
10.2: Integradores
- Page ID
- 87750

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\(\newcommand{\longvect}{\overrightarrow}\)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)El funcionamiento básico de un integrador se muestra en la Figura\(\PageIndex{1}\). El voltaje de salida es el resultado de la integral definida\(V_{in}\) de tiempo = 0 a algún tiempo arbitrario\(t\). A esto se sumará una constante que representa la salida de la red en\(t = 0\). Recuerde, la integración es básicamente el proceso de suma. También se puede pensar en esto como encontrar el “área bajo la curva”. La salida de este circuito siempre representa la suma total de los valores de entrada hasta ese preciso instante en el tiempo. En consecuencia, si se usa un valor estático (distinto de cero) como entrada, la salida crecerá continuamente con el tiempo. Si este crecimiento continúa sin marcar, se producirá la saturación de salida. Si la cantidad de entrada cambia de polaridad, la salida también puede cambiar de polaridad. Habiendo establecido el funcionamiento básico del circuito, nos quedamos con la realización del diseño y las limitaciones a elaborar.
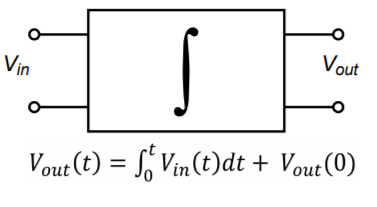
Figura\(\PageIndex{1}\): Un integrador básico.
Como se señaló en trabajos anteriores, la respuesta de un circuito de amplificador operacional con retroalimentación reflejará las características de los elementos de retroalimentación. Si se utilizan elementos lineales, la respuesta resultante será lineal. Si se usa un dispositivo logarítmico en el bucle de retroalimentación, la respuesta resultante tendrá un carácter log o anti-log. Para lograr la integración, entonces, la red de retroalimentación requiere el uso de un elemento que exhiba esta característica. En otras palabras, la corriente a través del dispositivo debe ser proporcional ya sea a la integral o diferencial de la tensión a través del mismo. Los inductores y capacitores responden a estos requisitos, respectivamente. Debería ser posible entonces, crear un integrador con un inductor o un condensador. Los capacitores tienden a comportarse de una manera más ideal que los inductores. Los condensadores prácticamente no presentan problemas con la interferencia de campo magnético parásito, no tienen las limitaciones de saturación de los inductores, son relativamente económicos de fabricar y funcionan de manera confiable en un amplio rango de frecuencias. Debido a estos factores, la gran mayoría de los integradores se fabrican utilizando condensadores en lugar de inductores. La ecuación característica para un condensador es
\[i(t)=C \frac{dv(t)}{dt} \label{10.1} \]
Esto nos dice que la corriente que carga el condensador es proporcional al diferencial de la tensión de entrada. Al integrar la Ecuación\ ref {10.1}, se puede ver que la integral de la corriente del condensador es proporcional al voltaje del condensador.
\[v(t)= \frac{1}{C}\int_{0}^{t} i(t) dt \label{10.2} \]
Supongamos por un momento que el voltaje del condensador es el voltaje de salida deseado, como en la Figura\(\PageIndex{2}\). Si la corriente del condensador se puede derivar del voltaje de entrada, el voltaje de salida será proporcional a la integral de la entrada. El circuito de Figura\(\PageIndex{3}\) satisfará nuestros requerimientos. Tenga en cuenta que se basa en el amplificador de inversión paralelo-paralelo estudiado anteriormente. Sigue la derivación de su Ecuación característica.
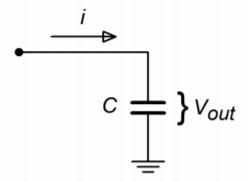
Figura\(\PageIndex{2}\): Capacitor como elemento de integración.
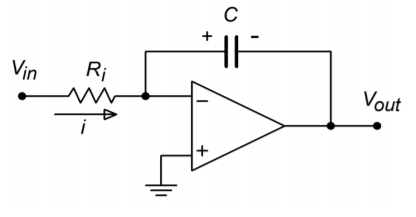
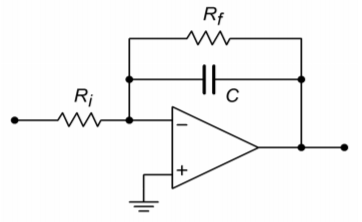
Figura\(\PageIndex{3}\): Un simple integrador de amplificador operacional.
