
3.5: Los vectores de velocidad y aceleración
- Page ID
- 126668

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)Objetivos de aprendizaje
- Explicar el vector de velocidad y el vector de aceleración
El vector de velocidad
En un curso de primer año en mecánica newtoniana, definiríamos un vector como algo que tiene tres componentes. Además, requeriríamos que se transforme de cierta manera bajo una rotación. Por ejemplo, podríamos formar la colección de números\((e,\: T,\: DJIA)\), donde\(e\) está la carga fundamental,\(T\) es la temperatura en Buffalo, Nueva York, y\(DJIA\) mide cómo le va al mercado de valores. Pero esto no sería un vector, ya que no actúa de la manera correcta cuando se gira (este “vector” en particular es invariante bajo rotaciones). La figura\(\PageIndex{1}\) da un no-ejemplo menos tonto. A diferencia de un vector, un escalar se especifica por un solo número real y es invariante bajo rotaciones.

El ejemplo más básico de un vector newtoniano fue un desplazamiento\((∆x, ∆y, ∆z)\), y a partir del vector de desplazamiento pasaríamos a construir otras cantidades como un vector de velocidad\(v = ∆r/∆t\). Esto funcionó porque en la mecánica newtoniana\(∆t\) se trató como un escalar, y dividir un vector por un escalar produce algo que nuevamente se transforma de la manera correcta para ser un vector.
Ahora actuemos a la relatividad, y trabajemos a través de los mismos pasos por analogía. Cuando digo “vector” en este libro, me refiero a algo que en\(3+1\) dimensiones tiene cuatro componentes. Esto también se puede denominar cuatro vectores. Nuestro único ejemplo hasta ahora ha sido el vector de desplazamiento espacio-tiempo\(∆r = (∆t, ∆x, ∆y, ∆z)\). Este vector se transforma de acuerdo con la transformación de Lorentz. En general, requerimos como parte de la definición de un vector (cuatro-) que se transforme de la manera habitual tanto bajo rotaciones como potenciadores (transformaciones de Lorentz). Ahora podríamos imaginar que el siguiente paso debería ser construir un cuatro vector de velocidad\(∆r/∆t\). Pero relativisticamente, la cantidad no se\(∆r/∆t\) transformaría como un vector, por ejemplo, si\(r\) fuera espacial, entonces habría un marco en el que teníamos\(∆t = 0\), y entonces\(∆r/∆t\) sería finito en algunos fotogramas pero infinito en otros, lo cual es absurdo.
Para construir un vector válido, tenemos que dividirlo\(∆r\) por un escalar. El único escalar que podría ser relevante sería el momento adecuado\(\Delta \tau\), y así es como se define el vector de velocidad en la relatividad. Para una línea mundial inercial (una con velocidad constante), definimos\(v = ∆r/∆\tau\). La generalización a las líneas mundiales no inerciales requiere que hagamos de esta definición una derivada:
\[v = \dfrac{dr}{d\tau}\]
No todos los objetos tienen vectores de velocidad bien definidos. Por ejemplo, consideremos un rayo de luz con una línea recta mundial, de manera que la derivada\(d. . . / d. . . \) sea la misma que la relación de diferencias finitas\(∆ . . . /∆ . . .\), es decir, no se necesita cálculo. Un rayo de luz tiene\(v = c\), por lo que aplicar la métrica a cualquier segmento de su línea mundial da\(∆\tau = 0\). Intentar calcular\(v = ∆r/∆\tau \) luego da algo con infinitos componentes. Veremos en la sección 4.3 que todas las partículas sin masa, no sólo los fotones, viajan a\(c\), por lo que lo mismo se aplicaría a ellas. Por lo tanto, un vector de velocidad solo se define para partículas cuyas líneas mundiales son similares al tiempo, es decir, partículas masivas.
Ejemplo\(\PageIndex{1}\): Velocity vector of an object at rest
Un objeto en reposo tiene\(v = (1, 0)\). El primer componente indica que si fijamos un reloj al objeto con cinta adhesiva, el tiempo adecuado medido por el reloj no sufre dilatación de tiempo según un observador en este fotograma,\(dt/ d\tau = 1\). El segundo componente nos dice que la posición del objeto no está cambiando,\[dx/ dτ = 0\]
El vector de aceleración
El vector de aceleración se define como la derivada del vector de velocidad con respecto al tiempo apropiado,
\[a = dv /d\tau.\]
Mide la curvatura de una línea mundial. Su magnitud cuadrada es la menos el cuadrado de la aceleración adecuada, es decir, la aceleración que sería medida por un acelerómetro llevado a lo largo de esa línea mundial. La aceleración adecuada es solo aproximadamente igual a la magnitud del trivector de aceleración newtoniana, en el límite de velocidades pequeñas.
Ejemplo\(\PageIndex{2}\): Constant proper acceleration
Supongamos que una nave espacial se mueve para que la aceleración sea juzgada como el valor constante a por un observador a bordo. Encuentra el movimiento\(x(t)\) medido por un observador en un marco inercial.
