacia atrás 8.0 cm y se libera. Se requiere una fuerza de aproximadamente 10 N para empujar el émbolo hacia atrás 8.0 cm.
Se sabe que la constante elástica del émbolo es de 125 N/m desde arriba. La aplicación de la relación trabajo-energía con términos de energía potencial entre el instante en que se libera el émbolo y el instante en que la bola alcanza su altura máxima da como resultado,
\ [\ begin {alineado}
&\ frac {1} {2} m {v_ {i}} ^ {2} +\ frac {1} {2} k {s_ {i}} ^ {2} +m g h_ {i} +\ int_ {r_ {i}} ^ {r_ {f}} (F\ cos\ phi) d r=\ frac {1} {2} m {v_ {f}} ^ {2} +\ frac {1} {2} k {s_ {f}} ^ {2} +m g h_ {f}\\
&0+\ frac {1} {2} (125) (-0.08) ^ {2} +0.15 (9.8) (-0.08) +0=0+0.15 (9.8) h_ {f}\\
& ; h_ {f} =0.19 m
\ end {alineado}\ nonumber\]
Por supuesto, esto da como resultado la misma respuesta que antes.
Aplicación de la segunda ley de Newton a un sistema de masa de resorte
Dado que no analizamos sistemas que involucran resortes en la sección dinámica anterior, deberíamos suplir esa omisión ahora.
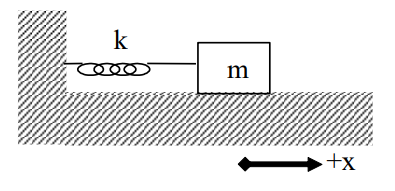
El sistema anterior consiste en un resorte con constante de resorte k unido a un bloque de masa m que descansa sobre una superficie sin fricción. El origen del sistema de coordenadas se ubica en la posición en la que el resorte está sin estirar.
Ahora imagina que el bloque se tira hacia la derecha y se suelta. Ojalá puedas convencerte de que el bloque oscilará de un lado a otro. Apliquemos la Segunda Ley de Newton en el instante en que la masa está en una posición arbitraria, x. La única fuerza que actúa sobre la masa en la dirección x es la fuerza del resorte.
\ [\ begin {alineado}
&\ Sigma f=M a\\
&F_ {\ text {spring}} =m a\\
&-k s=m a
\ end {alineado}\ nonumber\]
Debido a nuestra elección del sistema de coordenadas, el estiramiento de los muelles es exactamente igual a la ubicación del bloque (x). Por lo tanto,
\[-k x=m a \nonumber\]
Tenga en cuenta que cuando el bloque está en una posición positiva, la fuerza del resorte está en la dirección negativa y cuando el bloque está en una posición negativa, la fuerza del resorte está en la dirección positiva. Así, la fuerza del resorte siempre actúa para devolver el bloque al equilibrio.
Reordenando da
\ [\ begin {alineado}
&-\ frac {k} {m} x=a\\
&-\ frac {k} {m} x=\ frac {d^ {2} x} {d t^ {2}}
\ end {alineado}\ nonumber\]
y definiendo una constante,\(\omega^{2} \), como
(Concedido, parece bastante tonto definir\(\frac{k}{m}\) como el cuadrado de una constante, pero solo seguir el juego. También te puede resultar frustrante saber que este “omega” no es una velocidad angular. ¡El bloque ni siquiera tiene una velocidad angular!)
rendimientos,
\[-\omega^{2} x=\frac{d^{2} x}{d t^{2}} \nonumber\]
Por lo tanto, la función de posición para el bloque debe tener una segunda derivada de tiempo igual al producto de (\(-\omega^{2}\)) y a sí misma. Las únicas funciones cuya segunda derivada de tiempo es igual al producto de una constante negativa y en sí misma son las funciones seno y coseno. Por lo tanto, una solución a esta ecuación diferencial 5
\[-\omega^{2} x=\frac{d^{2} x}{d t^{2}} \nonumber\]
se puede escribir:
\[x(t)=A \cos (\omega t+\phi) \nonumber\]
o equivalentemente con la función seno, donde A y\(\phi\) son constantes arbitrarias. 6
- A es la amplitud de la oscilación. La amplitud es el desplazamiento máximo del objeto desde el equilibrio.
- \(\phi\)es el ángulo de fase. El ángulo de fase se utiliza para ajustar la función hacia adelante o hacia atrás en el tiempo. Por ejemplo, si la partícula está en el origen en t = 0 s,\(\phi\) debe ser igual\( +\pi / 2\) o\(-\pi / 2 \) para asegurar que la función coseno se evalúa a cero en t = 0 s. Si la partícula está en su posición máxima en t = 0 s, entonces el ángulo de fase debe ser cero o\(\pi\) para asegurar que la función coseno evalúa a +1 o -1 a t = 0 s.
