
11.7: Realizaciones de filtros de paso de banda
- Page ID
- 88026

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\(\newcommand{\longvect}{\overrightarrow}\)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)Hay muchas maneras de formar un filtro de paso de banda. Antes de introducir algunas de las posibilidades, debemos definir una serie de parámetros importantes. Como en el caso de los filtros de paso alto y bajo, el concepto de amortiguación es importante. Por razones históricas, los filtros pasabanda normalmente se especifican con el parámetro\(Q\), el factor de calidad, que es el recíproco del factor de amortiguación. Comparable a la frecuencia de ruptura es la frecuencia central, o pico, del filtro. Este es el punto de ganancia máxima. En los circuitos RLC, generalmente se le conoce como la frecuencia de resonancia. El símbolo para la frecuencia central es\(f_o\). Debido a que un filtro de paso de banda produce atenuación a ambos lados de la frecuencia central, hay dos frecuencias de “3 dB hacia abajo”. A la frecuencia inferior normalmente se le da el nombre\(f_1\), y se da la superior\(f_2\). La diferencia entre\(f_2\) y\(f_1\) se llama el ancho de banda del filtro y se abrevia como\(BW\). La relación entre la frecuencia central y el ancho de banda es igual a la del filtro\(Q\).
\[BW = f_2 − f_1 \label{11.15} \]
\[Q = \frac{f_o}{BW} \label{11.16} \]
Es importante señalar que la frecuencia central no es igual al promedio aritmético de\(f_1\) y\(f_2\). En cambio, es igual al promedio geométrico de\(f_1\) y\(f_2\).
\[f_o = \sqrt{f_1 f_2} \label{11.17} \]
Estos parámetros se muestran gráficamente en la Figura\(\PageIndex{1}\). Si un filtro requiere una unidad bastante baja\(Q\), digamos unidad o menos, el filtro se realiza mejor como una cascada de filtros separados de paso bajo y alto. Para mayores\(Q\) s, examinaremos dos posibles realizaciones. Los filtros de retroalimentación múltiple se utilizarán para\(Q\) s de hasta aproximadamente 10. Para\(Q\) s superiores a 10, se presenta el filtro estado-variable.
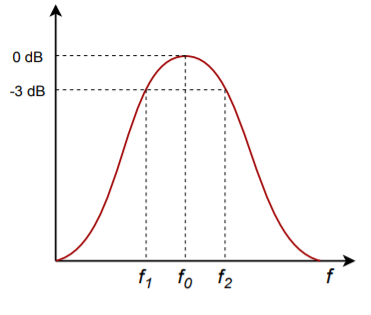
Figura\(\PageIndex{1}\): Respuesta de paso de banda.
11.7.1: Filtros de retroalimentación múltiple
El filtro básico de retroalimentación múltiple es de segundo orden. Contiene dos elementos reactivos como se muestra en la Figura\(\PageIndex{2}\). Un par de elementos crea la respuesta de paso bajo\((R_1C_1)\), y el otro par crea la respuesta de paso alto\((R_2C_2)\). Debido a esto, las pendientes de atenuación definitivas son\(\pm 6\) dB.
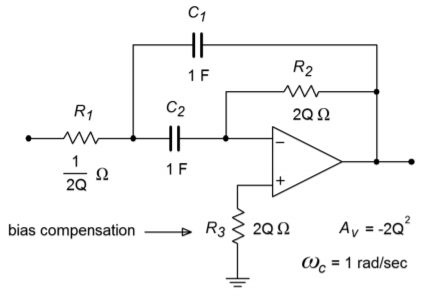
Figura\(\PageIndex{2}\): Filtro de paso de banda de retroalimentación múltiple.