Primero, tenga en cuenta que el voltaje a través del condensador es igual al voltaje de salida. Esto se debe a la conexión a tierra virtual en el terminal de amplificador operacional inversor. Dadas las polaridades marcadas, el voltaje del condensador es de polaridad opuesta.
\[V_{out}(t)=−V_c (t) \label{10.3} \]
Debido al terreno virtual en la entrada inversora del amplificador operacional, todo\(V_in\) cae a través\(R_i\). Esto crea la corriente de entrada,\(i\).
\[i(t)= \frac{V_{in} (t)}{R_i} \label{10.4} \]
Debido a que la corriente extraída por las entradas del amplificador operacional es insignificante, toda la corriente de entrada fluye hacia el condensador,\(C\). Combinando ecuaciones\ ref {10.2} y\ ref {10.4} rendimientos
\[V_c (t)= \frac{1}{C} \int \frac{V_{in} (t)}{R_i} dt \\ V_c (t)= \frac{1}{R_i C} \int V_{in} (t)dt \label{10.5} \]
Combinando la Ecuación\ ref {10.5} con la Ecuación\ ref {10.3} produce la Ecuación característica para el circuito.
\[V_{out} (t)=− \frac{1}{R_i C} \int V_{in} (t) dt \label{10.6} \]
Obsérvese que esta Ecuación supone que el circuito está inicialmente relajado (es decir, no hay carga en el condensador en el tiempo = 0). La única diferencia entre la Ecuación\ ref {10.6} y la Ecuación general tal como se presenta en la Figura\(\PageIndex{1}\) es la constante anterior\(−1/R_iC\). Si la inversión o magnitud de esta constante crea problemas de diseño, generalmente se puede corregir mediante redes de ganancia/atenuación y/o búferes invertidos. Por último, cabe señalar que debido a la tierra virtual en la entrada inversora, la impedancia de entrada de este circuito es aproximadamente igual a\(R_i\), como es el caso del amplificador inversor paralelo ordinario.
10.2.1: Precisión y utilidad de la integración
Siempre y cuando la operación del circuito siga el modelo presentado anteriormente, la precisión de la Ecuación\ ref {10.6} es muy alta. Se producen pequeños errores debido a las aproximaciones realizadas. Una fuente posible es la corriente de polarización de entrada del amplificador operacional. Si la corriente de la señal de entrada es relativamente baja, la idealización de que toda la corriente de entrada desviará el amplificador operacional y fluirá directamente al condensador ya no es realista. Una posible solución es usar un amplificador operacional de entrada FET. La respuesta de frecuencia limitada y las características de ruido del amplificador operacional también jugarán un papel en la máxima precisión del circuito. Generalmente, el rendimiento de la tasa de respuesta no es primordial, ya que los integradores tienden a “suavizar” las variaciones de la señal. Siempre que la señal de entrada permanezca dentro de los límites de frecuencia del amplificador operacional, muy por encima del piso de ruido, y la salida no se satura, resultados de integración precisos.
Los circuitos de este tipo pueden ser utilizados para modelar cualquier número de procesos físicos. Por ejemplo, la tensión térmica en un transductor dado podría encontrarse integrando la señal a través de él. La señal resultante podría entonces compararse con un máximo predeterminado. Si la temperatura resultó ser demasiado alta, el circuito podría apagarse como medida de seguridad. Aunque la reacción inicial podría ser medir directamente la temperatura con alguna forma de sensor térmico, esto no siempre es práctico. En tal caso, la simulación del proceso físico es la única ruta razonable.
10.2.2: Optimización del Integrador
Para un mejor rendimiento, las piezas de alta calidad son una necesidad. Se necesitan amplificadores operacionales de baja desviación y deriva, ya que los pequeños valores de CC que producen en la entrada eventualmente obligarán al circuito a saturarse. Aunque no se muestran en la Figura\(\PageIndex{3}\), generalmente se requieren adiciones de compensación de sesgo y compensación de compensación.
Se pueden usar dispositivos de compensación muy baja, como amplificadores operativos estabilizados por interruptor (o conmutación de cero automático) para aplicaciones de menor frecuencia. Para obtener la máxima precisión, se desea una pequeña corriente de polarización de entrada y, por lo tanto, se deben considerar los amplificadores operacionales de entrada FET. Además, el condensador debe ser de tipo estable y de baja fuga, como la película de polipropileno. Los capacitores electrolíticos son generalmente una mala elección para estos circuitos.
