
15.5: Ejemplos trabajados




- Última actualización
- 30 oct 2022
- Guardar como PDF

( \newcommand{\kernel}{\mathrm{null}\,}\)
Ejemplo 15.1 Colisión Elástica Unidimensional entre Dos Objetos

Considera la colisión elástica de dos carros a lo largo de una pista; el carro incidente 1 tiene masam1 andmoveswithinitialspeed\(v1,i. El carro objetivo tiene masam2=2m1 e inicialmente está en reposo,v2,i=0, (Figura 15.7). Inmediatamente después de la colisión, el carro incidente tiene velocidad finalv1,f y el carro objetivo tiene velocidad finalv2,f. Calcular el componente x final de las velocidades de los carros en función de la velocidad inicialv1,i.
Solución: El diagrama de flujo de momento para los objetos antes (estado inicial) y después (estado final) de la colisión se muestra en la Figura 15.7. Podemos usar inmediatamente nuestros resultados anteriores conm2=2m1 yv2,i=0. El componente x final de la velocidad del carro 1 viene dado por la Ecuación (15.3.14), donde usamosv1x,i=v1,i.
v1x,f=−13v1,iEl componente x final de la velocidad del carro 2 viene dado por la Ecuación (15.4.17)v2x,f=23v1,i
Ejemplo 15.2 La disipación de energía cinética en una colisión completamente inelástica entre dos objetos

Un carro incidente de masam1 y velocidad inicialv1,i choca completamente inelásticamente con un carro de masam2 que inicialmente está en reposo (Figura 15.7b). No hay fuerzas externas que actúen sobre los objetos en la dirección de la colisión. EncuentraΔK/Kinitial =(Kfinal −Kinitial )/Kinitial
Solución: En ausencia de cualquier fuerza neta sobre el sistema consistente en los dos carros, el impulso después de la colisión será el mismo que antes de la colisión. Después de la colisión, los carros se moverán en la dirección de la velocidad inicial del carro incidente con una velocidad comúnvf encontrada al aplicar la condición de impulso
m1v1,i=(m1+m2)vf⇒vf=m1m1+m2v1,iLa velocidad relativa inicial esvreli=v1,i. La velocidad relativa final es cero porque los carros se pegan juntos por lo que usando la Ecuación (15.3.26), el cambio en la energía cinética esΔK=−12μ(vreli)2=−12m1m2m1+m2v21,i La relación del cambio en la energía cinética a la energía cinética inicial es entoncesΔK/Kinitial=−m2m1+m2 Como verificación, podemos calcular el cambio en la energía cinética a través deΔK=(Kf−Ki)=12(m1+m2)v2f−12v21,i=12(m1+m2)(m1m1+m2)2v21,i−12v21,i=(m1m1+m2−1)(12m1v21,i)=−12m1m2m1+m2v21,i
de acuerdo con la Ecuación (15.4.4).
Ejemplo 15.3 Superbolas que rebotan
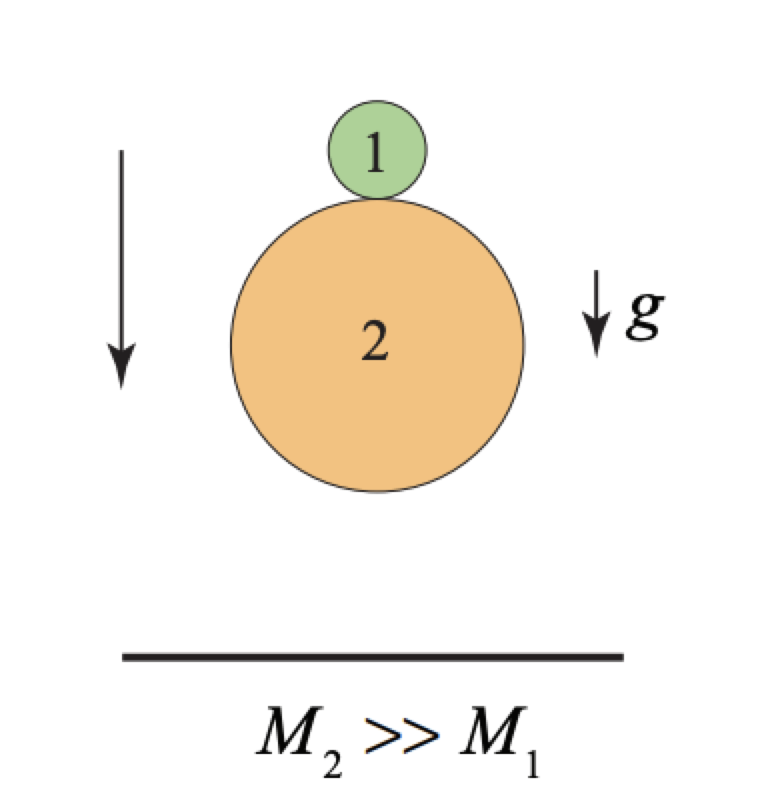
Considera dos bolas que se dejan caer desde una altura sobre el suelo, unahi encima de la otra (Figura 15.8). La bola 1 está en la parte superior y tiene masaM1, y la bola 2 está debajo y tiene masaM2 conM2>>M1. Supongamos que no hay pérdida de energía cinética durante todas las colisiones. La bola 2 primero choca con el suelo y rebota. Entonces, a medida que la bola 2 comienza a moverse hacia arriba, choca con la bola 1 que sigue moviéndose hacia abajo (figura abajo a la izquierda). ¿Qué tan alto rebotará la bola 1 en el aire? Pista: considera esta colisión como la ve un observador que se mueve hacia arriba con la misma velocidad que tiene la bola 2 después de que choca con el suelo. ¿Qué velocidad tiene la bola 1 en este marco de referencia después de que choca con la bola 2?
Solución
El sistema consta de dos bolas y la tierra. Hay cinco estados especiales para esta moción que se muestran en la siguiente figura.

