
04. Herramientas de análisis 3
- Page ID
- 132636

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)Aplicación de la relación impulso-momento a una colisión
Probablemente la aplicación más útil de la relación impulso-momento es en el estudio de las colisiones. Por ejemplo:
Lejos de la tierra, una sonda espacial de 250 kg, que se mueve a 5 km/s, choca de frente con una pieza de desechos espaciales de 65 kg inicialmente en reposo. Los desechos se enredan en los colectores solares de la sonda.
Vamos a elegir:
Evento 1: El instante antes de la colisión.
Evento 2: El instante en que los desechos y la sonda alcanzan una velocidad común.
Los diagramas de cuerpo libre para los dos objetos durante este intervalo de tiempo se muestran a continuación.
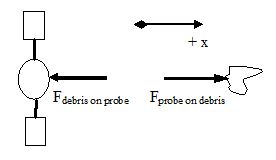
La aplicación de la relación impulso-momento a cada objeto por separado produce:
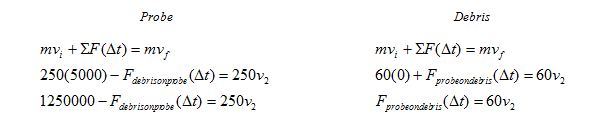
Observe que las velocidades finales de los dos objetos son las mismas, porque permanecen unidos tras la colisión. Además, los Dt's son los mismos porque el intervalo de tiempo durante el cual la fuerza de los desechos actúa sobre la sonda debe ser el mismo que el intervalo de tiempo durante el cual la fuerza de la sonda actúa sobre los desechos. De hecho, estas dos fuerzas deben ser iguales entre sí en magnitud según la Tercera Ley de Newton.
Así, los impulsos deben cancelarse si se suman las dos ecuaciones:
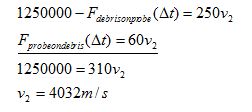
La sonda se ralentiza a una velocidad de 4032 m/s (y los escombros cambian de dirección y se aceleran a una velocidad de 4032 m/s) a través de la colisión. Así, aunque desconocemos la magnitud de la fuerza involucrada, o la duración de la colisión, podemos calcular las velocidades finales de los dos objetos que colisionan. Esto se debe a que las fuerzas involucradas comprenden una interacción, y por la Tercera Ley de Newton las fuerzas que comprenden una interacción son siempre iguales en magnitud y opuestas en dirección.
De hecho, en problemas que involucran colisiones (o explosiones, que para los físicos son simplemente colisiones jugadas hacia atrás en el tiempo!) , casi siempre se debe aplicar la relación impulso-impulso a los objetos que interactúan porque las fuerzas involucradas comprenden una interacción. Así, al sumar tus ecuaciones juntas, estos términos siempre sumarán a cero. Esto a menudo le permitirá determinar las velocidades finales de los objetos colisionantes.
En conclusión, debo señalar que la sonda pierde impulso durante la colisión y que los escombros obtienen exactamente la misma cantidad de impulso (verifique los números para verificar esta afirmación). El impulso se transfiere de la sonda a los desechos a través de la acción del impulso que la sonda y los desechos ejercen entre sí. El traslado de impulso de la sonda a los escombros es análogo a lanzar un bloque de madera desde la sala de juegos al patio: ¡La sala de juegos ahora tiene una cuadra menos y el patio tiene una más!
Aplicación de la relación trabajo-energía a la misma colisión
Volvamos al escenario de colisión discutido anteriormente e intentemos investigarlo usando energía de trabajo.
Lejos de la tierra, una sonda espacial de 250 kg, que se mueve a 5 km/s, choca de frente con una pieza de desechos espaciales de 65 kg inicialmente en reposo. Los desechos se enredan en los colectores solares de la sonda.
Vamos a elegir:
Evento 1: El instante antes de la colisión.
Evento 2: El instante en que los desechos y la sonda alcanzan una velocidad común.
Los diagramas de cuerpo libre para los dos objetos durante este intervalo de tiempo se muestran a continuación.
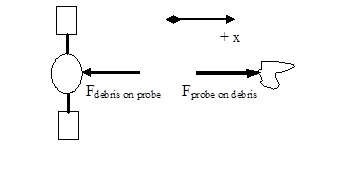
La aplicación de la relación trabajo-energía a cada objeto por separado produce:
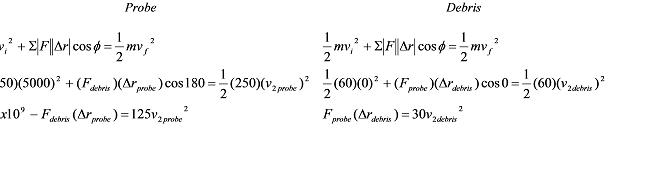
Las velocidades finales de los dos objetos son las mismas, porque permanecen unidos tras la colisión, y las dos fuerzas son las mismas según la Tercera Ley de Newton. Sin embargo, estas dos ecuaciones no se pueden sumar y resolver porque las dos distancias sobre las que actúan las fuerzas, Dr sonda y Dr escombros, no son necesariamente iguales. Durante la colisión, el centro de la sonda se moverá una distancia diferente a la del centro de los escombros [1]. Como estas dos distancias son diferentes, las obras no se cancelarán como lo hicieron los impulsos, ¡y las ecuaciones no son solucionables!
De hecho, dado que conocemos v 2 = 4032 m/s de nuestro análisis de impulso,
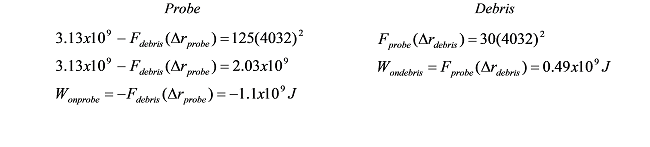
Obviously, the two works do not cancel. In fact, the internal work, or work done by the objects on each other, totals -0.61 x 109 J. This means that there is 0.61 x 109 J less kinetic energy in the system of the probe and the debris after the collision than before the collision. This is sometimes referred to as the energy lost in the collision, although the energy is not lost but rather converted into other forms of energy (i.e., other hiding places for the wooden blocks that have yet to be discussed), such as thermal energy.
In short, the work-energy relation (as it now stands) can not be used to effectively analyze collisions unless additional information regarding the internal energy is available. Occasionally, an approximation is made in which the total internal work is zero. When this approximation is made, the collision is referred to as an elastic collision. Realistic collisions, in which the total internal energy is not zero and kinetic energy is “lost”, are referred to as inelastic collisions. In other words, during an elastic collision the two objects “bounce apart” whereas during an inelastic collision they “stick together.”
[1] If the two objects were actually particles, rather than beingapproximated as particles, then the two distances would have to be the same and the two works would cancel when the equation were added together.