
3.5: Oscilaciones
- Page ID
- 129722

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\(\newcommand{\longvect}{\overrightarrow}\)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)Revisemos el ejemplo del resorte estirado de la sección anterior. Sabemos que su energía es una forma de energía eléctrica de átomos que interactúan, lo cual es agradable conceptualmente pero no nos ayuda a resolver problemas, ya que no sabemos cómo la energía\(U\),, depende de la longitud del resorte. Todo lo que sabemos es que hay un equilibrio (figura a /1), que es un mínimo local de la función\(U\). Un problema sumamente importante que surge en este sentido es cómo calcular el movimiento oscilatorio alrededor de un equilibrio, como en un /4-13. Incluso si hiciéramos experimentos especiales para averiguar cómo funcionaba la energía de la primavera, podría parecer que tendríamos que pasar por tanto trabajo para lidiar con cualquier otro tipo de oscilación, como un retoño balanceándose de un lado a otro en la brisa.

a/El resorte tiene una longitud mínima de energía, 1, y se requiere energía para comprimirlo o estirarlo, 2 y 3. Una masa unida al resorte oscilará alrededor del equilibrio, 4-13.
Sorprendentemente, es posible analizar este tipo de oscilaciones de una manera muy general y elegante, siempre y cuando el análisis se limite a pequeñas oscilaciones. Hablaremos de la misa en primavera por concreción, pero no habrá nada en la discusión en absoluto que esté restringido a ese sistema físico en particular. Primero, escojamos un sistema de coordenadas en el que\(x=0\) corresponda a la posición de la masa donde el resorte está en equilibrio, y dado que las energías de interacción como solo\(U\) están bien definidas hasta una constante aditiva, simplemente la definiremos como cero en equilibrio:
Ya que\(x=0\) es un equilibrio,\(U(x)\) debe tener ahí un mínimo local, y una función diferenciable (que suponemos que\(U\) es) tiene una derivada cero a un mínimo local:

b/Tres funciones con la misma curvatura a\(x\) =0.
Todavía hay infinitamente muchas funciones que podrían satisfacer estos criterios, entre ellas las tres que se muestran en la figura b, que son\(x^2/2\),\(x^2/2(1+x^2)\), y\((e^{3x}+e^{-3x}-2)/18\). Tenga en cuenta, sin embargo, cómo las tres funciones son prácticamente idénticas cerca del mínimo. Eso es porque todos tienen la misma curvatura. Más específicamente, cada función tiene su segunda derivada igual a 1 at\(x=0\), y la segunda derivada es una medida de curvatura. Escribimos\(k\) para la segunda derivada de la energía en un punto de equilibrio,
Físicamente,\(k\) es una medida de rigidez. Por ejemplo, los resortes de servicio pesado en los amortiguadores de un automóvil tendrían un alto valor de\(k\). A menudo se le conoce como la constante de resorte, pero aquí solo estamos usando un resorte como ejemplo. Como se muestra en la figura b, dos funciones cualesquiera que tengan\(U(0)=0\)\(d{}U/d{}x=0\)\(d{}^2U/d{}x^2=k\), y, con el mismo valor de\(k\), son prácticamente indistinguibles para valores pequeños de\(x\), así que si queremos analizar pequeñas oscilaciones, ni siquiera importa qué función asumimos. Por simplicidad, solo usaremos\(U(x)=(1/2)kx^2\) a partir de ahora.
Ahora estamos listos para analizar el sistema de masa-en-resorte, teniendo en cuenta que en realidad es solo un ejemplo representativo de toda una clase de sistemas oscilantes similares. Esperamos que el movimiento se repita una y otra vez, y como no vamos a incluir el calentamiento por fricción en nuestro modelo, esa repetición debería continuar para siempre sin desaparecer. Lo más interesante que hay que saber sobre la moción sería el periodo,\(T\), que es la cantidad de tiempo que se requiere para un ciclo completo del movimiento. Podríamos esperar que el periodo dependa de la constante de resorte\(k\),, la masa\(m\), y la amplitud,\(A\), definida en la figura c. 11

c/La amplitud normalmente se definiría como la distancia desde el equilibrio hasta un extremo del movimiento, es decir, la mitad del recorrido total.
En ejemplos como el brachistochrone y la misión Apolo 11, generalmente fue necesario utilizar técnicas numéricas para determinar la cantidad de tiempo requerido para un cierto movimiento. Una vez más, vamos a desempolvar la función time3 de la página 93 y modificarla para nuestros fines. Para mayor flexibilidad, definiremos la función\(U(x)\) como una función Python separada. Realmente queremos calcular el tiempo requerido para que la masa vuelva a su punto de partida, pero eso sería incómodo de configurar, ya que nuestra función funciona dividiendo la distancia a recorrer en pequeños segmentos. Por simetría, el tiempo requerido para pasar de un extremo a otro es igual al tiempo requerido para volver al inicio, así que simplemente calcularemos el tiempo para medio ciclo y luego lo doblaremos cuando devolvamos el resultado al final de la función. La prueba en las líneas 16-19 es necesaria porque de lo contrario al final del movimiento podemos terminar tratando de tomar la raíz cuadrada de un número negativo debido a errores de redondeo.
import math
def u(k,x):
return .5*k*x**2
def osc(m,k,a,n):
x=a
v=0
dx = -2.*a/n
t=0
e = u(k,x)+.5*m*v**2
for i in range(n):
x_old = x
v_old = v
x = x+dx
kinetic = e-u(k,x)
if kinetic<0. :
v=0.
print "warning, K=",kinetic,"<0"
else :
v = -math.sqrt(2.*kinetic/m)
v_avg = (v+v_old)/2.
dt=dx/v_avg
t=t+dt
return 2.*t
>>> print(osc(1.,1.,1.,100000)) warning, K= -1.43707268307e-12 <0 6.2831854132667919
Lo primero que hay que notar es que con este conjunto particular de entradas (\(m\)=1 kg,\(k=1\ \text{J}/\text{m}^2\), y\(A=1\ \text{m}\)), el programa ha hecho un excelente trabajo de computación\(2\pi=6.2831853...\). Esta es la Madre Naturaleza dándonos un fuerte indicio de que el problema tiene una solución algebraica, no solo numérica. Lo siguiente interesante sucede cuando cambiamos la amplitud de 1 m a 2 m:
>>> print(osc(1.,1.,2.,100000)) warning, K= -5.7482907323e-12 <0 6.2831854132667919
A pesar de que la masa tuvo que recorrer el doble de distancia en cada dirección, ¡el periodo es el mismo que dentro de la precisión numérica del cálculo!
Con estos indicios, parece que deberíamos empezar a buscar una solución algebraica. Para orientación, aquí hay una gráfica de\(x\) como una función de\(t\), según lo calculado por la función osc con n = 10.

