
15: Motivación
- Page ID
- 87777

En la navegación de robots móviles basada en odometría, la precisión del seguimiento de la pose de cálculo muerto del robot depende de minimizar el deslizamiento entre las ruedas del robot y el suelo. Incluso un deslizamiento momentáneo puede llevar a un error en el rumbo que hará que el error en la estimación de ubicación del robot crezca linealmente a lo largo de su viaje. Por lo tanto, es importante determinar el coeficiente de fricción entre las ruedas del robot y el suelo, lo que afecta directamente la resistencia del robot al deslizamiento. Igual de importante, este coeficiente de fricción afectará significativamente el rendimiento del robot: la capacidad de empujar cargas.
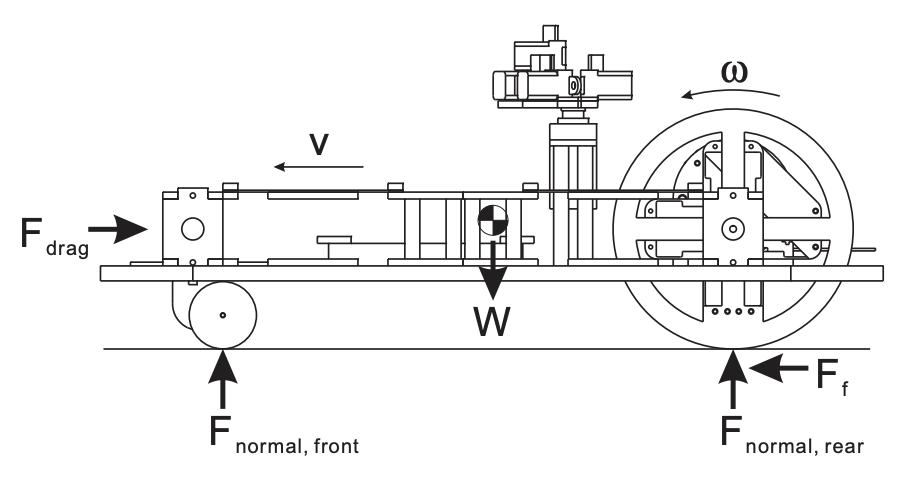
Cuando\(15.1\) se ordena al robot móvil de Figura que avance, entran en juego una serie de fuerzas. Internamente, los motores de accionamiento ejercen un par (no mostrado en la figura) sobre las ruedas, el cual es resistido por la fuerza de fricción\(F_{\mathrm{f}}\) entre las ruedas y el suelo. Si la magnitud de\(F_{\mathrm{f}}\) dictada por la suma de la fuerza de arrastre\(F_{\text {drag }}\) (una combinación de todas las fuerzas que resisten el movimiento del robot) y el producto de la masa y aceleración del robot es menor que la fuerza de fricción estática máxima\(F_{\mathrm{f}, \text { static }}^{\max }\) entre las ruedas y el suelo, las ruedas rodarán sin resbalar y el robot avanzará con velocidad\(v=\omega r_{\text {wheel }}\). Si, sin embargo, la magnitud de\(F_{\mathrm{f}}\) alcances\(F_{\mathrm{f} \text {, static }}^{\max }\), las ruedas comenzarán a deslizarse y\(F_{\mathrm{f}}\) caerán a un nivel inferior\(F_{\mathrm{f} \text {, kinetic }}\), la fuerza de fricción cinética. Las ruedas continuarán deslizándose\(\left(v<\omega r_{\text {wheel }}\right.\)) hasta que se restaure el movimiento relativo cero entre las ruedas y el suelo (cuando\(v=\omega r_{\text {wheel }}\)).
El valor crítico que define el límite entre el balanceo y el deslizamiento, por lo tanto, es la fuerza máxima de fricción estática. Esperamos que\[F_{\mathrm{f}, \text { static }}^{\max }=\mu_{\mathrm{s}} F_{\text {normal, rear }},\] donde\(\mu_{\mathrm{s}}\) está el coeficiente estático de fricción y\(F_{\text {normal, rear }}\) es la fuerza normal desde el suelo en las ruedas traseras, motrices,. Para minimizar el riesgo de deslizamiento (y poder empujar grandes cargas), las ruedas del robot deben diseñarse para un alto valor\(\mu_{\mathrm{s}}\) entre las ruedas y el suelo. Este valor, aunque difícil de predecir con precisión mediante modelación, se puede determinar por experimento.
