
5.10: Sistemas de radar
- Page ID
- 83258

El radar utiliza señales EM para determinar el alcance, la altitud, la dirección y la velocidad de los objetos llamados objetivos al observar las señales recibidas de las señales transmitidas llamadas formas de onda de radar. Las bandas de radar comunes y las aplicaciones se dan en la Tabla\(\PageIndex{1}\). El primer uso de señales EM para detectar objetivos fue demostrado en 1904 por Christian Hulsmeyer usando un generador de chispas [39]. Este sistema se promovió como un sistema para evitar colisiones de naves y solo detectó la dirección de los objetivos. La investigación contribuyó a nuevos desarrollos, con una aceleración significativa durante la Segunda Guerra Mundial. Radar es ahora una palabra por derecho propio, pero en 1941 se creó el término RADAR como acrónimo de radio detection and range.
| Banda | Frecuencia | Longitud de onda | Aplicación |
|---|---|---|---|
| HF | \(3-30\text{ MHz}\) | \(10-100\text{ m}\) | Radar sobre el horizonte, cartografía oceanográfica |
| VHF | \(30-300\text{ MHz}\) | \(1-10\text{ m}\) | Mapeo oceanográfico, monitoreo atmosférico, búsqueda de largo alcance |
| UHF | \(0.3-1\text{ GHz}\) | \(1\text{ m}-30\text{ cm}\) | Vigilancia de largo alcance, penetración de follaje, penetración en el suelo, monitoreo atmosférico |
| L | \(1–2\text{ GHz}\) | \(15–30\text{ cm}\) | Imágenes satelitales, cartografía, vigilancia de largo alcance, monitoreo ambiental |
| S | \(2-4\text{ GHz}\) | \(7.5–15\text{ cm}\) | Radar meteorológico, control de tránsito aéreo, vigilancia, búsqueda, IFF (identificar, amigo o enemigo) |
| C | \(4–8\text{ GHz}\) | \(3.75–7.5\text{ cm}\) | Radar hidrológico, topografía, control de incendios, clima |
| X | \(8–12\text{ GHz}\) | \(2.5–3.75\text{ cm}\) | Radar en la nube, buscador de misiles aire-aire, marítimo, turbulencia aérea, radar policial, imágenes de alta resolución, vigilancia perimetral |
| Ku | \(12–18\text{ GHz}\) | \(1.7–2.5\text{ cm}\) | Teledetección, control de incendios de corto alcance, vigilancia perimetral; pronunciado “kay-tú” |
| K | \(12=8–27\text{ GHz}\) | \(1.2–1.7\text{ cm}\) | Radar policial, teledetección, vigilancia perimetral |
| Ka | \(27–40\text{ GHz}\) | \(7.5–12\text{ mm}\) | Radar policial, guía de armas, teledetección, vigilancia perimetral, guía de armas; pronunciado “kay-a” |
| V | \(40–75\text{ GHz}\) | \(4–7.5\text{ mm}\) | Vigilancia perimetral, teledetección, guía de armas |
| W | \(75-110\text{ GHz}\) | \(2.7-4\text{ mm}\) | Vigilancia perimetral, teledetección, guía de armas |
Tabla\(\PageIndex{1}\): Bandas de radar IEEE y aplicaciones.
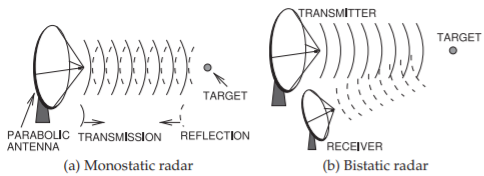
Figura\(\PageIndex{1}\): Sistema de radar: (a) radar monoestático con el mismo sitio utilizado para la transmisión de la señal del radar y recepción de la reflexión del objetivo; y (b) radar biestático con diferentes sitios de transmisión y recepción.
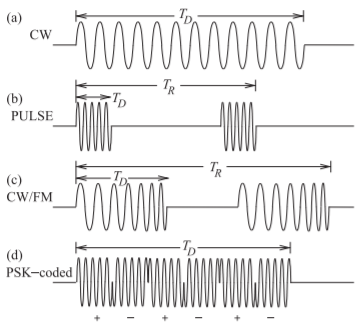
Figura\(\PageIndex{2}\): Formas de onda de radar: (a) onda continua; (b) onda pulsada; (c) onda continua modulada en frecuencia; y (d) forma de onda codificada en fase (codificada por PSK).
