
13.1: Ecuación de Langevin
- Page ID
- 69614
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\(\newcommand{\longvect}{\overrightarrow}\)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
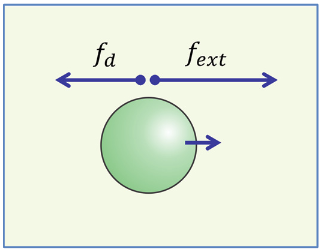
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)Considera las fuerzas que actúan sobre una partícula a medida que la arrastramos a través de un fluido. Tiramos de la partícula con una fuerza externa\(f_{ext}\), a la que se opone una fuerza de arrastre del fluido,\(f_d\). El arrastre o amortiguación actúa como resistencia al movimiento de la partícula, lo que resulta de intentar sacar el fluido del camino.
\[f_d = -\zeta v \qquad \qquad \quad \zeta \mathrm{(kg/s)} \]
Una fuerza de arrastre requiere movimiento, por lo que es proporcional a la velocidad de la partícula\(v=dx/dt=x\) y el coeficiente de fricción\(\zeta\) es la constante de proporcionalidad que describe la magnitud de la amortiguación. La segunda ley de Newton relaciona la aceleración de esta partícula es con la suma de estas fuerzas:
\[ ma = f_d+f_{ext} \nonumber \]

Ahora microscópicamente, también reconocemos que existen fuerzas aleatorias dependientes del tiempo que las moléculas del fluido ejercen sobre una molécula (\(f_r\)). Para que los detalles moleculares específicos de las colisiones soluto-disolvente puedan promediarse, es útil pensar en un soluto a nanoescala en agua (por ejemplo, macromoléculas biológicas) con dimensiones lo suficientemente grandes como para que su posición sea influenciada simultáneamente por muchas moléculas solventes, pero también es lo suficientemente ligera como para las interacciones constantes con el disolvente dejan una fuerza desequilibrada que actúa sobre el soluto en cualquier momento en el tiempo:
\[\overline{f}_r(t)=-\sum_i \overline{f}_i(t) \nonumber\]
Entonces la segunda ley de Newton es
\[ ma = f_d + f_{ext} +f_r(t) \nonumber \]
La fuerza de arrastre está presente independientemente de que esté presente una fuerza externa, por lo que en ausencia de fuerzas externas (\(f_{ext}=0\)) la ecuación de movimiento que gobierna las fluctuaciones espontáneas de este soluto se determina a partir de las fuerzas debidas al arrastre y las fluctuaciones aleatorias:
\[ma = f_d + f_r(t) \label{13.1.1}\]
\[m\ddot{x} + \zeta \dot{x} - f_r(t) = 0 \label{13.1.2}\]
Esta ecuación de movimiento es la ecuación de Langevin. Una ecuación de movimiento como esta que incluye una fuerza aleatoria dependiente del tiempo se conoce como “estocástica”.
Insertar un proceso aleatorio en una ecuación determinista significa que necesitamos usar un enfoque estadístico para resolver esta ecuación. Estaremos buscando describir la posición promedio y media cuadrática de la partícula. Primero, ¿qué podemos decir de la fuerza aleatoria? Aunque puede haber desequilibrios momentáneos, en promedio las perturbaciones del disolvente en una partícula más grande promediarán a cero en equilibrio:
\[ \langle f_r(t) \rangle = 0 \]
La ecuación\ ref {13.1.1} parece implicar que la fuerza de arrastre y la fuerza aleatoria son independientes, pero de hecho se originan en las mismas fuerzas moleculares. Si la molécula de interés es una proteína que experimenta las fluctuaciones de muchas moléculas solventes que se mueven rápidamente, entonces las fuerzas promediadas debido a fluctuaciones aleatorias y las fuerzas de arrastre están relacionadas. El teorema de fluctuación-disipación es la relación general que relaciona la fricción con la función de correlación para la fuerza aleatoria. En el límite markoviano esto es
\[ \langle f_r(t) f_r(t') \rangle = 2\zeta k_BT \delta (t-t')\]
o\[ \zeta = \dfrac{\langle f_r^2 \rangle }{2k_BT} \nonumber \]
Markovic indica que no existe correlación entre la fuerza aleatoria para |t‒t′| > 0. De manera más general, podemos recuperar el coeficiente de fricción de la integral sobre la función de correlación para la fuerza aleatoria
\[ \zeta = \dfrac{1}{2k_BT} \int^{+\infty}_{-\infty} dt \langle f_R(0)f_R(t) \rangle \nonumber \]
Para describir la evolución en el tiempo de la posición de nuestra molécula proteica, nos gustaría obtener una expresión para el desplazamiento cuadrático medio. La posición de la molécula se puede describir integrando sobre su velocidad dependiente del tiempo:\(x(t)=\int^t_0 dt' \dot{x}(t')\), así podemos expresar el desplazamiento cuadrático medio en términos de la función de autocorrelación de velocidad
\[\langle x^2(t) \rangle = \int^t_0 dt' \int^t_0 dt'' \langle \dot{x}(t') \dot{x}(t'') \rangle \]
Nuestro enfoque para la obtención de ⟩ se inicia multiplicando la eq. (13.1.2) por x y luego promediando el conjunto.