Incluso con piezas de alta calidad, el integrador básico aún puede resultar susceptible a errores causados por pequeñas compensaciones de CC. El desplazamiento de entrada hará que la salida se mueva gradualmente hacia la saturación positiva o negativa. Cuando esto sucede, la señal de salida se distorsiona, y por lo tanto, inútil. Para evitar esto es posible colocar un interruptor de cortocircuito a través del condensador. Esto se puede utilizar para reinicializar el circuito de vez en cuando. Aunque esto sí funciona, apenas es conveniente. Antes de que podamos llegar a una cura más efectiva, primero debemos examinar la causa del problema.
Podemos considerar que el circuito de la Figura\(\PageIndex{3}\) es un amplificador de inversión simple, donde\(R_f\) se sustituye por la reactancia del condensador,\(X_C\). En este caso, podemos ver que la magnitud de la ganancia de voltaje es
\[A_v=− \frac{X_C}{R_i} =− \frac{1}{2\pi f C R_i} \nonumber \]
Debido a\(X_C\) que depende de la frecuencia, se deduce que la ganancia de voltaje debe ser dependiente de la frecuencia. Debido a que\(X_C\) aumenta a medida que baja la frecuencia, la ganancia de voltaje debe aumentar a medida que disminuye la frecuencia. Para ser más específicos, la curva de ganancia seguirá una pendiente de −6 dB por octava. Eventualmente, la respuesta del amplificador alcanza la respuesta de bucle abierto. Esto se muestra en la Figura\(\PageIndex{4}\).
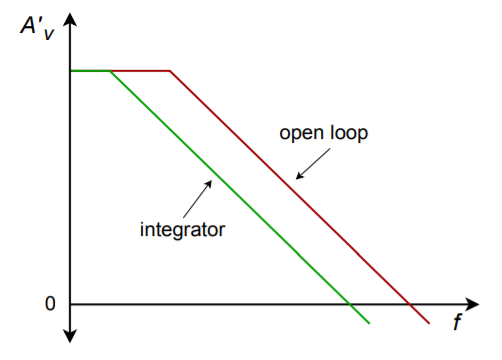
Figura\(\PageIndex{4}\): Respuesta de un integrador simple.
Figura\(\PageIndex{5}\): Un integrador práctico.
La ganancia de CC del sistema está en el nivel de bucle abierto, por lo que es obvio que incluso las entradas de CC muy pequeñas pueden causar estragos con la respuesta del circuito. Si la ganancia de baja frecuencia se limita a un nivel más modesto, los problemas de saturación pueden reducirse, si no se eliminan por completo. La limitación de ganancia se puede producir derivando el condensador de integración con una resistencia, como se muestra en la Figura\(\PageIndex{5}\). Esta resistencia establece la ganancia de voltaje límite superior en
\[A_{max}=− \frac{R_f}{R_i} \nonumber \]
Como siempre, habrá un trade-off con la modificación. Por definición, la integración ocurre donde la respuesta de amplitud se balancea a -6 dB por octava, ya que esta es la respuesta de nuestro modelo idealizado de condensadores. Cualquier alteración en la curva de respuesta impactará en la máxima precisión de la integración. Al limitar la ganancia de baja frecuencia, la respuesta de amplitud Bode ya no mantendrá un rolloff constante de −6 dB por octava. En cambio, la respuesta se aplanará por debajo de la frecuencia crítica establecida por\(C\) y\(R_f\), como se muestra en la Figura\(\PageIndex{6}\). Esta frecuencia crítica,\(f_{low}\), se encuentra de la manera estándar,
\[f_{low} = \frac{1}{2\pi R_f C} \label{10.7} \]
Esta es una frecuencia muy importante. Nos dice dónde comienza el rango de integración útil. Si la frecuencia de entrada es menor que\(f_{low}\), el circuito actúa como un amplificador de inversión simple y no resulta integración. La frecuencia de entrada debe ser mayor que\(f_{low}\) para que se produzca una integración útil. La pregunta entonces, ¿cuánto más alto? Algunas reglas generales son útiles. Primero, si la frecuencia de entrada es igual\(f_{low}\), el cálculo resultante solo será de aproximadamente 50% de precisión 1. Esto significa que existirán cambios significativos de amplitud y fase de la señal en relación con el ideal. En segundo lugar, aproximadamente 10 veces\(f_{low}\), la precisión es de aproximadamente el 99%. En este punto, el acuerdo entre los valores medidos calculados y reales será bastante sólido.
