
7.1: Sin resistencia al aire
- Page ID
- 131569

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\(\newcommand{\longvect}{\overrightarrow}\)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)Suponemos que una partícula se proyecta desde un punto O en el origen de un sistema de coordenadas, siendo el\(y\) eje -vertical y el\(x\) eje -dirigido a lo largo del suelo. La partícula se proyecta en el\(xy\) plano, con velocidad inicial\( V_{0}\) en ángulo con respecto\( \alpha\) al horizonte. En cualquier momento posterior en su movimiento es su velocidad\( V\) y el ángulo que su movimiento hace con la horizontal es\( \psi\).
La componente horizontal inicial si la velocidad es\( V_{0} \cos \alpha\), y, en ausencia de resistencia al aire, esta componente horizontal permanece constante durante todo el movimiento. También me referiré a esta constante componente horizontal de la velocidad como\( u\). Es decir,\( u=V_{0} \cos\alpha=\) constante a lo largo del movimiento.
La componente vertical inicial de la velocidad es\( V_{0} \cos \alpha\), pero la componente vertical del movimiento se desacelera a una velocidad constante\( g\). En un momento posterior durante el movimiento, la componente vertical de la velocidad es\( V_{0} \cos \psi\), a la que también me referiré como\( v\).
A continuación, escribo en la columna de la izquierda el componente horizontal de la ecuación de movimiento y la primera y segunda integrales de tiempo; en la columna derecha hago lo mismo para el componente vertical.
| Horizontal | Vertical | |
|---|---|---|
| \( \ddot{x} = 0\) | \( \ddot{y} = -g\) | \( 7.1.1 a,b\) |
| \(\dot{x}=u=V_{0}\cos\alpha\) | \( \dot{x}=u=V_{0} \cos \alpha\) | \( 7.1.2 a,b\) |
| \( \dot{x}=u=V_{0}t\cos\alpha \) | \( \dot{x}=u=V_{0}t \cos \alpha-\frac{1}{2}gt^{2} \) | \( 7.1.3 a,b\) |
Las ecuaciones\( 7.1.3a,b\) son las ecuaciones paramétricas a la trayectoria. En forma de vector, estas dos ecuaciones podrían escribirse como una sola ecuación vectorial:
\[ r = V_{0}t + \frac{1}{2}gt^{2} \tag{7.1.4}\label{eq:7.1.4} \]
Observe el signo + en el lado derecho de la Ecuación\(\ref{eq:7.1.4}\). El vector g se dirige hacia abajo.
La\(xy\) ecuación -a la trayectoria se encuentra eliminando\(t\) entre Ecuaciones\( 7.1.3a\) y\( 7.1.3b\) para producir:
\[ y = x\tan\alpha - \frac{gx^{2}}{2V_{0}^{2}cos^{2}\alpha} \tag{7.1.5}\label{eq:7.1.5} \]
Ahora, reescribe esto en el formulario
\( x^{2} - ( )x = -( )y\)
Sumar a cada lado (la mitad del coeficiente de x) 2 para “completar el cuadrado” en el lado izquierdo, y, después de algún álgebra, se encontrará que la ecuación a la trayectoria se puede escribir como:
\[(x-A)^{2} = -4a(y-B), \tag{7.1.6}\label{eq:7.1.6} \]
donde
\[ A=\frac{V^2_{0}\sin\alpha \cos\alpha}{g}=\frac{V_{0}\sin2\alpha}{2g} \tag{7.1.7}\label{eq:7.1.7} \]
\[ B=\frac{V_{0}^{2}\sin^{2}\alpha}{2g}\tag{7.1.8}\label{eq:7.1.8} \]
y
\[ a=\frac{V_{0}^{2}\cos^{2}\alpha}{2g}\tag{7.1.9}\label{eq:7.1.9} \]
Habiendo reorganizado la Ecuación\( \ref{eq:7.1.5}\) en la forma\( \ref{eq:7.1.6}\), vemos que la trayectoria es una parábola cuyo vértice está en (A, B). El rango en el plano horizontal es 2 A, o\( \frac{V_{0}^{2}\sin^{2}2\alpha}{g}\) El mayor rango en el plano horizontal se obtiene cuando\( \sin 2\alpha\) = 1, o\( \alpha\) = 45 o. El mayor rango en el plano horizontal es, por lo tanto,\( \frac{V_{0}^{2}}{g}\) La altura máxima alcanzada es B, o\( \frac{V_{0}^{2}\sin^{2}\alpha}{2g}\) La distancia entre vértice y foco es a, o\( \frac{V_{0}^{2}\cos^{2}\alpha}{2g}\) .El enfoque está por encima del suelo si esta es menor que la altura máxima, y por debajo suelo si es mayor que la altura máxima. Es decir, el foco está por encima del suelo si\( \cos^{2}\alpha < \cos^{2}\alpha\). Es decir, el foco está por encima del suelo si\( \alpha\) > 45 o y debajo del suelo si\( \alpha\) < 45 o.
