10: El Péndulo Simple


- Última actualización
- 30 oct 2022
- Guardar como PDF

( \newcommand{\kernel}{\mathrm{null}\,}\)
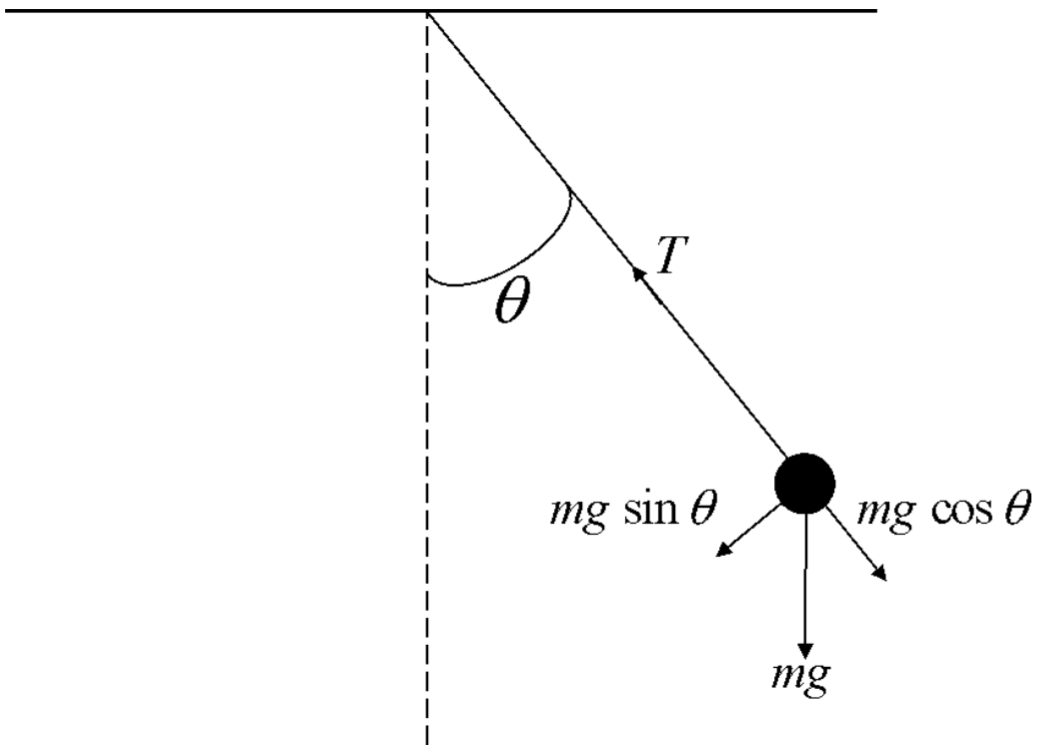
Primero consideramos el péndulo simple que se muestra en la Fig. 10.1. Una masa se une a una varilla rígida sin masa, y se limita a moverse a lo largo de un arco de un círculo centrado en el punto de pivote. Supongamos quel es la longitud fija de la biela, yθ es el ángulo que hace con el eje vertical. Derivaremos las ecuaciones gobernantes para el movimiento de la masa, y una ecuación que puede resolverse para determinar el período de oscilación.
Ecuaciones de gobierno
Las ecuaciones gobernantes para el péndulo se derivan de la ecuación de Newton,F=ma. Debido a que el péndulo está constantado para moverse a lo largo de un arco, podemos escribir la ecuación de Newton directamente para el desplazamientos del péndulo a lo largo del arco con origen en la parte inferior y positivo dirección a la derecha.
La fuerza relevante sobre el péndulo es la componente de la fuerza gravitacional a lo largo del arco, y de la Fig. 10.1se ve que es
Fg=−mgsinθ,
donde el signo negativo significa una fuerza que actúa a lo largo de las dirección negativa cuando0<θ<π, y las dirección positiva cuando−π<θ<0.
La ecuación de Newton para el péndulo simple que se mueve a lo largo del arco es por lo tanto
m¨s=−mgsinθ.
Ahora, la relación entre la longitud del arcos y el ánguloθ viene dada pors=lθ, y por lo tanto¨s=l¨θ. La ecuación simple del péndulo se puede escribir entonces en términos del ánguloθ como
¨θ+ω2sinθ=0,
con
ω=√g/l
La aproximación estándar de ángulo pequeñosinθ≈θ da como resultado la conocida ecuación para el oscilador armónico simple,
¨θ+ω2θ=0.
Hemos derivado las ecuaciones de movimiento suponiendo que el péndulo está limitado a moverse a lo largo del arco de un círculo. Tal restricción es válida siempre que la masa del péndulo esté conectada a una varilla rígida sin masa. Si la varilla es reemplazada por un resorte sin masa, digamos, entonces pueden ocurrir oscilaciones en la longitud del resorte. Derivar las ecuaciones para esta situación física más general requiere considerar la forma vectorial de la ecuación de Newton.
