
4.11: Apéndice
- Page ID
- 131257

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\(\newcommand{\longvect}{\overrightarrow}\)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)En la Sección 4.4 planteamos la cuestión de si el ángulo es una cantidad dimensionada o adimensional, y en la Sección 4.8 planteamos la cuestión de si el ángulo es una cantidad vectorial.
Puedo presentar dos argumentos. Uno de ellos demostrará incontrovertiblemente que el ángulo es adimensional. El otro demostrará, igualmente incontrovertiblemente, e igualmente convincentemente que el ángulo tiene dimensiones. El ángulo, como usted sabe, se define como la relación entre la longitud del arco y el radio. Es la relación de dos longitudes, y por lo tanto es incontrovertiblemente adimensional. Q.E.D. Por otro lado, es necesario indicar las unidades en las que se expresa el ángulo. No se puede simplemente hablar de un ángulo de 1. Debe indicar si es de 1 grado o de 1 grado. El ángulo por lo tanto tiene dimensiones. Q.E.D. Entonces, puede elegir. En muchos contextos, me gusta pensar en el ángulo como una cantidad dimensionada, teniendo dimensiones\( \Theta\). Es decir, no una combinación de masa, longitud y tiempo, sino que tiene sus propias dimensiones por derecho propio. Encuentro que puedo continuar con el análisis dimensional con éxito así.
Ahora para la pregunta: ¿El ángulo es un vector?
Un ángulo ciertamente tiene tanto magnitud como una dirección asociada a él. Por lo tanto, la dirección asociada con el ángulo
está en ángulo recto con el plano de la pantalla, o el papel.
No obstante, esto evidentemente no es suficiente para que sea un vector en el sentido de que lo conocemos.
Por ejemplo, si giras a través de un ángulo a, y luego a través de un ángulo b, no se puede decir que la red resultante de estos es girar a través de un ángulo\( c\), donde\( c^{2}=a^{2}+b^{2}-2ab\cos C\).
Así, aunque el ángulo tiene tanto magnitud como dirección, y podría pensarse hasta ahora como un vector, los ángulos no obedecen a la ley ordinaria del triángulo de la suma vectorial. Por esta razón, a los ángulos a veces se les llama “pseudo-vectores”.
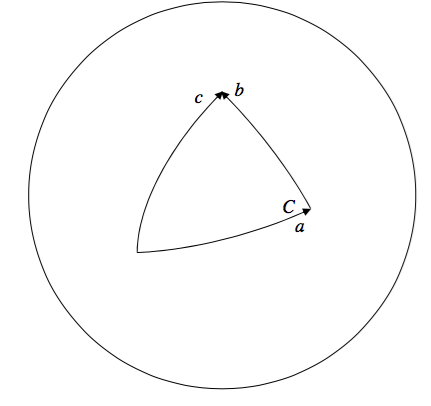
De hecho, como te dirá cualquier estudiante de astronomía, la relación correcta entre los ángulos es
\( \cos c=\cos a\cos b+\sin a\sin b\cos C\).
Si los ángulos\( a, b, c\) (no\( C\)) son muy pequeños, entonces el triángulo se vuelve casi plano. Los ángulos se agregan cada vez más como la regla de triángulo plano habitual para la adición de vectores. Esto probablemente sea obvio al pensar en la geometría, pero también puedes convencerte de ello expandiendo los senos y cosenos (a excepción de\( \cos C\)) como series, y, al segundo orden de pequeñas cantidades\( (\cos \theta\approx 1-\frac{1}{2}\theta^{2},\sin\theta\approx 1)\), encontrarás que la ecuación se\( \cos c=\cos a\cos b+\sin a\sin b\cos C\) reduce a\( c^{2}=a^{2}+b^{2}-2ab\cos C\). Por esta razón a veces se dice que una “rotación infinitesimal” puede
ser considerado como un verdadero vector. También por esta razón, la tasa temporal de cambio de un ángulo\( \frac{d\theta}{dt} \), es decir una velocidad angular, puede tratarse con bastante seguridad como un verdadero vector, ya que el numerador y denominador de las derivadas son ambos infinitesimales.
Así, aunque el ángulo tiene dirección asociada a él, el ángulo no es un verdadero vector ya que los ángulos no siguen las reglas habituales para la adición de vectores. Sin embargo, ángulos muy pequeños sí siguen aproximadamente las reglas de adición, de manera que, en el límite infinitesimal, los ángulos pueden tratarse como vectores. Y de ahí que la velocidad angular, al ser una relación de infinitesimales (\( d\theta\)y\( dt\)), pueda tratarse correctamente como vectores.