Al igual que con los diseños de paso alto y bajo VCVS, el circuito de la Figura\(\PageIndex{2}\) se normaliza a una frecuencia central de 1 radián por segundo. La extrapolación a nuevas frecuencias centrales se realiza de la misma manera que se mostró anteriormente. La ganancia máxima para este circuito es
\[A_v = −2Q^2 \label{11.18} \]
Se puede ver en la Ecuación\ ref {11.18} que mayores\(Q\) s producirán mayores ganancias. Para un\(Q\) de 10, la ganancia de voltaje será de 200. Para que este circuito funcione correctamente, la ganancia de bucle abierto del amplificador operacional utilizado debe ser mayor a 200 en la frecuencia central elegida. Por lo general, se incluye un factor de seguridad de 10 para mantener la estabilidad alta y la distorsión baja. Al combinar estos factores, podemos determinar el mínimo aceptable\(f_{unity}\) para el amplificador operacional.
\[f_{unity} \geq 10 f_o A_v \label{11.19a} \]
o más directamente,
\[f_{unity} \geq 20 f_o Q^2 \label{11.19b} \]
Para una\(Q\) de 10 y una frecuencia central de 2 kHz, el amplificador operacional necesitará una\(f_{unity}\) de al menos 4 MHz. No es posible utilizar este tipo de filtro para alta frecuencia,\(Q\) trabajo alto, ya que los amplificadores operativos estándar pronto “se quedan sin vapor”. Aparte de esta dificultad, las altas ganancias producidas por valores incluso moderados para bien\(Q\) pueden ser poco prácticas. Para muchas aplicaciones, se preferiría una versión de ganancia de unidad. Esto no es particularmente difícil de lograr. Todo lo que tenemos que hacer es atenuar la señal de entrada por un factor igual a la ganancia de voltaje del filtro. Debido a que la magnitud de ganancia del filtro es\(2Q^2\), la atenuación debe ser
\[Attenuation = \frac{1}{2Q^2} \label{11.20} \]
Si bien es posible colocar un par de resistencias frente al filtro para crear un divisor de voltaje, hay una manera más eficiente. Podemos\(R_1\) dividirnos en dos componentes, como se muestra en la Figura\(\PageIndex{3}\). Siempre y cuando el equivalente de Thevenin de\(R_{1a}\) y\(R_{1b}\) como se ve desde el amplificador operacional sea igual al valor de\(R_1\), la frecuencia de sintonización del filtro no se cambiará. También se requiere que la relación del divisor de voltaje producida por\(R_{1a}\) y\(R_{1b}\) satisfaga la Ecuación\ ref {11.20}.
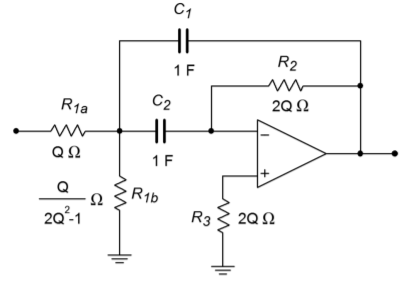
Figura\(\PageIndex{3}\): Filtro de retroalimentación múltiple con variación de unidad-ganancia.
Primero, determinemos la relación de las dos resistencias. Podemos comenzar fijando\(R_{1b}\) al valor arbitrario\(K\). Usando la regla del divisor de voltaje y la Ecuación\ ref {11.20},\(R_{1a}\) se encuentra:
\[Attenuation = \frac{R_{1b}}{R_{1a} + R_{1b}} \\ \frac{1}{2Q^2} = \frac{K}{R_{1a} + K} \\ R_{1a} + K = K 2Q^2 \nonumber \]
\[R_{1a} = K(2Q^2−1) \label{11.21} \]
Entonces, vemos que\(R_{1a}\) debe ser\(2Q^2−1\) veces más grande que\(R_{1b}\). Ahora debemos determinar el valor del\(K\) cual se establecerá la combinación paralela de\(R_{1a}\) y\(R_{1b}\) al valor requerido de\(1/(2Q)\), como basado en la Figura\(\PageIndex{2}\).
\[R_{Thevenin} = R_{1a} || R_{1b} \\ R_{Thevenin} = \frac{R_{1a} R_{1b}} {R_{1a}+R_{1b}} \\ R_{Thevenin} = \frac{K^2 (2Q^2−1)}{K(2Q^2−1)+K} \\ R_{Thevenin} = \frac{K^2 (2Q^2−1)}{K 2Q^2} \\ R_{Thevenin} = \frac{K(2Q^2−1)}{2Q^2} \nonumber \]
Porque\(R_{Thevenin} = 1/(2Q)\),
\[\frac{1}{2Q} = \frac{K (2Q^2−1)}{2Q^2} \\ 1 = \frac{K (2Q^2−1)}{Q} \nonumber \]
\[K = \frac{Q}{2Q^2−1} \label{11.22} \]
Debido a\(R_{1b}\) que se fijó en\(K\),
\[R_{1b} = \frac{Q}{2Q^2−1} \Omega \label{11.23} \]
Sustituyendo\ ref {11.22} en\ ref {11.21} rendimientos
\[R_{1a} = Q \Omega \label{11.24} \]
Al usar estos valores para\(R_{1a}\) y\(R_{1b}\), el filtro tendrá una ganancia máxima de unidad. Tenga en cuenta que como este esquema solo atenúa la señal antes de la ganancia, el\(f_{unity}\) requisito establecido en Ecuaciones\ ref {11.19a} -\ ref {11.19b} sigue siendo cierto.
