
3.4: Notación
- Page ID
- 131390

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\(\newcommand{\longvect}{\overrightarrow}\)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)En esta sección voy a suponer que tenemos\( n\) partículas dispersas a través del espacio tridimensional. Estaremos derivando algunas propiedades y teoremas generales —y, en la medida en que se pueda considerar que un cuerpo sólido está constituido por un sistema de partículas, estas propiedades y teoremas se aplicarán igualmente a un cuerpo sólido.
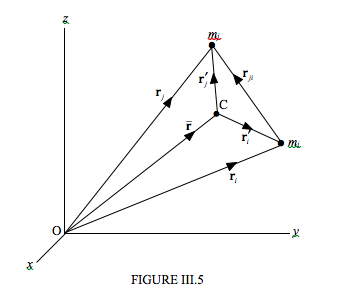
En la Figura III.5, he dibujado apenas dos de las partículas, (el resto de ellas quedan a tu imaginación) y el centro de masa C del sistema.
Una partícula dada puede tener una fuerza externa\( \bf{F}_{i}\) que actúa sobre ella. (Puede, por supuesto, tener varias fuerzas externas que actúan sobre ella, pero me refiero con\( \bf{F}_{i}\) la suma vectorial de todas las fuerzas externas que actúan sobre la i ésima partícula.) También puede interactuar con las otras partículas en el sistema, y en consecuencia puede tener fuerzas internas que\( \bf{F}_{ij}\) actúan sobre él, donde\( j\) va de 1 a\( n\) excepción de\( i\). Defino la suma vectorial\( \bf F = \sum F_{i}\) como la fuerza externa total que actúa sobre el sistema.
Voy a establecer la siguiente notación para los efectos de este capítulo.
- Masa de la partícula \( i\)th =\( m_{i}\)
- Masa total del sistema\(M= \sum m_{i}\)
- Vector de posición de la partícula \( i\)th referida a un punto fijo O:\( \textbf{r}_{i} = x_{i} \hat{\textbf{x}} + y_{i} \hat{\textbf{y}} + z_{i} \hat{\textbf{z}}\)
- Velocidad de la partícula \( i\)th referida a un punto fijo O:\( \textbf{r}_{i}\) o\( \textbf{v}_{i}\) (Velocidad =\( v_{i}\))
- Momento lineal de la partícula \( i\)th referida a un punto fijo O:\(\textbf{p}_{i} = m_{i} \textbf{v}_{i}\)
- Momento lineal del sistema:\(\textbf{P} = \sum \textbf{P}_{i} = \sum m_{i} \textbf{v}_{i}\)
- Fuerza externa sobre la partícula \( i\)th:\(\textbf{F}_{i}\)
- Fuerza externa total en el sistema:\( \textbf{F} = \sum \textbf{F}_{i}\)
- Momento angular (momento de momento) de la partícula \( i\)th referida a un punto fijo O:\[\textbf{l}_{i} = \textbf{r}_{i} \times \textbf{p}_{i} \nonumber \]
- Momento angular del sistema:\( \textbf{L} = \sum \textbf{l}_{i} = \sum \textbf{r}_{i} \times \textbf{p}_{i}\)
- Par de torsión en la i ésima partícula referida a un punto fijo O:\( \boldsymbol\tau_{i} = \textbf{r}_{i} \times \textbf{F}_{i}\)
- Par externo total en el sistema con respecto al origen:\[ \boldsymbol\tau = \sum \boldsymbol\tau_{i} = \sum \textbf{r}_{i} \times \textbf{F}_{i} \nonumber \]
Energía cinética del sistema: (Estamos tratando con un sistema de partículas, por lo que estamos tratando solo con energía cinética traslacional, sin rotación ni vibración):
\( T = \sum \frac{1}{2} m_{i}v_{i}^{2} \)
Vector de posición del centro de masa referido a un punto fijo O:\(\overline{\textbf{r}}_{i} =\overline{x}\hat{\textbf{x}} + \overline{y}\hat{\textbf{y}} + \overline{z}\hat{\textbf{z}} \)
El centro de masa está definido por\(M \overline{\textbf{r}} = \sum m_{i} \textbf{r}_{i}\)
Velocidad del centro de masa referida a un punto fijo O:\( \overline{\textbf{r}} = \overline{\textbf{v}}\) (Velocidad =\( \overline{v}\))
Para los vectores de posición, los símbolos de subíndice único no cebados se referirán a O. Los símbolos de subíndice único cebados se referirán a C. Esto quedará claro, espero, a partir de la Figura III.5.