- \(\omega\)es la frecuencia angular de la oscilación. 7
Nota
5 Una ecuación diferencial es una ecuación que involucra una función y su (s) derivada (s).
6 Para probarte a ti mismo que esta es efectivamente la solución a la ecuación, debes sustituir la función, x (t), en el lado izquierdo de la ecuación y la segunda derivada de x (t) en el lado derecho. Esto verificará que los dos lados de la ecuación son iguales. Además de verificar matemáticamente esta solución, debes verificar la solución físicamente dibujando una gráfica del movimiento que sabes que resultaría si el bloque se desplazara hacia la derecha y comparando ese boceto con un boceto de la función.
7 Nuevamente, tenga en cuenta que no\(\omega\) es la velocidad angular. El bloque no está rotando; no tiene una velocidad angular.
Tenga en cuenta que la función coseno se repite cuando su argumento aumenta en 2\(\pi\). Así, cuando
\[\Delta(\omega t+\phi)=2 \pi \nonumber\]
la función se repite. Dado que\(\omega\) y\(\phi\) son constantes,
\[\Delta(\omega t+\phi)=\omega \Delta t \nonumber\]
Por lo tanto, el intervalo de tiempo cuando
\[\omega \Delta t=2 \pi \nonumber\]
es el intervalo de tiempo para un ciclo completo del movimiento oscilatorio. El tiempo para un ciclo completo del movimiento se denomina periodo, T. Así,
\[T=\frac{2 \pi}{\omega} \nonumber\]
Por lo tanto, la significación física de la frecuencia angular es que es inversamente proporcional al periodo.
Sustituyendo en la definición de\(\omega\):
\[\omega=\sqrt{\frac{k}{m}} \nonumber\]
rendimientos
\[T=2 \pi \sqrt{\frac{m}{k}} \nonumber\]
En resumen, una masa unida a un resorte oscilará alrededor de su posición de equilibrio con una función de posición dada por:
\[x(t)=A \cos (\omega t+\phi) \nonumber\]
Esta función se repite con un periodo de
\[T=2 \pi \sqrt{\frac{m}{k}} \nonumber\]
Funciones de energía potencial
Las funciones de energía potencial para el trabajo realizado por gravedad y por resortes facilitan mucho el análisis de muchas situaciones. A la luz de esto, ¿por qué no construimos funciones energéticas potenciales para el trabajo realizado por cada tipo diferente de fuerza que posiblemente podría actuar sobre un objeto? Por supuesto, una razón es que hay demasiados tipos diferentes de fuerzas. Tener una función energética potencial para el trabajo realizado por cada uno de ellos conduciría a tantas funciones energéticas potenciales que sería difícil mantenerlas todas rectas.
Otra razón, más sutil, es que es imposible construir funciones energéticas potenciales para ciertas fuerzas. Una función energética potencial debe ser, por definición, una función. Matemáticamente hablando, una función de energía potencial de posición debe asignar un único valor específico de energía potencial a cada posición. Las funciones deben ser de un solo valor. Observe que las energías potenciales gravitacionales y elásticas son de un solo valor. Si especificas una altura fuera del suelo, o la deformación del muelle, la función de energía potencial te indica exactamente cuánta energía posee el sistema en esa posición, independientemente del camino que tomó el objeto para llegar a esa posición.
A la luz de esta observación, intentemos crear una función energética potencial para reemplazar el trabajo realizado por fricción.
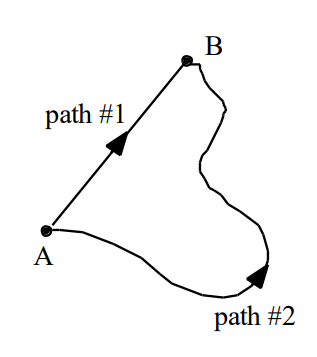
Imagínese deslizar un objeto a lo largo de una superficie rugosa del punto A al punto B. Si desliza el objeto a lo largo de la trayectoria #1, la fuerza de fricción hará cierta cantidad de trabajo sobre el objeto. (Este trabajo será negativo porque la dirección de la fuerza de fricción siempre está en oposición al cambio de posición del objeto).
Si deslizas el objeto a lo largo de la trayectoria #2, deberías ver que la magnitud del trabajo realizado por fricción será mayor. (Aunque la fuerza de fricción será la misma en magnitud, la distancia sobre la que actúa la fuerza de fricción será mayor. Así, se realizará una mayor cantidad de trabajo negativo por fricción.)