Solución
Dejar\(τ\) reposar el tiempo adecuado del barco, y dejar que los puntos indiquen derivados con respecto a\(τ\). La velocidad de la nave tiene magnitud\(1\), entonces
\[\dot{t}^2 - \dot{x}^2 = 1 \nonumber\]
Un observador que esté instantáneamente en reposo con respecto a los jueces de la nave debe tener un vector de aceleración\((0, a)\) (porque se aplica el límite de baja velocidad). El observador en el\((t, x)\) marco coincide en la magnitud de este vector, por lo que
\[\ddot{t}^2 - \ddot{x}^2 = -a^2 \nonumber\]
La solución de estas ecuaciones diferenciales es
\[t = \dfrac{1}{a} \sinh aτ \nonumber\]
y
\[x = \dfrac{1}{a} \cosh aτ \nonumber\]
(elegir constantes de integración para que las expresiones tomen sus formas más simples). Eliminando\(τ\) da
\[x = \frac{1}{a}\sqrt{1 + a^2 t^2} \nonumber\]
se muestra en la figura\(\PageIndex{2}\). La línea mundial es una hipérbola, y este tipo de movimiento a veces se conoce como movimiento hiperbólico.
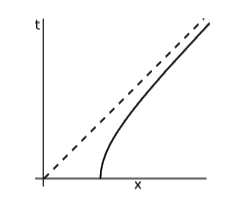
Al\(t\) acercarse al infinito,\(dx/dt\) se acerca a la velocidad de la luz. En el mismo límite,\(x\) aumenta exponencialmente con el tiempo adecuado, de manera que en teoría se pueden recorrer distancias sorprendentemente grandes dentro de una vida humana.
Otra característica interesante de este problema es la asíntota de línea discontinua, que es parecida a la luz. Supongamos que interpretamos esto como la línea mundial de un rayo de luz. El rayo se acerca cada vez más al barco, pero nunca alcanzará del todo. Así, siempre que el cohete nunca deje de acelerar, toda la región del espacio-tiempo a la izquierda de la línea discontinua queda siempre oculta a sus pasajeros. Es decir, una observadora que sufre una aceleración constante tiene un horizonte de eventos —un límite que le impide observar cualquier cosa del otro lado. Es posible que hayas escuchado sobre el horizonte de eventos asociado a un agujero negro. Este ejemplo muestra que podemos tener horizontes de eventos incluso cuando no hay gravedad en absoluto.
Restricciones en los vectores de velocidad y aceleración
Contando grados de libertad
Hay algo engañoso en el tratamiento anterior de los vectores de velocidad y aceleración, y la forma más fácil de verlo es introduciendo la idea de un grado de libertad. A menudo podemos describir un sistema usando una lista de números reales. Para la manecilla en un reloj, solo necesitamos un número, como\(3\) en punto. Esto se debe a que la manecilla está obligada a permanecer en el plano de la esfera del reloj y también a mantener su cola en el centro del círculo. Ya que un número describe su posición, decimos que tiene un grado de libertad. Si un excursionista quiere saber dónde se encuentra en un mapa, tiene dos grados de libertad, lo que podría especificarse como su latitud y longitud. Si estuviera en un helicóptero, no habría restricción alguna para permanecer en la superficie terrestre, y el número de grados de libertad aumentaría a tres. Si también consideramos la velocidad del helicóptero como parte de la descripción de su estado, entonces habría un total de seis grados de libertad: uno por cada coordenada y otro por cada componente del vector de velocidad.
Ahora supongamos que queremos especificar la velocidad y aceleración de una partícula. En la mecánica newtoniana, describiríamos estos tres vectores como que poseen un total de seis grados de libertad:\(vx, vy, vz, ax, ay\), y\(az\). Pasar de la mecánica newtoniana a la relatividad no puede cambiar el número de grados de libertad. Por ejemplo, la aceleración de un electrón está completamente determinada por la fuerza que ejercemos sobre él, y podríamos controlar esa aceleración colocando un protón cerca y produciendo una atracción eléctrica. La posición del protón (tres grados de libertad para sus tres coordenadas) determina la aceleración del electrón, por lo que la aceleración también tiene exactamente tres grados de libertad.
Esto significa que debe haber cierta redundancia oculta en los ocho componentes de los cuatro vectores de velocidad y aceleración. El sistema sólo tiene seis grados de libertad, por lo que debe haber dos limitaciones que desconocíamos. De igual manera, he ido de excursión y mi unidad GPS me aseguró que estaba a mil pies sobre un lago o tres mil pies bajo una montaña. En esas situaciones había una restricción que yo conocía pero que el GPS no lo hacía: que estaba en la superficie de la tierra.