En un sistema de radar, normalmente se usa una antena de alta ganancia como una antena parabólica para transmitir una señal de radar, pero siempre se usa una antena de alta ganancia para recibir la señal. Si se usa la misma antena para transmitir y recibir (posiblemente dos antenas similares en el mismo sitio) el sistema se denomina radar monoestático (ver Figura\(\PageIndex{1}\) (a)). El radar con antenas de transmisión y recepción en diferentes sitios se denomina radar biestático (mostrado en la Figura\(\PageIndex{1}\) (b)).
En un radar monoestático que utiliza la misma antena para transmitir y recibir, el espacio se pinta con una señal de radar y la señal recibida se captura después de un retardo de propagación desde la antena hacia el objetivo y de regreso nuevamente. Entonces se puede desarrollar una imagen de radar. En muchos radares la antena receptora se dirige mecánicamente y a menudo se utiliza una rotación regular. Con los llamados radares de apertura sintética, una plataforma como una aeronave mueve el radar en una dirección y un escaneo mecánico o eléctrico unidimensional permite desarrollar una imagen bidimensional.
Las categorías de formas de onda de radar se muestran en la Figura\(\PageIndex{2}\). La forma de onda continua (CW) que se muestra en la Figura\(\PageIndex{2}\) (a) se encuentra en todo o la mayor parte del tiempo y se utiliza para detectar una reflexión de un objetivo. Esta señal reflejada es mucho más pequeña que la señal transmitida y puede ser difícil separar las señales transmitidas y recibidas. Se muestra una arquitectura de radar CW monoestática en la Figura\(\PageIndex{3}\) (a), donde\(^{1}\) se utiliza un circulador para separar las señales transmitidas y recibidas. La señal recibida se convierte a formato digital usando
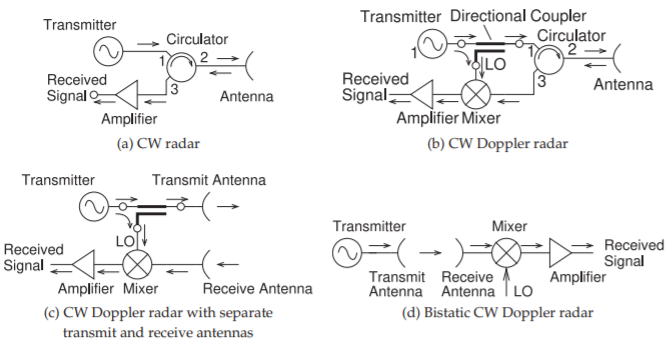
Figura\(\PageIndex{3}\): Arquitecturas de radar.
un ADC y el ancho de banda del ADC con el rango dinámico requerido determina el límite en el ancho de banda de la señal de radar. Generalmente cuanto más amplio sea el ancho de banda, mejor será el sistema de radar para identificar objetos. Una señal CW se puede usar para desarrollar una imagen, pero no es buena para determinar el rango de un objetivo. Para ello, es mejor una forma de onda de radar pulsado, como se muestra en la Figura\(\PageIndex{2}\) (b). El periodo de repetición,\(T_{R}\), es mayor que el tiempo de ida y vuelta al objetivo, por lo que el intervalo de tiempo entre la señal transmitida y la señal devuelta se puede utilizar para estimar el rango. La dirección está determinada por la orientación de la antena.
La arquitectura CW también se puede utilizar con radar pulsado. En el radar pulsado, la señal recibida contiene la señal objetivo deseada, multitrayecto y ecos, y desorden, como se muestra en la Figura\(\PageIndex{4}\) (a). Estos efectos también aparecen en la señal recibida en el radar CW, pero es mucho más fácil de ver en el radar pulsado. Identificar efectos de desorden y multitrayecto es un tema importante en el procesamiento de radar. Las formas de onda alternativas, especialmente las formas de onda moduladas digitalmente, ayudan a extraer la información deseada. La forma de onda modulada en frecuencia, o forma de onda chirp, en la Figura\(\PageIndex{2}\) (c), tendrá una reflexión que también será chirpeada, y la diferencia entre la frecuencia que se transmite y la recibida indica el alcance del objetivo, siempre que el objetivo no se mueva. La arquitectura de radar que se puede utilizar para extraer esta información se muestra en la Figura\(\PageIndex{3}\) (b). Los acopladores direccionales extraen una pequeña parte de la señal de transmisión y la utilizan como LO de un mezclador con la señal recibida como entrada. Una arquitectura similar se muestra en la Figura\(\PageIndex{3}\) (c), pero ahora se utilizan antenas de transmisión y recepción separadas para separar las señales transmitidas y recibidas en lugar de usar un circulador. De esta manera se puede obtener una mejor separación de las señales transmitidas y recibidas. La frecuencia del IF que resulta es proporcional al rango del objetivo.