Ejemplo\(\PageIndex{1}\)
Diseñe un filtro que solo pase frecuencias de 800 Hz a 1200 Hz. Asegúrese de que esta es una realización de ganancia de unidad.
Primero, debemos determinar la frecuencia central, ancho de banda, y\(Q\).
\[BW = f_2− f_1 \\ BW = 1200 Hz − 800 Hz \\ BW = 400 Hz \nonumber \]
\[f_o = \sqrt{f_1 f_2} \\ f_o = \sqrt{800 Hz \times 1200 Hz} \\ f_o = 980 Hz \nonumber \]
\[Q = \frac{f_o}{BW} \\ Q = \frac{980 Hz}{400 Hz} \\ Q = 2.45 \nonumber \]
El\(Q\) es demasiado alto para usar filtros separados de paso alto y bajo, pero suficientemente bajo para que se pueda usar un tipo de retroalimentación múltiple. Antes de continuar, debemos verificar para asegurarnos de que lo requerido\(f_{unity}\) para el amplificador operacional sea razonable.
\[A_v = −2Q^2 \\ A_v = −2 \times 2.45^2 \\ A_v = −12 \nonumber \]
\[f_{unity} \geq 10 A_v f_o \\ f_{unity} \geq 10 \times 12 \times 980 Hz \\ f_{unity} \geq 117.6 kHz \nonumber \]
Práctico cualquier amplificador operacional moderno excederá la\(f_{unity}\) especificación. Como este circuito muestra una ganancia de 12, se\(\PageIndex{3}\) utilizará la variación de ganancia unitaria mostrada en la Figura. Los cálculos para los componentes normalizados siguen.
\[R_2 = 2Q \\ R_2 = 2 \times 2.45 \\ R_2 = 4.9 \Omega \nonumber \]
\[R_{1b} = \frac{Q}{2Q^2−1} \\ R_{1b} = \frac{2.45}{2\times 2.45^2−1} \\ R_{1b} = .2226 \Omega \nonumber \]
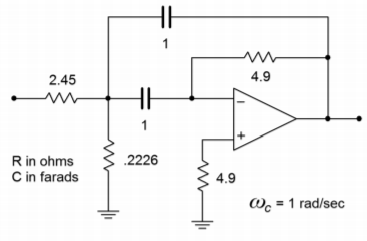
Figura\(\PageIndex{4}\): Cálculo de amortiguación inicial para Ejemplo\(\PageIndex{1}\).
El circuito normalizado resultante se muestra en la Figura\(\PageIndex{4}\). Ahora debemos encontrar el factor de escalado de frecuencia.
\[\omega_o = 2 \pi f_o \\ \omega_o = 2 \pi 980 Hz \\ \omega_o = 6158 \text{ radians per second} \nonumber \]
Para traducir nuestro circuito a esta frecuencia, debemos dividir las resistencias o los condensadores por 6158. En este ejemplo, usemos los capacitores.
\[C = \frac{1}{6158} \\ C = 162.4 \mu F \nonumber \]
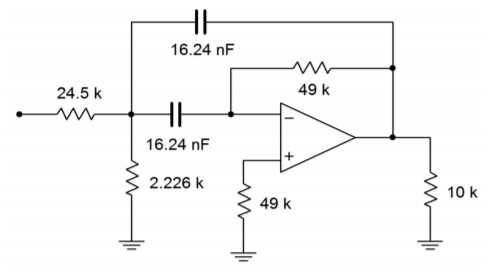
Figura\(\PageIndex{5}\): Impedancia final y escalado de frecuencia para Ejemplo\(\PageIndex{1}\).