Esto parece una función coseno, así que veamos si a\(x=A\cos{}(\omega{}t+\delta)\) es una solución a la ecuación de conservación de energía —no es raro intentar “realizar ingeniería inversa” los resultados crípticos de un cálculo numérico como este. El símbolo\(\omega=2\pi/T\) (omega griego), llamado frecuencia angular, es un símbolo estándar para el número de radianes por segundo de oscilación. Excepto por el factor de\(2\pi\), es idéntica a la frecuencia ordinaria\(f=1/T\), que tiene unidades de\(\text{s}^{-1}\) o Hz (Hertz). El ángulo de fase\(\delta\) es para permitir la posibilidad que\(t=0\) no coincida con el inicio del movimiento. La energía es
Según la conservación de la energía, esto tiene que ser una constante. Usando la identidad\(\sin^2+\cos^2=1\), podemos ver que será una constante si la tenemos\(m\omega^2=k\), o\(\omega=\sqrt{k/m}\), es decir,\(T=2\pi\sqrt{m/k}\). Tenga en cuenta que el periodo es independiente de la amplitud.
| Ejemplo 23: Un resorte y una palanca |
|---|
|
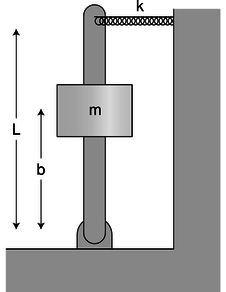
d/Ejemplo 23. La varilla pivota en la bisagra en la parte inferior.
\(\triangleright\)¿Cuál es el periodo de pequeñas oscilaciones del sistema que se muestra en la figura? Descuidar la masa de la palanca y el resorte. Supongamos que el resorte es tan rígido que la gravedad no es un efecto importante. El resorte se relaje cuando la palanca está vertical. \(\triangleright\)Esto es un poco complicado, porque la constante de primavera\(k\), aunque es relevante, no es la\(k\) que deberíamos estar poniendo en la ecuación\(T=2\pi\sqrt{m/k}\). El\(k\) que entra ahí tiene que ser la segunda derivada de\(U\) con respecto a la posición,\(x\), de la masa que se mueve. La energía\(U\) almacenada en el resorte depende de qué tan lejos esté la punta de la palanca del centro. Esta distancia es igual\((L/b)x\), por lo que la energía en la primavera es \[\begin{align*} U &= \frac{1}{2}k\left(\frac{L}{b}x\right)^2 \\ &= \frac{kL^2}{2b^2}x^2 , \\ \end{align*}\] y el que\(k\) tenemos que poner\(T=2\pi\sqrt{m/k}\) es \[\begin{equation*} \frac{d^2 U}{dx^2} = \frac{kL^2}{b^2} . \\ \end{equation*}\] El resultado es \[\begin{align*} T &= 2\pi\sqrt{\frac{mb^2}{kL^2}} \\ &= \frac{2\pi b}{L}\sqrt{\frac{m}{k}} \\ \end{align*}\] El apalancamiento de la palanca hace que sea como si el resorte fuera más fuerte, y disminuye el periodo de las oscilaciones por un factor de\(b/L\). |
| Ejemplo 24: Agua en un tubo en forma de U |
|---|
|
e/Agua en un tubo en forma de U.
\(\triangleright\)¿Cuál es el periodo de oscilación del agua en la figura e? \(\triangleright\)En el ejemplo 13 de la p. 89, encontramos\(U( y)=\rho gAy^2\), así que la “constante de resorte”, que realmente no es una constante de resorte aquí en absoluto, es \[\begin{align*} k &= \frac{\text{d}^2 U}{\text{d} y^2} \\ &= 2\rho gA . \end{align*}\] Este es un ejemplo interesante, porque se\(k\) puede calcular sin ninguna aproximación, pero la energía cinética requiere una aproximación, porque desconocemos los detalles del patrón de flujo del agua. Podría ser muy complicado. Habrá una tendencia a que el agua cerca de las paredes fluya más lentamente debido a la fricción, y también puede haber un movimiento turbulento y turbulento. Sin embargo, si hacemos la aproximación de que toda el agua se mueve con la misma velocidad que la superficie\(\text{d} y/\text{d} t\), entonces se aplica el análisis de masa sobre un resorte. Dejando\(L\) ser la longitud total de la parte llena del tubo, la masa es\(\rho LA\), y tenemos \[\begin{align*} T &= 2\pi\sqrt{ m/ k} \\ &= 2\pi\sqrt{\frac{\rho LA}{2\rho gA}} \\ &= 2\pi\sqrt{\frac{ L}{2 g}} . \end{align*}\] |
