
1.1: Sistemas de coordenadas
- Page ID
- 86795
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\(\newcommand{\longvect}{\overrightarrow}\)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)Un sistema de coordenadas es una forma de especificar de manera única la ubicación de cualquier posición en el espacio con respecto a un origen de referencia. Cualquier punto se define por la intersección de tres superficies mutuamente perpendiculares. Los ejes de coordenadas son entonces definidos por las normales a estas superficies en el punto. Por supuesto, la solución a cualquier Problema siempre es independiente de la elección del sistema de coordenadas utilizado, pero al aprovechar la simetría, el cálculo a menudo se puede simplificar mediante la elección adecuada de la descripción de coordenadas. En este texto solo utilizamos los sistemas de coordenadas familiares rectangulares (cartesianos), cilíndricos circulares y esféricos.
Coordenadas rectangulares (cartesianas)
El sistema de coordenadas más común y a menudo preferido se define por la intersección de tres planos mutuamente perpendiculares como se muestra en la Figura 1-la. Las líneas paralelas a las líneas de intersección entre planos definen los ejes de coordenadas (x, y, z), donde el eje x se encuentra perpendicular al plano de la constante x, el eje y es perpendicular al plano de la constante y, y el eje z es perpendicular al plano de la constante z. Una vez que se selecciona un origen con coordenada (0, 0, 0), cualquier otro punto del plano se encuentra especificando sus distancias dirigidas x, y dirigidas por z desde este origen como se muestra para los puntos de coordenadas ubicados en la Figura 1-1b.
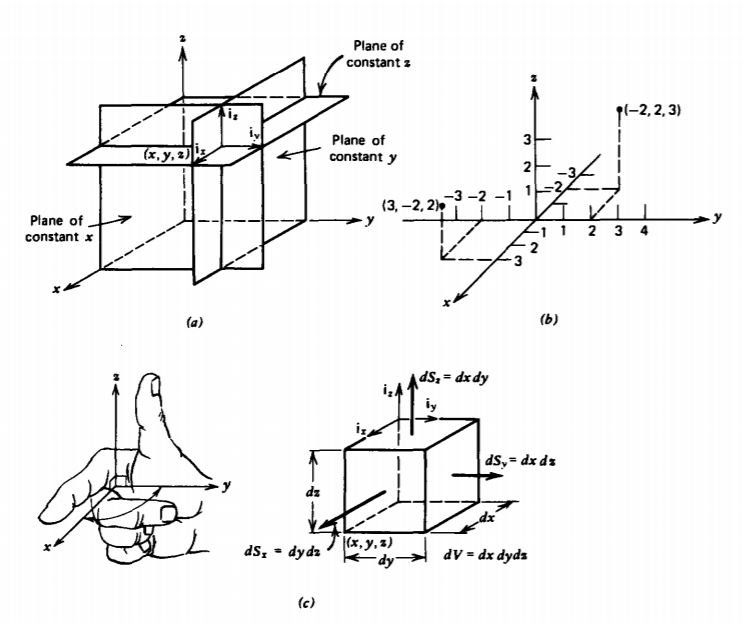
Por convención, siempre se usa un sistema de coordenadas diestro mediante el cual uno riza los dedos de su mano derecha en la dirección de x a y de manera que el índice esté en la dirección x y el dedo medio esté en la dirección y. El pulgar entonces apunta en la dirección z. Esta convención es necesaria para eliminar ambigüedades direccionales en teoremas que se derivarán posteriormente.
Las direcciones de coordenadas están representadas por los vectores unitarios i x, i y i z, cada uno de los cuales tiene una longitud unitaria y apunta en la dirección a lo largo de uno de los ejes de coordenadas. Las coordenadas rectangulares suelen ser las más simples de usar porque los vectores unitarios siempre apuntan en la misma dirección y no cambian de dirección de punto a punto.
Se forma un volumen diferencial rectangular cuando uno se mueve desde un punto (x, y, z) por una distancia incremental dx, dy y dz en cada una de las tres direcciones de coordenadas como se muestra en la Figura 1-1c. Para distinguir los elementos de superficie subindicamos el elemento de área de cada cara con la coordenada perpendicular a la superficie.