Un concepto importante en el radar es el de sección transversal del radar (RCS) denotado\(\sigma\) (con unidades SI de\(\text{m}^{2}\)). El RCS de un objetivo es el área equivalente que
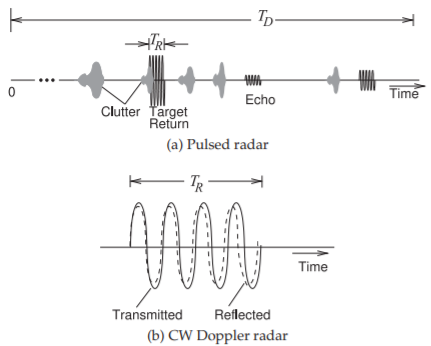
Figura\(PageIndex{4}\): Retornos de radar. La intensidad de la señal reflejada depende de la sección transversal del radar (RCS)\(\sigma\),, del objetivo. \(\sigma = 0.01\text{ m}^{2}\)para un pájaro,\(< 0.1\text{ m}^{2}\) para un avión sigiloso,\(1\text{ m}^{2}\) para un humano,\(2– 6\text{ m}^{2}\) para un avión de combate convencional,\(100\text{ m}^{2}\) para un avión comercial grande,\(200\text{ m}^{2}\) para un camión,\(10,000–100,000\text{ m}^{2}\) para un buque portacontenedores.
intercepta la potencia de una señal transmitida y vuelve a irradiar toda esa potencia isotrópicamente para producir la densidad de potencia observada en un receptor [40]. Por lo tanto, el RCS depende de la frecuencia de la señal transmitida, el tamaño del objetivo, el ángulo incidente y reflejado de la señal reflejada por el objetivo y la reflectividad del objetivo.
La potencia de la señal reflejada por el objetivo y capturada por la antena receptora viene dada por la ecuación de radar [40]:
\[\label{eq:1}P_{R}=\frac{P_{T}G_{T}A_{R}\sigma F^{4}}{(4\pi )^{2}R_{T}^{2}R_{R}^{2}} \]
donde\(P_{T}\) se entrega la potencia de transmisión a la antena de transmisión,\(G_{T}\) es la ganancia de antena del transmisor,\(A_{R}\) es el área de apertura efectiva de la antena receptora,\(F\) es el factor de propagación del patrón,\(R_{T}\) es la distancia desde el transmisor hasta el objetivo, y \(R_{R}\)es la distancia desde el objetivo hasta el receptor. \(F\)captura la pérdida efectiva debido al multitrayecto, que fue capturado en las comunicaciones mediante la introducción de una dependencia de la señal de\(1/d^{n}\), donde\(n\) va desde\(2\) hasta\(4\) dependiendo del entorno. En el espacio libre,\(F = 1\). Si se usa la misma antena para transmitir y recibir, y el multitrayecto no es importante (entonces\(F = 1\)), entonces la ecuación\(\eqref{eq:1}\) se convierte
\[\label{eq:2}P_{R}=\frac{P_{T}G_{T}A_{R}\sigma}{(4\pi )^{2}R^{4}} \]
donde\(R = R_{T} = R_{R}\). En la Sección 4.5.4 el área efectiva de la antena se relacionó con la ganancia de la antena. De la ecuación (4.5.14),
\[\label{eq:3}A_{R}=\frac{G_{r}\lambda^{2}}{4\pi} \]
y así, con\(G_{R} = G_{T}\), Ecuación\(\eqref{eq:2}\) se convierte
\[\label{eq:4}P_{R}=\frac{P_{T}G_{T}^{2}\lambda^{2}\sigma}{(4\pi)^{3}R^{4}} \]
| Frecuencia de radar,\(f_{T}\) | Velocidad relativa,\(v_{R}\) | ||
|---|---|---|---|
| \(1\text{ m/s}\) | \(100\text{ km/hr}\) | \(1000\text{ km/hr}\) | |
| \ (f_ {T}\) ">\(500\text{ MHz}\) | \ (v_ {R}\)\(1\text{ m/s}\) “>\(3.3\text{ Hz}\) | \ (v_ {R}\)\(100\text{ km/hr}\) “>\(92.6\text{ Hz}\) | \ (v_ {R}\)\(1000\text{ km/hr}\) “>\(925.9\text{ kHz}\) |
| \ (f_ {T}\) ">\(2\text{ GHz}\) | \ (v_ {R}\)\(1\text{ m/s}\) “>\(13.3\text{ Hz}\) | \ (v_ {R}\)\(100\text{ km/hr}\) “>\(370.4\text{ Hz}\) | \ (v_ {R}\)\(1000\text{ km/hr}\) “>\(3.704\text{ kHz}\) |
| \ (f_ {T}\) ">\(10\text{ GHz}\) | \ (v_ {R}\)\(1\text{ m/s}\) “>\(66.7\text{ Hz}\) | \ (v_ {R}\)\(100\text{ km/hr}\) “>\(1.852\text{ kHz}\) | \ (v_ {R}\)\(1000\text{ km/hr}\) “>\(18.519\text{ kHz}\) |