Ahora intentemos crear una función energética potencial para el trabajo realizado por fricción. Como siempre somos libres de elegir un sistema de coordenadas, podemos elegir un sistema en el que la energía potencial en A sea cero. ¿Cuál es el valor de la energía potencial en B? Ya que el trabajo realizado por fricción depende del camino que se tome de A a B, también lo debe hacer la energía potencial. Sin embargo, esto nos deja con una energía potencial en B que puede ser cualquiera de dos valores, ¡dependiendo del camino tomado! Dado que una función debe ser de un solo valor, el trabajo realizado por fricción no puede ser representado por una función. ¡No se puede crear una función energética potencial para el trabajo realizado por fricción!
También hay otras fuerzas cuyo trabajo no puede ser representado por una función energética potencial. En general, las fuerzas cuyo trabajo puede ser representado por una función energética potencial se llaman fuerzas conservadoras, mientras que aquellas para las que no se pueden construir funciones energéticas potenciales se llaman no conservadoras.
Actividades
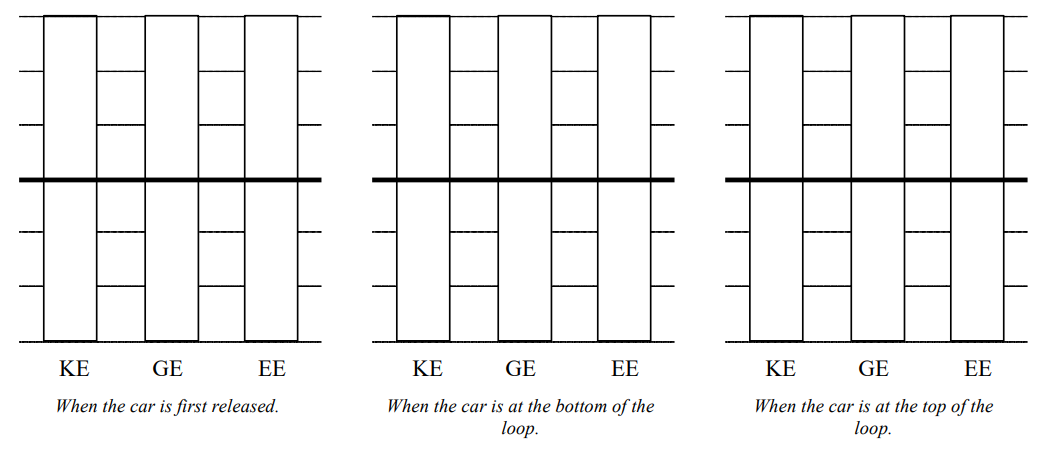
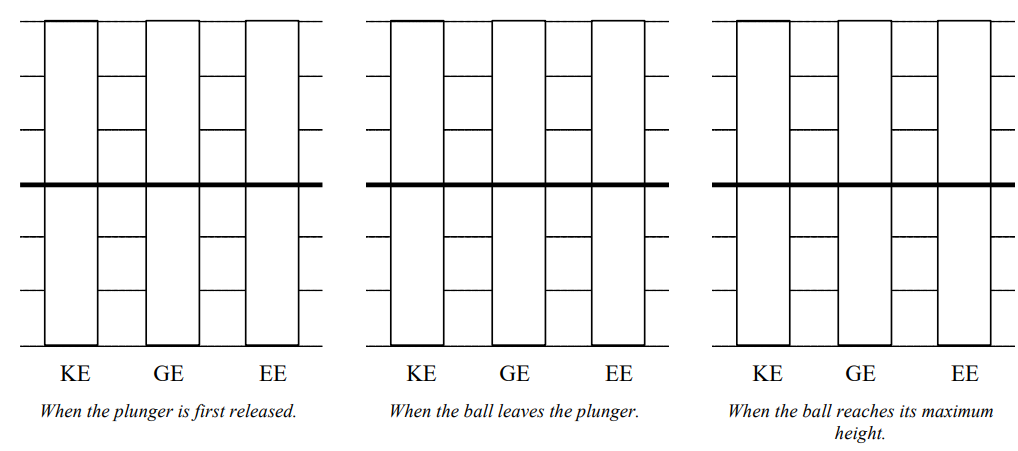
Para cada uno de los escenarios descritos a continuación, indique la cantidad de energía cinética, energía potencial gravitacional y energía elástica en el sistema en cada uno de los eventos enumerados. Use una escala consistente a lo largo de ambos movimientos.