El radio de curvatura\( \rho\) en cualquier lugar a lo largo de la trayectoria se puede encontrar usando la fórmula habitual\( \rho = \frac{(1 + y \prime^{2})^{\frac{3}{2}} }{y\prime\prime}\). En la parte superior de la trayectoria,\( y\prime = 0\), de manera que\( \ rho=\frac{1}{y\prime}\) Alternativamente (en caso de que uno haya olvidado o no esté familiarizado con la “fórmula habitual”), observamos que la velocidad en la parte superior de la trayectoria es igual a la componente horizontal (constante) de la velocidad\(V_{0}\cos\alpha\). Podemos entonces equiparar la aceleración\(V_{0}^{2}\cos^{2}\frac{\alpha}{\rho}\) centrípeta\( g\) y, por lo tanto, obtener:
\[ \rho=\frac{V_{0}^{2}\cos^{2}\alpha}{g}.\tag{7.1.10}\label{eq:7.1.10} \]
Al restar esto de nuestra expresión para la altura máxima del proyectil, encontramos que la altura del centro de curvatura sobre el suelo es\( \frac{V_{0}^{2}(1-3\cos^{2}\alpha)}{2g}\) El centro de curvatura está por encima del suelo si\( \alpha\) > 54 o
44'.
El rango r en un plano inclinado en ángulo\(\theta\) con la horizontal se puede encontrar sustituyendo\( x = r \cos \theta\) and \( y = r sin \theta\) en la Ecuación\( \ref{eq:7.1.5}\) a la trayectoria. Esto resulta, después de un poco de álgebra, en
\[ r=\frac{V_{0}^{2}}{gcos^{2}\theta}[\sin(2\alpha-\theta) - \sin\theta].\tag{7.1.11}\label{eq:7.1.11} \]
Esto es mayor cuando\( 2\alpha-\theta\) = 90 o; i. e. cuando el ángulo de proyección biseca el ángulo entre el plano inclinado y la vertical. El rango máximo es
\[ r=\frac{V_{0}^{2}}{g(1 + \sin\theta)}.\tag{7.1.12}\label{eq:7.1.12} \]
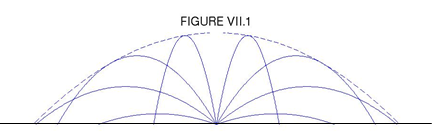
Esta es la ecuación, en coordenadas polares, de una parábola, y esta parábola, cuando gira alrededor de su eje vertical, describe un paraboloide, conocido como el paraboloide de la seguridad. Es la envolvente de todas las trayectorias posibles con una velocidad inicial\( V_{0}\). Si una pistola está disparando proyectiles con velocidad inicial\( V_{0}\), o un aspersor de césped está expulsando agua a velocidad inicial\( V_{0}\), usted está a salvo siempre y cuando esté fuera del paraboloide de seguridad. La Figura VII.1 muestra trayectorias para a = 20, 40, 60, 80, 100, 120, 140 y 160 grados, y, como línea discontinua, el paraboloide de seguridad. Observe cómo cambia el rango con a y que es mayor para a = 45 o.
Una pistola proyecta un proyectil, en ausencia de resistencia al aire, en un ángulo inicial\( \alpha\) con respecto a la horizontal. La velocidad de proyección varía con el ángulo de proyección y viene dada por
Velocidad inicial =\( V_{0}\cos\frac{1}{2}\alpha\)
Demostrar que, para lograr el mayor rango en el plano horizontal, la concha debe proyectarse en un ángulo con respecto a la horizontal cuyo coseno c viene dado por la solución de la ecuación
\( 3c^{3} + 2c^{2} -2c - 1 =0\)
Encuentra el ángulo óptimo con una precisión de un minuto de arco.