Se necesita un escalado de impedancia adicional para valores de componentes prácticos. Un factor de unos pocos miles más o menos sería apropiado aquí. Para que los cálculos sean simples, elegiremos 10 k. Cada resistencia se incrementará en 10 k y cada condensador se reducirá en 10 k. El filtro escalado final se muestra en la Figura\(\PageIndex{5}\).
Simulación por Computadora
La simulación Multisim del circuito de Ejemplo\(\PageIndex{1}\) se muestra en la Figura\(\PageIndex{6}\). Tenga en cuenta que la ganancia es de 0 dB en la frecuencia central aproximada (aproximadamente 1 kHz). Además, se ven claramente los puntos de interrupción de −3 dB de 800 Hz y 1200 Hz. También se grafica la respuesta de fase de este filtro. Tenga en cuenta la transición de fase muy rápida en el área alrededor\(f_o\). Si se incrementara el\(Q\) de este circuito, esta transición sería aún más rápida.
En simulaciones como esta, es muy importante que se empleen modelos de amplificador operacional realistas. Si se usa una versión sobreidealizada, el comportamiento no ideal debido a una reducción de la ganancia de bucle pasará desapercibido. Este error es más probable que ocurra en circuitos con frecuencias centrales altas y/o altas\(Q\) s. Puede verificarlo traduciendo el filtro a una frecuencia más alta y volviendo a ejecutar la simulación. Por ejemplo, si\(C_1\) y\(C_2\) se disminuyen en un factor de 1000, la frecuencia central debe moverse hasta aproximadamente 1 MHz. Si la simulación se ejecuta de nuevo con un rango apropiado de frecuencias de prueba, verá que el ancho de banda limitado del amplificador operacional\(\mu\) A741 corta prematuramente la respuesta del filtro. El resultado es una frecuencia de pico más de una octava por debajo del objetivo, una amplitud máxima varios dB por debajo de 0 y una curva de respuesta asimétrica. Esta gráfica de respuesta se muestra en la Figura\(\PageIndex{6c}\). La gráfica de fases que acompaña también muestra una gran desviación del filtro ideal. Un desplazamiento de fase excesivo en las frecuencias medias y altas es claramente evidente.
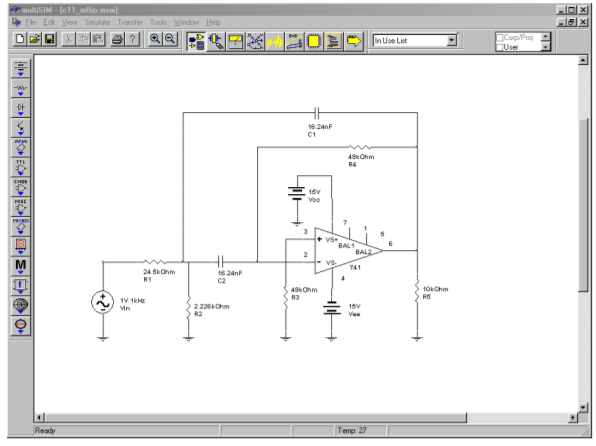
Figura\(\PageIndex{6a}\): Filtro pasabanda en Multisim.
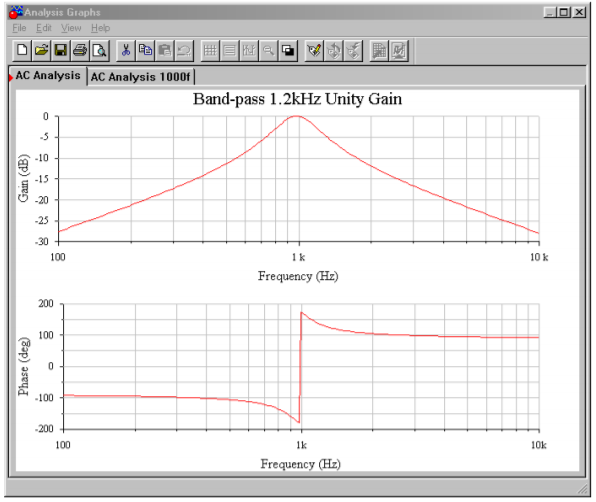
Figura\(\PageIndex{6b}\): Gráficas de ganancia y fase para filtro pasabanda.