Es informativo construir las ecuaciones gobernantes equivalentes en coordenadas polares. Para ello, formamos la coordenada complejaz=x+iy, y hacemos uso de la forma polar paraz, dada por
z=reiθ.
Las ecuaciones gobernantes se convierten entonces
d2dt2(reiθ)=g−Tmeiθ
La segunda derivada se puede calcular usando las reglas de producto y cadena, y uno encuentra
d2dt2(reiθ)=((¨r−r˙θ2)+i(r¨θ+2˙r˙θ))eiθ.
Dividiendo ambos lados de(10.7) poreiθ, obtenemos
(¨r−r˙θ2)+i(r¨θ+2˙r˙θ)=ge−iθ−Tm.
Las dos ecuaciones gobernantes en coordenadas polares, entonces, se determinan equiparando las partes reales y las partes imaginarias de(10.9), y encontramos
¨r−r˙θ2=gcosθ−Tmr¨θ+2˙r˙θ=−gsinθ
Si el conector es una varilla rígida, como asumimos inicialmente, entoncesr=l,˙r=0, y¨r=0. La primera ecuación(10.10) es entonces una ecuación para la tensiónT en la varilla, y la segunda ecuación (10.11) reduce a nuestra derivada previamente (10.3). Si el conector es un resorte, entonces se puede aplicar la ley de Hooke. Supongamos que la constante de resorte esk y el resorte no estirado tiene longitudl. Entonces
T=k(r−l)
en(10.10), y un par de ecuaciones simultáneas de segundo orden gobiernan el movimiento. El equilibrio estable con la masa en reposo en el fondo satisfaceθ=0 yr=l+mg/k; es decir, el resorte se estira para contrarrestar la masa colgante.
Periodo de movimiento
En general, el periodo del péndulo simple depende de la amplitud de su movimiento. Para pequeñas oscilaciones de amplitud, la ecuación de péndulo simple se(10.3) reduce a la ecuación de oscilador armónico simple (10.5), y el período se vuelve independiente de la amplitud. La solución general de la ecuación simple del oscilador armónico se puede escribir como
θ(t)=Acos(ωt+φ)
Condiciones iniciales sobreθ y˙θ determinarA yφ, y redefiniendo el origen del tiempo, siempre se puede elegirφ=0 yA>0. Con esta elección,A=θm, la amplitud máxima del péndulo, y la solución analítica de(10.5) es
θ(t)=θmcosωt
dondeω se llama la frecuencia angular de oscilación. El período de movimiento está relacionado con la frecuencia angular por
T=2π/ω,
y es independiente de la amplitudθm.
Si ya nosinθ≈θ es una aproximación válida, entonces necesitamos resolver la ecuación de péndulo simple (10.3). Primero derivamos una expresión analítica de forma cerrada, y luego explicamos cómo calcular una solución numérica.
Solución analítica
Un procedimiento estándar para resolver ecuaciones diferenciales desconocidas es tratar de determinar alguna combinación de variables que sea independiente del tiempo. Aquí, podemos multiplicar(10.3) por˙θ para obtener
˙θ¨θ+ω2˙θsinθ=0.
Ahora,
˙θ¨θ=ddt(12˙θ2),˙θsinθ=ddt(−cosθ),
para que(10.16) pueda escribirse como
ddt(12˙θ2−ω2cosθ)=0
La combinación de variables entre paréntesis es, por lo tanto, independiente del tiempo y se denomina integral de movimiento. También se dice que se conserva, y(10.18) se le llama ley de conservación. En física, esta integral del movimiento (multiplicada porml2) se identifica con la energía del oscilador.
El valor de esta integral de movimientot=0 es dado por−ω2cosθm, por lo que la ley de conservación derivada toma la forma
12˙θ2−ω2cosθ=−ω2cosθm,
que es una ecuación diferencial de primer orden separable.
Podemos calcular el periodo de oscilaciónT como cuatro veces el tiempo que tarda el péndulo en pasar de su altura inicial al fondo. Durante este trimestre de ciclo de oscilación, dedθ/dt<0 manera que a partir de (10.19),
dθdt=−√2ω√cosθ−cosθm.
Después de separarnos e integrarnos durante un trimestre, tenemos
∫T/40dt=−√22ω∫0θmdθ√cosθ−cosθm
o
T=2√2ω∫θm0dθ√cosθ−cosθm
Podemos transformar esta ecuación para el periodo en una forma más estándar usando una identidad trigonométrica y una sustitución. La identidad de trazo es la conocida fórmula de medio ángulo para el pecado, dada por
sin2(θ/2)=12(1−cosθ)
Usando esta identidad, escribimos
cosθ=1−2sin2(θ/2),cosθm=1−2sin2(θm/2)
y sustituir (10.24) en (10.19) resulta en
T=2ω∫θm0dθ√sin2(θm/2)−sin2(θ/2).
Ahora definimos la constante
a=sin(θm/2)
y realizar la sustitución
sinϕ=1asin(θ/2)
Desarrollando esta sustitución, tenemos
cosϕdϕ=12acos(θ/2)dθ.
