
4.3: Resonancia
- Page ID
- 129976

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\(\newcommand{\longvect}{\overrightarrow}\)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)La resonancia es un fenómeno en el que un oscilador responde con mayor fuerza a una fuerza impulsora que coincide con su propia frecuencia natural de vibración. Por ejemplo, supongamos que un niño está en un columpio de patio de recreo con una frecuencia natural de 1 Hz. Es decir, si sacas al niño del equilibrio, la sueltas, y luego dejas de hacer cualquier cosa por un tiempo, oscilará a 1 Hz. Si no hubiera fricción, como suponíamos en la sección 2.5, entonces la suma de su energía gravitacional y cinética permanecería constante, y la amplitud sería exactamente la misma de una oscilación a la siguiente. No obstante, la fricción va a convertir estas formas de energía en calor, por lo que sus oscilaciones gradualmente se van extinguiendo. Para evitar que esto suceda, podrías darle un empujón una vez por ciclo, es decir, la frecuencia de tus empujes sería de 1 Hz, que es la misma que la frecuencia natural del swing. Mientras te mantengas en ritmo, el swing responde bastante bien. Si comienzas el swing desde el reposo, y luego das empujes a 1 Hz, la amplitud del swing se acumula rápidamente, como en la figura a, hasta que después de un tiempo alcanza un estado estacionario en el que la fricción elimina la misma cantidad de energía que pones en el transcurso de un ciclo.
autocomprobación:
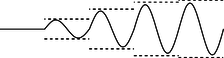
Figura a: Un\(t\) gráfico\(x\) -versus- para un swing empujado en resonancia.
En la figura a, compara la amplitud del ciclo inmediatamente siguiente al primer impulso con la amplitud posterior al segundo. Compara también las energías. (respuesta en la parte posterior de la versión PDF del libro)
¿Qué pasará si intentas empujar a 2 Hz? Tu primer empujón pone algo de ímpetu\(p\), pero tu segundo empuje ocurre después de solo medio ciclo, cuando el swing viene de vuelta a ti, ¡con ímpetu\(-p\)! La transferencia de impulso desde el segundo empuje es exactamente suficiente para detener el swing. El resultado es un movimiento muy débil, y no muy sinusoidal, b.

Figura b: Una oscilación empujada al doble de su frecuencia resonante.
Haciendo las matemáticas fáciles
Este es un ejemplo de resonancia simple y físicamente transparente: el swing responde con mayor fuerza si coincide con su ritmo natural. Sin embargo, tiene algunas características que son matemáticamente feas y posiblemente poco realistas. Los empujones rápidos y duros se conocen como fuerzas impulsoras, c, y conducen a una\(x\)\(t\) gráfica que tiene torceduras no diferenciables.

Figura c:\(t\) Gráfica\(F\) -versus- para una fuerza impulsora impulsiva.
Fuerzas impulsivas como esta no sólo se comportan mal matemáticamente, suelen ser indeseables en términos prácticos. En un motor de automóvil, por ejemplo, los ingenieros trabajan muy duro para que la fuerza sobre los pistones cambie suavemente, para evitar vibraciones excesivas. A lo largo del resto de esta sección, asumiremos una fuerza impulsora que es sinusoidal, d, es decir, una cuya\(F\)\(t\) -gráfica es una función sinusoidal o una función que difiere de una onda sinusoidal en fase, como un coseno. La fuerza es positiva para la mitad de cada ciclo y negativa para la otra mitad, es decir, hay tanto empujar como tirar. Las funciones sinusoidales tienen muchas características matemáticas agradables (podemos diferenciarlas e integrarlas, y la suma de funciones sinusoidales que tienen la misma frecuencia es una función sinusoidal), y también se utilizan en muchas situaciones prácticas. Por ejemplo, mi zapper de puerta de garaje envía una onda de radio sinusoidal, y el receptor está sintonizado a resonancia con él.
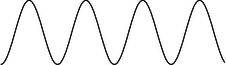
Figura d: Una fuerza impulsora sinusoidal.
Un segundo tema matemático que pasé por alto en el ejemplo del swing fue cómo se comporta la fricción. En la sección 3.2.4, sobre las fuerzas entre sólidos, la ecuación empírica para la fricción cinética fue independiente de la velocidad. La fricción fluida, por otro lado, depende de la velocidad. Para un niño en un columpio, la fricción fluida es la forma más importante de fricción, y es aproximadamente proporcional a\(v^2\). En otras situaciones más, por ejemplo, con un gas de baja densidad o fricción entre superficies sólidas que han sido lubricadas con un fluido como el petróleo, podemos encontrar que la fuerza de fricción tiene alguna otra dependencia de la velocidad, quizás siendo proporcional a\(v\), o teniendo alguna otra velocidad complicada dependencia que ni siquiera se puede expresar con una ecuación simple. Sería extremadamente complicado tener que tratar todas estas diferentes posibilidades en completa generalidad, así que para el resto de esta sección, asumiremos fricción proporcional a la velocidad
\[\begin{equation*} F = -bv , \end{equation*}\]
simplemente porque las ecuaciones resultantes resultan ser las más fáciles de resolver. Incluso cuando la fricción no se comporta exactamente de esta manera, muchos de nuestros resultados pueden ser al menos cualitativamente correctos.
3.3.1 Amortiguado, libre movimiento
Tratamiento numérico
Un oscilador que tiene fricción se conoce como amortiguado. Usemos técnicas numéricas para encontrar el movimiento de un oscilador amortiguado que se libera lejos del equilibrio, pero que después de eso no experimenta fuerza motriz. Podemos esperar que el movimiento consista en oscilaciones que gradualmente se van extinguiendo.

