
8.1: Introducción
- Page ID
- 131055

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\(\newcommand{\longvect}{\overrightarrow}\)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)A medida que se ocupa de sus asuntos, una partícula puede experimentar muchos tipos diferentes de fuerzas. En el Capítulo 7, observamos el efecto de las fuerzas que dependen únicamente de la velocidad de la partícula. En un capítulo posterior veremos fuerzas que dependen únicamente de la posición de la partícula. (Tales fuerzas se llamarán fuerzas conservadoras.) En este capítulo veremos el efecto de las fuerzas que varían con el tiempo. Desde luego, es muy posible que una partícula desafortunada pueda ser golpeada por fuerzas que dependen de su velocidad, de su posición, y del tiempo -pero, en lo que respecta a este capítulo, estaremos mirando fuerzas que dependen sólo del tiempo.
Todo el mundo sabe que la segunda ley de movimiento de Newton establece que cuando una fuerza actúa sobre un cuerpo, el impulso del cuerpo cambia, y la tasa de cambio de impulso es igual a la fuerza aplicada. Es decir,\( F=\frac{dp}{dt}\). Si una fuerza que varía con el tiempo\( F(t)\),, actúa sobre un cuerpo por un tiempo\( T\), la integral de la fuerza a lo largo del tiempo,\( \int_{0}^{T}F(t)dt \) se llama impulso de la fuerza, y da como resultado un cambio de impulso\( \Delta P \) que es igual al impulso. Utilizaré el símbolo\( J\) para representar el impulso, o la integral de tiempo de una fuerza. Sus unidades SI serían N s, y sus dimensiones MLT -1, que es lo mismo que las dimensiones de impulso.
Así, la segunda ley del movimiento de Newton es
\[ F=\dot{p}. \nonumber \]
Cuando se integra con el tiempo, esto se convierte
\[ J=\Delta p. \nonumber \]
Asimismo, en el movimiento rotacional, el momento angular\( L\) de un cuerpo cambia cuando un par\( \tau\) actúa sobre él, de tal manera que la tasa de cambio del momento angular es igual al par aplicado:
\[ \tau = \dot{L}. \nonumber \]
Si el par, que puede variar con el tiempo, actúa a lo largo de un tiempo\( T\), la integral del par a lo largo del tiempo,\( \int_{0}^{T}\tau dt \) es el impulso angular, que denotaré por el símbolo\( K\), y da como resultado un cambio del momento angular:
\[ K =\Delta L. \nonumber \]
Las unidades SI de impulso angular son N m s, y las dimensiones son ML 2 T -1, que son las mismas que las del momento angular.
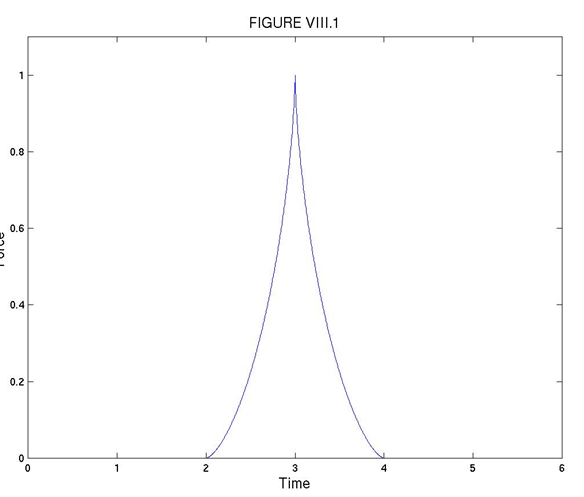
Por ejemplo, supongamos que una pelota de golf es golpeada por una fuerza varía con el tiempo como
\[ F = \hat{F}\left[1-\left(\frac{|t-t_{0}|}{\tau}\right)^{\frac{2}{3}}\right]^{\frac{3}{2}} \nonumber \]
Esto puede parecer una función altamente artificial e improbable, pero en la Figura VIII.1 la he dibujado para\( \hat{F}=1\)\( t_{0}=3\),\( \tau=1\) y verán que es una función razonablemente plausible. El club está en contacto con el balón de vez en cuando\( t_{0}-\tau\)\( t_{0}+\tau\).
Si el balón, de masa\( m\), parte del descanso, ¿cuál será su velocidad\( V\) inmediatamente después de que abandone el palo? La respuesta es que su nuevo impulso,\( mV\), igualará el impulso (o la integral de tiempo) de la fuerza anterior:
\[ mV = \hat{F}\int_{t_{0}-\tau}^{t_{0}+\tau}\left[1-\left(\frac{|t-t_{0}|}{\tau}\right)^{\frac{2}{3}}\right]^{\frac{3}{2}}dt. \nonumber \]
Esto es muy fácil de entender; si hay alguna dificultad podría estar en la mecánica de elaborar esta integral. Es una buena práctica de integración, pero, si no puedes hacerlo después de un esfuerzo razonable, y quieres una pista, pregúntame (jtatum@uvic.ca) y ya veré qué puedo hacer. Deberías obtener
\[ mV = \frac{3\pi}{16}\hat{F}\tau =0.589\hat{F}\tau \nonumber \]
Aquí hay un ejemplo muy similar, excepto que la integración es bastante más fácil. Una bola de masa 500 g, inicialmente en reposo, es golpeada con una fuerza que varía con el tiempo como
\(F = \hat{F}\left[1-\left(\frac{t-t_{0}}{\tau}\right)^{2}\right]^{\frac{1}{2}}\),
donde\( \hat{F}\) = 4000N,\( t_{0}\) = 10 ms,\( t\) = 3 ms. Dibuja (con precisión, por computadora) una gráfica de\( F\) versus tiempo (no se parece del todo a la Figura VIII.1). ¿Qué tan rápido se mueve la pelota inmediatamente después del impacto?
(Lo hago 37.7 m s -1.)