
04. Tabla de Información de Movimiento - Gráficos de Movimiento
- Page ID
- 132686

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\){{Template.dropdown {path:” /Spiral_physics/i_-_mechanics/model_one%3a_1d_constant-force_partículas_model/03. _Cinemática "}}}
Tabla de Información de Movimiento - Gráficos de Movimiento
Después de construir las dos representaciones cualitativas del movimiento (el diagrama de movimiento y los gráficos de movimiento), estamos listos para abordar los aspectos cuantitativos del movimiento.

ahora puede asignar valores numéricos a varias de las variables cinemáticas. Un vistazo a la descripción de la situación debería indicar que se presenta información sobre el automóvil en dos eventos distintos. La información está disponible sobre el automóvil en el instante en que el conductor aplica los frenos (se da la velocidad), y en el instante en que el conductor se detiene (se le da la posición). Otra información también se puede determinar haciendo referencia al diagrama de movimiento. Para tabular esta información, se debe construir una tabla de movimiento.
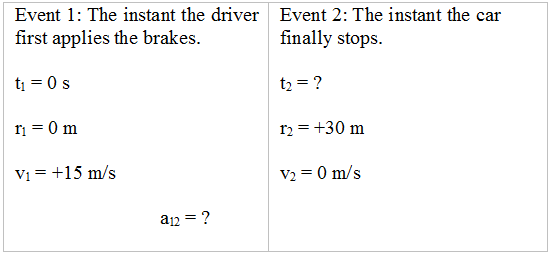
Además de la información explícitamente dada, la velocidad en el primer evento y la posición en el segundo evento, se puede extraer otra información de la declaración del problema y el diagrama de movimiento.
| Ejemplo |
-
la posición del automóvil en el primer evento es cero porque el origen del sistema de coordenadas está en este punto,
-
la hora en el primer instante puede ser “puesta a cero” imaginando un cronómetro hipotético en el que se hace clic cuando el automóvil comienza a frenar,
-
y la velocidad en el segundo evento es cero porque el auto está parado.
Ya que se está trabajando bajo el supuesto en este modelo de que la aceleración es constante, la aceleración entre los dos instantes en el tiempo es algún valor desconocido, constante. Para recordarte que esta suposición está en su lugar, la aceleración no está etiquetada en el primer instante, un 1, o el segundo instante, un 2, sino más bien como la aceleración entre los dos instantes en el tiempo, un 12.
Ahora se tiene una tabulación completa de toda la información presentada, tanto explícita como implícitamente, en la descripción de la situación. Además, ahora se puede ver fácilmente que la única información cinemática que no se conoce sobre la situación es la supuesta aceleración constante del auto y el momento en que finalmente se detiene. De esta manera, para completar una descripción cinemática de la situación, se deben determinar estas dos cantidades. Lo que quizás no sepas es que ya te han presentado la información necesaria para determinar estas dos incógnitas.
Haciendo las matemáticas (Cuantitativas)
En la parte de conceptos y principios de esta unidad, se le presentaron dos relaciones formales, matemáticas, las definiciones de velocidad y aceleración. En el ejemplo en el que estás trabajando, hay dos cantidades cinemáticas desconocidas. Debes recordar del álgebra que dos ecuaciones son suficientes para calcular dos incógnitas. De esta manera, al aplicar las dos definiciones, se debe poder determinar la aceleración del automóvil y el momento en el que llega a descansar.
Aunque simplemente puede aplicar las dos definiciones directamente, normalmente las dos definiciones se reescriben, después de algunas reordenaciones algebraicas, en dos relaciones diferentes. Este reordenamiento es simplemente para facilitar el álgebra involucrada en la resolución de las incógnitas. De ninguna manera es necesario resolver el problema. De hecho, las dos definiciones se pueden escribir de una gran cantidad de formas diferentes, aunque esto no quiere decir que haya una gran cantidad de fórmulas diferentes que deba memorizar para analizar situaciones cinemáticas. Sólo hay dos relaciones cinemáticas independientes. Las dos relaciones cinemáticas que usaremos cuando la aceleración sea constante son:
y

Para finalizar el análisis,
| Evento 1: En el instante en que el conductor primero aplica los frenos. t 1 = 0 s r 1 = 0 m v 1 = +15 m/s a 12 = | Evento 2: En el instante en que el auto finalmente se detiene. t 2 = r 2 = +30 m v 2 = 0 m/s |
simplemente escriba las dos relaciones cinemáticas, ingrese las variables cinemáticas conocidas de la tabla de movimiento y resuelva las dos relaciones para las dos incógnitas. (Este proceso no es física, es álgebra.)
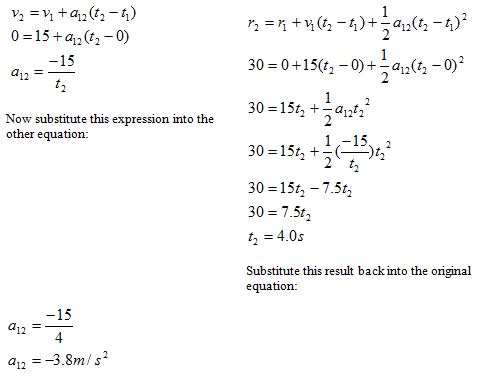
Por lo tanto, el automóvil debe haber acelerado a 3.8 m/s 2 en la dirección negativa, y parado después de 4.0 segundos. La descripción cinemática de la situación es completa.