| \ (f_ {T}\) ">\(40\text{ GHz}\) | \ (v_ {R}\)\(1\text{ m/s}\) “>\(266.7\text{ Hz}\) | \ (v_ {R}\)\(100\text{ km/hr}\) “>\(7.407\text{ kHz}\) | \ (v_ {R}\)\(1000\text{ km/hr}\) “>\(74.074\text{ kHz}\) |
Tabla\(\PageIndex{2}\): Desplazamientos de frecuencia Doppler para objetivos que se mueven hacia un radar a velocidad\(v_{R}\).
Si\(f_{T}\) se transmite una señal de frecuencia y se refleja desde un objetivo en movimiento, hay un desplazamiento Doppler\(f_{D}\), y la señal recibida estará en frecuencia
\[\label{eq:5}f_{R}=f_{T}+f_{D}\quad\text{(target moving toward the radar)} \]
\[\label{eq:6}f_{R}=f_{T}-f_{D}\quad\text{(target moving away from the radar)} \]
donde
\[\label{eq:7}f_{D}=2v_{R}f_{T}/c \]
En Ecuación\(\eqref{eq:6}\)\(v_{R}\) se encuentra la componente radial de la velocidad del objetivo en relación con el radar, y\(c\) es la velocidad de la luz. Los desplazamientos Doppler típicos se muestran en la Tabla\(\PageIndex{2}\).
Si el objetivo se mueve, habrá un desplazamiento Doppler. Si el objetivo se mueve hacia un radar CW, entonces la frecuencia de la señal devuelta será mayor, como se muestra en la Figura\(\PageIndex{4}\) (b). Se puede utilizar una arquitectura similar a la utilizada con el radar chirp (ver Figuras\(\PageIndex{3}\) (bc)). El concepto se puede extender a los radares biestáticos, pero ahora se debe generar la referencia del oscilador local. Como se vio anteriormente, la frecuencia de la portadora de transmisión puede ser recuperada para señales moduladas digitalmente tales como las señales codificadas por PSK mostradas en la Figura\(\PageIndex{2}\) (d). Los radares avanzados de gama alta utilizan modulación digital y formas de onda similares a CDMA y explotan la codificación espacio-tiempo. Normalmente las formas de onda de radar a transmitir son chirped, que es una técnica que toma la forma de onda de transmisión deseada y la estira en el tiempo para que pueda amplificarse de manera más eficiente y se pueda transmitir más potencia. En el receptor, la señal de radar se comprime en el tiempo para que corresponda a la señal de transmisión original antes del chirping.
Debe ser evidente que los radares y las formas de onda del radar pueden optimizarse para la obtención de imágenes o para explotar los desplazamientos Doppler para rastrear objetivos en movimiento. Las imágenes son adecuadas cuando hay poco desorden, como mirar al aire. No obstante, es difícil detectar objetivos como los autos que se mueven en el suelo. El llamado radar de indicación de objetivos móviles en tierra (GMTI) se basa en los desplazamientos Doppler para discriminar objetivos en movimiento, y luego se ve comprometida la capacidad de obtener imágenes con precisión. Se dedica un esfuerzo considerable al desarrollo de formas de onda difíciles de detectar (sigilosas) y optimizadas para imágenes o GMTI.
Notas al pie
[1] Para el circulador mostrado, el puerto de entrada de energía 1 de un circulador sale en el puerto 2 y el puerto de entrada de energía 2 se entrega al puerto 3. Por lo que los puertos 1 y 3 están aislados.