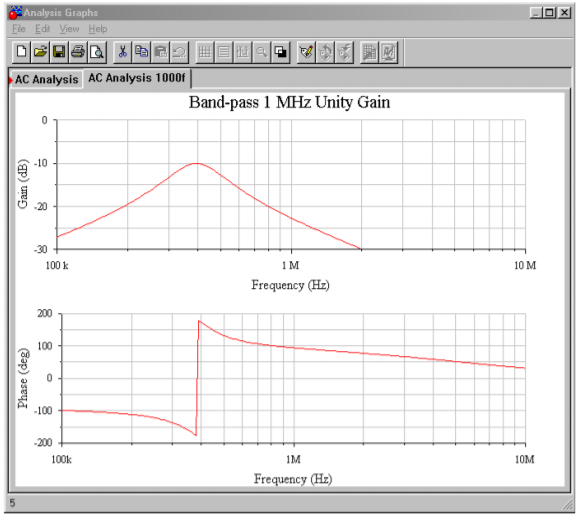
Figura\(\PageIndex{6c}\): Gráficas de ganancia y fase para 1000 veces el desplazamiento de frecuencia.
11.7.2: Filtro Variable de Estado
Como se señaló anteriormente, el filtro de retroalimentación múltiple no es adecuado para alta frecuencia o\(Q\) trabajo alto. Para aplicaciones que requieren\(Q\) s de aproximadamente 10 o más, el filtro variable de estado es la forma de elección. La variable de estado a menudo se conoce como el filtro universal, ya que las salidas de paso de banda, paso alto y paso bajo están disponibles. Con componentes adicionales, también se puede formar una salida de rechazo de banda. A diferencia de las formas de filtro anteriores examinadas, el filtro básico de variable de estado requiere tres amplificadores operacionales. Además, es un tipo de segundo orden, aunque son posibles tipos de orden superior. Esta forma recibe su nombre del análisis estado-variable. Uno de los primeros usos de los amplificadores operacionales fue en la construcción de computadoras analógicas (ver Capítulo Diez). Se utilizaron interconexiones de diferenciadores, amplificadores, veranos e integradores para resolver electrónicamente ecuaciones diferenciales que describían sistemas físicos. El análisis de variables de estado proporciona una técnica para resolver ecuaciones diferenciales involucradas. De hecho, las ecuaciones pueden describir las características de un filtro requerido. Aunque no examinaremos el análisis de variables de estado, esto no excluye un estudio del filtro estado-variable. Diseñar con filtros variables de estado no es realmente más complejo que nuestro trabajo anterior.
Además de su capacidad para proporcionar filtros estables con\(Q\) s relativamente altos, la variable estado tiene otras características únicas:
- Es relativamente fácil sintonizar electrónicamente en un amplio rango de frecuencias.
- Es posible ajustar independientemente la frecuencia\(Q\) y sintonización.
- Ofrece la posibilidad de crear otros filtros, más complejos, ya que tiene múltiples salidas.
El filtro de variable de estado se basa en integradores. La forma general utiliza un amplificador sumador y dos integradores, como se muestra en la Figura\(\PageIndex{7}\). Para entender cómo funciona este circuito a nivel intuitivo, recuerde que los integradores son básicamente filtros de paso bajo de primer orden. Como puede ver, la salida extrema derecha ha pasado a través de los integradores y produce una respuesta de paso bajo. Si la salida de paso bajo se suma desfasada con la señal de entrada, la información de baja frecuencia se cancelará, dejando solo los componentes de alta frecuencia. Por lo tanto, la salida del verano es la salida de paso alto del filtro. Si la señal de paso alto está integrada (usando la misma frecuencia crítica), el resultado será una respuesta de paso de banda. Esto se ve en la salida del primer integrador. La señal de paso de banda también se enruta de nuevo al amplificador sumador de entrada. Al cambiar la cantidad de la señal que se retroalimenta, la respuesta cerca de la frecuencia crítica puede alterarse, ajustando efectivamente el filtro\(Q\). Finalmente, el bucle se completa integrando la respuesta de paso banda, que produce la salida de paso bajo. En efecto, el rolloff de −6 dB por octava del segundo integrador compensa perfectamente la respuesta de paso de banda ascendente a continuación\(f_o\). Esto produce una respuesta plana a continuación\(f_o\). Arriba\(f_o\), la combinación de las dos curvas de respuesta descendente produce la respuesta esperada de segundo orden, paso bajo.