a. Un saltador bungee de 75 kg se baja de una plataforma muy por encima de un río furioso y se desploma hacia abajo. El cordón elástico elástico tiene una constante elástica efectiva de 50 N/m e inicialmente está flojo, aunque comienza a estirarse en el momento en que el saltador se baja de la plataforma. Establecer el punto más bajo del puente como el punto cero de la energía potencial gravitacional

b. Un puente bungee de 75 kg se baja de una plataforma muy por encima de un río furioso y se desploma hacia abajo. El cordón elástico elástico tiene una constante elástica efectiva de 50 N/m e inicialmente está flojo, aunque comienza a estirarse en el momento en que el saltador se baja de la plataforma. Establecer la plataforma como el punto cero de la energía potencial gravitacional
Para cada uno de los escenarios descritos a continuación, indique la cantidad de energía cinética, energía potencial gravitacional y energía elástica en el sistema en cada uno de los eventos enumerados. Usa una escala consistente a lo largo de cada movimiento. Establecer la posición inicial del objeto como el punto cero de la energía potencial gravitacional

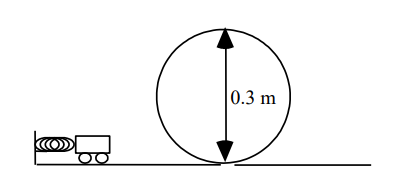
a. Un carro de juguete de 0.27 kg se mantiene en reposo contra un muelle comprimido de 84 N/m. Al ser liberado, el automóvil recorre alrededor de un bucle de 0.30 m de altura. La velocidad del automóvil en la parte superior del bucle es de 2.2 m/s Supongamos que la fricción es tan pequeña que puede ignorarse.
b. se lanza un pinball de 0.10 kg a una máquina de pinball por medio de un émbolo, se tira hacia atrás 8.0 cm y se libera. La superficie de la máquina de pinball está inclinada a 13 0 desde la horizontal. Supongamos que la fricción entre la bola y la superficie de la máquina de pinball durante el lanzamiento de la bola es tan pequeña que puede ignorarse.
Seis cajas de diferente masa cuelgan en reposo de seis resortes. Cada resorte tiene una rigidez (k), una longitud natural (L 0) y una longitud de corriente (L). La longitud natural del resorte es su longitud antes de que la caja se cuelgue de él. La longitud actual del resorte es su longitud cuando la caja se cuelga de él.
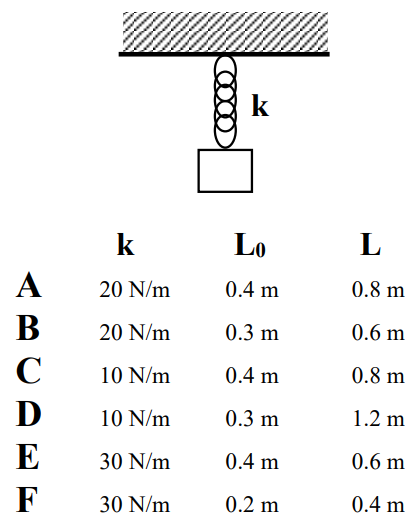
a. Clasificar la magnitud de la fuerza de cada resorte que actúa sobre cada caja.
Mayor 1. _____ 2. _____ 3. _____ 4. _____ 5. _____ 6. _____ Más pequeño
_____ El ranking no se puede determinar con base en la información proporcionada.
Explica el motivo de tu ranking:
b. Clasificar la masa de cada caja.
Mayor 1. _____ 2. _____ 3. _____ 4. _____ 5. _____ 6. _____ Más pequeño
_____ El ranking no se puede determinar con base en la información proporcionada.
Explica el motivo de tu ranking:
Seis cajas de diferente masa (m) están unidas a muelles de diferente rigidez (k). Las masas se mantienen en su lugar de tal manera que ninguno de los resortes se estira inicialmente. Todos los muelles son inicialmente de la misma longitud. Las masas se liberan y los resortes se estiran.
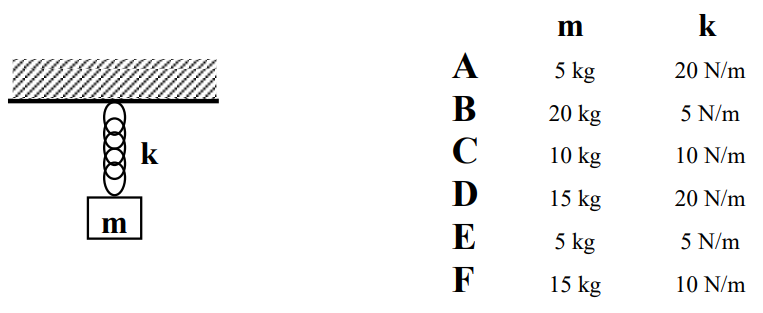
a. Clasificar el alargamiento máximo del muelle en cada sistema.