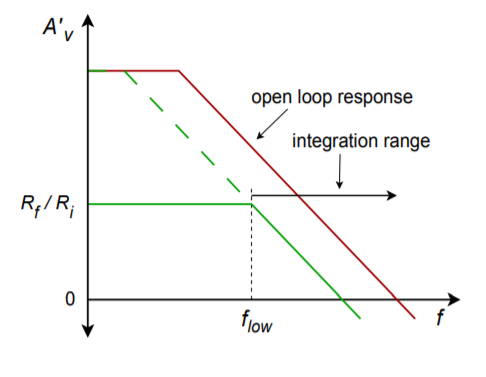
Figura\(\PageIndex{6}\): Respuesta de un integrador práctico.
Ejemplo\(\PageIndex{1}\)
Determinar la Ecuación para\(V_{out}\), y el límite de frecuencia inferior de integración para el circuito de la Figura\(\PageIndex{7}\).
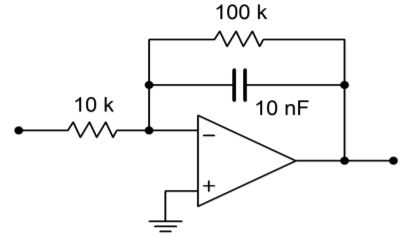
Figura\(\PageIndex{7}\): Integrador por ejemplo\(\PageIndex{1}\).
La forma general de la Ecuación de salida viene dada por la Ecuación\ ref {10.6}.
\[V_{out}(t)=− \frac{1}{R_iC} \int V_{in} (t) dt \\ V_{out}(t)=− \frac{1}{10 \text{ k}\times 10 \text{ nF}}\int V_{in} (t) dt \\ V_{out}(t)=−10^4\int V_{in} (t) dt \nonumber \]
El límite inferior de integración lo establece\(f_{low}\).
\[f_{low} = \frac{1}{2\pi R_f C} \\ f_{low} = \frac{1}{2 \pi 100 \text{ k}\times 10 \text{ nF}} \\ f_{low} =159 \text{ Hz} \nonumber \]
Esto representa nuestro punto de precisión del 50%. Para una precisión del 99%, la frecuencia de entrada debe ser al menos una década por encima\(f_{low}\), o 1.59 kHz. La integración precisa continuará a frecuencias cada vez más altas.
El límite superior para la integración útil se establece por dos factores: la respuesta de frecuencia del amplificador operacional y la amplitud de la señal frente al ruido. Obviamente, a frecuencias mucho más altas, los supuestos básicos del funcionamiento del circuito dejarán de ser válidos. El uso de amplificadores operacionales de ancho de banda ancha reduce esta limitación pero no puede eliminarla. Todos los amplificadores eventualmente alcanzarán un límite de frecuencia superior. Quizás no sea tan obvia la limitación causada por la intensidad de la señal. Como se señaló anteriormente, la respuesta del integrador progresa a −6 dB por octava, lo que equivale a −20 dB por década. En otras palabras, un aumento de diez veces en la frecuencia de entrada da como resultado una reducción de diez veces en la amplitud de salida. Para frecuencias más altas, la atenuación neta puede ser muy grande. En este punto, la señal de salida corre el riesgo de perderse en el ruido de salida. La única manera de evitar esto es asegurarse de que el amplificador operacional sea un tipo de bajo ruido, particularmente si se utilizará una amplia gama de frecuencias de entrada. Para la integración en una banda estrecha de frecuencias, la constante de integración RC puede optimizarse para evitar pérdidas excesivas.
Ahora que hemos examinado la estructura básica del integrador práctico, es el momento de analizar su respuesta a diferentes formas de onda de entrada. Existen dos formas básicas de calcular la salida: tiempo-continuo o tiempo-discreto. El método de tiempo continuo implica el uso de la integral indefinida, y es muy adecuado para entradas sinusoidales simples. Las formas de onda que requieren una representación en el dominio del tiempo más compleja, como una onda cuadrada, pueden analizarse con el método discreto de tiempo. Esto corresponde a la integral definitiva.
10.2.3: Análisis de Integradores con el Método Tiempo-Continuo
El enfoque de análisis de tiempo continuo implica encontrar una representación en el dominio del tiempo de la forma de onda de entrada y luego insertarla en la Ecuación\ ref {10.6}. Se toma la integral indefinida, y el resultado es la representación en el dominio del tiempo de la forma de onda de salida. Se ignora el término constante producido por la integral indefinida. Siempre que la forma de onda de entrada pueda escribirse en una forma de dominio de tiempo, se puede usar este método. Si bien cualquier forma de onda puede expresarse de esta manera, no siempre es práctica ni la ruta más conveniente. De hecho, las formas de onda relativamente comunes como las ondas cuadradas y las ondas triangulares requieren una representación en el dominio del tiempo en serie infinita. No vamos a tratar con estas formas de onda de esta manera. La integración tiempo-continua de estas funciones se deja como un ejercicio en el Desafío Problemas al final de este capítulo.
