
02. Dibujo de diagramas de movimiento en 1D
- Page ID
- 132656

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\){{Template.dropdown {path:” /Spiral_physics/i_-_mechanics/model_one%3a_1d_constant-force_partículas_model/03. _Cinemática "}}}
Dibujo de diagramas de movimiento (cualitativos)
Las palabras utilizadas por los físicos para describir el movimiento de los objetos se definen anteriormente. Sin embargo, aprender a usar estos términos correctamente es más difícil que simplemente memorizar definiciones. Una herramienta extremadamente útil para cerrar la brecha entre una descripción normal y conversacional de una situación y una descripción de los físicos es el diagrama de movimiento. Un diagrama de movimiento es el primer paso para traducir una descripción verbal de un fenómeno en una descripción física.
Comience con la siguiente descripción verbal de una situación física:
El conductor de un automóvil que viaja a 15 m/s, al notar un semáforo rojo 30 m adelante, aplica los frenos de su auto hasta que se detiene justo antes de la intersección.
Determinar la posición a partir de un diagrama de movimiento
Un diagrama de movimiento se puede considerar como una fotografía de exposición múltiple de la situación física, con la imagen del objeto expuesta sobre la película a intervalos de tiempo iguales. (Es posible que hayas visto fotografías de este tipo tomadas con una luz estroboscópica). Por ejemplo, una fotografía de exposición múltiple de la situación descrita anteriormente se vería así:

Tenga en cuenta que las imágenes del automóvil se están acercando cerca del final de su movimiento porque el automóvil está viajando una distancia menor entre las exposiciones igualadas en el tiempo.
En general, al dibujar diagramas de movimiento es mejor representar el objeto simplemente como un punto, a menos que la forma real del objeto transmita alguna información interesante. Así, un mejor diagrama de movimiento sería:

Dado que el propósito del diagrama de movimiento es ayudarnos a describir el movimiento del automóvil, es necesario un sistema de coordenadas. Recuerda, para definir un sistema de coordenadas debes elegir un cero, definir una dirección positiva y seleccionar una escala. Siempre usaremos medidores como nuestra escala de posición en este curso, por lo que solo debes seleccionar un cero y una dirección positiva. Recuerda, no hay una respuesta correcta. Cualquier sistema de coordenadas es tan correcto como cualquier otro.
La elección a continuación indica que la posición inicial del automóvil es el origen, y las posiciones a la derecha del mismo son positivas.

Ahora podemos describir la posición del automóvil. El auto arranca en la posición cero y luego tiene posiciones positivas, crecientes a lo largo del resto de su movimiento.
Determinar la velocidad a partir de un diagrama de movimiento
Dado que la velocidad es el cambio de posición del automóvil durante un intervalo de tiempo correspondiente, y somos libres de seleccionar el intervalo de tiempo como el intervalo de tiempo entre exposiciones en nuestra fotografía de exposición múltiple, la velocidad es simplemente el cambio en la posición del automóvil “entre puntos”. Así, las flechas (vectores) en el diagrama de movimiento a continuación representan la velocidad del automóvil.

Ahora podemos describir la velocidad del automóvil. Dado que los vectores de velocidad siempre apuntan en la dirección positiva, la velocidad siempre es positiva. El automóvil comienza con una gran velocidad positiva que disminuye gradualmente hasta que la velocidad del automóvil es cero al final de su movimiento.
Determinar la aceleración a partir de un diagrama de movimiento
Dado que la aceleración es el cambio de velocidad del automóvil durante un intervalo de tiempo correspondiente, y somos libres de seleccionar el intervalo de tiempo como el intervalo de tiempo entre exposiciones en nuestra fotografía de exposición múltiple, podemos determinar la aceleración comparando dos velocidades sucesivas. El cambio en estos vectores de velocidad representará la aceleración.
Para determinar la aceleración,
- seleccionar dos vectores de velocidad sucesivos,
- dibujarlos a partir del mismo punto,
- construir el vector (flecha) que conecta la punta del primer vector de velocidad con la punta del segundo vector de velocidad.
- El vector que has construido representa la aceleración.
La comparación de los vectores de velocidad primero y segundo conduce al vector de aceleración que se muestra a continuación:
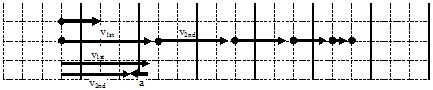
Así, la aceleración apunta a la izquierda y por lo tanto es negativa. Podrías construir el vector de aceleración en cada punto del tiempo, pero ojalá puedas ver que mientras los vectores de velocidad continúen apuntando hacia la derecha y disminuyan en magnitud, la aceleración seguirá siendo negativa.
Así, con la ayuda de un diagrama de movimiento, puede extraer mucha información sobre la posición, velocidad y aceleración de un objeto. Estás en camino hacia una descripción cinemática completa.