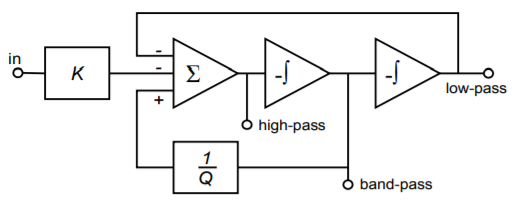
Figura\(\PageIndex{7}\): Diagrama de bloques del filtro estado-variable.
Dos formas populares de configurar el filtro variable de estado son las formas de ganancia fija y ganancia ajustable. La forma de ganancia fija se muestra en la Figura\(\PageIndex{8}\). Este circuito utiliza un total de tres amplificadores operacionales. El\(Q\) del circuito está configurado por una sola resistencia,\(R_Q\). \(Q\)s hasta 100 son posibles con filtros de variable de estado. Para las salidas de paso alto y bajo, la ganancia de este circuito es la unidad. Para la salida de paso de banda, la ganancia es igual a\(Q\).
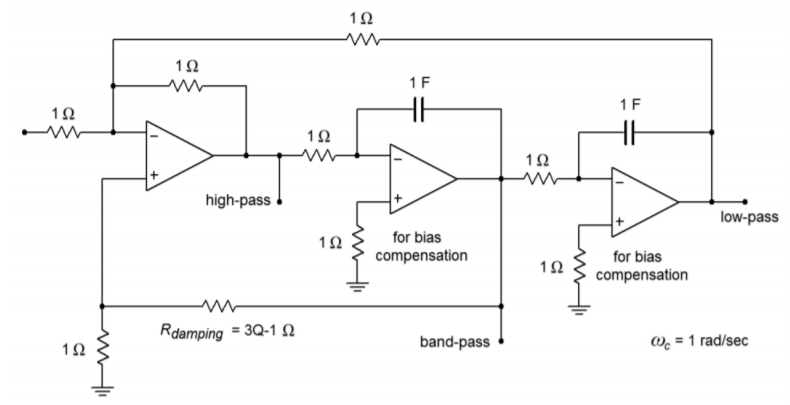
Figura\(\PageIndex{8}\): Versión de ganancia fija del filtro estado-variable.
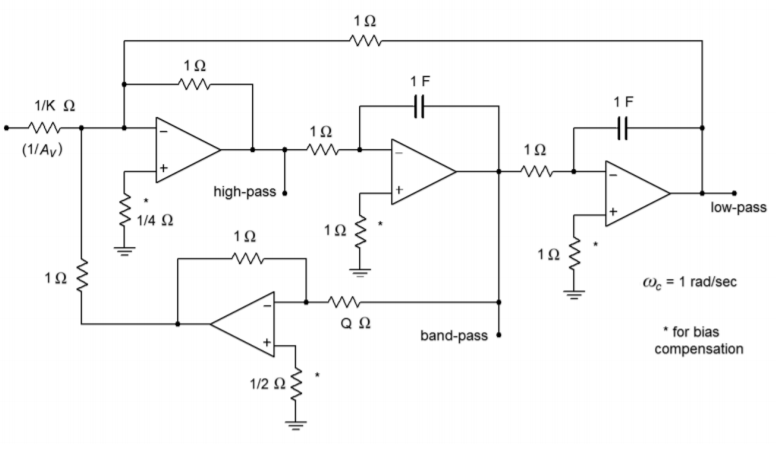
Figura\(\PageIndex{9}\): Versión de ganancia variable del filtro estado-variable.
