
23.4: Ejemplos trabajados

( \newcommand{\kernel}{\mathrm{null}\,}\)
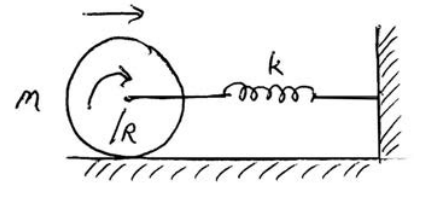
Ejemplo 23.3: Cilindro oscilante rodante sin deslizamiento
Acople un cilindro sólido de masa M y radio R a un resorte horizontal sin masa con constante de resorte k para que pueda rodar sin deslizarse a lo largo de una superficie horizontal. En el tiempo t, el centro de masa del cilindro se mueve con velocidadV_{c m} y el resorte se comprime vθ ,1 = ± 2gl (1− cosθ0). una distancia x de su longitud de equilibrio. ¿Cuál es el periodo de movimiento armónico simple para el centro de masa del cilindro?
Solución: En el tiempo t, la energía del cilindro rodante y el sistema de resorte es
E=\frac{1}{2} M v_{c m}^{2}+\frac{1}{2} I_{c m}\left(\frac{d \theta}{d t}\right)^{2}+\frac{1}{2} k x^{2} \nonumber
donde x es la cantidad que el resorte ha comprimido,I_{c m}=(1 / 2) M R^{2}, y porque está rodando sin deslizarse
\frac{d \theta}{d t}=\frac{V_{c m}}{R} \nonumber
Por lo tanto la energía es
E=\frac{1}{2} M V_{c m}^{2}+\frac{1}{4} M R^{2}\left(\frac{V_{c m}}{R}\right)^{2}+\frac{1}{2} k x^{2}=\frac{3}{4} M V_{c m}^{2}+\frac{1}{2} k x^{2} \nonumber
La energía es constante (ninguna fuerza no conservadora está trabajando en el sistema) por lo que
0=\frac{d E}{d t}=\frac{3}{4} 2 M V_{c m} \frac{d V_{c m}}{d t}+\frac{1}{2} k 2 x \frac{d x}{d t}=V_{c m}\left(\frac{3}{2} M \frac{d^{2} x}{d t^{2}}+k x\right) \nonumber
Debido a que noV_{c m} es cero la mayor parte del tiempo, el desplazamiento del resorte satisface una ecuación simple del oscilador armónico
\frac{d^{2} x}{d t^{2}}+\frac{2 k}{3 M} x=0 \nonumber
De ahí que el periodo sea
T=\frac{2 \pi}{\omega_{0}}=2 \pi \sqrt{\frac{3 M}{2 k}} \nonumber
Ejemplo 23.4: Tubo en U
Un tubo en U abierto en ambos extremos se llena con un fluido incompresible de densidad\rho. El área transversal A del tubo es uniforme y la longitud total del fluido en el tubo es L. Se utiliza un pistón para deprimir la altura de la columna de líquido en un lado por una distanciax_{0} (elevando el otro lado por la misma distancia) y luego se retira rápidamente (Figura 23.10). ¿Cuál es la frecuencia angular del movimiento armónico simple subsiguiente? Olvida cualquier fuerza resistiva y en las paredes del tubo en U.

Solución: Utilizaremos la conservación de la energía. Primero elige como cero para la energía potencial gravitacional en la configuración donde los niveles de agua son iguales en ambos lados del tubo. Cuando el pistón de un lado deprime el fluido, éste se eleva por el otro. En un instante dado en el tiempo cuando una porción del fluido de masa\Delta m=\rho A x está a una altura x por encima de la altura de equilibrio (Figura 23.11), la energía potencial del fluido viene dada por
U=\Delta m g x=(\rho A x) g x=\rho \operatorname{Ag} x^{2} \nonumber
En ese mismo instante todo el fluido de longitud L y masam=\rho A L se mueve con velocidad v, por lo que la energía cinética es
K=\frac{1}{2} m v^{2}=\frac{1}{2} \rho A L v^{2} \nonumber
Así la energía total es
E=K+U=\frac{1}{2} \rho A L v^{2}+\rho A g x^{2} \nonumber
Al descuidar la fuerza resistiva, la energía mecánica del fluido es constante. Por lo tanto
0=\frac{d E}{d t}=\rho A L v \frac{d v}{d t}+2 \rho \operatorname{Ag} x \frac{d x}{d t} \nonumber
Si solo consideramos la parte superior del fluido por encima de la posición de equilibrio en el brazo derecho en la Figura 23.13, reescribimos la Ecuación (23.4.10) como
0=\frac{d E}{d t}=\rho A L v_{x} \frac{d v_{x}}{d t}+2 \rho A g x \frac{d x}{d t} \nonumber
dondev_{x}=d x / d t. Ahora reescribimos la condición energética usandod v_{x} / d t=d^{2} x / d t^{2} como
0=v_{x} \rho A\left(L \frac{d^{2} x}{d t^{2}}+2 g x\right) \nonumber
Esta condición se cumple cuandov_{x}=0 es decir, la condición de equilibrio o cuando
0=L \frac{d^{2} x}{d t^{2}}+2 g x \nonumber
Esta última condición se puede escribir como
\frac{d^{2} x}{d t^{2}}=-\frac{2 g}{L} x \nonumber
Esta última ecuación es la ecuación simple del oscilador armónico. Usando las mismas técnicas matemáticas que usamos para el sistema de bloque de resorte, la solución para la altura del fluido por encima de la posición de equilibrio viene dada por
x(t)=B \cos \left(\omega_{0} t\right)+C \sin \left(\omega_{0} t\right) \nonumber
donde
\omega_{0}=\sqrt{\frac{2 g}{L}} \nonumber
es la frecuencia angular de oscilación. El componente x de la velocidad del fluido en el lado derecho del tubo en U viene dado por
v_{x}(t)=\frac{d x(t)}{d t}=-\omega_{0} B \sin \left(\omega_{0} t\right)+\omega_{0} C \cos \left(\omega_{0} t\right) \nonumber
Los coeficientes B y C están determinados por las condiciones iniciales. At=0 la altura del fluido esx(t=0)=B=x_{0}. At=0, la velocidad es cero asív_{x}(t=0)=\omega_{0} C=0, de ahíC=0. La altura del fluido por encima de la posición de equilibrio en el lado derecho del tubo en U en función del tiempo es así
x(t)=x_{0} \cos (\sqrt{\frac{2 g}{L}} t) \nonumber