Coordenadas cilíndricas circulares
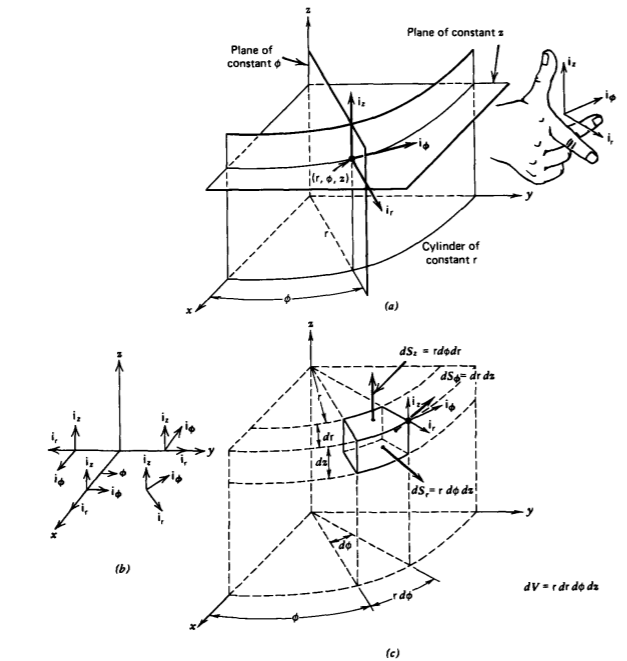
El sistema de coordenadas cilíndricas es conveniente de usar cuando hay una línea de simetría que se define como el eje z. Como se muestra en la Figura 1-2a, cualquier punto en el espacio se define por la intersección de las tres superficies perpendiculares de un cilindro circular de radio r, un plano a z constante y un plano en ángulo constante\(\phi\) desde el eje x.
Los vectores unitarios i r \(\phi\), i e i x son perpendiculares a cada una de estas superficies. La dirección de i x es independiente de la posición, pero a diferencia de los vectores unitarios rectangulares, la dirección de i r e i \(\phi\)cambia con el ángulo\(\phi\) como se ilustra en la Figura 1-2b. Por ejemplo, cuando\(\phi\) = 0 entonces i r = i x, e i \(\phi\)= i y, mientras que si\(\phi = \pi/2\), entonces i r = i y y i \(\phi\)= - i x.
Por convención, el triplete (r,\(\phi\), z) debe formar un sistema de coordenadas a la derecha para que curvar los dedos de la mano derecha de i r a i \(\phi\)ponga el pulgar en la dirección z.
Una sección de volumen cilíndrico de tamaño diferencial, mostrada en la Figura 1-2 c, se forma cuando uno se mueve desde un punto en la coordenada (r\(\phi\),, z) por una distancia incremental d r, r d\(\phi\) y dz en cada una de las tres coordenadas direcciones. El volumen diferencial y las áreas superficiales ahora dependen de la coordenada r como se resume en la Tabla 1-1.
| CARTESIANO | CILÍNDRICO | ESFÉRICO |
|---|---|---|
| \(\textbf{dl} = dx \: \textbf{i}_{x} + dy \: \textbf{i}_{y} dz \: \textbf{i}_{z}\) | \(\textbf{dl} = d \textrm{r} \: \textbf{i}_{\textrm{r}} + \textrm{r} \: d \phi \: \textbf{i}_{\phi} + dz \: \textbf{i}_{z}\) | \( \textbf{dl} = dr \: \textbf{i}_{r} + r d \theta \: \textbf{i}_{\theta} + r \sin \theta d \phi \: \textbf{i}_{\phi}\) |
| \(dS_{x} = dy dz\) | \(dS_{r} = \textrm{r} d \phi d z\) | \(dS_{r} = r^{2} \sin \theta d \theta d \phi\) |
| \(dS_{y} = dx \: dz\) | \(dS_{\phi} = d \textrm{r} \: d z\) | \(dS_{\theta} = r \sin \theta dr \: d \phi\) |
| \(dS_{z} = dx \: dy\) | \(dS_{z} = \textrm{r} \: d \textrm{r} \: d \phi\) | \(dS_{\phi} = r \: dr \: d \theta\) |
| \(dV = dx \: dy \: dz\) | \(dV = \textrm{r} d \textrm{r} \: d \phi \: dz\) | \(dV = r^{2} \sin \theta \: dr \: d \theta \: d \phi\) |
Coordenadas esféricas
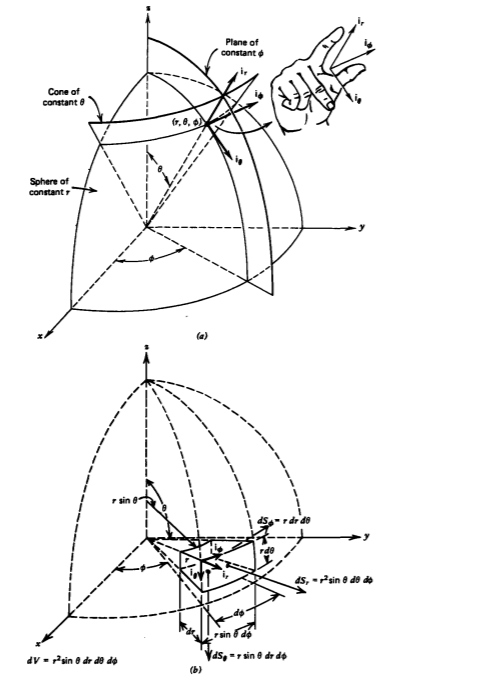
Un sistema de coordenadas esféricas es útil cuando hay un punto de simetría que se toma como origen. En la Figura 1-3 a vemos que la coordenada esférica (r\(\theta\),,\(\phi\)) se obtiene por la intersección de una esfera con radio r, un plano a constante.