La figura\(\PageIndex{9}\) muestra una versión de ganancia ajustable. Para el uso de paso alto o bajo, la ganancia es igual al valor arbitrario\(K\), mientras que para el uso de paso de banda, la ganancia es igual a\(KQ\). Esta variación requiere un cuarto amplificador operacional para aislar los ajustes\(Q\) y ganancia. Aunque cuatro amplificadores operacionales pueden sonar como una gran cantidad de dispositivos, recuerde que existe una variedad de paquetes de amplificador operacional cuádruple, lo que indica que el diseño físico real puede ser bastante pequeño. Además, aunque hay disponibles tres salidas diferentes, no es posible optimizar individualmente cada una para su uso simultáneo. En consecuencia, la variable de estado se usa con mayor frecuencia como un filtro de paso alto/bajo estable y conmutable, o como un filtro de\(Q\) paso de banda alto. Finalmente, de acuerdo con nuestro trabajo anterior, los circuitos se muestran normalizados a una frecuencia crítica de un radián por segundo. Si bien nos concentraremos en el diseño de paso de banda en esta sección, es posible utilizar estos circuitos para realizar varios filtros de paso alto y bajo, como los generados con las formas Sallen y Key. El procedimiento es casi idéntico y utiliza la misma frecuencia y factores de amortiguación (Figuras 11.6.13 y 11.6.18).
Ejemplo\(\PageIndex{2}\)
Diseñar un filtro pasabanda con una frecuencia central de 4.3 kHz y una\(Q\) de 25. Utilice la forma de ganancia fija.
Primero, determine el valor de la resistencia de amortiguación. Luego, escala los componentes para la frecuencia central deseada. Tenga en cuenta que a\(Q\) de 25 produce un ancho de banda de solo 172 hercios para este filtro (4.3 kHz/25).
\[R_{damping} = 3Q−1 \\ R_{damping} = 3 \times 25−1 \\ R_{damping} = 74 \Omega \nonumber \]
\[\omega_o = 2 \pi f_o \\ \omega_o = 2 \pi 4.3kHz \\ \omega_o = 27.02 k \text{ radians per second} \nonumber \]
Para traducir el filtro a nuestra frecuencia central deseada, necesitamos dividir las resistencias o los condensadores por 27,020. Para este ejemplo, usaremos los capacitores.
\[C = \frac{1}{27.02 k} \\ C = 37 \mu F \nonumber \]
Se requiere una escala de impedancia final para lograr valores de componentes razonables. Un valor razonable podría ser un factor de 5000.
\[C = \frac{ 37 \mu F}{5000} \\ C = 7.4 nF \nonumber \]
\[R_{damping} = 74\times 5000 \\ R_{damping} = 370 k \Omega \nonumber \]
Todas las resistencias restantes serán iguales\(5 k\Omega\).
Debido a que se trata de un filtro de paso de banda,
\[A_v = Q \\ A_v = 25 \nonumber \]
El filtro terminado se muestra en la Figura\(\PageIndex{10}\). El valor para\(R_{damping}\) es considerablemente mayor que el de las otras resistencias. Este efecto empeora a medida que\(Q\) se incrementa lo requerido. Si este valor se vuelve demasiado grande para componentes prácticos, puede reducirse a un valor más razonable siempre que la resistencia divisora asociada (desde la entrada no inversora a tierra) se reduzca en la misma cantidad. La relación de estas dos resistencias es lo que establece el filtro\(Q\), no sus valores absolutos. La reducción de estos valores alterará la compensación de corriente de polarización de entrada ideal, pero este efecto puede ignorarse en muchos casos o reducirse mediante el uso de amplificadores operacionales de entrada FET.
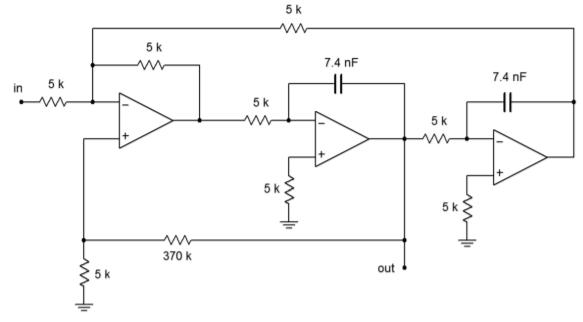
Figura\(\PageIndex{10}\): Diseño completado del filtro pasabanda por Ejemplo\(\PageIndex{2}\).
La alteración de este circuito para una configuración de ganancia variable requiere la adición de un cuarto amplificador como se muestra en la Figura\(\PageIndex{9}\). Se altera el cálculo de la resistencia de amortiguación y se necesita un valor para la resistencia determinante de ganancia de entrada. Los cálculos de componentes restantes no se modifican con respecto al ejemplo anterior. Tenga en cuenta que al establecer la constante\(K\) de ganancia en\(1/Q\), la ganancia de filtro final se puede establecer en unidad.