Mayor 1. _____ 2. _____ 3. _____ 4. _____ 5. _____ 6. _____ Más pequeño
_____ El ranking no se puede determinar con base en la información proporcionada.
b. Clasifica la velocidad máxima de la cesta en cada sistema.
Mayor 1. _____ 2. _____ 3. _____ 4. _____ 5. _____ 6. _____ Más pequeño
_____ El ranking no se puede determinar con base en la información proporcionada.
c. Clasificar la magnitud máxima de aceleración de la caja en cada sistema.
Mayor 1. _____ 2. _____ 3. _____ 4. _____ 5. _____ 6. _____ Más pequeño
_____ El ranking no se puede determinar con base en la información proporcionada.
Explica el motivo de tus rankings:
Seis cajas de masa idéntica están en reposo en seis resortes. Cada muelle tiene una longitud natural (L 0) y una longitud actual (L). La longitud natural del resorte es su longitud antes de que la caja se coloque encima de ella. La longitud actual del resorte es su longitud cuando la caja está encima de ella.
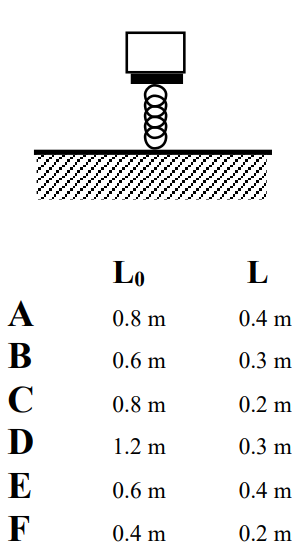
a. Clasificar la magnitud de la fuerza del resorte que actúa sobre cada caja.
Mayor 1. _____ 2. _____ 3. _____ 4. _____ 5. _____ 6. _____ Más pequeño
_____ El ranking no se puede determinar con base en la información proporcionada.
Explica el motivo de tus rankings:
b. Clasificar la rigidez de cada muelle.
Mayor 1. _____ 2. _____ 3. _____ 4. _____ 5. _____ 6. _____ Más pequeño
_____ El ranking no se puede determinar con base en la información proporcionada.
Explica el motivo de tus rankings:
Seis cajas de diferente masa (m) están en reposo en seis muelles. Cada muelle tiene una longitud natural (L 0) y una longitud actual (L). La longitud natural del resorte es su longitud antes de que la caja se coloque encima de ella. La longitud actual del resorte es su longitud cuando la caja está encima de ella.

a. Clasificar la rigidez de cada muelle.
Mayor 1. _____ 2. _____ 3. _____ 4. _____ 5. _____ 6. _____ Más pequeño
_____ El ranking no se puede determinar con base en la información proporcionada.
Explica el motivo de tus rankings:
b. Clasificar la energía potencial elástica almacenada en cada muelle
Mayor 1. _____ 2. _____ 3. _____ 4. _____ 5. _____ 6. _____ Más pequeño
_____ El ranking no se puede determinar con base en la información proporcionada.
Explica el motivo de tus rankings:
Un péndulo de masa m se libera del reposo desde un ángulo\(\theta\) desde la vertical. Todos los péndulos tienen la misma longitud.

Clasificar la velocidad máxima de cada péndulo.
Mayor 1. _____ 2. _____ 3. _____ 4. _____ 5. _____ 6. _____ Más pequeño
_____ El ranking no se puede determinar con base en la información proporcionada.
Explica el motivo de tus rankings:
Un péndulo de masa m se mueve a velocidad v a medida que pasa por la vertical. Todos los péndulos tienen la misma longitud.
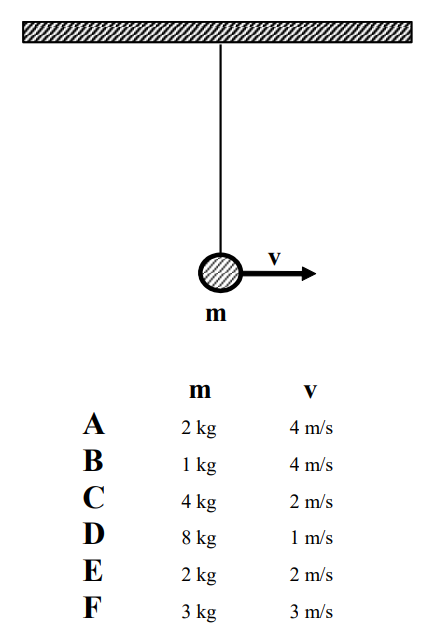
Clasificar el ángulo máximo desde la vertical alcanzado por el péndulo.