\[ m \langle x \dfrac{d}{dt} \dot{x} \rangle + \zeta \langle x \dot{x} \rangle - \langle xf_r(t) \rangle =0 \]
De la eq. (13.1.3), el último término es cero, y de la regla de la cadena sabemos
\[ \dfrac{d}{dt} (x\dot{x}) = x\dfrac{d}{dt} \dot{x} + \dfrac{dx}{dt}\dot{x} \]
Por lo tanto, podemos escribir eq. (13.1.6) como
\[ m \left( \dfrac{d}{dt} \langle x\dot{x} \rangle - \langle \dot{x} \dot{x} \rangle \right) + \zeta \langle x \dot{x} \rangle = 0 \]
Además, el teorema de equipartición establece que para cada grado de libertad traslacional la energía cinética se divide como
\[ \dfrac{1}{2} m \langle \dot{x}^2 \rangle = \dfrac{k_BT}{2} \]
Entonces,\[m \dfrac{d}{dt} \langle x\dot{x} \rangle + \zeta \langle x \dot{x} \rangle = k_BT \]
Aquí estamos describiendo el movimiento en 1D, pero cuando se incluyen fluctuaciones y desplazamiento para el movimiento 3D, entonces cambiamos x → r y k B T→3k B T. Integrando la eq. (13.1.10) dos veces con respecto al tiempo, y usando la condición inicial x (0) = 0, obtenemos
\[ \langle x^2 \rangle = \dfrac{2k_BT}{\zeta } \left\{ t +\dfrac{m}{\zeta } \left[ \exp \left( -\dfrac{\zeta }{m}t \right) -1 \right] \right\} \]
en 3D:
\[\langle r^2 \rangle = \dfrac{6k_BT}{\zeta } \left\{ t +\dfrac{m}{\zeta } \left[ \exp \left( -\dfrac{\zeta }{m}t \right) -1 \right] \right\} \nonumber \]
Para investigar la eq. (13.1.11), consideremos dos casos limitantes. Vemos que m/tiene unidades de tiempo, y así definimos el tiempo de relajación
\[ \tau_C = m/ \zeta \]
e investigar la escala de tiempo corta y larga comparada con τ C:
1) Porque\(t \ll \tau_C \), podemos expandir lo exponencial en eq. (11) y retener los tres primeros términos, lo que lleva a
\[ \langle x^2 \rangle \approx \dfrac{k_BT}{m}t^2 = \langle v^2 \rangle t^2 \qquad \qquad \quad \text{(short time: inertial)}\]
2) Para\(t \gg \tau_C\), la ecuación (11) está dominada por el término principal:
\[ \langle x^2 \rangle = \dfrac{2k_BT}{\zeta} t \qquad \qquad \quad \text{(long time: diffusive)} \]
En el límite difusivo el comportamiento de la molécula está gobernado enteramente por el fluido, y su masa no importa. El límite difusivo en una ecuación estocástica de movimiento es equivalente a establecer m→0.
Vemos que τ C es una escala de tiempo que separa el movimiento en los límites inercial y difusivo. Es un tiempo de correlación para la aleatorización de la velocidad de la partícula debido a las fluctuaciones aleatorias del ambiente.

Por muy poca fricción o poco tiempo, la partícula se mueve con movimiento determinista tradicional x rms = v rms t, donde el desplazamiento cuadrático medio raíz x rms = bernarx 2 ⟩ 1/2 y v rms proviene de la cinética traslacional promedio energía de la partícula. Para tiempos de alta fricción o largos, vemos un comportamiento difusivo con x rms ~t 1/2. Además, al comparar la ecuación (13.1.14) con nuestro resultado anterior de continuum, x 2 ⟩ = 2Dt, vemos que la constante de difusión puede estar relacionada con el coeficiente de fricción por
\[ D= \dfrac{k_BT}{\zeta} \quad \text{(in 1D)} \]
Esta es la fórmula de Einstein. Para problemas 3D, reemplazamos k B T por 3k B T en las expresiones anteriores y encontramos\( D_{3D}=3k_BT /\zeta\).
\[ \tau_C = \dfrac{m}{\zeta} = \dfrac{mD}{k_BT} \quad \text{(in 1D)} \nonumber \]
¿Cuánto tiempo se tarda en acercarse al régimen difusivo? Muy rápido. Considerar una proteína de 100 kDa con R = 3 nm en agua a T = 300 K, encontramos un tiempo de correlación característico para velocidades de aleatorización de\(\tau_C=3\mathrm{x}10^{-12}\) s, que corresponde a una distancia de aproximadamente 10 —2 nm antes del inicio del comportamiento difusivo.
Podemos encontrar otras relaciones. Observando la relación de x 2 ⟩ con la función de autocorrelación de velocidad en eq. (13.1.5), encontramos que la velocidad de la partícula es descrita por
\[ \langle v_x(0)v_x(t) \rangle = \langle v_x^2\rangle e^{-\zeta t /m}= \langle v^2_x \rangle e^{-t/\tau_C} \qquad \qquad \qquad v_x = \dot{x} \nonumber \]
que se pueden integrar a lo largo del tiempo para obtener la constante de difusión.
\[ \int^{\infty}_0 \langle v_x(0)v_x(t) \rangle dt = \dfrac{k_BT}{\zeta} = D \]
Esta expresión es la relación Verde-Kubo. Esta es una forma práctica de analizar trayectorias moleculares en simulaciones o usar experimentos de seguimiento de partículas para cuantificar constantes de difusión o coeficientes de fricción.