Ejemplo\(\PageIndex{2}\)
Usando el circuito de la Figura\(\PageIndex{7}\), determine la salida si la entrada es una onda sinusoidal de pico de 1 V a 5 kHz. Primero, escribe la señal de entrada como función de tiempo.
\[V_{in} (t)=1 \sin 2 \pi 5000t \nonumber \]
Sustituya esta entrada en la Ecuación\ ref {10.6}:
\[V_{out}(t) = − \frac{1}{R_iC} \int V_{in} (t) dt \\ V_{out}(t) = − \frac{1}{10 \text{ k}\times 10 \text{ nF}} \int 1 \sin 2 \pi 5000t dt \\ V_{out}(t) = −10^4 \int 1 \sin 2 \pi 5000t dt \\ V_{out}(t) = -10^{4} \frac{1}{2 \pi 5000t} \int 2 \pi 5000t \sin 2 \pi 5000t dt \\ V_{out}(t) = -0.318 (- \cos 2 \pi 5000 t) \\ V_{out}(t) = 0.318 \cos 2 \pi 5000 t \nonumber \]
Así, la salida es una onda sinusoidal que está liderando la entrada por 90\(^{\circ}\) y es de pico de 0.318 V. Nuevamente, señalar que se ignora la constante producida por la integración. En el Ejemplo 1 se señaló que\(f_{low}\) para este circuito es de 159 Hz. Debido a que la frecuencia de entrada es superior a 10 veces\(f_{low}\), la precisión del resultado debería ser mejor que 99%. Tenga en cuenta que si se cambia la frecuencia de entrada, tanto la frecuencia de salida como la amplitud cambian. Por ejemplo, si la entrada se elevara en un factor de 10 a 50 kHz, la salida también estaría a 50 kHz, y la amplitud de salida se reduciría en un factor de 10, a 31.8 mV. Sin embargo, la salida seguiría siendo un coseno.
Simulación por Computadora
La figura\(\PageIndex{8}\) muestra la simulación Multisim del circuito de Ejemplo\(\PageIndex{2}\). La respuesta en estado estacionario se grafica en la Figura\(\PageIndex{8b}\)..
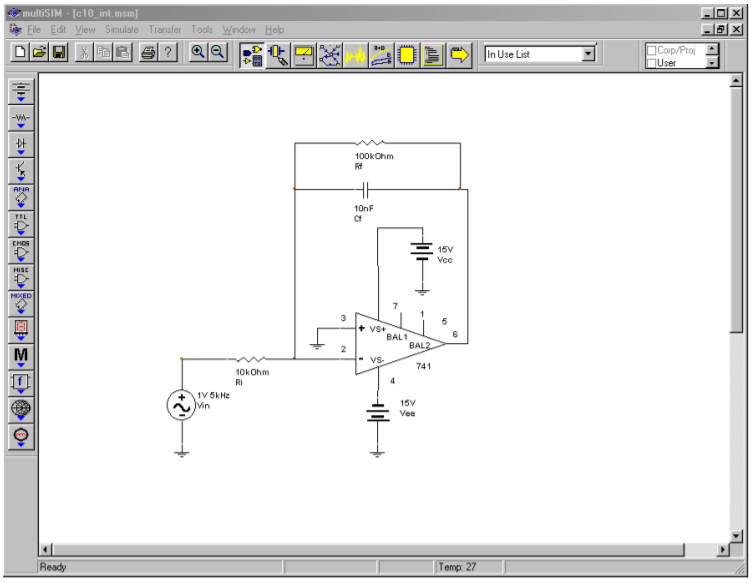
Figura\(\PageIndex{8a}\): Integrador en Multisim.