Mayor 1. _____ 2. _____ 3. _____ 4. _____ 5. _____ 6. _____ Más pequeño
_____ El ranking no se puede determinar con base en la información proporcionada.
Explica el motivo de tus rankings:
Un cohete de 100 kg se dispara verticalmente hacia arriba. Su motor suministra una fuerza ascendente de magnitud F = (5000 — 5.0t 2) N (donde t está en segundos) hasta F = 0 N, luego el motor se apaga.
a. ¿Qué tan rápido se mueve el cohete cuando el motor se apaga?
Diagrama de cuerpo libre
Análisis Matemático 38
Evento 1:
Evento 2:
b. ¿Cuánto tiempo tarda el cohete en alcanzar su altura máxima?
Diagrama de cuerpo libre
Análisis matemático
Evento 1:
Evento 2:
Un cohete de 75 kg se lanza directamente hacia arriba. La fuerza sobre el cohete debido a su motor aumenta de 0 N a 5000 N en 8.0 s en función lineal del tiempo. El empuje luego cae a cero casi instantáneamente.
a. ¿Qué tan rápido se mueve el cohete cuando el motor se apaga?
Diagrama de cuerpo libre
Análisis matemático 39
Evento 1:
Evento 2:
b. ¿Cuánto tiempo tarda el cohete en alcanzar su altura máxima?
Diagrama de cuerpo libre
Análisis matemático
Evento 1:
Evento 2:
Un cohete de 75 kg se lanza directamente hacia arriba. El cohete viaja a una velocidad de 200 m/s cuando su motor se apaga. La fuerza sobre el cohete debido a su motor disminuye a 0 N en 22 s como una función cuadrática del tiempo.
¿Cuál es el empuje máximo que actúa sobre el cohete?
Diagrama de cuerpo libre
Análisis Matemático 40
Evento 1:
Evento 2:
El empuje horizontal que actúa sobre un trineo cohete de 270 kg aumenta como una función cúbica del tiempo de 0 N a 5400 N en 4.3 s. El empuje luego cae a cero casi instantáneamente. El coeficiente de fricción efectivo que actúa entre el trineo del cohete y el suelo es (0.4, 0.3). El trineo cohete parte del reposo sobre una superficie nivelada.
¿Qué tan rápido se mueve el trineo cohete cuando el motor se apaga?
Diagrama de cuerpo libre
Análisis Matemático 41
Evento 1:
Evento 2:
El empuje horizontal que actúa sobre un trineo cohete de 270 kg disminuye de 8000 N a 0 N en función cuadrática del tiempo. El trineo cohete viaja a 195 m/s cuando el motor se apaga. El coeficiente de fricción efectivo que actúa entre el trineo del cohete y el suelo es (0.4, 0.3). El trineo cohete parte del reposo sobre una superficie nivelada.
¿Cuál es el tiempo total transcurrido entre el encendido del motor y el trineo finalmente llegando a descansar?
Diagrama de cuerpo libre
Análisis Matemático 42
Evento 1:
Evento 2:
Un saltador bungee de 75 kg está a punto de bajar de una plataforma muy por encima de un río furioso y caer en picado hacia abajo. El cordón elástico elástico tiene una constante elástica efectiva de 50 N/m e inicialmente está flojo, aunque comienza a estirarse en el momento en que el saltador se baja de la plataforma.
a. ¿Qué tan lejos cae el puente bungee?
Diagrama de cuerpo libre

Análisis Matemático 43
Evento 1:
Evento 2:
b. ¿Cuál es la velocidad máxima del puente bungee?
Diagrama de cuerpo libre
Análisis matemático
Evento 1:
Evento 2:
Un puente bungee de 75 kg está a punto de bajar de una plataforma 65 m sobre un río furioso y caer en picado hacia abajo. Espera mojarse solo la parte superior de la cabeza. El cordón elástico elástico actúa como un resorte lineal e inicialmente está flojo, aunque comienza a estirarse en el momento en que el saltador se baja de la plataforma.
a. ¿Cuál es la constante elástica del cordón elástico?
Diagrama de cuerpo libre
Análisis Matemático 44
Evento 1:
Evento 2:
b. ¿Cuál es la velocidad máxima del puente bungee?