Normalización de la velocidad
La primera restricción surge naturalmente de una interpretación geométrica del cuatro vector de velocidad, mostrado en la Figura\(\PageIndex{3}\). La curva representa la línea mundial de una partícula. La línea discontinua se dibuja tangente a la línea mundial en un momento determinado. Bajo un microscopio, la línea discontinua, que representa un posible movimiento inercial de una partícula, es indistinguible de la curva sólida, que es no inercial. La línea discontinua tiene una pendiente\(∆t/∆x = 2\), que corresponde a una velocidad\(∆x/∆t = 1/2\). La figura se dibuja en\(1 + 1\) dimensiones, pero en\(3 + 1\) dimensiones nos gustaría saber más que este número. Queríamos conocer la orientación de la línea discontinua en las tres dimensiones espaciales, es decir, no solo la velocidad de la partícula sino también su dirección de movimiento. Toda la información deseada se puede encapsular en un vector. Ambos vectores mostrados en la figura son paralelos a la línea discontinua, por lo que a pesar de que tienen diferentes longitudes, no hay diferencia entre las velocidades que representan. Como queremos que la partícula tenga un solo vector bien definido para representar su velocidad, queremos elegir un vector de entre todos los vectores paralelos a la línea discontinua, y llamarlo “el” vector de velocidad.

Ya hemos hecho implícitamente esta elección. De la definición original se deduce\(v = dr/ dτ\) que la magnitud cuadrada del vector de velocidad\(v^2 = v\cdot v\) es siempre igual a\(1\), aunque el objeto cuyo movimiento describe no se mueve a la velocidad de la luz. Esto, junto con el requisito de que el vector de velocidad se encuentre dentro del futuro en lugar del cono de luz pasado, especifica de manera única qué vector tangente queremos. El requisito\(v^2 = 1\) es un ejemplo de una idea recurrente en física y matemática llamada normalización. La idea es que tengamos algún objeto (un vector, una función,.) que podría escalarse hacia arriba o hacia abajo en cualquier cantidad, pero de entre todas las escalas posibles, sólo hay uno que es el correcto. Por ejemplo, un jugador podría colocar la oportunidad de un caballo de ganar en\(9\) to\(1\), pero un físico los dividiría para normalizar las probabilidades a\(0.9\) y\(0.1\), siendo la idea que la probabilidad total debería sumar\(1\).\(10\) Nuestra definición del vector de velocidad implica que está normalizado. Así, una alternativa, definición geométrica del vector de velocidad habría sido que es el vector que es tangente a la línea mundial de la partícula, dirigido al futuro y normalizado a\(1\).
Cuando escuchamos algo que se conoce como un “vector”, solemos tomar esta es una afirmación de que no solo transforma como vector, sino que además agrega como vector. Pero la suma de dos vectores de velocidad normalmente no sería un vector de velocidad válido en absoluto, ya que no tendría magnitud unitaria. Esta falta de aditividad se habría esperado en todo caso porque las velocidades no se suman linealmente en la relatividad (sección 3.3).
Ejercicio\(\PageIndex{1}\)
Se requiere que los vectores de velocidad tengan\(v^2 = 1\). Si un vector califica como un vector de velocidad válido en algún fotograma, ¿podría ser inválido en otro fotograma?
Una buena manera de pensar acerca de los vectores de velocidad es que cada vector representa un observador potencial. Es decir, los vectores de velocidad son los observador-vectores\(o\) del capítulo 1, pero con un requisito de normalización\(o^2 = 1\) que no impusimos antes. Un observador escribe su propio vector de velocidad como\((1, 0)\), es decir, como el vector unitario en la dirección temporal. Como no tenemos noción de agregar un observador a otro observador, tiene sentido que los vectores de velocidad no agreguen relativisticamente. Del mismo modo, no existe una manera significativa de definir la magnitud de un observador, por lo que tiene sentido que la magnitud de un vector de velocidad no lleve información útil y pueda establecerse arbitrariamente igual a 1.
En cuanto a la magnitud, tenga en cuenta también que la magnitud de un vector es invariante de fotograma, y por lo tanto no tendría sentido imaginar que la magnitud de las cuatro velocidades de un objeto produciría algún número diciéndole qué tan rápido iba el objeto. ¿Qué tan rápido en relación con qué?
Si\(u\) y\(v\) son ambos vectores de velocidad dirigidos al futuro, debidamente normalizados, y si la firma es\(+ - --\) como en este libro, entonces su producto interno es\(\gamma = u\cdot v\), el factor gamma, introducido en la sección 1.3, correspondiente a su velocidad relativa.
Ortogonalidad de la velocidad y aceleración
Ahora para la segunda de las dos limitaciones deducidas anteriormente:
Supongamos que un observador afirma que en un momento determinado en el tiempo, una partícula tiene\(v = (1, 0)\) y\(a = (3, 0)\). Es decir, la partícula está en reposo\((v_x = 0)\) y su\(v_t\) está creciendo por\(3\) unidades por segundo. Esto es imposible, porque después de un intervalo de tiempo infinitesimal\(dt\), resultará en esta tasa de cambio\(v = (1 + 3 dt, 0)\), que no se normaliza adecuadamente: su magnitud ha crecido de\(1\) a\(1+3 dt\). El observador se equivoca. Esta no es una combinación posible de vectores de velocidad y aceleración. En general, siempre tenemos la siguiente restricción en los vectores de velocidad y aceleración:
\[a\cdot v = 0\]
Esto es análogo a la idea tridimensional de que en movimiento circular uniforme, la perpendicularidad de los tres vectores de velocidad y aceleración es lo que provoca que el vector de velocidad gire sin cambiar su magnitud.