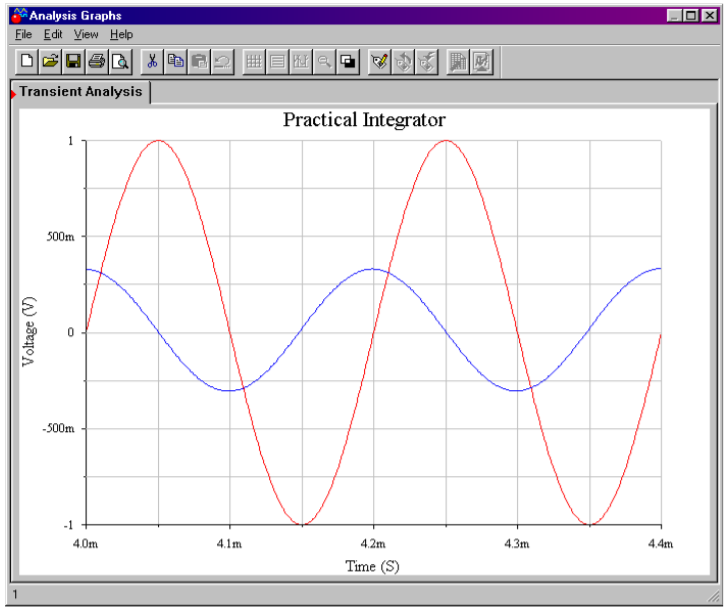
Figura\(\PageIndex{8b}\): Formas de onda de entrada y salida del integrador.
Tenga en cuenta que para lograr resultados en estado estacionario, la salida se traza solo después de que hayan pasado varios ciclos de la entrada. Incluso después de unos 20 ciclos, la salida no es perfectamente simétrica. A pesar de esto, la precisión tanto de la amplitud como de la fase es bastante buena cuando se compara con los resultados calculados. Esto refuerza aún más el hecho de que el circuito está operando dentro de su rango útil. También puede ser instructivo volver a ejecutar la simulación para investigar la respuesta inicial.
10.2.4: Análisis de Integradores con el Método Tiempo-Discreto
A diferencia del enfoque tiempo-continuo, este método utiliza la integral definida y se utiliza para encontrar un nivel de salida en instancias específicas en el tiempo. Esto es útil si la representación continua en el dominio del tiempo es algo compleja y, sin embargo, la forma de onda es relativamente simple, como ocurre con una onda cuadrada. A menudo, se puede usar un poco de lógica para determinar la forma de la onda resultante. Luego se utiliza la integral para determinar la amplitud exacta. El método discreto de tiempo también resulta útil para ondas más complejas cuando se modela dentro de un programa de computadora. Aquí, se pueden realizar varios cálculos por ciclo, con los resultados unidos gráficamente para formar la señal de salida.
La técnica básica gira en torno a la búsqueda de representaciones simples en el dominio del tiempo de la entrada para períodos específicos de tiempo. Una onda dada podría modelarse como dos o más secciones. Luego se aplica la integral definida sobre cada sección y se unen los resultados.
Ejemplo\(\PageIndex{3}\)
Esboce la salida del circuito que se muestra en la Figura\(\PageIndex{7}\) si la señal de entrada es una onda cuadrada de pico de 10 kHz y 2 V sin componente de CC.
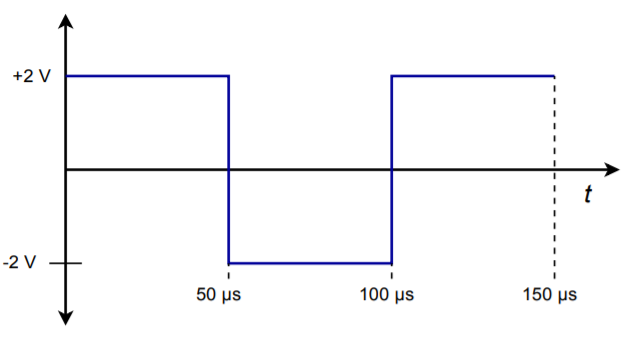
Figura\(\PageIndex{9}\): Forma de onda de entrada para Ejemplo\(\PageIndex{3}\).
El primer paso es descomponer la forma de onda de entrada en componentes simples de integrar y determinar la forma básica del resultado. La entrada se esboza en la Figura\(\PageIndex{9}\). La entrada se puede romper en dos partes: un potencial de 2 V no cambiante de 0 a 50\(\mu\) s, y un potencial de −2 V no cambiante de 50\(\mu\) s a 100\(\mu\) s. La secuencia se repite después de esto.