Diagrama de cuerpo libre
Análisis matemático
Evento 1:
Evento 2:
Un saltador bungee de 45 kg está a punto de bajar de una plataforma 65 m sobre un río furioso y caer en picado hacia abajo. Ella espera mojarse solo la parte superior de la cabeza. El cordón elástico elástico actúa como un resorte lineal e inicialmente está flojo. El cordón no comienza a estirarse hasta que el saltador haya caído 10 m.
a. ¿Cuál es la constante elástica del cordón elástico?
Diagrama de cuerpo libre
Análisis Matemático 45
Evento 1:
Evento 2:
b. ¿Cuál es la velocidad máxima del puente bungee?
Diagrama de cuerpo libre
Análisis matemático
Evento 1:
Evento 2:
Un puente elástico de 55 kg está a punto de bajar de una plataforma 45 m sobre un río furioso y caer en picado hacia abajo. Ella espera mojarse solo la parte superior de la cabeza. El cordón elástico elástico actúa como un resorte lineal con resorte constante de 30 N/m e inicialmente está flojo, pero no comienza a estirarse inmediatamente cuando se baja de la plataforma.
a. ¿Hasta dónde puede caer con seguridad antes de que el cordón elástico comience a estirarse?
Diagrama de cuerpo libre
Análisis Matemático 46
Evento 1:
Evento 2:
b. ¿Qué tan rápido se mueve cuando golpea el río si cae 15 m antes de que la cuerda elástica comience a estirarse?
Diagrama de cuerpo libre
Análisis matemático
Evento 1:
Evento 2:
Se lanza un pinball de 0.10 kg a una máquina de pinball por medio de un émbolo, se tira hacia atrás 8.0 cm y se libera. La superficie de la máquina de pinball está inclinada a 13 0 desde la horizontal. Se requiere una fuerza de 12 N para tirar del émbolo hacia atrás 5.0 cm. Supongamos que la fricción entre la bola y la superficie de la máquina de pinball durante el lanzamiento de la bola es tan pequeña que puede ignorarse.
a. ¿Cuál es la velocidad de la bola cuando sale del émbolo?
Diagrama de cuerpo libre
Análisis Matemático 47
Evento 1:
Evento 2:
b. ¿Qué tan lejos recorre la bola después de dejar el émbolo, asumiendo que la fricción es lo suficientemente pequeña como para ser ignorada?
Diagrama de cuerpo libre
Análisis matemático
Evento 1:
Evento 2:
En un centro de distribución UPS, una caja de 40 kg se desliza por una rampa de 8° a 3 m/s. En la parte inferior de la rampa, a 8 m de distancia, hay un resorte de 150 N/m diseñado para que la caja descanse. El coeficiente de fricción entre la caja y la rampa es (0.2, 0.1).
a. ¿Cuál es la velocidad de la caja cuando golpea el resorte?
Diagrama de cuerpo libre
Análisis Matemático 48
Evento 1:
Evento 2:
b. ¿Qué tan lejos se comprime el resorte antes de llevar la caja a descansar?
Diagrama de cuerpo libre
Análisis matemático
Evento 1:
Evento 2:
Un carro de juguete de 0.27 kg se mantiene en reposo contra un resorte comprimido de 84 N/m. Al ser liberado, el automóvil recorre alrededor de un bucle de 0.30 m de altura. La velocidad del automóvil en la parte superior del bucle es de 2.2 m/s Supongamos que la fricción es tan pequeña que puede ignorarse.
a. ¿Cuál es la compresión inicial del lanzador?
Diagrama de cuerpo libre

Análisis Matemático 49
Evento 1:
Evento 2:
b. ¿Con qué velocidad entra el carrito al bucle?
Diagrama de cuerpo libre
Análisis matemático
Evento 1:
Evento 2:
Un cohete de masa m es disparado verticalmente hacia arriba. La interacción entre su motor y el entorno produce una fuerza ascendente de magnitud F = F max - Ct 2 N (donde t es en segundos) hasta F = 0 N, luego el motor se apaga. Determine la velocidad del cohete en el instante en que el motor se apaga, v apagado, en función de F max, C, m y g.
Diagrama de cuerpo libre
Análisis matemático
Evento 1:
Evento 2:
Preguntas
Si C = 0 N/s 2, ¿qué debería ser igual v off? ¿Su función concuerda con esta observación?
Si F max < mg, ¿qué debería ser igual a v off? ¿Su función concuerda con esta observación?
Un puente elástico de masa m está a punto de bajar de una plataforma a una distancia D por encima de un barranco rocoso y caer en picado hacia abajo. Espera no ensangrentarse la parte superior de la cabeza. El cordón elástico elástico actúa como un resorte lineal e inicialmente está flojo. El cable no comienza a estirarse hasta que el puente haya caído una distancia d. Determinar la constante elástica mínima (k) necesaria para un salto seguro en función de m, g, D y d.