Vector de posición de la partícula \( i\)th referida al centro de masa C:\( \textbf{r}'_{i} = \textbf{r}_{i} - \overline{\textbf{r}}_{i}\)
Vector de posición de la partícula \( j\)con respecto a la partícula \( i\):\(\textbf{r}_{ij} = \textbf{r}_{j} - \textbf{r}_{i}\)
Fuerza (interna) ejercida sobre partícula \( i\)por partícula \( j\):\(\textbf{F}_{ij}\)
Fuerza (interna) ejercida sobre partícula \( j\)por partícula \( i\):\(\textbf{F}_{ji}\)
Si la fuerza entre dos partículas es repulsiva (por ejemplo, entre partículas cargadas electricamente del mismo signo), entonces\(\textbf{F}_{ji}\) y\(\textbf{r}_{ji}\) están en la misma dirección. Pero si la fuerza es una fuerza atractiva,\(\textbf{F}_{ji}\) y\(\textbf{r}_{ji}\) están en direcciones opuestas.
Según la Tercera Ley de Movimiento de Newton (Lex III),\(\textbf{F}_{ij} = -\textbf{F}_{ji} \)
Momento angular total del sistema referido al centro de masa C:\(\textbf{L}_{C}\)
Par externo total en el sistema referido al centro de masa C:\(\boldsymbol \tau_{C}\)
Para la velocidad del centro de masa puedo usar cualquiera\( \dot{\overline{\textbf{r}}}\) o\( \overline{\textbf{v}}\)
O es un origen arbitrario de coordenadas. C es el centro de masa.
Tenga en cuenta que
\ begin {ecuación}\\ textbf {r} _ {i} =\ overline {\ textbf {r}} +\ textbf {r} _ _ {i} ^ {\ prime}\ tag {3.4.1}\ label {eq:3.4.1}\ end {ecuación}
y por lo tanto
\ begin {ecuación}\\ punto {\ overline {\ textbf {r}} _ {i}} =\ punto {\ overline {\ textbf {r}}} +\ punto {\ textbf {r} _ _ {i} ^ {\ prime}};\ tag {3.4.2}\ etiqueta {eq:3.4.2}\ end {ecuación}
es decir
\ begin {ecuación}\\ textbf {v} _ {i} =\ overline {\ textbf {v}} +\ textbf {v} _ _ {i} ^ {\ prime}\ tag {3.4.3}\ etiqueta {eq:3.4.3}\ end {ecuación}
Tenga en cuenta también que
\ begin {ecuación}\\ suma m_ {i}\ textbf {r} _ {i} ^ {\ prime} = 0\ tag {3.4.4}\ label {eq:3.4.4}\ end {ecuación}
Tenga en cuenta además que
\ begin {ecuación}\ suma m_ {i}\ textbf {v} '_i=\ suma m_ {i} (\ textbf {v} _i -\ overline {\ textbf {v}}) =\ suma m_ {i}\ textbf {v} _ _ {i} -\ overline {\ textbf {v}}\ suma m_ {i} = M\ overline {\ textbf {v}} -\ overline {\ textbf {v}} M = 0\ tag {3.4.5}\ label {eq:3.4.5}\ end {ecuación}
Es decir, el impulso lineal total con respecto al centro de masa es cero.
Una vez establecida nuestra notación, pasamos ahora a algunos teoremas relativos a los sistemas de partículas. Puede ser más útil para ti evocar una imagen física en tu mente lo que significan los siguientes teoremas que memorizar los detalles de las derivaciones.