
06. Análisis Simbólico
- Page ID
- 132672

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\){{Template.dropdown {path:” /Spiral_physics/i_-_mechanics/model_one%3a_1d_constant-force_partículas_model/03. _Cinemática "}}}
Sin números, solo variables
Resolver el problema usando solo variables te ahorrará tiempo y dolor de mano. El objetivo aquí es reconocer primero lo que necesitas resolver. Entonces resuelve para la variable sin números, para que tengas tu ecuación en la forma que mejor modele para qué necesitas usarla. Causando que solo conectes todos tus números y hagas estallar una respuesta, sin tener que mover decimales largos y fracciones complejas a cada lado de la ecuación. Por lo tanto resolviendo su problema con un error mínimo y usando menos tiempo.
Considera la siguiente situación:
El conductor de un automóvil ve de repente un obstáculo bloqueando su carril. Determinar la distancia total que recorre el auto entre ver el obstáculo y detenerse (d) en función de la velocidad inicial del automóvil (v i) y la magnitud de su aceleración mientras se detiene (a s).
Como siempre, el primer paso para analizar el movimiento es dibujar un diagrama de movimiento.

En lugar de calcular la distancia de parada para valores particulares de velocidad inicial y aceleración, el objetivo de esta actividad es determinar, en general, cómo la distancia de parada depende de estos dos parámetros. Si podemos construir esta función, entonces podemos usar el resultado para calcular la distancia de parada para cualquier automóvil si conocemos su velocidad inicial y aceleración de parada.
Aunque esto suena como una tarea diferente a la que hemos hecho en los dos ejemplos anteriores, abordaremos esta tarea exactamente de la misma manera, tabulando lo que sabemos sobre la situación,
| Evento 1: En el instante en que el conductor golpea los frenos. t 1 = 0 s r 1 = 0 m v 1 = v i a 12 = -a s | Evento 2: El instante en que el auto se detiene. t 2 = r 2 = d v 2 = 0 m/s |
y luego aplicar nuestras dos relaciones cinemáticas:

Dado que nuestro objetivo es determinar d en función de v i y a s, debemos eliminar t 2. Para ello, resuelva para t 2 en la ecuación de la izquierda y sustituya esta expresión por la ecuación derecha.
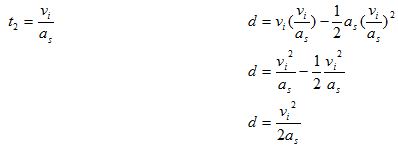
Así, la distancia de parada parece ser proporcional al cuadrado de la velocidad inicial e inversamente proporcional a la aceleración de parada. ¿Tiene sentido esto?
Para determinar si una expresión simbólica es sensible, a menudo es útil verificar casos limitantes. Un caso limitante es cuando una de las variables de la expresión adquiere un valor extremo, típicamente cero o infinito. Por ejemplo, si la velocidad inicial del auto era cero la distancia de frenado tendría que ser también cero, ¡ya que el auto nunca se movía! Permitir que v i sea igual a cero en la expresión anterior da como resultado una distancia de parada de cero, por lo que nuestra expresión “pasa” esta prueba lógica. Otro caso limitante sería establecer la aceleración del automóvil igual a cero. Sin aceleración, el auto nunca debe detenerse. En nuestra expresión, establecer la aceleración igual a cero da como resultado una distancia de parada infinita, lo que nuevamente concuerda con el sentido común. Si nuestra expresión no diera los resultados correctos en estos casos limitantes, sabríamos que cometimos un error en algún lugar de la derivación (y, por supuesto, entonces volveríamos y encontraríamos nuestro error y lo arreglaríamos porque somos buenos estudiantes...).