ángulo\(\phi\) desde el eje x como se define para el sistema de coordenadas cilíndrico, y un cono en ángulo\(\theta\) desde el eje z. Los vectores unitarios i r \(\theta\), i e i\)\ phi\) son perpendiculares a cada una de estas superficies y cambian de dirección de punto a punto. El triplete (r,\(\theta\),\(\phi\)) debe formar un conjunto diestro de coordenadas. El elemento de volumen esférico de tamaño diferencial formado al considerar desplazamientos incrementales dr, rd\(\theta\), r sin\(\theta\) d\(\phi\)
CILINDRICO CARTESIANO\(\phi\) ESFERICO x = r cos =\(r \: \sin \theta \: \cos \phi\) y\(\phi\) = r sin =\(r \: sin \theta \: \sin \phi\) z = z = r cos\(\theta\) i x = cos\(\phi\) i r - sin\(\phi\) i \(\phi\)=\(\sin \theta \cos \phi \textbf{i}_{r} + \cos \theta \: \cos \phi \textbf{i}_{\theta} = \sin \phi \textbf{i}_{\phi}\) i y = sin\(\phi\) i r + cos\(\phi\) i \(\phi\)=\(\sin \theta \sin \phi \textbf{i}_{r} + \cos \theta \sin \phi \: \textbf{i}_{\theta} + \cos \phi \: \textbf{i}_{\phi}\) i z = i z = Esféricas cartesianas cilíndricas r\(\sqrt{x^{2} + y^{2}}\)\(r \: \sin \theta\)\(\phi\) =\(\tan^{-1} \frac{y}{x}\) = =\(\phi\) z = z = z =\(r \: \cos \theta\) i r\(\cos \: \phi \textbf{i}_{x} + \sin \: \phi \textbf{i}_{y}\) =\(\sin \: \theta \textbf{i}_{r} + \cos \: \theta \textbf{i}_{\theta}\) i \(\phi\)=\(\textbf{i}_{\phi}\) i z = i x =\(\cos \: \theta \textbf{i}_{r} = \sin \: \theta \textbf{i}_{\theta}\)
| ESFÉRICO | CARTESIANO | CILÍNDRICO |
|---|---|---|
| r = | \(\sqrt{x^{2} + y^{2} + z^{2}}\)= | \(\sqrt{r^{2} + z^{2}}\) |
| \(\theta\)= | \(\cos^{-1} \frac{z}{\sqrt{x^{2} + y^{2} + z^{2}}}\)= | \(\cos^{-1} \frac{z}{\sqrt{r^{2} + z^{2}}}\) |
| \(\phi\)= | \(\cot^{-1} \frac{x}{y}\)= | \(\phi\) |
| i r = | \(\sin \: \theta \: \cos \phi \textbf{i}_{x} + \sin \: \theta \: \sin \: \phi \textbf{i}_{y} + \cos \: \theta \textbf{i}_{x}\)= | \(\sin \: \theta \textbf{i}_{r} + \cos \: \theta \textbf{i}_{x}\) |
| i \(\theta\)= | \(\cos \: \theta \: \cos \phi \textbf{i}_{x} + \cos \: \theta \: \sin \: \phi \textbf{i}_{y} = \sin \: \theta \textbf{i}_{x}\)= | \(\sin \: \theta \textbf{i}_{r} + \cos \theta \textbf{i}_{x}\) |
| i \(\phi\)= | i \(\phi\) |
* Tenga en cuenta que a lo largo de este texto se usa una r romana minúsculas para la coordenada radial cilíndrica mientras que una r en cursiva se usa para la coordenada radial esférica.
de la coordenada (r,\(\theta\),\(\phi\)) ahora depende del ángulo\(\theta\) y la posición radial r como se muestra en la Figura 1-3b y se resume en la Tabla 1-1. El Cuadro 1-2 resume las relaciones geométricas entre coordenadas y vectores unitarios para los tres sistemas de coordenadas considerados. Mediante esta tabla, es posible convertir posiciones de coordenadas y vectores unitarios de un sistema a otro.