
3.4: Controladores de retroalimentación de tasa
- Page ID
- 84890

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)Controladores de retroalimentación de tasa
La señal de retroalimentación de velocidad a menudo está disponible en un tacómetro o un giroscopio de velocidad en aplicaciones de control de posición. La señal se puede emplear para mejorar la respuesta del sistema de control de retroalimentación.
La configuración básica de retroalimentación de velocidad (Figura 3.4.1) incluye una constante de velocidad\(k_f\) que multiplica la señal de velocidad junto con un controlador estático\(K\),, en el bucle.
La función de transferencia de bucle cerrado para la configuración de retroalimentación de velocidad se puede obtener aplicando la regla de ganancia de Mason, originalmente definida para gráficos de flujo de señal. Para diagramas de bloques simples, la regla de ganancia se establece como:
\[\frac{y\left(s\right)}{r\left(s\right)}=\frac{F(s)}{1-\sum L_i(s)}\]
donde\(F(s)\) denota la ganancia de ruta directa de un nodo de entrada a un nodo de salida, y\(\sum L_i(s)\) denota la suma de las ganancias de bucle.

Tasa de retroalimentación como controlador PD
La ganancia de bucle efectiva en la configuración de retroalimentación de caso o velocidad con un controlador estático se calcula como:
\[\sum L_i\left(s\right)=-G\left(s\right)\left(k_fs+K\right)\]
La ganancia de bucle incluye una función de transferencia de planta en cascada con un controlador PD, donde el controlador cero se encuentra en:\(s=-\frac{K}{k_f}\). Por lo tanto, la configuración de retroalimentación de velocidad es idéntica a colocar un controlador PD en el bucle.
\(G\left(s\right)=\frac{n\left(s\right)}{d\left(s\right)};\)Entonces, la función de transferencia de bucle cerrado se obtiene como:
\[\frac{y\left(s\right)}{r\left(s\right)}=\frac{Kn\left(s\right)}{d\left(s\right)+\left(k_fs+K\right)n\left(s\right)},\]
El polinomio característico de bucle cerrado resultante se da como:
\[\mathit{\Delta}\left(s\right)=d\left(s\right)+\left(k_fs+K\right)n\left(s\right)\]
Mediante el uso de una simple manipulación de diagrama de bloques, la configuración de retroalimentación de velocidad (Figura 3.4.1) se puede representar de manera equivalente como un sistema de control de retroalimentación con un controlador PD en la ruta de retroalimentación (Figura 3.4.2).

Ejemplo\(\PageIndex{1}\)
La función de transferencia de un sistema masa-resorte-amortiguador se da como:\(G\left(s\right)=\frac{1}{ms^2+bs+k}\). Se asumen los siguientes valores de parámetros:\(m=1,b=2,\ and\ k=10\). Se desea mejorar la respuesta transitoria usando un controlador de realimentación de velocidad.
El polinomio característico de bucle cerrado para la configuración de retroalimentación de velocidad es:
\[\mathit{\Delta}\left(s\right)=s^2+\left(k_f+2\right)s+K+10\]
Suponemos que un polinomio característico deseado se selecciona como:\({\mathit{\Delta}}_{des}\left(s\right)=\left(s^2+6s+25\right)\).
Al comparar los coeficientes polinomiales, las ganancias requeridas del controlador se obtienen como:\(K=15,\ \ k_f=4\). La respuesta unidad-paso del sistema de bucle cerrado se muestra en la Figura 3.4.3.

Tasa de retroalimentación como controlador PID
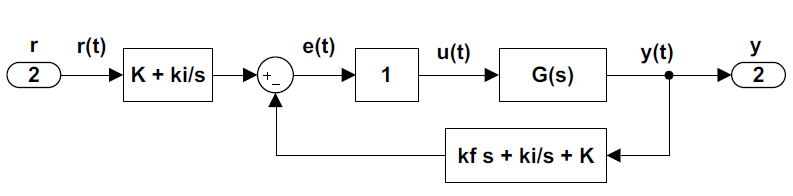
La retroalimentación de velocidad se puede usar junto con un controlador PI para implementar efectivamente un controlador PID. Un controlador de realimentación de velocidad con controlador PID en cascada se muestra en la Figura 3.4.4.