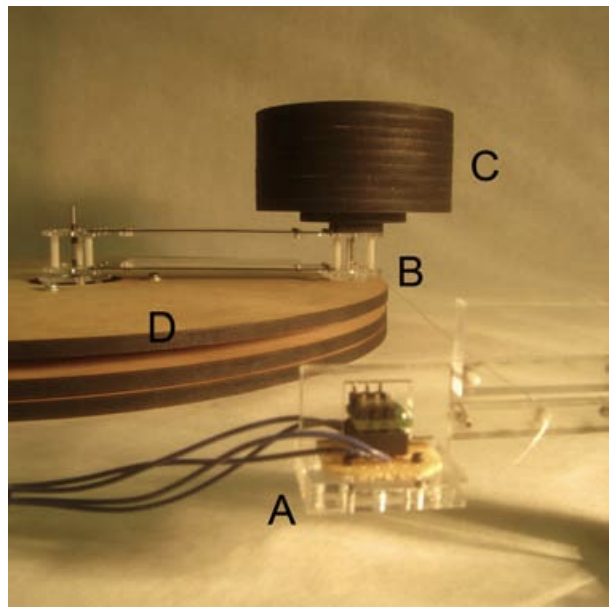
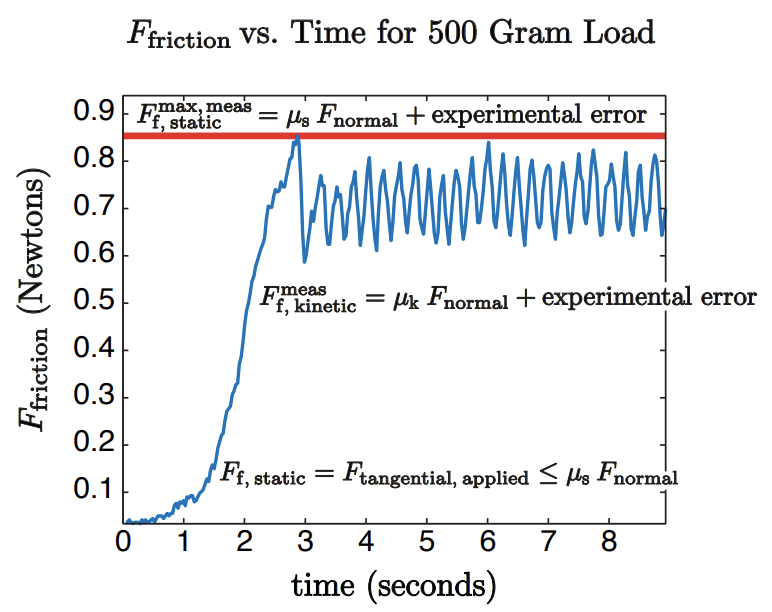
Primero realizamos experimentos para la fuerza de fricción\(F_{\mathrm{f}, \text { static }}^{\max }\) (en Newtons) en función de la carga normal\(F_{\text{normal, applied}}\) (en Newtons) y el área superficial (nominal) de contacto\(A_{\text{surface}}\) (en cm2) con el aparato de plataforma giratoria de fricción representado en la Figura 15.2. Los pesos nos permiten variar la carga normal y los insertos de “arandela” nos permiten variar la superficie nominal de contacto. Un experimento típico (a un valor determinado prescrito de\(F_{\text {normal, applied }}\) y\(A_{\text {surface }}\)) produce la traza de tiempo de la Figura\(15.3\) a partir de la cual se deduce la\(F_{\mathrm{f}, \text { static }}^{\max , \text { means }}\) (nuestra medición de\(F_{\mathrm{f}, \text { static }}^{\max }\)) como el máximo de la respuesta.
A continuación postulamos una dependencia (o “modelo”)\[F_{\mathrm{f}, \text { static }}^{\max }\left(F_{\text {normal, applied }}, A_{\text {surface }}\right)=\beta_{0}+\beta_{1} F_{\text {normal, applied }}+\beta_{2} A_{\text {surface }},\] donde esperamos -pero no supongamos a priori- de los Messieurs Amontons y Coulomb eso\(\beta_{0}=0\) y\(\beta_{2}=0\) (y por supuesto\(\beta_{1} \equiv \mu_{\mathrm{s}}\)). Para confirmar eso\(\beta_{0}=0\) y\(\beta_{2}=0\) -o al menos confirmar eso\(\beta_{0}=0\) y no\(\beta_{2}=0\) es falso- y para encontrar una buena estimación para\(\beta_{1} \equiv \mu_{\mathrm{s}}\), debemos apelar a nuestras mediciones.
Las técnicas matemáticas mediante las cuales determinar\(\mu_{\mathrm{s}}\) (y\(\beta_{0}, \beta_{2}\)) “con cierta confianza” a partir de datos experimentales ruidosos se conoce como regresión, que es el tema del Capítulo 19. La regresión, a su vez, se describe mejor en el lenguaje del álgebra lineal (Capítulo 16), y se construye sobre el concepto álgebra lineal de mínimos cuadrados (Capítulo 17).