Estado Inicial: las bolas se liberan del reposo a una alturahi sobre el suelo.
Estado A: las bolas apenas llegan al suelo con velocidadva=√2ghi. Esto se desprende deΔEmесh=0⇒ΔK=−ΔU. Por lo tanto(1/2)mv2a−0=−mgΔh=mghi⇒va=√2ghi
Estado B: inmediatamente antes de la colisión de las bolas. La bola 2 ha chocado con el suelo y ha invertido dirección con la misma velocidad,va pero la bola 1 sigue moviéndose hacia abajo con la velocidadva.
Estado C: inmediatamente después de la colisión de las bolas. Porque estamos asumiendo que lam2≫m1 bola 2 no cambia su velocidad a consecuencia de la colisión por lo que sigue moviéndose 2 hacia arriba con la velocidadva. Como resultado de la colisión, la bola 1 se mueve hacia arriba con velocidadvb
Estado Final: la bola 1 alcanza una altura máximahf=v2b/2g sobre el suelo. Esto de nuevo se deduce deΔK=−ΔU⇒0−(1/2)mv2b=−mgΔh=−mghf⇒hf=v2b/2g
Elección del marco de referencia:
Como se indica en la pista anterior, esta colisión se analiza mejor a partir del marco de referencia de un observador que se mueve hacia arriba con velocidadva la velocidad de la bola 2 justo después de que rebotó con el suelo. En este marco inmediatamente, antes de la colisión, la bola 1 se mueve hacia abajo con una velocidadv′b que es el doble de la velocidad vista por un observador en reposo en el suelo (marco de referencia de laboratorio). v′a=2va
La masa de la bola 2 es mucho mayor que la masa de la bola 1,m2≫m1 Esto nos permite considerar que la colisión (entre los Estados B y C) equivale a que la bola 1 rebota en una pared dura, mientras que la bola 2 prácticamente no experimenta retroceso. De ahí que la bola 2 permanezca en reposo en el marco de referencia moviéndose hacia arribaVa con la velocidad con respecto al observador en reposo en el suelo. Antes de la colisión, la bola 1 tiene velocidadv′a=2va Dado que no hay pérdida de energía cinética durante la colisión, el resultado de la colisión es que la bola 1 cambia de dirección pero mantiene la misma velocidad,v′b=2va Sin embargo, de acuerdo con un observador en reposo en el suelo, después de que la bola de colisión 1 se esté moviendo hacia arriba con velocidadvb=2va+va=3va Mientras rebota, la energía mecánica de la superbola más pequeña es constante (consideramos la superbola más pequeña y la Tierra como un sistema) de ahí que entre el Estado C y el Estado Final,ΔK+ΔU=0 El cambio en la energía cinética esΔK=−12m1(3va)2 El cambio en la energía potencial esΔU=m1ghf Entonces la condición de que la energía mecánica sea constante (Ecuación (15.5.10)) es ahora−12m1(3v1a)2+m1ghf=0 Podemos reescribir la Ecuación (15.5.13) comom1ghf=912m1(va)2 Recordemos que también podemos usar el hecho de que la energía mecánica no cambia entre el Estado Inicial y el Estado A dando una ecuación similar a la Ecuación (15.5.14), m1ghi=12m1(va)2Ahora sustituya la expresión por la energía cinética en la Ecuación (15.5.15) por la Ecuación (15.5.14) rindiendom1ghf=9m1ghi Así la bola 1 alcanza una altura máximahf=9hi