\[V_{in} (t) = 2 \text{ from } t=0, \text{ to } t=50 \mu s \\ V_{in} (t)= − 2 \text{ from } t=50 \mu s, \text{ to } t=100 \mu s \nonumber \]
En esencia, estamos diciendo que la entrada puede ser tratada como\(\pm\) 2 V DC por cortos periodos de tiempo. Debido a que la integración es una operación de suma, a medida que avanza el tiempo, el área barrida por debajo de la señal de entrada aumenta, y luego disminuye debido a los cambios de polaridad. De ello se deduce que la salida crecerá (o encogerá) de manera lineal, ya que la entrada es constante. Es decir, se producirán rampas rectas durante estos periodos de tiempo. La única diferencia entre ellos será la polaridad de la pendiente. De esto encontramos que la forma de onda de salida esperada es una onda triangular. Todo lo que tenemos que hacer ahora es determinar el valor pico de la salida. Para ello, realice la integral definida utilizando la primera porción de la onda de entrada.
\[ V_{out}(t)= − \frac{1}{R_iC} \int V_{in} (t) dt \\ V_{out}(t) = − \frac{1}{10 \text{ k} \times 10 \text{ nF}} \int_{0}^{50\mu s} 2 dt \\ V_{out}(t) = −10^4 \times 2 \times \left. t\right|_{t=0}^{t=50 \mu s} \\ V_{out}=−20000 \times 50 \mu s \\ V_{out}=−1V \nonumber \]
Esto representa el cambio total a lo largo del intervalo de medio ciclo de 50\(\mu\) s. Se trata de un cambio pico a pico, diciendo que la salida es de 1 V negativa con respecto a su valor al final del semicicloprecedente. La integración para el segundo medio ciclo es similar y produce un cambio positivo. La forma de onda resultante se muestra en la Figura\(\PageIndex{10}\).
Figura\(\PageIndex{10}\): Forma de onda de salida para Ejemplo\(\PageIndex{3}\).
Tenga en cuenta que la onda se invierte efectivamente. Para entradas positivas, la pendiente de salida es negativa. Debido a que la frecuencia de entrada es mucho mayor que\(f_{low}\), podemos esperar una vez más una alta precisión. Aunque la solución parece implicar que el voltaje de salida debe oscilar entre 0 y −1 V, un integrador del mundo real produce de hecho la oscilación indicada de\(\pm\) 0.5 V. Esto se debe a que el condensador de integración en este circuito no podrá mantener indefinidamente el desplazamiento de CC requerido.
Ejemplo\(\PageIndex{4}\)
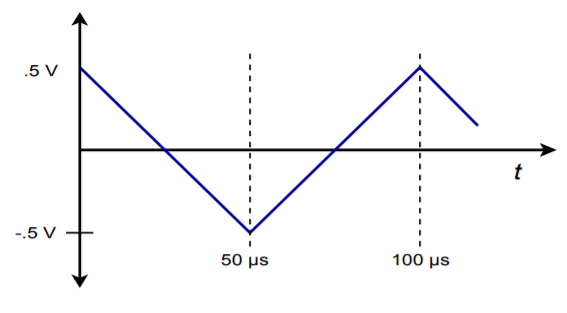
La figura\(\PageIndex{11a}\) muestra un integrador conectado a un acelerómetro. Este dispositivo produce un voltaje que es proporcional a la aceleración que experimenta 2. Los acelerómetros pueden sujetarse a una variedad de dispositivos físicos para determinar cómo responden los dispositivos a diversas entradas mecánicas. Esto sería útil, por ejemplo, para determinar experimentalmente las características de resonancia mecánica de una superficie. Otra posibilidad es la determinación de la aceleración lateral de un automóvil a medida que viaja por una esquina. Al integrar esta señal, es posible determinar la velocidad, y una integración adicional producirá posición. Si el acelerómetro produce el voltaje mostrado en la Figura\(\PageIndex{11}\), determine la forma de la curva de velocidad (asuma una onda de entrada no repetitiva).
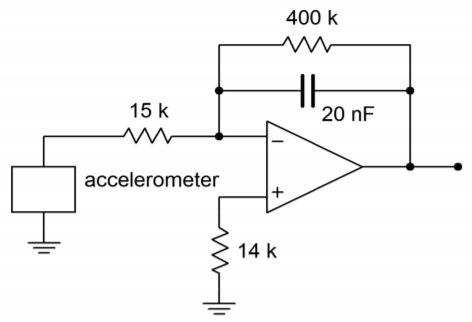
Figura\(\PageIndex{11a}\): Acelerómetro con circuito integrador.