Deje que el controlador PI en cascada se defina como:\(K_{PI}\left(s\right)=K+\frac{k_i}{s}\); luego, usando la regla de ganancia (3.4.1), la ganancia de bucle efectiva se obtiene como:
\[\sum L_i\left(s\right)=-\left(K+\frac{k_i}{s}+k_fs\right)G\left(s\right)\]
Por lo tanto, el uso de un controlador PI en cascada con realimentación de velocidad equivale a colocar un controlador PID en el bucle de retroalimentación (Figura 3.4.5).
Suponiendo una función de transferencia de planta:\(G\left(s\right)=\frac{n\left(s\right)}{d\left(s\right)},\) la función de transferencia de bucle cerrado se obtiene como:
\[\frac{y\left(s\right)}{r\left(s\right)}=\frac{\left(Ks+k_i\right)n\left(s\right)}{sd\left(s\right)+\left(k_fs^2+Ks+ki\right)n\left(s\right)},\]
El polinomio característico de bucle cerrado resultante se da como:
\[\mathit{\Delta}\left(s\right)=sd\left(s\right)+\left(k_fs^2+Ks+k_i\right)n\left(s\right)\]
Ejemplo\(\PageIndex{2}\)
La función de transferencia de un sistema masa-resorte-amortiguador se da como:\(G\left(s\right)=\frac{1}{ms^2+bs+k}\). Se asumen los siguientes valores de parámetros:\(m=1,b=2,\ and\ k=10\). Se desea mejorar la respuesta transitoria así como la respuesta de estado estacionario usando retroalimentación de velocidad con el controlador PI en cascada.
El polinomio característico de bucle cerrado para la configuración de retroalimentación de velocidad con el controlador PI en cascada se da como:
\[\mathit{\Delta}\left(s\right)=s^3+\left(k_f+2\right)s^2+\left(K+10\right)s+k_i.\]
Suponemos que un polinomio característico de bucle cerrado deseado se selecciona como:\({\mathit{\Delta}}_{des}\left(s\right)=\left(s^2+10s+25\right)\left(s+5\right)\).
Entonces, al comparar los coeficientes polinomiales, las ganancias del controlador se obtienen como:\(k_f=13,\ \ K=65,\ \ and\ k_i=125\). La respuesta unidad-paso del sistema de bucle cerrado se muestra en la Figura 3.4.6.
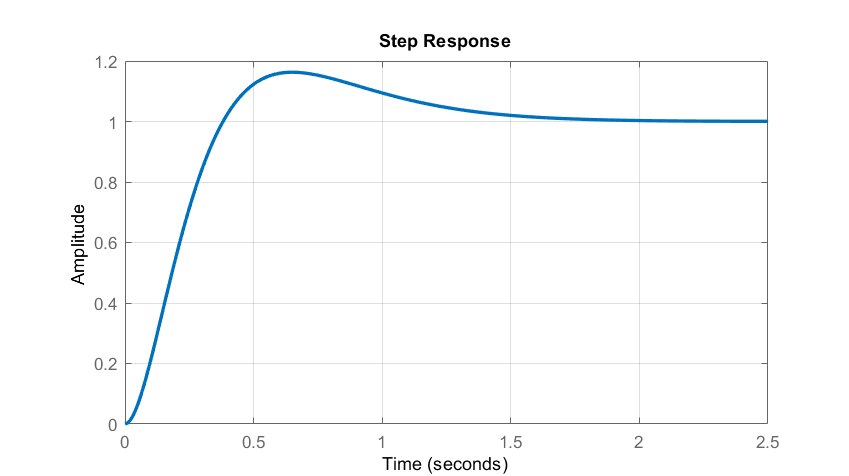
Al comparar las respuestas escalonadas en los Ejemplos 3.4.1 y 3.4.2, observamos que:
- La retroalimentación de velocidad con el controlador PI en cascada tiene un sobreimpulso mayor (\(18\%\)) en comparación con la retroalimentación de velocidad con el controlador estático (\(12\%\)).
- La retroalimentación de velocidad con el controlador PI en cascada tiene un tiempo de aumento menor (\(0.3\,sec\)) en comparación con la retroalimentación de velocidad con el controlador estático (aproximadamente\(0.5\,sec\)).
- La retroalimentación de velocidad con el controlador PI en cascada no tiene ningún error de estado estacionario en comparación con el error (\(40\%\)) en el caso de retroalimentación de velocidad con controlador estático.
- La respuesta escalonada en ambos casos se asienta aproximadamente\(1.5\,sec\).