Diagrama de cuerpo libre
Análisis matemático
Evento 1:
Evento 2:
Preguntas
Si g = 0 m, ¿qué debería ser k igual? ¿Su función concuerda con esta observación?
Si d = D, ¿qué debería ser k igual? ¿Su función concuerda con esta observación?
Si m es el doble de grande, ¿qué efecto tendrá esto en k?
Un pinball de masa m se lanza a una máquina de pinball por medio de un émbolo accionado por resorte que se retira una distancia s y se libera. La superficie de la máquina de pinball está inclinada\(theta\) desde la horizontal. Determinar la velocidad de la bola a medida que sale del émbolo (v 0) en función de m, s\(\theta\), g, y la constante elástica efectiva del sistema de émbolo. Supongamos que la fricción entre la bola y la superficie de la máquina de pinball durante el lanzamiento de la bola es tan pequeña que puede ignorarse.
Diagrama de cuerpo libre
Análisis matemático
Evento 1:
Evento 2:
Preguntas
Si s = 0 m, ¿qué debería ser igual v 0? ¿Su función concuerda con esta observación?
Si k = 0 N/m, ¿qué debería ser igual v 0? ¿Su función concuerda con esta observación?
Si el émbolo se tira hacia atrás el doble de distancia, ¿qué efecto tendrá esto en la v 0?
Un carro de juguete de masa m se sostiene en reposo contra un resorte comprimido. Al ser liberado, el auto viaja alrededor de un bucle. Determinar la velocidad del carro (v) en función de la posición angular del carro en el bucle (dejar que la recta hacia abajo sea\(\theta\) =0°), la constante elástica (k), la compresión inicial del muelle (s), H, m y g Supongamos que la fricción es tan pequeña que puede ignorarse.

Diagrama de cuerpo libre
Análisis matemático
Evento 1:
Evento 2:
Preguntas
Si s = 0 m, ¿qué debería ser igual v? ¿Su función concuerda con esta observación?
Si k = 0 N/m, ¿qué debería ser igual v? ¿Su función concuerda con esta observación?
Si\(\theta\) = 0°, ¿qué debería ser v igual? ¿Su función concuerda con esta observación?
- Respuestas Seleccionadas
-
1 v3 = 8.83 m/s
2 t3 = 55.5 s
3 r2 bmw = 51.7 m
4 t2 bmw = 30 s
5 v2 bmw = 74.1 m/s
6 r2 bmw = 71.5 m
7 t2 bmw = 2.8 s
8 t = 4.9 s
9 t3 = 11.6 s
10 t2 = 9.3 s
11 t3 = 19.3 s
12 r\(\rho\) = 2.97 m
13 t2 = 28.3 s
14\(\theta\) 2 = 2.1 rad
15 t2 = 30.2 s
16 t2 = 4.46 s
17 v2 = 28.5 m/s
18\(\theta\) 3 = 74.7 rad
19\(\theta\) 3 = 68,4 rad
20 t3 = 108 s
21 t4 = 27.8 s
22 t3 = 26.2 s
23 V2b = 278 m/s
24 R2b = 950 m
25 t4 = 8.96 s
26 t3 = 87.1 s
27 a. v = 14.0 m/s b. v = 16.3 m/s
28 a.\(\omega\) = 0.224 rad/s b. F = 636 N
29 a. F = 14.2 N b. F = 15.7 N
30 a. F = 1114 N b. F = 1810 N
Cuerda superior 31 F = 44 N
32\(\theta\) = 76.8°
33 vmax = 17.1 m/s
34\(\theta\) = 5.8°
35 vmax = 30 m/s
¡36 demasiado rápido!
37\(\omega\) min = 2 rad/s
38 a. v2 = 746 m/s b. t3 = 107.7 s
39 a. v2 = 194 m/s b. t3 = 27.8 s
40 Fmáx = 2125 N
41 v = 13.7 m/s
42 t = 11.6 s
43 a.\(\delta\) r = 29.4 m b. v2 = 12 m/s
44 a. k = 22.6 N/m b. v2 = 17.9 m/s
45 a. k = 19 N/m b. v2 = 20.6 m/s
46 a. d = 4.8 m b. v = 19.8 m/s
47 a. v2 = 3.87 m/s b.\(\delta\) r = 3.4 m
48 a. v2 = 3.91 m/s b. s = 2.13 m
49 a. s = 0.19 m b. v2 = 3.27 m/s