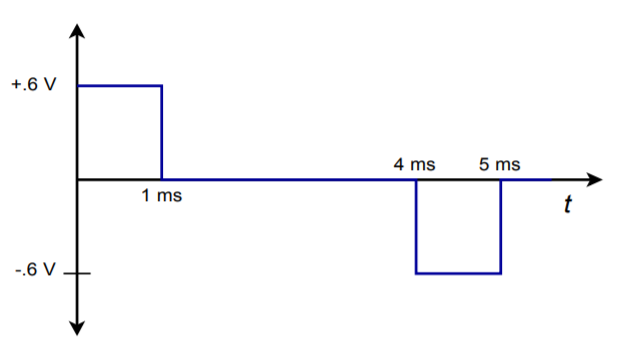
Figura\(\PageIndex{11b}\): Señal producida por acelerómetro.
Primero, verificar el límite de frecuencia del integrador para ver si se puede mantener una alta precisión. Si la forma de onda de entrada fuera repetitiva, sería aproximadamente 200 Hz (1/ 5 ms).
\[f_{low} = \frac{1}{2 \pi R_f C} \\ f_{low} = \frac{1}{2 \pi 400 \text{ k} \times 20 \text{ nF}} \\ f_{low} = 19.9 \text{ Hz}\nonumber \]
La señal de entrada está muy por encima del límite inferior. Tenga en cuenta que la forma de onda de entrada puede analizarse en forma por piezas, como si se tratara de una onda cuadrada. Las porciones positiva y negativa tienen una duración de 1 ms y un pico de 0.6 V. La única diferencia es la polaridad. Como estos son pulsos cuadrados, esperamos secciones de rampa para la salida. Para el pulso positivo (\(t = 0\)a\(t =1\) ms),
\[ V_{out}(t)= − \frac{1}{R_iC} \int V_{in} (t) dt \\ V_{out}(t) = − \frac{1}{15 \text{ k} \times 20 \text{ nF}} \int_{0}^{10^{-3}} .6 dt \\ V_{out}(t) = -3333 \times 0.6 \times \left. t\right|_{t=0}^{t=10^{-3}} \\ V_{out} = −2000 \times 10^{−3} \\ V_{out} = −2 V \nonumber \]
Esto nos dice que veremos una rampa de salida negativa con un cambio de −2 V. Para el periodo de tiempo entre 1 ms y 4 ms, la señal de entrada es cero, y así el cambio en el potencial de salida será cero. Esto significa que la salida permanecerá en −2 V hasta\(t = 4\) ms.
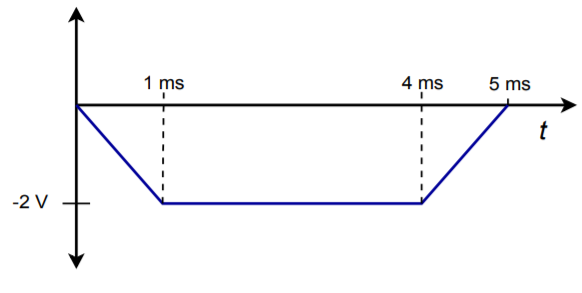
Figura\(\PageIndex{12}\): Salida del integrador.
Para el periodo comprendido entre 4 ms y 5 ms, se producirá una rampa positiva. Debido a que solo se cambia la polaridad con relación al primer pulso, podemos encontrar rápidamente que el cambio es\(+2\) V. La forma de onda de entrada no es repetitiva, por lo que la forma de onda de salida aparece como se muestra en la Figura\(\PageIndex{12}\). (Una entrada repetitiva causaría naturalmente que el integrador se “asiente” alrededor del suelo con el tiempo, produciendo la misma forma de onda básica, pero desplazada positivamente). Esta forma de onda nos dice que la velocidad del dispositivo bajo prueba aumenta linealmente hasta un punto. Después de este punto, la velocidad permanece constante hasta que se produce una disminución lineal de la velocidad. (Recuerde, el integrador invierte la señal, por lo que la curva de salida está efectivamente al revés. Si la onda de entrada indica una aceleración positiva inicial, la salida real es una velocidad positiva inicial). En una escala de tiempo diferente, estos son el tipo de formas de onda que podrían ser producidas por un acelerómetro montado en un automóvil que arranca en reposo, sube suavemente a una velocidad fija y luego frena suavemente hasta detenerse.
Referencias
1 El término 50% exacto se elige por conveniencia. Los valores reales son 50% de los calculados para potencia y ángulo de fase y 70.7% de los calculados para voltaje
2 Un acelerómetro mecánico consiste en una pequeña masa, resortes restauradores asociados y algún tipo de transductor capaz de leer el movimiento de la masa. Los diseños más recientes se pueden modelar usando chips micromecanizados, donde la deflexión de una viga de soporte de masa se mide indirectamente.