Figura e: Onda sinusoidal amortiguada, de la forma\(x = Ae^{- ct}\text{sin} (\omega_{f} t+\delta)\).
En la sección 2.5, simulamos el caso sin amortiguar usando nuestra función Python comprobada y verdadera basada en la conservación de energía. Ahora, sin embargo, ese enfoque se vuelve un poco incómodo, porque implica dividir el camino a recorrer en\(n\) pequeños segmentos, pero ante la presencia de amortiguación, cada swing es un poco más corto que el último, y no sabemos de antemano exactamente qué tan lejos llegará la oscilación antes de girar alrededor. Una técnica más fácil aquí es usar la fuerza en lugar de la energía. La segunda ley de Newton\(a=F/m\),\(a=(-kx-bv)/m\), da, donde hemos hecho uso del resultado del ejemplo 40 para la fuerza ejercida por la primavera. Esto se vuelve un poco más bonito si lo reescribimos en la forma
\[\begin{equation*} ma+bv+kx = 0 , \end{equation*}\]
que da tratamiento simétrico a tres términos implicando\(x\) y sus derivados primero y segundo,\(v\) y\(a\). Ahora en lugar de calcular el tiempo\(\Delta{}t=\Delta{}x/v\) requerido para movernos una distancia predeterminada\(\Delta{}x\), recogemos\(\Delta{}t\) y determinamos la distancia recorrida en ese tiempo,\(\Delta{}x=v\Delta{}t\). Además, ya no podemos actualizar en\(v\) base a la conservación de energía, ya que no tenemos ninguna manera fácil de hacer un seguimiento de cuánta energía mecánica se ha cambiado en energía térmica. En cambio, recalculamos la velocidad usando\(\Delta{}v=a\Delta{}t\).
import math
k=39.4784 # chosen to give a period of 1 second
m=1.
b=0.211 # chosen to make the results simple
x=1.
v=0.
t=0.
dt=.01
n=1000
for j in range(n):
x=x+v*dt
a=(-k*x-b*v)/m
if (v>0) and (v+a*dt<0) :
print("turnaround at t=",t,", x=",x)
v=v+a*dt
t=t+dt
turnaround at t= 0.99 , x= 0.899919262445 turnaround at t= 1.99 , x= 0.809844934046 turnaround at t= 2.99 , x= 0.728777519477 turnaround at t= 3.99 , x= 0.655817260033 turnaround at t= 4.99 , x= 0.590154191135 turnaround at t= 5.99 , x= 0.531059189965 turnaround at t= 6.99 , x= 0.477875914756 turnaround at t= 7.99 , x= 0.430013546991 turnaround at t= 8.99 , x= 0.386940256644 turnaround at t= 9.99 , x= 0.348177318484
La constante de resorte,\(k=4\pi{}=39.4784\) N/m, está diseñada de manera que si la ecuación sin amortiguar\(f=(1/2\pi)\sqrt{k/m}\) seguía siendo verdadera, la frecuencia sería de 1 Hz. Comenzamos por señalar que la adición de una pequeña cantidad de amortiguación no parece haber cambiado en absoluto el período, o al menos no dentro de la precisión del cálculo. 10 Puedes comprobar por ti mismo, sin embargo, que un gran valor de\(b\), digamos 5\(\text{N}\!\cdot\!\text{s}/\text{m}\), sí cambia el periodo significativamente.
Liberamos la masa de\(x=1\ \text{m}\), y después de un ciclo, solo vuelve a aproximadamente\(x=0.9\ \text{m}\). \(b=0.211\ \text{N}\!\cdot\!\text{s}/\text{m}\)Elegí jugueteando hasta que obtuve este resultado, ya que una disminución de exactamente el 10% es fácil de discutir. Observe cómo es aproximadamente la amplitud después de dos ciclos\(0.81\ \text{m}\), es decir,\(1\ \text{m}\) veces\(0.9^2\): la amplitud ha vuelto a caer exactamente en un 10%. Este patrón continúa mientras se ejecute la simulación, por ejemplo, para los dos últimos ciclos, tenemos 0.34818/0.38694=0.89982, o casi exactamente 0.9 nuevamente. Podría haber parecido caprichoso cuando elegí usar la ecuación poco realista\(F=-bv\), pero esta es la rentabilidad. Sólo con\(-bv\) la fricción obtenemos este tipo de decaimiento exponencial matemáticamente simple.
Debido a que la decadencia es exponencial, nunca muere por completo; esto es diferente al comportamiento que hubiéramos tenido con la fricción de Coulomb, que hace que los objetos se mueran completamente hasta detenerse en algún momento. Con fricción que actúa como\(F=-bv\),\(v\) se hace más pequeña a medida que las oscilaciones se hacen más pequeñas. La fuerza cada vez más pequeña hace que se extinguen a una velocidad cada vez más lenta.