Ahora,
cos(θ/2)=√1−sin2(θ/2)=√1−a2sin2ϕ
para que(10.28) pueda resolverse paradθ:
dθ=2acosϕ√1−a2sin2ϕdϕ.
Utilizando(10.27), el dominio de integraciónθ∈[0,θm] se transforma enϕ∈[0,π/2]. Por lo tanto, sustituyendo (10.27) y (10.29) en (10.25) da como resultado la ecuación estándar para el periodo dado por
T=4ω∫π/20dϕ√1−a2sin2ϕ
cona dado por (10.26). La integralT=T(a) se llama la integral elíptica completa del primer tipo.
Para pequeñas amplitudes de oscilación, es posible determinar la dependencia del orden de avance del período sobreθm. Ahoraa se da por(10.26), para que una serie de Taylor a los rendimientos de orden principal
a2=14θ2m+O(θ4m)
De igual manera, la expansión de la serie Taylor del integrando de(10.30) viene dada por
1√1−a2sin2ϕ=1+12a2sin2ϕ+O(a4)=1+18θ2msin2ϕ+O(θ4m)
Por lo tanto, a partir de (10.30),
T=4ω∫π/20dϕ(1+18θ2msin2ϕ)+O(θ4m)
Usando
∫π/20dϕsin2ϕ=π4
tenemos
T=2πω(1+θ2m16)+O(θ4m)
Solución numérica
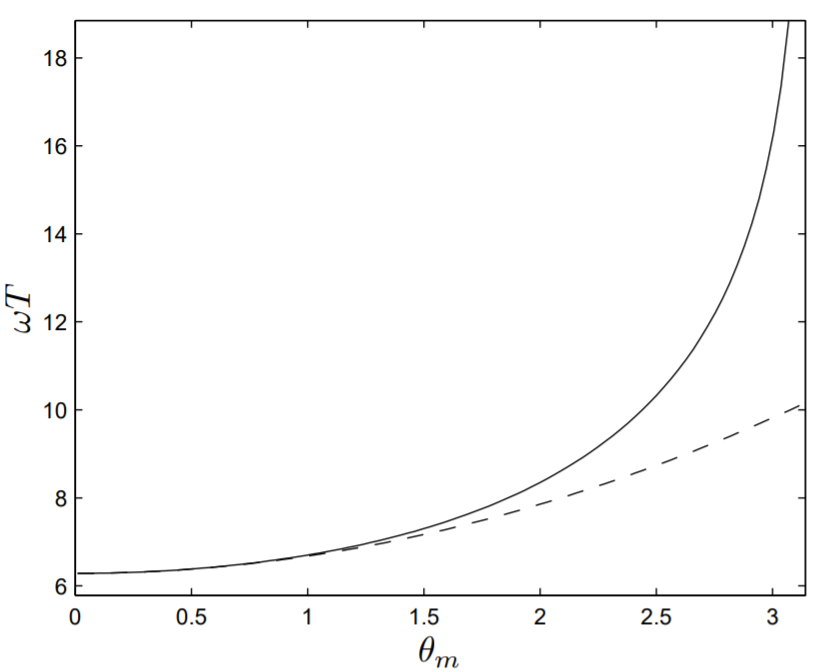
Se discuten aquí dos métodos para computar el periodo del pénduloT=T(θm) en función de la amplitud máxima. El periodo se puede encontrar en unidades deω−1; es decir, calculamosωT.
El primer método hace uso de nuestro trabajo analítico y realiza una integración numérica de (10.30). Los algoritmos para la integración numérica se discuten en el Capítulo 3. En particular, se puede hacer uso de la cuadratura adaptativa de Simpson, implementada en la función de MATLAB quad. m.
El segundo método, que es igual de razonable, resuelve directamente la ecuación diferencial (10.3). No dimensionalizar usandoτ=ωt, la ecuación(10.3) se convierte en
d2θdτ2+sinθ=0
Para resolverlo(10.35), escribimos esta ecuación de segundo orden como el sistema de dos ecuaciones de primer orden
dθdτ=u,dudτ=−sinθ,
con condiciones inicialesθ(0)=θm yu(0)=0. Luego determinamos el tiempo (adimensional) requerido para que el péndulo se mueva a la posiciónθ=0: esta vez será igual a una cuarta parte del período de movimiento
Los algoritmos para la integración de ecuaciones diferenciales ordinarias se discuten4. en Capítulo En particular, se puede hacer uso de una(4,5) fórmula Runge-Kutta, el par Príncipe Dormand-Prince, que se implementa en la función de MATLAB ode45.m.
Quizás la forma más sencilla de calcular el periodo es hacer uso de la propiedad Ubicación del evento del solucionador de oda MATLAB. A través de la opción odeset, es posible instruir45.m a oda para que finalice la integración de tiempo cuandoθ=0 se produzca el evento, y que devuelva la hora en la que se lleva a cabo este evento.
En la Fig. 10.2θm se muestra una gráfica del periodo adimensionalωT versus la amplitud. Para comparación, el resultado analítico de orden bajo de(10.34) se muestra como la línea discontinua.